单站无源定位中角度变化率的测量方法研究
- 格式:pdf
- 大小:280.29 KB
- 文档页数:4
基于相位差的机载单站无源定位算法
田明辉;马敏
【期刊名称】《太赫兹科学与电子信息学报》
【年(卷),期】2016(014)002
【摘要】机载无源定位是电子侦察中的一项重要任务.针对实际工程特点,提出了一种鲁棒的基于相位差测量的机载单站无源定位算法.通过测量目标信号的方位角和相位差,利用卡尔曼滤波模型计算相位差变化率并对目标进行测距定位,最后将多次的定位结果进行交互多模滤波融合,实现对目标的高精确度定位.给出了计算相位差变化率的滤波模型、目标定位算法,以及交互多模滤波的融合定位过程.仿真实验中采用STK仿真软件生成机载平台的位置数据和目标信号入射方位角及相位差数据,分析了目标定位的效果及性能.最后给出了一些工程实践性的建议,具有一定的工程参考意义.
【总页数】5页(P190-194)
【作者】田明辉;马敏
【作者单位】中国电子科技集团公司第38研究所,安徽合肥 230088;中国电子科技集团公司第38研究所,安徽合肥 230088
【正文语种】中文
【中图分类】TN973
【相关文献】
1.基于抗差EKF的机载单站无源定位算法 [J], 张艺航;陈树新;吴昊;张衡阳
2.一种利用相位差变化率的机载单站无源定位方法 [J], 李望西;黄长强;王勇;王治军
3.基于相位差的机载单站无源定位算法 [J], 田明辉;马敏;
4.LMS预处理的相位差机载单站无源定位方法 [J], 邢怀玺; 吴华; 陈游
5.基于相位差变化率的单站无源定位算法研究 [J], 刘洋; 罗正华; 曾宇; 廖钧华; 张兴虎
因版权原因,仅展示原文概要,查看原文内容请购买。
基于相位差变化率的单站无源定位技术
刘永辉;窦修全
【期刊名称】《无线电工程》
【年(卷),期】2010(40)6
【摘要】提出以相位差变化率为观测量,UKF逐步逼近目标位置的定位算法,有效解决了单站无源定位中收敛速度和定位精度问题.该算法以相位差变化率为观测量,消除了由于相位差中存在固定偏差对定位精度影响,提高了定位精度.而引进的UKF滤波算法则省去对观测方程的雅各比矩阵计算,简化滤波了运算,使定位过程更容易实现,从而提高定位滤波运算速度.
【总页数】3页(P48-50)
【作者】刘永辉;窦修全
【作者单位】中国电子科技集团公司第五十四研究所,河北,石家庄,050081;中国电子科技集团公司第五十四研究所,河北,石家庄,050081
【正文语种】中文
【中图分类】TN966.2
【相关文献】
1.基于相位差变化率方法的单站无源定位技术 [J], 单月晖;孙仲康;皇甫堪
2.单站无源定位中相位差变化率的高精度提取 [J], 侯建民;靳学明;齐美彬
3.单站无源定位中相位差变化率的测量方法研究 [J], 杨晶;夏韶俊;吴伟
4.基于相位差变化率单站无源定位及其试验方法研究 [J], 张政超;李文臣;袁翔宇;陈杨;李宏
5.基于相位差变化率的单站无源定位算法研究 [J], 刘洋; 罗正华; 曾宇; 廖钧华; 张兴虎
因版权原因,仅展示原文概要,查看原文内容请购买。
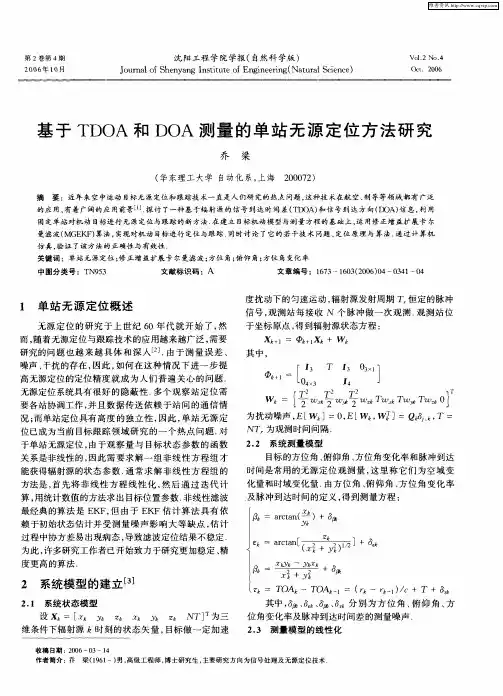
基于角度和多普勒频率信息的动福射源的无源定位研究乔梁【摘要】Passive location is being paid more and more attention in the electronic warfare(EW) field. The algorithm for passive location of maneuvering target by single station is discussed using the direction angle of arrival and Doppler frequency of the emitter. This algorithm takes full advantage of the spatial and frequency domain changing information of the measurements from the emitter. Some concerned issues, such as technical problems, principle and algorithm are discussed. With the help of computer simulation, the method is proved to be correct and effective.%在电子对抗领域中,无源定位已经得到人们的高度重视.本文探讨了一种利用辐射源信号到达方向角度信息和多普勒频率信息,实现固定单站对机动目标进行无源定位与跟踪的新方法.该方法充分利用了辐射源信号测量值的空域和频域变化量信息.本文讨论了它的若干技术问题、定位原理与算法.通过计算机仿真,验证了该方法的正确性与有效性.