中南大学 机械原理 习题 (5)
- 格式:ppt
- 大小:733.00 KB
- 文档页数:25

第1章 平面机构的结构分析1.1 解释下列概念1.运动副;2.机构自由度;3.机构运动简图;4.机构结构分析;5.高副低代。
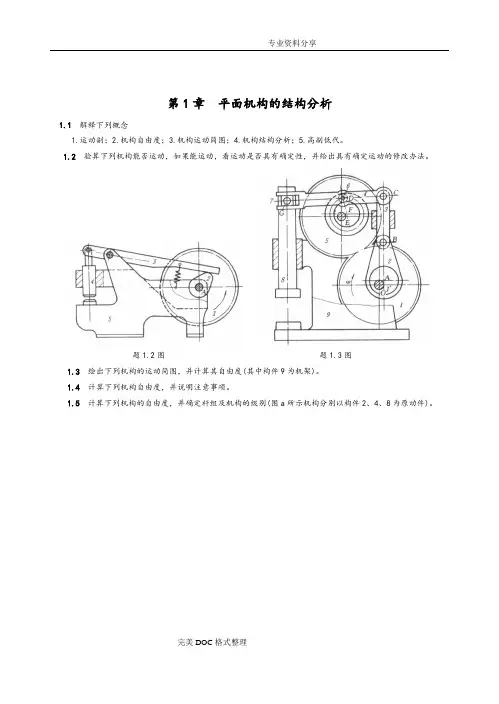
1.2 验算下列机构能否运动,如果能运动,看运动是否具有确定性,并给出具有确定运动的修改办法。
题1.2图 题1.3图1.3 绘出下列机构的运动简图,并计算其自由度(其中构件9为机架)。
1.4 计算下列机构自由度,并说明注意事项。
1.5 计算下列机构的自由度,并确定杆组及机构的级别(图a 所示机构分别以构件2、4、8为原动件)。
题1.4图题1.5图第2章 平面机构的运动分析2.1 试求图示各机构在图示位置时全部瞬心。
题2.1图2.2 在图示机构中,已知各构件尺寸为l AB =180mm , l BC =280mm , l BD =450mm , l CD =250mm , l AE =120mm , φ=30o, 构件AB 上点E 的速度为 v E =150 mm /s ,试求该位置时C 、D 两点的速度及连杆2的角速度ω2 。
2.3 在图示的摆动导杆机构中,已知l AB =30mm , l AC =100mm , l BD =50mm , l DE =40mm ,φ1=45o,曲柄1以等角速度ω1=10 rad/s 沿逆时针方向回转。
求D 点和E 点的速度和加速度及构件3的角速度和角加速度(用相对运动图解法)。
题2.2图题2.3图2.4 在图示机构中,已知l AB =50mm , l BC =200mm , x D=120mm , 原动件的位置φ1=30o, 角速度ω1=10 rad/s ,角加速度α1=0,试求机构在该位置时构件5的速度和加速度,以及构件2的角速度和角加速度。
题2.4图2.5 图示为机构的运动简图及相应的速度图和加速度图。
(1)在图示的速度、加速度多边形中注明各矢量所表示的相应的速度、加速度矢量。
(2)以给出的速度和加速度矢量为已知条件,用相对运动矢量法写出求构件上D 点的速度和加速度矢量方程。
模拟试题八(机械原理A)一、判断题(10分)[对者画√,错者画×]1、对心曲柄滑块机构都具有急回特性。
()2、渐开线直齿圆柱齿轮的分度圆与节圆相等。
()3、当两直齿圆柱齿轮的安装中心距大于标准中心距时,为保证无侧隙啮合,应采用正传动。
()4、凸轮机构中当从动件的速度有有限量突变时,存在柔性冲击。
()5、用飞轮调节周期性速度波动时,可将机械的速度波动调为零。
()6、动平衡的转子一定满足静平衡条件。
()7、斜齿圆柱齿轮的法面压力角大于端面压力角。
()8、加工负变位齿轮时,齿条刀具的分度线应向远离轮坯的方向移动。
( )9、在铰链四杆机构中,固定最短杆的邻边可得曲柄摇杆机构。
()10、平底直动从动件盘状凸轮机构的压力角为常数。
()二、填空题(10分)1、机构具有确定运动的条件为________________________。
2、平面八杆机构共有_________瞬心。
3、渐开线齿廓上最大压力角在________圆上。
4、当行程速比系数K=1.5时,机构的极位夹角θ=__________。
5、举出两种可实现间歇运动的机构。
________________________。
6、偏置滚子(尖顶)直动从动件盘状凸轮机构的压力角表达式tgα=______。
7、渐开线齿轮的齿廓形状与哪些参数有关?_____________。
