汽车AMT数据采集与分析系统
- 格式:pdf
- 大小:1.56 MB
- 文档页数:66
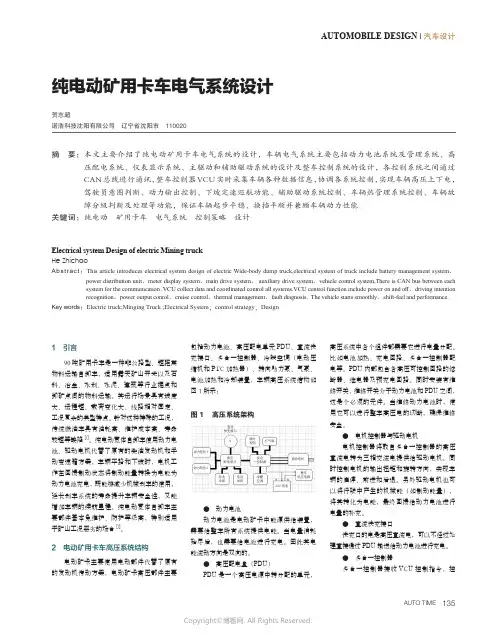
AUTOMOBILE DESIGN | 汽车设计纯电动矿用卡车电气系统设计贺志超诺浩科技沈阳有限公司 辽宁省沈阳市 110020摘 要: 本文主要介绍了纯电动矿用卡车电气系统的设计,车辆电气系统主要包括动力电池系统及管理系统、高压配电系统、仪表显示系统、主驱动和辅助驱动系统的设计及整车控制系统的设计,各控制系统之间通过CAN总线进行通讯,整车控制器VCU实时采集车辆各种数据信息,协调各系统控制,实现车辆高压上下电,驾驶员意图判断、动力输出控制、下坡定速巡航功能、辅助驱动系统控制、车辆热管理系统控制、车辆故障分级判断及处理等功能,保证车辆起步平稳、换挡平顺并兼顾车辆动力性能。
关键词:纯电动 矿用卡车 电气系统 控制策略 设计1 引言90吨矿用卡车是一种非公路型、短距离物料运输自卸车,适用露天矿山开采以及石料、冶金、水利、水泥、建筑等行业掘点和卸矿点间的物料运输。
其运行场景具有坡度大、运程短、载荷变化大、线路相对固定、工况复杂的典型特点。
针对这种特殊的工况,传统燃油车具有油耗高、维护成本高、寿命较短等缺陷[1]。
纯电动宽体自卸车使用动力电池、驱动电机代替了原有的柴油发动机和手动变速箱方案,车辆平路和下坡时,电机工作在回馈制动状态将制动能量转换为电能为动力电池充电,既能够减少机械刹车的使用,延长刹车系统的寿命提升车辆安全性,又能增加车辆的续航里程。
纯电动宽体自卸车主要部件基本免维护、防护等级高,特别适用于矿山工况恶劣的场合[2]。
2 电动矿用卡车高压系统结构电动矿卡主要使用电动部件代替了原有的发动机传动方案,电动矿卡高压部件主要包括动力电池、高压配电单元PDU、直流快充接口、多合一控制器、冷暖空调(电动压缩机和PTC加热器)、转向助力泵、气泵、电池加热和冷却装置,车辆高压系统结构如图1所示:图1 高压系统架构动力电池1动力电池2直流快充接口高压配电单元转向控制打气泵多合一控制器电池加热冷暖空调整车低压电路驱动电机24V电池电池冷却V● 动力电池动力电池是电动矿卡中能源供给装置,需要给整车所有系统提供电能。

自动变速器TCU解决方案摘要:基于RapidECU的自动变速器TCU快速开发解决方案,可以支持液动、气动和电机三种不同执行机构的自动变速器,使用户可以在数周内完成TCU原型样机的开发,实现离合器控制,选换挡操作和发动机接管控制等基本功能,在数月内完成批量产品样件的开发,实现中小批量装车试验,为自动变速器TCU大批量产业化打下良好基础。
概述自动变速器能够实现车辆自动起步,自动换挡,提高驾驶舒适性,减少驾驶员疲劳。
自动变速器还能够提高整车动力性,改善燃油经济性和排放,已经逐渐成为现代汽车的基本配置。
目前市场上常见的自动变速器有机械式自动变速器(AMT)、机械式无级自动变速器(CVT)、液力机械式自动变速器(AT)和双离合器式自动变速器(DCT)四种类型,按照执行机构不同可分为液动、气动和电机三种类型。
自动变速器系统是由TCU、选换挡机构及离合器机构组成,其中TCU采集传感器信息及CAN总线数据,经过运算处理后,控制执行机构动作,实现选换挡、离合器动作及发动机接管控制等,是自动变速器控制系统的核心。
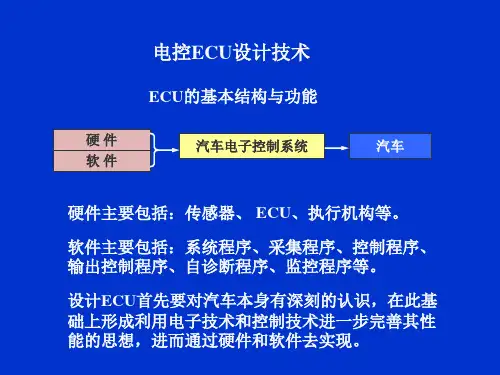
