高精度交流伺服系统
- 格式:ppt
- 大小:1.20 MB
- 文档页数:26
交流伺服与变频技术及应用(第4版)配套习题及答案第1章交流伺服技术概述习题11.什么是交流伺服技术?2.交流伺服技术有什么应用领域?3.交流伺服技术的主要特点是什么?4.交流伺服系统的基本组成是什么?5.解释交流伺服系统中的速度环、位置环和电流环的作用。
答案11.交流伺服技术是一种通过控制交流电机的电源电压和频率来实现精确控制的技术。
2.交流伺服技术广泛应用于工业生产线、机械设备和机器人等领域。
3.交流伺服技术的主要特点包括:高精度、高动态响应、快速稳定性、强鲁棒性和较低的噪声等。
4.交流伺服系统的基本组成包括:交流电机、伺服驱动器和运动控制器。
5.在交流伺服系统中,速度环用于控制电机的转速,位置环用于控制电机的位置,电流环用于控制电机的电流。
速度环通过调节电机的转速来实现速度控制,位置环通过调节电机的位置来实现位置控制,电流环通过调节电机的电流来实现电流控制。
第2章变频器的基本原理习题21.什么是变频器?2.变频器的主要功能是什么?3.变频器的工作原理是什么?4.变频器有哪些应用领域?5.解释变频器中的PWM技术和空间矢量调制技术。
答案21.变频器是一种能够实现交流电机的转速调节和控制的电力电子设备。
2.变频器的主要功能包括:调节交流电机的转速、提高电机的效率、改善电机的运行质量、降低电机的噪声和振动等。
3.变频器通过改变电源电压的频率和幅值来控制交流电机的转速。
它包括一个整流器将输入的交流电转换为直流电,然后经过一个逆变器将直流电转换为可调节的交流电供电给电机。
4.变频器广泛应用于空调系统、输送机械、机床设备和水泵等领域。
5.PWM技术(脉冲宽度调制技术)是一种通过改变脉冲的宽度来控制电机的速度的技术。
空间矢量调制技术是一种通过控制逆变器的开关状态来控制电机的转矩和速度的技术。
第3章交流伺服系统的控制方法习题31.交流伺服系统的主要控制方法有哪些?2.速度环控制的目标是什么?3.位置环控制的目标是什么?4.电流环控制的目标是什么?5.解释正弦角速度调制法和速度同步控制法。

伺服系统中如何实现高精度定位伺服系统是在现代控制理论基础上发展起来的一种机电传动装置,广泛应用于数控机床、自动化生产线、机器人等自动化设备中。
在伺服系统中,高精度定位是一项至关重要的技术指标,在实际应用中,不仅能够提高设备的加工精度和稳定性,还可以对工作效率和质量产生积极影响。
本文将围绕如何实现伺服系统的高精度定位来进行讨论。
一、伺服系统的组成和原理伺服系统通常包括伺服电机、减速器、编码器、伺服控制器等组成部分,其中,伺服电机的转速和转矩能够通过伺服控制器的控制输出来实现精确定位和精确控制。
伺服系统运作的核心是通过对反馈信号的采集和处理,对电机的输出转矩进行控制,实现精准的旋转和定位。
二、提高编码器分辨率编码器是伺服系统反馈控制的重要组成部分,主要用于采集伺服系统的位置和速度信息。
在实际应用中,提高编码器的分辨率是一种简单有效的方式,可以大幅提高定位精度。
常见的提高编码器分辨率的方法包括增大光栅片的尺寸和位数、增加编码器的采样频率等。
三、减小机械间隙在伺服系统中,机械间隙是影响定位精度的关键因素之一。
机械间隙分为传动系统间隙和系统刚性间隙两类。
在实际应用中,应通过调整传动件紧密度、优化传动系统设计等方式,尽量减小机械间隙,提高伺服系统的定位精度。
四、提高伺服控制器的响应速度伺服控制器的响应速度直接影响伺服系统的跟踪精度。
在实际应用中,可以通过增加控制器的带宽,提高信号采样频率等方式,提高控制器的响应速度和稳定性。
五、改进PID控制算法伺服系统的控制算法是影响定位精度的关键因素之一。
传统的基于PID控制算法的控制方法存在响应速度慢、超调量大等问题。
在实际应用中,可以通过改进PID控制算法。
如采用自整定PID控制算法、先进的模糊控制算法等,可以实现更为准确和稳定的控制。