8、机械中安装飞轮的目的是_____________。
9、直齿圆锥齿轮的当量齿数Zv=__________。
10、在连杆机构中处于死点位置的γ=__________;α=__________。
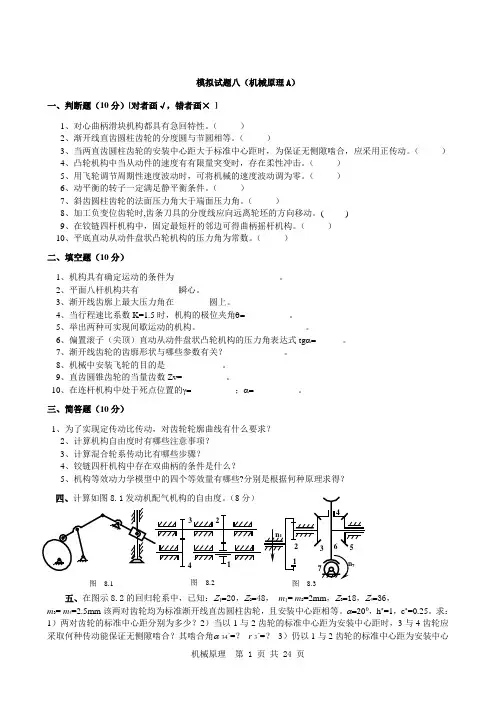
三、简答题(10分)1、为了实现定传动比传动,对齿轮轮廓曲线有什么要求?2、计算机构自由度时有哪些注意事项?3、计算混合轮系传动比有哪些步骤?4、铰链四杆机构中存在双曲柄的条件是什么?5、机构等效动力学模型中的四个等效量有哪些?分别是根据何种原理求得?四、计算如图8.1发动机配气机构的自由度。
(8分)图8.1图8.2五、在图示8.2的回归轮系中,已知:Z1=20,Z2=48,m1= m2=2mm,Z3=18,Z4=36,m3= m4=2.5mm该两对齿轮均为标准渐开线直齿圆柱齿轮,且安装中心距相等。
一. 单选题(共20题,共80分)1. 设计凸轮机构时,()运动规律存在刚性冲击。
(4分)A.简谐B.等速C.正弦加速度★标准答案:B☆考生答案:★考生得分:0 分评语:2. 若铰链四杆机构满足杆长条件,使机构成为双摇杆机构,则()。
(4分)A.固定最短杆B.固定最长杆C.固定最短杆的对边★标准答案:C☆考生答案:★考生得分:0 分评语:3. 在尖顶推杆盘型凸轮机构中,若将原来的尖顶推杆换成滚子推杆,则()。
(4分)A.推杆的运动发生改变B.推杆的运动不变C.凸轮磨损加剧★标准答案:B☆考生答案:★考生得分:0 分评语:4. 曲柄为原动件的偏置曲柄滑块机构,当滑块的传动角最小时,则()。
(4分)A.曲柄与导路平行B.曲柄与导路垂直C.曲柄与连杆垂直★标准答案:B☆考生答案:★考生得分:0 分评语:5. 曲柄滑块机构的行程速比系数为()。
(4分)A.B.或C.★标准答案:B☆考生答案:★考生得分:0 分评语:6. 偏心轮机构是这样由铰链四杆机构演化而来的()。
(4分)A.扩大转动副B.取不同的构件为机架C.化转动副为移动副★标准答案:A☆考生答案:★考生得分:0 分评语:7. 以对心曲柄滑块机构的曲柄为机架时,得到的是()。
(4分)A.导杆机构B.摇块机构C.直动滑杆机构★标准答案:A☆考生答案:★考生得分:0 分评语:8. 下面那种情况下,存在死点()。
(4分)A.对心曲柄滑块机构,曲柄主动B.曲柄摇杆机构,曲柄主动C.曲柄摇杆机构,摇杆主动★标准答案:C☆考生答案:★考生得分:0 分评语:9. 机构的最小传动角可能发生在()位置之处。
(4分)A.主动曲柄与连杆二次共线B.主动曲柄与机架二次共线C.主动曲柄与摇杆二次共线★标准答案:B☆考生答案:★考生得分:0 分评语:10. 四杆机构处于死点时,其传动角为()。
(4分)A.B.★标准答案:A☆考生答案:★考生得分:0 分评语:11. 平面连杆机构的行程速比系数K可能的取值范围()。

中南大学现代远程教育课程考试复习题及参考答案机械原理一、填空题:1.机构具有确定运动的条件是机构的自由度数等于原动件数目。
2.同一构件上各点的速度多边形必相似于于对应点位置组成的多边形。
3.在转子平衡问题中,偏心质量产生的惯性力可以用相对地表示。
4.机械系统的等效力学模型是具有,其上作用有的等效构件。
5.无急回运动的曲柄摇杆机构,极位夹角等于,行程速比系数等于。
6.平面连杆机构中,同一位置的传动角与压力角之和等于。
7.一个曲柄摇杆机构,极位夹角等于36º,则行程速比系数等于。
8.为减小凸轮机构的压力角,应该凸轮的基圆半径。
9.凸轮推杆按等加速等减速规律运动时,在运动阶段的前半程作运动,后半程作运动。