TCU电控单元主要包括控制器硬件和控制器软件,其中的控制器软件又包括基础软件与应用软件。
由于TCU电控系统执行机构的多样性及复杂性,无论是控制器硬件开发,还是基础软件或者应用软件开发都需要花费大量的时间、精力以及昂贵的费用。
如果没有合适的开发工具,TCU的研发和产业化几乎成了难以完成的任务。
使用RapidECU快速原型控制器可以在没有控制器硬件的情况下,提前进行控制算法的开发与验证,尤其适合于自动变速器等复杂系统电控单元的开发研究,快速原型的试验结果还可以为产品硬件设计提供参考。
因此,控制器快速原型在进行软件快速验证的同时,也降低了硬件返工几率,从而缩短开发周期,降低开发成本,提高控制器设计质量。
开发流程开发流程符合国际标准的V型开发模式,基于MATLAB\Simulink\Stateflow\ECUCoder图形化建模方式建立软件工程,完全零手工的一键式全自动代码生成,可以同时完成应用软件和基础软件模型自动代码生成,在开发过程中随时保持模型和代码的同步状态。
企业简介BRIEF INTRODUCTION加拿大凤凰公司成立于1975年5月,是专门致力于电法勘探的。
现在加拿大凤凰公司在其专业领域已是世界级一流的物探仪器和服务公司。
精专于激发极化法(FDIP、TDIP、SIP、CR)、天然源和人工源大地电磁法(MT、AMT、CSAMT)和时域或瞬变电磁法(TDEM/TEM)。
我们开拓创先使用全球定位卫星(GPS)同步技术于物探仪器系统并拥有国际专利,应用这项技术开发制造卫星同步物探场源发射和数据采集系统。
最新而广泛使用仪器如:系统2000卫星同步大地电磁(简称V5-2000 SSMT),多功能网络化物探数据采集和发射系统(V8,TXU-30)。
由于这些仪器使用GPS卫星信号作大面积全系统不间断同步,并且数据采集站设计基于最具挑战性的天然场源仪器技术要求,使用特低噪声电路,24位快速数字信号处理,加上局部无线网络功能,使数据质量、抗干扰能力和野外作业效率大幅度提高。
凤凰的仪器在世界各地被广泛用来寻找石油和天然气、有色和贵重金属、煤炭、铀、金伯利岩筒(钻石)、地热资源、地下水以及工程物探勘查。
凤凰的SSMT(卫星同步大地电磁)系统也已经使用于天然源地震长期不间断监测网络、地热发电厂地热资源长期监测和有害废物埋藏凰点长期监测。
主要产品MAIN PRODUCTS网络化多功能电法仪V8V8是凤凰公司最新一代多功能电法仪,汇集当代最新科技成就于一身,成功地解决了很多用户过去在实际生产中所遇到的瓶颈问题,其先进精确的GPS技术和无线网络技术的结合使V8即使在复杂的山区施工也变的如履平川;野外施工无需对钟,极大地提高了生产效率;大功率TXU-30发射机的问世让用户摆脱了发电机必须原配所带来的售后服务不能及时提供和及时维护的问题,同时也大大节约了购置成本;系统采样频点的无限加密,使分辨率得到了大幅提高;而且V8野外采集数据可实时显示为振幅曲线和相位曲线,数据资料质量一目了然。
第一节、方法原理频率域大地电磁法是以天然电磁场为场源来研究地球内部电性结构的一种重要的地球物理手段。
天然变化的电磁场或人工发射的电磁场向地下穿透并在地下介质中感生出受地下电性结构控制的大地电磁场,依据不同频率的电磁波在导体中具有不同趋肤深度的原理,在地表测量由高频至低频的地球电磁响应序列,经过相关的数据处理和分析来获得大地由浅至深的电性结构,进而根据不同地质体或地质构造的电性差异达到解决地质问题的目的,主要运用的频率范围为10-4Hz ~104Hz 。