【期刊名称】《三峡大学学报(自然科学版)》【年(卷),期】2011(033)006【总页数】3页(P76-78)【关键词】无源定位与跟踪;定位算法;角度及其变化率;多普勒频率【作者】乔梁【作者单位】广东金融学院计算机系,广州 510520【正文语种】中文【中图分类】TN953单站无源定位技术因为具有隐蔽性和具有高度的独立性等特点而受到重视[1-4],并且在现代电子战和无线通信系统中都有广泛应用.传统的只测角单站无源定位技术只利用了目标的角度信息.这种方法的跟踪收敛速度慢、精度低,而且要求观测平台有一定的机动飞行,这为该技术的应用带来诸多的不便.因此研究增加辅助信息实现对运动目标的快速、无机动定位成为单站无源定位领域的发展趋势.这些辅助信息中包括目标辐射源信号的空域变化率信息(角度变化率)和频域变化率信息(多普勒频率及其变化率).研究结果表明增加角度变化率信息和多普勒频率及其变化率信息可以克服传统的只测角单站无源定位的缺点,更好地实现对运动辐射源的定位与跟踪.1 系统方程的建立1.1 系统状态方程假设辐射源辐射等周期(周期Tr恒定)的脉冲信号,观测站每接收N个脉冲做一次观测,则T=NTr为采样间隔.设Xk=1/fT]为三维条件下辐射源k时刻状态矢量,目标作一定加速度扰动下的匀速运动,观测站位于坐标原点,得到辐射源状态方程为式中,fT为目标辐射信号载频.1.2 系统测量方程由于多普勒效应,观测站得到的辐射源频率中包含了多普勒频率fdk.即三维情况下fdk的表达式为式中,vrk为k时刻目标相对于观测站的径向速度.另外,对上式两边求导得对上式化简并考虑到目标距离很远时,通常不会有大的机动,所以可以考虑目标作匀速运动,所以:目标的方位角、俯仰角、方位角变化率、俯仰角变化率和多普勒频率及其变化率是常用的无源定位观测量,在这里我们称它们为空域变化量和频域变化量.由方位角、俯仰角、方位角变化率、俯仰角变化率的定义,得到测量方程:其中,分别为方位角、俯仰角、方位角变化率、俯仰角变化率、多普勒频率及多普勒频率变化率的测量噪声将上式写成矩阵形式为式中,Zk为测量矩阵;f(Xk)为状态矢量的实值向量函数;Vk为测量噪声,其协方差矩阵为Rk=E[].1.3 测量方程的线性化因上面的方程都是非线性的,需对其进行线性化处理.以俯仰角表达式为例,将其在预测点k/k-1处进行Taylor级数展开并取一次项,可以近似得出用同样方法可以对其它表达式进行线性化处理.经过上述分析,我们建立了测量量与目标状态之间的关系,应用修正增益的扩展卡尔曼滤波算法就可以实时得到目标状态的滤波估计值,从而实现对目标的定位跟踪.2 定位算法分析无源定位通常都是非线性问题,而对非线性滤波最经典的算法是扩展卡尔曼滤波[5-8].但是因为EKF算法存在协方差容易出现病态,以及对初始状态假定精度敏感等缺点,所以一些学者提出了MGEKF(修正增益的扩展卡尔曼滤波)算法.MGEKF滤波方法在大量实践中被证明是一种对非线性系统较好的滤波算法. MGEKF算法如下:(1)计算预测方程:(2)计算预测协方差:(3)计算 Kalman增益(4)计算滤波方程:(5)计算估计误差的协方差:由前面分析可知,这些量均为已知.3 计算机仿真仿真条件:辐射源频率10GH z,定位算法采用MGEKF滤波算法.运动状态:=[120km 100km 8km-300m/s 100m/s 2m/s]T.观测站位于坐标原点,观测量包括和=σε=5mrad,σ˙β=0.2mrad/s,σ˙ε=0.2mrad/s,σf=0.5kHz,σ˙f d=1Hz/s.仿真中分别采用测量子集{β,ε,fd}、{}和{β,ε,}.上述子集分别表示为子集1、子集2和子集3.从图1仿真结果可以得到以下结论:通过测量频域和空域参数可以实现无机动单站对运动辐射源的无源定位跟踪,且定位误差可以收敛到很小.加入角度变化率和多普勒频率变化信息后,利用测量子集2和3的定位结果,其性能要优于子集1.图1 相对位置误差曲线4 结语实现对辐射源的单站无源定位具有非常重要的意义.本文主要讨论了单站无源定位与跟踪,并提出了一种改进的无源定位与跟踪算法.该算法不仅克服了传统的卡尔曼算法的不足,而且计算比较简单,实现容易,具有很强的实用性.经过一定次数的迭代滤波,在较短的时间内可将定位误差减到几百米以内.理论分析和仿真结果表明,通过测量频域和空域参数可以实现无机动单站对运动辐射源的无源定位跟踪,而且定位误差可以收敛到很小.这种方法使单站被动定位跟踪技术的研究走上了新台阶,拓宽了应用范围.尽管本文的方法还存在着一定的局限性,但仍不失为一种好的定位手段.参考文献:[1]郭广寒,王志刚.一种改进的粒子群算法[J].哈尔滨理工大学学报,2010,12(2):31-34.[2]冯道旺,李宗华.一种单站无源定位方法及其可观测性分析[J].国防科技大学学报,2004(1):68-71.[3]满春涛,盛桂敏.改进的协同粒子群优化算法[J].哈尔滨理工大学学报,2010,15(5):51-53.[4]罗景青,刘文山,俞志富.对运动辐射源的单站无源定位技术研究[J].解放军电子工程学院学报,2000(2):9-11.[5]李群力,傅妍芳.基于Kalman滤波的数据融合研究[J].计算机仿真,2007,24(8):299-302.[6]郭艳丽,杨绍全.差分多普勒无源定位[J].电子对抗技术,2002,17(6):20-23.[7]王鼎,曲阜平,吴瑛.一种基于空域和频域信息的固定单站无源定位跟踪改进算法[J].电子与信息学报,2007,29(12):2891-2895.[8]汪语哲,史小平,朱胤.抑制闪烁噪声的SMM-IUKF目标跟踪算法[J].哈尔滨理工大学学报,2010,15(5):69-74.。