六、结语在伺服系统中,高精度定位是实现精准控制和定位的重要技术指标。
通过改进编码器精度、减小机械间隙、提高控制器响应速度、改进控制算法等措施,可以不断提高伺服系统的定位精度和稳定性,在实际应用中发挥更好的作用。
交流伺服系统的优缺点随着自动化技术的不断发展,传统的机械式控制方式已经不能满足今天高速、高精度的工艺和生产需求。
作为先进的控制技术之一,交流伺服系统被广泛应用于机械控制领域。
在过去几十年的应用实践中,交流伺服系统已经得到了长足的发展和完善,它的优点和缺点也逐渐显现出来。
一、交流伺服系统的优点1. 高精度性能交流伺服系统有着出色的控制精度和位置重复性。
它可以在稳态和瞬态工况下保持高精度的运动控制,满足各种工艺、生产和装配的要求。
2. 快速响应性交流伺服系统具有快速响应的能力,它可以在瞬间调整机器的控制位置,响应速度很快。
这样可以保证机器在运动过程中的稳定性和准确性。
3. 安全可靠交流伺服系统可以采用多种检测方法来确保系统的安全可靠性。
例如采用编码器和霍尔传感器等来实现闭环反馈控制。
这样可以确保系统能够实时监测机器的运动状态,避免系统故障和损坏。
4. 节能环保交流伺服系统具有较高的效率,采用节能环保的驱动和控制方式,可以有效地降低能源消耗和废气排放,从而减少对环境的污染和影响。
二、交流伺服系统的缺点1. 成本较高交流伺服系统的成本比传统的控制系统要高得多,这是由于需要较高的技术和配套的软硬件设备。
同时,系统的修理和更新也需要投入大量的时间和费用。
2. 软件编程门槛较高交流伺服系统的编程和调试需要专业人员具备较高的技术能力和水平,而且软件系统常常需要定制化开发。
这对于一些小型企业或个人用户来说较为困难和复杂。
3. 对供电电源的要求较高交流伺服系统对供电电源的要求比较高,一些恶劣的工作环境会影响系统的正常运行,同时也增加了系统故障的风险。
4. 可靠性问题由于交流伺服系统采用了较多的电子元件,工作环境相对恶劣时,系统故障率有所上升,需要加强预防措施。
总结:交流伺服系统优点明显,是传统机械控制方式的先进替代品,可以极大提升生产效率和生产质量。
但同时也有缺点,一些高昂的成本、技术编程门槛和供电稳定等问题,需要系统的用户在应用前进行全面的了解和规划。
1.什么叫伺服系统?它主要的研究内容是什么?伺服系统(servomechanism) 包含功率放大和反馈,是使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。
它的主要任务是按控制命令的要求、对功率进行放大、变换与调控等处理,使驱动装置输出的力矩、速度和位置控制的非常灵活方便。
2.伺服系统的有哪几部分组成?一个伺服系统的构成一般有上位机、伺服放大器和伺服电机构成。
上位机:给伺服指令,如PLC、工控机、数控系统等;伺服放大器:接收并处理上位机的指令,控制电机转动角度和速度;伺服电机:执行机构,其自带的编码器把电机旋转的角度和速度反馈给伺服放大器,构成闭环,确保精度。
永磁同步电动机AC伺服系统主要由以下几个部分组成:永磁同步伺服电动机,速度和位置传感器,功率逆变器和PWSM生成电路,速度控制器和电流控制器。
3.对伺服系统的基本要求是什么?(1)稳定性好:稳定是指系统在给定输入或外界干扰作用下,能在短暂的调节过程后到达新的或者回复到原有平衡状态。
(2)精度高:伺服系统的精度是指输出量能跟随输入量的精确程度。
作为精密加工的数控机床,要求的定位精度或轮廓加工精度通常都比较高,允许的偏差一般都在0.01~0.00lmm之间。
(3)快速响应性好:快速响应性是伺服系统动态品质的标志之一,即要求跟踪指令信号的响应要快,一方面要求过渡过程时间短,一般在200ms以内,甚至小于几十毫秒;另一方面,为满足超调要求,要求过渡过程的前沿陡,即上升率要大。
4.伺服系统的主要特点是什么?(1)精确的检测装置:以组成速度和位置闭环控制。