根据利用的场源或频率范围不同电磁法可分为天然场源的大地电磁法MT (Magnetotelluric )、音频大地电磁法AMT (Audio Magnetotelluric )以及人工场源的可控源音频大地电磁法CSAMT (Controlled Source Audio Magnetotelluric )和利用无线电长波电台为场源的 RMT (Radio Magnetotelluric )等。
音频大地电磁法(AMT )相较于大地电磁法(MT ),研究频带较高,探测深度较浅稍。
其频率范围主要为1~104~5Hz ;音频大地电磁法理论模型基于电磁波传播理论和麦克斯韦方程组导出的水平电偶极源在地面上的电场及磁场公式:)2cos 3(2231-⋅⋅⋅=θπρr AB I E x (1) E I AB r y =⋅⋅⋅⋅34213ρπθsin (2) E i I AB r z =-⋅⋅⋅⋅()cos 1221201ρπμωρθ (3) H i I AB r x =-+⋅⋅⋅⋅()cos sin 1342310πρμωθθ (4) H i I AB r y =+⋅⋅⋅-()(cos )142323102πρμωθ (5)H i I AB r z =⋅⋅⋅32104ρπμωθsin (6)式中,I 为供电电流强度;AB 为供电偶极长度;r 为场源到接收点之间距离。

1 发展ITS的背景是什么?ITS的发展背景是:⑴ ITS是科技发展的必然产物,科学技术的发展推动了交通运输的发展,智能运输系统是现代科学技术发展的产物;⑵ ITS是信息化社会发展的必然要求;⑶ ITS是世界经济发展的必然要求;⑷ ITS是解决交通问题的根本途径.2.什么是ITS?智能交通系统(Intelligent Transport System, 简称ITS)利用现代高新技术(信息,通信,自动化,计算机,微电子等)实现出行者,运载工具.道路设施和环境的和谐统一,以实现安全.高效低耗.环保的交通环境.这些技术及提供服务总称为ITS.3.ITS解决交通运输问题与传统方法有什么不同?实现交通元素的智能化4.简述日本的ITS九大领域?导航系统的智能化;自动收费系统;安全驾驶的支援,交通管理的最优化;道路管理的高效率;公共交通的支援;提高商用车的利用率;帮助行人等;紧急车辆的运行支援.5.简述美国的ITS七大系统?先进的交通管理系统,先进的出行者信息系统,先进的公共交通系统,先进的乡村运输系统,商业车辆运营,先进的车辆控制和安全系统,自动公路系统.6.世界最早的ITS项目是何时何地的什么项目?60年代美国ERGS电子路径诱导系统、静态诱导7.美国ITS的发展历程有什么特点?1. IVHS战略计划(1) 1989年IVHS战略计划战略计划中的IVHS分成四个分系统:先进的交通管理系统(Advanced Traffic Management System,简称ATMS)、先进的交通信息系统(Advanced Traveler Information System,简称ATIS)、商用车运行管理系统(Commercial Vehicle Operation System,简称CVOS)、先进的车辆控制系统(Advanced Vehicle Control System,简称AVCS)。
(2)1991年的ISTEA1991年美国又提出新一轮的道路交通建设法案,即简称ISTEA (Intermodal Surface Transportation Efficiency Act)的《陆上综合交通运输效率化法案》,被美国交通运输界誉为确立美国交通运输新政策的一部划时代的交通运输建设新法案。