DOI:10.3969/j.issn.1672 2337.2014.03.012慢速目标仅测角无源定位算法研究张凯1,刘洋2(1.海军92941部队93分队,辽宁葫芦岛125001;2.国防科技大学电子科学与工程学院,湖南长沙410073) 摘 要:为解决反辐射导弹对慢速运动目标定位精度的难点问题,建立了慢速目标的定位模型,推导了静止目标定位误差的克拉美罗下限(CRLB)。
将仅测角条件下无机动单站对运动辐射源的不可观测问题转化为模型误差问题,从而实现对慢速目标仅测角无源定位。
针对传统扩展卡尔曼滤波(EKF)算法定位精度低,过于依赖初始化条件的缺点,提出了基于距离角度划分的网格搜索法(RA GBF)。
该方法在降低传统的GBF方法的计算量同时,定位性能优于EKF算法。
仿真实验证明了方法的有效性。
关键词:慢速目标;无源定位;仅测角;网格搜索法中图分类号:TN958;TN957 文献标志码:A 文章编号:1672 2337(2014)03 0291 06ResearchonaPassiveBearing OnlyLocationAlgorithmBasedonSlowMovingTargetZHANGKai1,LIUYang2(1.Unit92941ofPLA,Huludao125001,China;2.CollegeofElectronicScienceandEngineering,NationalUniversityofDefenseTechnology,Changsha410073,China) Abstract:Inordertosolvetheproblemoflocatingaccuracyofslowmovingtargetinantiradiationmis sile(ARM),thelocalizationmodelbasedonslowmovingtargetisbuiltinthispaper.ThentheCramer Raolowerbound(CRLB)ofstationarytargetisderived.Undertheconditionofbearing onlymeasurement,theunobservedproblemofmovingemitterilluminationcanbeexpressedasamodelingerrorbyafixedobserver,thusthebearing onlylocationofslowmovingtargetisrealized.Amingatlowpositionaccuracyandinitializa tiondependenceoflocalizationmodelintranslationalEKFalgorithm,arange anglegridbasedfilter(RA GBF)algorithmbasedondistance angleisproposed.ThecomputationalcomplexityisgreatlyreducedandthegeolocationperformanceismuchbetterthanthatoftheEKFalgorithm.Simulationresultsverifytheva lidityofthenewapproach.Keywords:slowmovingtarget;passivelocation;bearing only;gridbasedfilter(GBF)0 引言 相对雷达等有源探测手段,无源定位系统具有不发射电磁信号、生存能力强及作用距离远等显著优点[1]。
第14卷 第2期太赫兹科学与电子信息学报Vo1.14,No.2 2016年4月 Journal of Terahertz Science and Electronic Information Technology Apr.,2016 文章编号:2095-4980(2016)02-0190-05基于相位差的机载单站无源定位算法田明辉,马敏(中国电子科技集团公司第38研究所,安徽合肥 230088)摘 要:机载无源定位是电子侦察中的一项重要任务。
针对实际工程特点,提出了一种鲁棒的基于相位差测量的机载单站无源定位算法。
通过测量目标信号的方位角和相位差,利用卡尔曼滤波模型计算相位差变化率并对目标进行测距定位,最后将多次的定位结果进行交互多模滤波融合,实现对目标的高精确度定位。
给出了计算相位差变化率的滤波模型、目标定位算法,以及交互多模滤波的融合定位过程。
仿真实验中采用STK仿真软件生成机载平台的位置数据和目标信号入射方位角及相位差数据,分析了目标定位的效果及性能。
最后给出了一些工程实践性的建议,具有一定的工程参考意义。