(2)有多种反馈比较原理与方法:根据检测装置实现信息反馈的原理不同,伺服系统反馈比较的方法也不相同。
目前常用的有脉冲比较、相位比较和幅值比较3种。
(3)高性能的伺服电动机(简称伺服电机):用于高效和复杂型面加工的数控机床,伺服系统将经常处于频繁的启动和制动过程中。
伺服系统的基本要求及特征伺服系统是指由伺服电机、传感器、控制器和执行机构等组成的闭环控制系统。
它能够根据输入信号精确控制执行机构的位置、速度和力矩等参数。
伺服系统广泛应用于机械加工、自动化生产线、航空航天等领域,具有以下基本要求和特征。
一、基本要求1. 高精度控制:伺服系统需要能够实现高精度的位置、速度和力矩控制,以满足不同应用场景的需求。
2. 快速响应:伺服系统具备快速的响应能力,能够在瞬时改变的工况下迅速调整执行机构的运动状态。
3. 稳定性:伺服系统需要具备良好的稳定性,能够在长时间运行的过程中保持稳定的控制性能。
4. 可靠性:伺服系统需要具备高可靠性,能够在恶劣环境下稳定工作,并具备自动故障检测和报警功能。
5. 灵活性:伺服系统应具备灵活的控制方式,能够适应不同的工作模式和工作要求。
6. 易维护性:伺服系统需要具备良好的可维护性,以便及时发现和排除故障,减少停机时间。
二、特征1. 闭环控制:伺服系统采用闭环控制方式,通过不断地测量执行机构的状态和与预设值进行比较,实现对输出信号的精确控制。
2. 反馈控制:伺服系统通过传感器实时采集执行机构的位置、速度和力矩等参数,并将其反馈给控制器,用于控制决策。
3. 高精度传感器:伺服系统中的传感器需要具备高精度的测量能力,以保证控制系统的准确性和稳定性。
4. 高性能控制器:伺服系统的控制器需要具备高性能的运算能力和快速的响应速度,以满足高精度控制的要求。
5. 电流反馈控制:伺服系统中的电机控制通常采用电流反馈控制方式,通过控制电机的电流来实现对执行机构的精确控制。
6. 可编程控制:伺服系统的控制器通常具备可编程功能,能够根据不同的应用需求进行参数设置和控制策略的调整。
7. 多轴同步控制:伺服系统能够实现多个执行机构的同步控制,以满足复杂运动控制的需求。
8. 通信接口:伺服系统通常具备各种通信接口,可以与上位机进行数据交互和远程监控。
9. 自动故障检测和报警:伺服系统能够自动检测执行机构和传感器的故障,并及时发出报警信号,以减少故障对生产过程的影响。
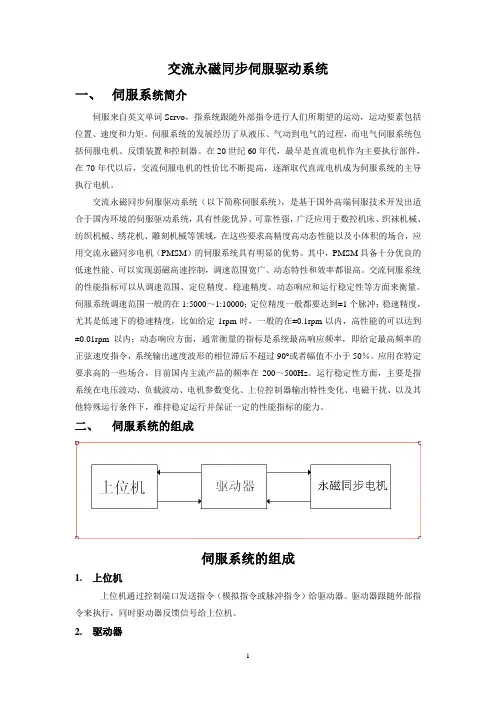
交流永磁同步伺服驱动系统一、伺服系统简介伺服来自英文单词Servo,指系统跟随外部指令进行人们所期望的运动,运动要素包括位置、速度和力矩。
伺服系统的发展经历了从液压、气动到电气的过程,而电气伺服系统包括伺服电机、反馈装置和控制器。
在20世纪60年代,最早是直流电机作为主要执行部件,在70年代以后,交流伺服电机的性价比不断提高,逐渐取代直流电机成为伺服系统的主导执行电机。
交流永磁同步伺服驱动系统(以下简称伺服系统),是基于国外高端伺服技术开发出适合于国内环境的伺服驱动系统,具有性能优异、可靠性强,广泛应用于数控机床、织袜机械、纺织机械、绣花机、雕刻机械等领域,在这些要求高精度高动态性能以及小体积的场合,应用交流永磁同步电机(PMSM)的伺服系统具有明显的优势。
其中,PMSM具备十分优良的低速性能、可以实现弱磁高速控制,调速范围宽广、动态特性和效率都很高。
交流伺服系统的性能指标可以从调速范围、定位精度、稳速精度、动态响应和运行稳定性等方面来衡量。
伺服系统调速范围一般的在1:5000~1:10000;定位精度一般都要达到±1个脉冲;稳速精度,尤其是低速下的稳速精度,比如给定1rpm时,一般的在±0.1rpm以内,高性能的可以达到±0.01rpm以内;动态响应方面,通常衡量的指标是系统最高响应频率,即给定最高频率的正弦速度指令,系统输出速度波形的相位滞后不超过90°或者幅值不小于50%。