10.增大模数,齿轮传动的重合度;增多齿数,齿轮传动的重合度。
11.平行轴齿轮传动中,外啮合的两齿轮转向相,内啮合的两齿轮转向相。
12.轮系运转时,如果各齿轮轴线的位置相对于机架都不改变,这种轮系是轮系。
13.三个彼此作平面运动的构件共有个速度瞬心,且位于。
14.铰链四杆机构中传动角γ为,传动效率最大。
15.连杆是不直接和相联的构件;平面连杆机构中的运动副均为。
16.偏心轮机构是通过由铰链四杆机构演化而来的。
17.机械发生自锁时,其机械效率。
18.刚性转子的动平衡的条件是。
19.曲柄摇杆机构中的最小传动角出现在与两次共线的位置时。
20.具有急回特性的曲杆摇杆机构行程速比系数k 1。
21.四杆机构的压力角和传动角互为,压力角越大,其传力性能越。
22.一个齿数为Z,分度圆螺旋角为β的斜齿圆柱齿轮,其当量齿数为。
23.设计蜗杆传动时蜗杆的分度圆直径必须取值,且与其相匹配。
24.差动轮系是机构自由度等于的周转轮系。
25.平面低副具有2个约束, 1 个自由度。
26.两构件组成移动副,则它们的瞬心位置在。
27.机械的效率公式为,当机械发生自锁时其效率为。
28.标准直齿轮经过正变位后模数,齿厚。
29.曲柄摇杆机构出现死点,是以作主动件,此时机构的角等于零。
机械原理试题及答案1.在如图所示的齿轮—凸轮轴系中,轴4 称为 ()A.零件B. 机构C. 构件D. 部件2.若组成运动副的两构件间的相对运动是移动,则称这种运动副为()A. 转动副B. 移动副C. 球面副D. 螺旋副3.渐开线齿轮的齿廓曲线形状取决于()A. 分度圆B. 齿顶圆C. 齿根圆D. 基圆4.机构具有确定相对运动的条件是()A.机构的自由度数目等于主动件数目B.机构的自由度数目大于主动件数目C.机构的自由度数目小于主动件数目D.机构的自由度数目大于等于主动件数目5.一般转速的滚动轴承计算准则为()A. 进行静强度计算B. 进行极限转速计算C. 进行疲劳寿命计算D. 进行热平衡计算6.柴油机曲轴中部的轴承应采用()A. 整体式滑动轴承B. 部分式滑动轴承C. 深沟球轴承D. 圆锥滚子轴承7.螺纹联接的自锁条件为()A. 螺纹升角≤当量摩擦角B. 螺纹升角 > 摩擦角C. 螺纹升角≥摩擦角D. 螺纹升角≥当量摩擦角8.机械运转不均匀系数是用来描述机械运转不均匀程度的重要参数,其表达式为()A. B.C. D.9.铰链四杆机构的死点位置发生在()A. 从动件与连杆共线位置B. 从动件与机架共线位置C. 主动件与连杆共线位置D. 主动件与机架共线位置10. 当轴的转速较低,且只承受较大的径向载荷时,宜选用()A. 深沟球轴承B. 推力球轴承C. 圆柱滚子轴承D. 圆锥滚子轴承11.作单向运转的转轴,其弯曲应力的变化特征是()A. 对称循环B. 脉动循环C. 恒定不变D. 非对称循环12. 在一般机械传动中,若需要采用带传动时,应优先选用()A. 圆型带传动B. 同步带传动C.V 型带传动D. 平型带传动13.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,则为了获得曲柄摇杆机构,其机架应取()A. 最短杆B. 最短杆的相邻杆C. 最短杆的相对杆D. 任何一杆14. 若被联接件之一厚度较大、材料较软、强度较低、需要经常装拆时,宜采用()A. 螺栓联接B. 双头螺柱联接C. 螺钉联接D. 紧定螺钉联接15. 在凸轮机构的从动件选用等速运动规律时,其从动件的运动()A. 将产生刚性冲击B. 将产生柔性冲击C. 没有冲击D. 既有刚性冲击又有柔性冲击16. 