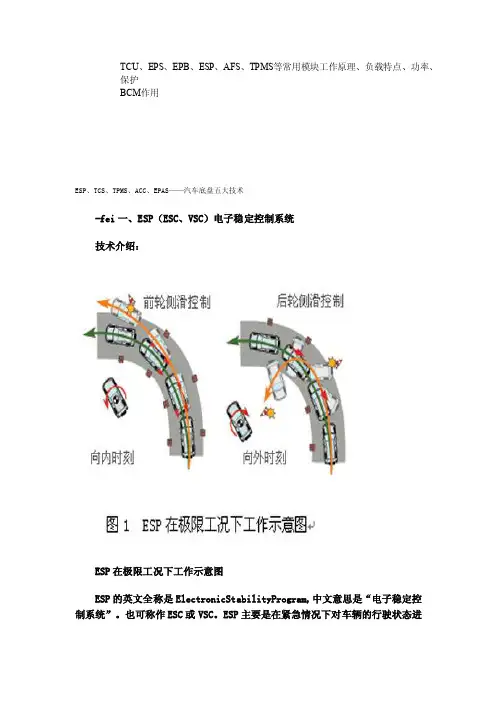
ESP、TCS、TPMS、ACC、EPAS——汽车底盘五大技术-fei一、ESP(ESC、VSC)电子稳定控制系统技术介绍:ESP在极限工况下工作示意图ESP的英文全称是ElectronicStabilityProgram,中文意思是“电子稳定控制系统”。
也可称作ESC或VSC。
ESP主要是在紧急情况下对车辆的行驶状态进行主动干预,它整合了ABS和TCS的功能,并且增加横摆扭矩控制――防侧滑功能,可以防止车辆在高速行驶转弯或制动过程中失控。
如图1左侧所视,车辆前轮侧滑,车辆出现转向不足。
此时,VSC系统通过制动器对内后轮施加一定的制动力,由此产生一个逆时针的力矩,改进车辆转向能力。
如图1右侧所视,车辆后轮侧滑,出现车辆甩尾和过度现象。
此时,VSC系统通过制动器对外前轮施加一定的制动力,由此产生一个顺时针的力矩,保证车辆的稳定性。
ESP系统主要在大侧向加速度、大侧偏角的极限工况下工作。
它利用控制左右两侧车轮制动力或驱动力之差产生的横摆力矩来防止出现难以控制的侧滑现象,保证车辆的路径跟踪能力,提高了车辆在高速行使时的安全性。
研究估计ESP降低了30%-50%的轿车单车致命事故和50%-70%的SUV单车致命事故。
技术应用情况:2008年全球的VSC装配率达到33%当今在欧洲和美国,每两辆新乘用车和轻型商用车就有一辆装配了ESP。
美国和欧洲的立法者最近都做出决定,要求强制装配ESP。
2011年9月起,美国所有4.5吨以下车辆都必须装配ESP。
2014年11月起,欧洲所有乘用车和轻、中、重型车辆都要求装配ESP。
在2008年,我国只有约11%的新车装配了ESP。
随着今年国内车市新车型的不断推出,目前我国20万元以上新车配备ESP的比率大幅提高,像别克新君越、新天籁、雅阁八代等都装配了ESP。
相信随着我国车市的进一步发展,电子稳定控制系统一定会如同当今的ABS一样,成为我国汽车的一个标准安全配置。
二、TCS牵引力控制系统技术介绍:TCS的英文全称是TractionControlSystem,中文意思是“牵引力控制系统”。
NAND FLASH在车载数据采集存储系统中的应用马良;翟涌【摘要】设计实现了一种以NAND FLASH为存储设备的车载数据采集存储系统.介绍了NAND FLASH的组织结构和存储特点,通过研究NAND FLASH的页编程工作原理,采用流水线技术实现了NAND FLASH的页编程过程,大大提高了数据的存储速度.同时实现了NAND FLASH的坏块管理方案,保证了数据的稳定可靠.实车应用表明,系统运行稳定可靠、实用性强,在车辆的自动变速控制系统的研究过程中,发挥了非常重要的作用.【期刊名称】《仪表技术与传感器》【年(卷),期】2014(000)004【总页数】4页(P53-55,59)【关键词】车载系统;数据存储;单片机;流水线技术【作者】马良;翟涌【作者单位】北京理工大学机械与车辆学院,北京100081;北京理工大学机械与车辆学院,北京100081【正文语种】中文【中图分类】TP2730 引言自动变速操纵是一个传感器多、控制复杂的机电液一体化的复杂系统。
控制过程中信号不仅路数多,而且变化快,很难通过人工直接观测的方法分析研究[1-2]。