应用在特定要求高的一些场合,目前国内主流产品的频率在200~500Hz。
运行稳定性方面,主要是指系统在电压波动、负载波动、电机参数变化、上位控制器输出特性变化、电磁干扰、以及其他特殊运行条件下,维持稳定运行并保证一定的性能指标的能力。
二、伺服系统的组成伺服系统的组成1.上位机上位机通过控制端口发送指令(模拟指令或脉冲指令)给驱动器。
驱动器跟随外部指令来执行,同时驱动器反馈信号给上位机。
高精度数字伺服控制系统的设计的开题报告一、研究背景数字伺服控制系统是一种常用于工业控制领域的控制系统。
数字伺服控制系统可以对控制对象进行高效精准的控制,如电机、传感器等。
而高精度数字伺服控制系统是基于数字信号处理、高精度测量技术及数字控制技术等多种技术集成而成的一种控制系统。
高精度数字伺服控制系统具有精度高、响应快、抗干扰性强等优点,是目前许多工业领域中应用广泛的一种控制系统。
因此,研究高精度数字伺服控制系统是非常有必要的。
二、研究目的本项目旨在设计和开发一种高精度数字伺服控制系统,该系统具有高度可靠性和高精度的控制性能。
同时,本项目将结合实际应用需求,设计出一个具有较好实用性和可扩展性的数字伺服控制系统,为实际工业生产提供一种高效、优质、可靠的控制解决方案。
三、研究内容本项目主要的研究内容包括:1.控制算法设计:本项目将通过对控制对象的建模和分析,设计出适用于高精度数字伺服控制系统的控制算法,以实现高精度控制。
2.硬件平台设计:本项目将设计硬件电路平台,包括信号采集模块、数字信号处理模块、数据存储模块、通信模块等,用于实现控制算法中需要的数据采集、处理和控制输出。
3.软件系统设计:本项目将设计控制系统的软件部分,包括实时控制代码、数据采集和处理代码、通讯代码等,实现控制算法和硬件平台之间的连接和通讯。
4.实验验证与结果分析:本项目将通过实验验证,对设计的高精度数字伺服控制系统的控制性能进行评估和分析,以评价该系统的控制性能。
四、研究意义通过本项目的研究,能够实现高精度数字伺服控制系统的设计和开发,提高控制系统的精度和可靠性,并为工业领域提供新的解决方案。
同时,本项目还具有如下意义:1.对数字控制系统有更深的了解和掌握。
2.对相关技术的应用和发展有更深刻的认识。
3.加强了学术交流与研究能力。
4.对工业生产有实际的应用价值。
第46卷2013年第9期9月MICROMOTORSVol.46.No.9Sep.2013收稿日期:2013-08-01作者简介:莫会成(1962),男,研究员级高工,国务院政府津贴专家,长期从事微电机及特种电机的研究与管理。
闵琳(1965),女,研究员级高工,长期从事微电机及特种电机的研究与设计。
王健(1968),男,硕士,高工,研究方向为基于DSP 的交流电机高性能驱动和控制,电机和电力电子系统的电子设计自动化等。
任雷(1964),男,博士,副教授,研究方向为步进电机、无刷直流电机、交流伺服电机理论、设计及控制。
现为西安微电机研究所客座研究员。
现代高性能永磁交流伺服系统综述———永磁电机篇莫会成1,闵琳1,王健2,任雷1(1.西安微电机研究所,西安710077;2.北京易能立方科技有限公司,北京100101)摘要:现代高性能永磁交流伺服系统由驱动控制器、永磁电机及传感器三大部分构成,对其中的高性能永磁交流伺服电机进行了较为全面的总结介绍。
在分析现代高性能永磁交流伺服电机的概念、发展历程、技术现状及市场应用的基础上,分别介绍了稀土永磁交流伺服电机的定、转子结构和特点;并对目前流行的分数槽集中绕组永磁交流伺服电机的特点及谐波、齿槽转矩等相关问题进行了简单的讨论;同时对多相永磁交流伺服电机、永磁直线交流伺服电机等其他永磁伺服电机也做了简单介绍;最后针对永磁交流伺服电机在高性能、变频供电、可靠性及系统级设计等各方面的特殊性,讨论分析了其设计特点。