与标准直齿圆柱齿轮的复合齿轮形系数YFS 值有关的参数是()A. 工作齿宽bB. 模数 mC. 齿数 zD. 压力角α17. 齿轮传动中,轮齿齿面的疲劳点蚀经常发生在()A. 齿根部分B. 靠近节线处的齿根部分C. 齿顶部分D. 靠近节线处的齿顶部分18. 普通圆柱蜗杆传动的正确啮合条件是()A.mt1=ma2,αt1=αa2,γ=βB.ma1=mt2,αa1=αt2,γ=βC.mt1=ma2,αt1=αa2,γ=-βD.ma1=ma2,αa1=αt2,γ=-β(注:下标t 表示端面, a 表示轴向, 1 表示蜗杆、 2表示蜗轮)19. 下列联轴器中,能补偿两轴的相对位移并可缓冲、吸振的是()A. 凸缘联轴器B. 齿式联轴器C. 万向联轴器D. 弹性柱销联轴器20. 带传动的主要失效形式是带的()A. 疲劳拉断和打滑B. 磨损和胶合C. 胶合和打滑D. 磨损和疲劳点蚀二、填空题 (本大题共 10 小题,每小题 1 分,共 10 分 )21. 在机构中采用虚约束的目的是为了改善机构的运动状况和________ 。
机械原理模拟试卷(一)一、选择题(每题2分,共20分)1. 两个运动构件间相对瞬心的绝对速度。
(①均为零②不相等③不为零且相等)2. 机构具有确定运动的条件是原动件数目等于的数目。
(①从动件②机构自由度③运动副)3. 若标准齿轮与正变位齿轮的参数m,Z,α,h a*均相同,则后者比前者的:齿根高,分度圆直径,分度圆齿厚,周节。
(①增大②减小③不变)4.在高速凸轮机构中,为减少冲击与振动,从动件运动规律最好选用运动规律。
(①等速②等加等减速③余弦加速度④正弦加速度)5. 静平衡的转子是动平衡的;动平衡的转子是静平衡的。
(①一定②不一定③一定不)6. 机械系统在考虑摩擦的情况下,克服相同生产阻力时,其实际驱动力P与理想驱动力P0的关系是:P P0。
(①小于②等于③大于④大于等于)7.差动轮系是指自由度。
(①为1的周转轮系②为2的定轴轮系③为2的周转轮系)8. 设计标准齿轮时,若发现重合度小于1,则修改设计时应。
(①加大模数②增加齿数③加大中心距)9. 曲柄滑块机构若存在死点时,其主动件必须是,在此位置与共线。
(①曲柄②连杆③滑块)10. 周转轮系的传动比计算应用了转化机构的概念。
对应周转轮系的转化机构乃是。
(①定轴轮系②行星轮系③混合轮系④差动轮系)二、简答题(每题5分,共25分)1. 计算图示机构自由度,若有复合铰链、局部自由度及虚约束需指出。
2. 图示楔块机构,已知:P 为驱动力,Q 为生产阻力,f 为各接触平面间的滑动摩擦系数,试作:(1) 摩擦角的计算公式ϕ= ;(2) 在图中画出楔块2的两个摩擦面上所受到的全反力R 12, R 32两个矢量。
3. 试在图上标出铰链四杆机构图示位置压力角α和传动角γ。
4. 如图所示,薄壁上有不平衡重Q 1=10N 、Q 2=20N ,所在半径分别为:r 1=200mm ,r 2=100mm 。
试求:1) 在r =100mm 半径的圆上,应加配重Q=? 2) 配重Q 的方位与OX 轴之间的夹角α=?5. 试标注出在图示位置时机构中瞬心P 12、P 23、P 14、P 34、P 24的位置。
第1章平面机构的结构分析1.1解释下列概念1.运动副;2.机构自由度;3.机构运动简图;4.机构结构分析;5.高副低代。
1.2验算下列机构能否运动,如果能运动,看运动是否具有确定性,并给出具有确定运动的修改办法。
题1.2图题1.3图1.3 绘出下列机构的运动简图,并计算其自由度(其中构件9为机架)。
1.4 计算下列机构自由度,并说明注意事项。