因此对于变速控制系统的研发,高速的同步随车数据采集存储系统必不可少。
虽然,随着电子技术新成果的不断引进,数据采集存储系统得到了很大的发展;但是,目前大多数存储系统不符合车辆控制研究的特色,实用性差、成本高、性价比低。
因此针对变速控制系统的研究需求,充分考虑了实车运行过程中振动冲击强、温度变化范围大等特点,设计开发了满足要求的高速车载数据采集存储系统。
由于NAND FLASH容量大、成本低、抗震动冲击能力强等特点,选用NAND FLASH 为存储设备,运用流水线技术实现了数据的快速存储[3]。
1 系统整体设计方案车辆自动变速控制系统中的传感器和执行器等相关信号,经过A/D转换电路存入电子控制单元ECU中,之后通过RS-232总线发送到系统下位机。
为了满足数据实时采集存储的要求,系统的下位机内部预留了两块16KB的数据缓存。
高速主轴误差测量标准解释说明以及概述1. 引言1.1 概述高速主轴误差测量是机械工程领域中一项重要的技术,它涉及到高速主轴在运转过程中的误差检测与评估。
随着现代制造业对产品质量要求的提高,对于精密加工和装配工艺的控制变得尤为重要。
主轴误差直接影响到机床、工具以及成品件等方面的加工精度和表面质量。
因此,准确测量和分析高速主轴误差,制定相应的标准和规范是非常必要且紧迫的。
1.2 文章结构本文将对高速主轴误差测量标准进行解释说明,并介绍其相关内容。
首先,在引言部分将给出整体概述、文章结构及目的,以帮助读者更好地理解本文内容。
接下来,在第二部分中,将详细讨论高速主轴误差及其影响因素、测量原理以及相关标准和规范的概述。
第三部分将介绍各种高速主轴误差测量方法与步骤,并阐述其基本原理及相关设备说明。
第四部分将重点分析和评估测量结果,探讨数据处理与展示方式、误差分析方法与技巧分享以及误差评估与合格标准的讨论。
最后,在结论与展望部分对高速主轴误差测量标准进行总结与归纳,提出可能存在的问题和改进方向,并给出未来相关研究方向的建议。
1.3 目的本文旨在介绍和解释高速主轴误差测量标准,使读者了解高速主轴误差的定义及其影响因素。
同时,通过详细介绍测量方法、步骤和所需设备以及数据处理方式等内容,帮助读者掌握正确且有效地进行高速主轴误差测量的技术手段。
此外,本文还将通过对测量结果进行分析评估,探讨合格标准及可能存在的问题和改进方向,为未来相关研究提供参考和建议。
通过本文的阐述和讨论,期望能够促进高速主轴误差测量技术在制造业中的应用,并为提升产品精度和质量做出贡献。
2. 高速主轴误差测量标准解释说明2.1 高速主轴误差及其影响因素高速主轴误差指的是加工机床在高转速下,由于各种因素引起的主轴旋转不稳定、非规律性振动或偏移现象。
这些误差可以由多种因素引起,包括机床结构刚度、轴承精度、动平衡质量等。
这些影响因素对主轴系统的稳定性和工件加工质量有着重要影响。
第四章交通流诱导系统4.1 概述交通流诱导系统,也有人称之为交通路线引导系统(TRGS, Traffic Route Guidance System)或车辆导航系统(VNS, Vehicle Navigation System)。
它利用全球定位系统(GPS, Global Positioning System)、电子交通图(Electronic Map of Traffic Network)、计算机和先进的通信技术,使得车载计算机能够自动显示车辆位置、交通网络图和道路交通状况,为驾驶员找到从当前位置到目的地的最优行驶路线,并协助出行者方便地进入原先没有去过的地方。