关键词:永磁交流伺服电机;技术发展及现状;结构特点;设计特点中图分类号:TM351;TM341文献标志码:A文章编号:1001-6848(2013)09-0001-10Summarizing Commentary on Modern High-performance ACServo System-PM Servo MotorMO Huicheng 1,MIN Lin 1,WANG Jian 2,REN Lei 1(1.Xi'an Micromotor Research Institute ,Xi'an 710077,China ;2.Beijing E-Cube Technologies Co.,Ltd.,Beijing 100085,China )Abstract :Modern high-performance AC servo systems are composed of three parts :drive controller ,perma-nent magnet motor and sensor ,the paper mainly introduced the high-performance AC servo motor.On thebasis of the analysis of the concept ,development course ,technical situation and the application for modern high-performance AC servo motor ,introduced separately the structure characteristic of rotor and stator for the rare-earth AC servo motor ;discussed the characteristic ,harmonic and cogging torque of fractional-slot andconcentrated winding AC servo motor ;meanwhile brief introduced the multi-phase AC servo motor ,PM line-ar AC servo motor and other PM servo motor ;finally ,aiming at the various aspects particularity of PM AC servo motor in the high-performance ,varied-frequency ,reliability and system design ,analyzed its designcharacteristic.Key words :PM servo motor ;technical development and present situation ;structure characteristic ;design characteristic0引言电机是一种机电能量转换装置,除极少数特殊原理电机外,都是基于电磁感应原理,以磁场为媒介实现电能与机械能的转换。
伺服系统的优缺点伺服系统是一种广泛应用于工业自动化领域的控制系统,它通过精确地控制驱动器和伺服电机,实现对工作装置位置和速度的高精度控制。
尽管伺服系统在许多应用中表现出色,但它也存在一些优点和缺点。
本文将探讨伺服系统的优缺点,并说明其应用领域和局限性。
一、优点1. 高精度控制:伺服系统能够以非常高的精度控制工作装置的位置和速度。
这使得它适用于需要精确控制的应用,如机械加工、组装线和机器人等。
高精度控制可以提高生产效率和产品质量,并且能够满足一些特殊需求,如微切割和精密定位等。
2. 快速响应:伺服系统具有快速响应的特点,可以在短时间内对系统的输入做出相应调整,从而实现快速而准确的控制。