1.5计算下列机构的自由度,并确定杆组及机构的级别(图a所示机构分别以构件2、4、8为原动件)。
题1.4图题1.5图第2章平面机构的运动分析2.1试求图示各机构在图示位置时全部瞬心。
题2.1图2.2在图示机构中,已知各构件尺寸为l AB=180mm , l BC=280mm , l BD=450mm ,l CD=250mm ,l AE=120mm ,φ=30º, 构件AB上点E的速度为v E=150 mm /s ,试求该位置时C、D两点的速度及连杆2的角速度ω2。
2.3 在图示的摆动导杆机构中,已知l AB=30mm , l AC=100mm , l BD=50mm ,l DE=40mm ,φ1=45º,曲柄1以等角速度ω1=10 rad/s沿逆时针方向回转。
求D点和E点的速度和加速度及构件3的角速度和角加速度(用相对运动图解法)。
题2.2图题2.3图2.4 在图示机构中,已知l AB =50mm , l BC =200mm , x D =120mm , 原动件的位置φ1=30º, 角速度ω1=10 rad/s ,角加速度α1=0,试求机构在该位置时构件5的速度和加速度,以及构件2的角速度和角加速度。
题2.4图2.5 图示为机构的运动简图及相应的速度图和加速度图。
(1)在图示的速度、加速度多边形中注明各矢量所表示的相应的速度、加速度矢量。
(2)以给出的速度和加速度矢量为已知条件,用相对运动矢量法写出求构件上D 点的速度和加速度矢量方程。
机械原理习题及答案 Prepared on 22 November 2020第二章 平面机构的结构分析 2-1 绘制图示机构的运动简图。
2-3 计算图示机构的自由度,并指出复合铰链、局部自由度和虚约束。
解:(a) C 处为复合铰链。
7,n =p h =0,p l =10。
自由度 323721001W l h F n p p =--=⨯-⨯-=。
(b) B 处为局部自由度,应消除。
3n =, p h =2,p l =2自由度 323323121W l h F n p p =--=⨯-⨯-⨯=。
(c) B 、D 处为局部自由度,应消除。
3n =, p h =2,p l =2。
自由度 323323121W l h F n p p =--=⨯-⨯-⨯=。
(d) CH 或DG 、J 处为虚约束,B 处为局部自由度,应消除。
6n =,p h =1,p l =8。
自由度 32362811W l h F n p p =--=⨯-⨯-=。
(e) 由于采用对称结构,其中一边的双联齿轮构成虚约束,在连接的轴颈处,外壳与支架处的连接构成一个虚约束转动副,双联齿轮与外壳一边构成虚约束。
其中的一边为复合铰链。
其中4n =,p h =2,p l =4。
自由度 32342422W l h F n p p =--=⨯-⨯-=。
(f) 其中,8n =,p h =0,p l =11。
自由度 323821102W l h F n p p =--=⨯-⨯-=。
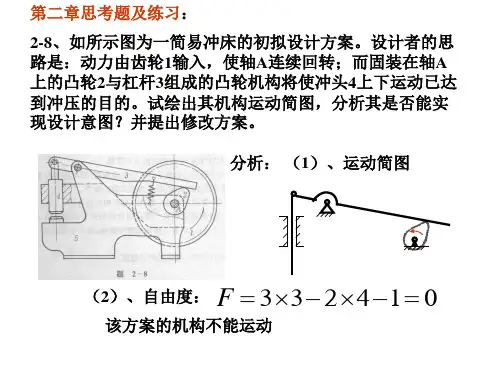
(g) ① 当未刹车时,6n =,p h =0,p l =8,刹车机构自由度为② 当闸瓦之一刹紧车轮时,5n =,p h =0,p l =7,刹车机构自由度为③ 当两个闸瓦同时刹紧车轮时,4n =,p h =0,p l =6,刹车机构自由度为2-3 判断图示机构是否有确定的运动,若否,提出修改方案。
分析 (a) 要分析其运动是否实现设计意图,就要计算机构自由度,不难求出该机构自由度为零,即机构不能动。