使用这种系统,能够有效地防止交通阻塞的发生,减少车辆在道路上的逗留时间,并最终实现交通流量在网络中各路段上的最优分配。
交通流诱导系统经历了从静态系统到动态系统的发展过程。
静态诱导系统研究始于20世纪70年代,使用记录交通状况的历史数据或者地理信息系统进行路线引导。
为了能够将实时的交通状况反映到诱导系统中,于是基于现代通信技术的动态路径诱导系统应运而生。
静态诱导就是经过电子地图提供距离(静态出行费用)最短路,动态诱导就是经过电子地图提供时间(动态出行费用)最短路,因为交通拥挤状况发生变化,所以各条路径的行程时间是动态变化的。
根据诱导信息作用的范围,交通诱导系统可以分为车内诱导系统和车外诱导系统两大类。
在车内诱导系统中,实时交通信息传输于个别车辆和信息中心之间,车辆上安装有定位装置、信息接收装置和路径优化装置。
由于诱导对象是单个车辆,因而也称为个别车辆诱导系统。
这类系统的诱导机理比较明确,容易达到诱导目的。
目前各发达国家研究的大部分是这种系统。
但其对车内设施和信息传输技术要求较高,造价相对昂贵。
相比之下,车外诱导系统的交通信息是在车流检测器、信息中心和可变标牌之间传输,诱导对象是车流群,因而也称为群体车辆诱导系统。
这种系统一般适用于高速公路或路段较长的城市交通流的诱导。
图5-2上位机软件主操作界面图5-3主操作界面程序框图
5.3.1实时监视模块主界面
实时监视模块主界面主要包含串行口的设置区、数据显示区以及文件操作区。
如图5—5所示。
图5-5实时监视模块主界面
5.3.2通信子模块
用于接收下位机传来的数据。
在LabVIEW中提供了功能强大的VIsA(vireⅢ11Tn吼rumenLatiOnSoftwareArchitecture虚拟仪器软件规范)库是仪器编程的标准的I/0应用程序接口(API)。
是计算机与仪器之间的软件层连接,用于实现计算机与仪器的通信,其中的串行通信节点函数就是用于完成对串行口的控制,包括对串行口的初始化、输入输出缓冲区的控制、串行口的读写等。
在进行异步数据传输时,以单个字节为单位,多个字节组成数据帧,连续数据帧组成数据流。
数据帧之间用帧同步字节分隔。
上位机接收数据流时,就是利用数据流中的帧同步字节作为数据流的坐标,找出数据帧的起始位置。
1)数据帧的格式
所有信号均10ms采样一次。
把10ms内采集的数据打包成为一个数据帧。
5.4.2图形曲线分析予模块
图5一13分析模块界面
数据的曲线分析是指把存储数据的文件打开、读取其中的数据,经过处理后再把数据在坐标轴上绘制成曲线。
通过这些图形曲线,可以分析换档特性,如选档时间、换档时间、离合器结合时间、离合器分离时间等,可以再现试验中的每一个时间历程,观察到试验中用肉眼无法观察到的毫秒级的过程。
将各信号数据在同一时间坐标轴上的曲线进行分析,可以观测各信号的时序关系、同一时刻的数值。
用这些数据曲线可以对自动换档控制系统进行详尽的事后分析。
1)中值滤波
串行通信中可能出现的偶然的数据值出错带来的结果主要是数据历史曲线的“尖峰毛刺”,当出现这种错误和进一步平滑曲线利于数据分析可对数据采用数字滤波的方法进行处理。
程序选用Median
Fiiter(中值滤波器)进行数
字滤波。
中值滤波器的原理为:
Y,=Median(,。
)i=0,1,2,…,”一l其中,Y(即<Y,li=0,l,2,…,佗一1))表示输出序列Filtered
X;n是输入。