这使得伺服系统非常适用于要求高速精确定位、频繁起动和停止的应用,如流水线传送、打印机和纺纱机等。
3. 良好的稳定性:伺服系统经过精心调试和设计后,具有良好的稳定性。
它可以稳定地工作在不同的负载情况下,对外界干扰和变化具有较强的抗干扰能力。
这使得伺服系统能够应对复杂的工作环境和变化的负载,并保持稳定的运行。
4. 高扭矩密度:伺服电机具有高扭矩密度,可以在相对较小的体积和重量下提供较大的输出扭矩。
这使得伺服系统具有更高的动态响应能力和更小的惯性负载,可以实现更高的生产效率和更好的机械性能。
二、缺点1. 复杂的调试和维护:伺服系统相对于传统的控制系统具有更高的复杂性,需要专门的技术人员进行调试和维护。
对于一些不熟悉伺服系统的人员来说,可能需要更多的时间和精力来掌握其操作和故障排除方法。
2. 高成本:伺服系统相对于一般的控制系统来说,具有较高的成本。
它需要使用专门的驱动器和伺服电机,并且需要进行精确的调试和安装。
这使得伺服系统在一些成本敏感的应用中可能不太适用,或者需要仔细权衡成本与性能之间的关系。
3. 对电源质量要求高:伺服系统对电源质量有较高的要求,需要提供稳定的和纯净的电源供应,以避免对系统的运行和性能产生不利影响。
这可能增加了系统的设计和安装的难度,以及对环境电源的要求。
行业高精度伺服控制系统方案第1章项目背景与需求分析 (3)1.1 行业概述 (3)1.2 高精度伺服控制系统在行业的重要性 (3)1.3 项目需求分析 (4)第2章伺服控制系统技术概述 (4)2.1 伺服控制技术发展历程 (4)2.1.1 电气伺服控制技术的初期阶段 (4)2.1.2 数字化伺服控制技术 (5)2.1.3 现代伺服控制技术 (5)2.2 伺服控制系统的基本原理 (5)2.2.1 控制器 (5)2.2.2 驱动器 (5)2.2.3 执行机构 (5)2.2.4 反馈环节 (5)2.3 伺服控制系统的关键技术 (5)2.3.1 传感器技术 (6)2.3.2 驱动器技术 (6)2.3.3 控制算法 (6)2.3.4 伺服系统集成与优化 (6)第3章高精度伺服电机选型与设计 (6)3.1 伺服电机类型及特点 (6)3.2 高精度伺服电机的选型原则 (6)3.3 伺服电机的结构设计 (7)第4章伺服驱动器设计与实现 (7)4.1 伺服驱动器概述 (8)4.2 伺服驱动器硬件设计 (8)4.2.1 电路设计 (8)4.2.2 元件选型 (8)4.2.3 接口设计 (8)4.3 伺服驱动器软件设计 (8)4.3.1 控制算法 (8)4.3.2 软件架构 (8)4.3.3 程序编写与调试 (8)4.3.4 系统优化与测试 (9)第5章位置控制系统设计 (9)5.1 位置控制原理 (9)5.1.1 控制系统模型 (9)5.1.2 位置传感器 (9)5.2 位置控制器设计 (9)5.2.1 控制器结构 (9)5.2.2 PID参数整定 (9)5.3.1 控制算法选择 (10)5.3.2 算法实现 (10)5.3.3 系统调试与优化 (10)第6章速度控制系统设计 (10)6.1 速度控制原理 (10)6.1.1 速度闭环控制 (10)6.1.2 速度反馈 (11)6.2 速度控制器设计 (11)6.2.1 控制器选型 (11)6.2.2 控制器参数整定 (11)6.3 速度控制算法实现 (11)6.3.1 PID控制算法 (11)6.3.2 速度控制算法实现步骤 (11)6.3.3 算法优化 (11)第7章伺服系统功能优化 (12)7.1 伺服系统参数整定 (12)7.1.1 参数整定的必要性 (12)7.1.2 参数整定方法 (12)7.2 模糊控制策略在伺服系统中的应用 (12)7.2.1 模糊控制原理 (12)7.2.2 模糊控制器设计 (12)7.2.3 模糊控制在伺服系统中的应用实例 (12)7.3 神经网络控制策略在伺服系统中的应用 (12)7.3.1 神经网络控制原理 (12)7.3.2 神经网络控制器设计 (13)7.3.3 神经网络控制在伺服系统中的应用实例 (13)第8章伺服控制系统集成与调试 (13)8.1 伺服控制系统集成 (13)8.1.1 系统组成 (13)8.1.2 集成步骤 (13)8.1.3 注意事项 (13)8.2 伺服控制系统调试方法 (13)8.2.1 调试流程 (14)8.2.2 调试工具与仪器 (14)8.3 调试过程中的常见问题及解决方法 (14)8.3.1 电机运行不稳定 (14)8.3.2 电机发热严重 (14)8.3.3 位置控制精度差 (14)8.3.4 系统响应速度慢 (14)8.3.5 系统噪音大 (14)第9章伺服控制系统可靠性分析 (14)9.1 伺服系统可靠性概述 (14)9.2 伺服系统故障分析 (15)9.2.2 故障原因 (15)9.3 伺服系统可靠性提升策略 (15)9.3.1 设计优化 (15)9.3.2 制造与装配 (15)9.3.3 运行与维护 (15)第10章伺服控制系统应用案例分析 (16)10.1 工业伺服控制系统应用案例 (16)10.1.1 案例背景 (16)10.1.2 系统方案 (16)10.1.3 应用效果 (16)10.2 服务伺服控制系统应用案例 (16)10.2.1 案例背景 (16)10.2.2 系统方案 (16)10.2.3 应用效果 (16)10.3 特种伺服控制系统应用案例 (16)10.3.1 案例背景 (17)10.3.2 系统方案 (17)10.3.3 应用效果 (17)第1章项目背景与需求分析1.1 行业概述我国经济的持续发展和科技进步,行业在我国得到了广泛关注和迅速发展。
基于EtherCAT的高性能交流伺服控制系统设计分析发布时间:2021-06-23T05:50:28.176Z 来源:《当代教育家》2021年9期作者:翟红云莫毅[导读] 伺服控制系统在现代的机械运动系统中起到了很重要的执行功能,同时伺服控制系统的性能也决定了整体机械系统的性能强度。
广西工业职业技术学院摘要:伺服控制系统在现代的机械运动系统中起到了很重要的执行功能,同时伺服控制系统的性能也决定了整体机械系统的性能强度。
现阶段,新的高性能伺服系统,大多采用了永磁同步电机全数字伺服系统,电子轴转动能够代替传统的机械轴转动,并可以利用工业以太网,同时控制多台电动机运行。
EtherCAT技术突破了传统以太网的瓶颈,能够让伺服系统的性能得到巨大提升,对此,本文对基于EtherCAT的高性能交流伺服控制系统进行了研究,并提出了一定的设计方式,以期达到提高伺服控制系统性能的目的。
关键词:EtherCAT;高性能;伺服控制系统前言:随着科技的进步,现代电子技术与交流驱动技术以及计算机信息技术都得到了飞速的发展,以往交流伺服控制系统中,对电机的控制是十分复杂的,同时性能也比较差,但这种问题已经随着新技术的发展逐渐得到了解决交流,伺服控制系统也在向着高性能方向转变,基于以太网的运动控制器在多方面,的机械设备运行中得到了广泛地使用,并且也能够让系统性能得到极大的提升。
1 基于EtherCAT的高性能交流伺服控制系统概述1.1 伺服运动控制系统伺服运动控制系统能够通过传输指令来对系统的运行动作进行控制,并做出相应的机械运动,通常而言,并不需要太大的功率,但是在制动方面需要满足频繁地切换,同时也要保证定位的精确程度,伺服运动控制系统被广泛运用在控制机器人、导航系统、自动机床等产业中。
位置伺服控制系统指的是将位置信号作为被控制的变量,当变量是速度信号时,该系统则为速度伺服控制系统[1],在这个系统当中,速度指令会经常发生变化,这也意味着系统对变化的指令,必须能够快速反应,尽量缩短响应时间,同时系统也要有较高的抗干扰能力,从而保障运行的流畅性位置,伺服系统对设备的精确定位有着较高的要求,为了达到对速度的高要求,速度伺服控制也是不可缺少的一部分。
如何提高伺服系统的定位精度在机电控制系统等许多工业领域中,伺服系统是一个重要的系统,而伺服系统的定位精度是影响伺服系统性能的关键指标之一。
本文将介绍如何提高伺服系统的定位精度。
一、优化伺服系统参数伺服系统参数的优化对于提高伺服系统的定位精度起着至关重要的作用。
一般来说,伺服系统的参数包括比例增益、积分时间常数和微分时间常数等。
比例增益是指伺服系统输出与误差之比。
设置合理的比例增益可以有效地提高伺服系统的定位精度。
但是,过高的比例增益也会导致过度震荡,从而影响系统的性能。
在确定伺服系统参数时,应根据实际情况选择合适的参数。
为了达到最佳系统性能,可以通过实验或者仿真等方法来确定伺服系统的参数。
二、提高伺服系统控制精度提高伺服系统的控制精度也可以有效地提高伺服系统的定位精度。
伺服系统的控制精度包括位置测量、速度测量、负载惯性预测等。
在位置测量方面,使用高精度的编码器和传感器可以提高伺服系统的定位精度。
同时,应确保编码器和传感器的信号采集和处理系统的准确性。
在速度测量方面,采用良好的速度测量技术可以提高伺服系统的定位精度。
例如,可以使用德罗布滑动模式观测法等方法来提高速度测量的精度。
在负载惯性方面,通过精确地测量负载的惯性和预测负载惯性来提高伺服系统的定位精度。
三、使用高精度位置环在传统伺服系统中,位置环是控制系统的核心。
使用高精度位置环可以有效地提高伺服系统的定位精度。
高精度位置环具有较高的带宽和稳定性,可以减少系统的噪声干扰,从而提高系统的精度。
四、使用高精度伺服电机和减速器伺服电机和减速器也是影响伺服系统定位精度的关键因素之一。
使用高精度的伺服电机和减速器可以提高伺服系统的定位精度。
例如,使用高精度的同步电机和精密减速器等装置,可以提高伺服系统的定位精度。
五、结论伺服系统的定位精度是影响其性能的关键指标之一。
通过优化伺服系统参数,提高伺服系统的控制精度,使用高精度位置环和伺服电机等方法,可以有效地提高伺服系统的定位精度,从而满足实际工程需求。
交流伺服电机和直流伺服电机是现代工业中常见的两种电机类型,它们在自动化设备、机械加工、医疗设备等领域有着广泛的应用。
本文将从优缺点和应用场景两方面对这两种电机进行比较分析,帮助读者更好地了解它们的特点和适用范围。
一、交流伺服电机的优缺点及应用场景1. 优点交流伺服电机具有转矩稳定、响应速度快、运行平稳等优点。
其控制系统采用了先进的矢量控制技术,能够实现高精度的位置控制和速度控制,适用于对动态性能要求较高的场合。
交流伺服电机结构简单,维护成本低,使用寿命长,能够适应高负载、高速度、高精度的工作要求。
2. 缺点交流伺服电机的购物成本较高,控制系统复杂,需要专业的技术人员进行调试和维护。
对于一些需要频繁启停和低速运行的场合,交流伺服电机的功耗较大,效率相对较低。
3. 应用场景交流伺服电机广泛应用于数控机床、机器人、包装设备、纺织机械等需要高精度、高速度控制的设备中。
在工业自动化领域,交流伺服电机能够实现精准的定位和快速的响应,提高了生产效率和产品质量。
二、直流伺服电机的优缺点及应用场景1. 优点直流伺服电机具有启动扭矩大、速度调节范围广、功率密度高、调节精度高等优点。
它的控制系统简单,响应速度快,能够实现高速度和高精度的位置控制,适用于对动态性能要求较高的应用场景。
直流伺服电机的效率较高,能够节能降耗,提升设备的整体性能。
2. 缺点直流伺服电机的换向器易受损,需要定期更换,维护成本较高。
由于其换向器结构复杂,使用寿命相对较短,需要定期维护和检修。
3. 应用场景直流伺服电机广泛应用于飞行器、印刷机、纺织设备、医疗器械等需要高速度、高精度控制的领域。
在航空航天领域,直流伺服电机能够实现飞行器的精确定位和灵活操作,保证了飞行安全和飞行质量。
三、结论交流伺服电机和直流伺服电机各有其优势和劣势,应根据具体的应用场景和要求进行选择。
在需要高精度、高速度控制的场合,交流伺服电机具有较大的优势,能够满足精密加工和自动化生产的要求。