关键词:相位差;机载;无源定位;交互多模滤波中图分类号:TN973文献标识码:A doi:10.11805/TKYDA201602.0190An algorithm research for air-borne single observer passive locating based onphase differenceTIAN Minghui,MA Min(No. 38 Research Institute,China Electronics Technology Group Corporation,Hefei Anhui 230088,China)Abstract:Single observer passive locating is an important task for air reconnaissance. A robust algorithm for air-borne single observer passive locating based on phase difference is proposed in thispaper. The target location can be worked out by using the Kalman filter model based on the azimuth angleof target signal and the phase changing difference at the same time. The Kalman filter model forcalculating the phase difference rate of change is presented. And the Interaction Multiple Model(IMM)filter model is also given for raising the precision of target locating algorithm. In the experiment, the STKsoftware is utilized for generating the platform position data, the signal azimuth data and the phasechanging difference. In addition, the target locating result and the performance are also analyzed. Finally,several constructive suggestions are made for practical engineering applications.Key words:phase difference;air-borne;passive locating;Interaction Multiple Model(IMM) filter无源定位技术是电子侦察中的一项重要技术,其具有作用距离远、隐蔽接收、不易被对方发觉的优点,对于提高系统在电子战环境下的生存和作战能力有着重要的作用[1–2]。
基于相位差变化率的无源定位技术研究高义;高元锋【摘要】基于单站无源定位技术研究基础,对相位差变化率定位原理进行了简要介绍,针对相位差变化率定位过程中相位模糊、定位时间长和定位精度低等问题,提出了一种基于MGEKF滤波算法的相位差变化率单站无源定位方法,该方法采用了相位差参数预处理和MGEKF定位滤波算法.经过仿真分析和外场试验验证表明:采用MGEKF定位滤波处理的相位差变化率无源定位方法,可以使单站定位速度和定位精度比传统的只测角定位法提高很多.【期刊名称】《无线电工程》【年(卷),期】2013(043)001【总页数】4页(P52-55)【关键词】相位差变化率定位;EKF;MGEKF;无源定位【作者】高义;高元锋【作者单位】中国电子科技集团公司第五十四研究所,河北石家庄050081;中国电子科技集团公司第五十四研究所,河北石家庄050081【正文语种】中文【中图分类】TN953+.70 引言目前,单站无源定位技术在电子战领域得到迅速发展。
与有源定位技术相比,利用无源定位设备可在电磁静默的条件下工作,具有更好的隐蔽性,大大提高了定位跟踪系统在电子战环境下的生存能力;与多站无源定位系统相比,单站无源定位系统一般不需要多站同步工作和数据传输,具有高度的独立性和较大的灵活性,且成本相对较低。
在单站无源定位中,当辐射源目标和观测平台之间存在相对运动时,可以利用信号的到达方向和相位变化率来实现目标定位。
这种基于相位差变化率的无源定位技术与传统测向交会定位技术相比,增加了相位差变化率观测量,解决了测向交会需要较大交会角、定位时间长等问题。
1 相位差变化率定位原理相位差变化率定位基本工作原理是利用观测平台上携载的二单元天线阵(干涉仪),接收目标辐射电磁波的相位差及其变化率信息对目标进行定位,通过观测到的相位差及其变化率,求出目标的方位角和俯仰角的时间变化率,进而解算出径向距离,从而实现对目标的无源定位。
二阵元天线相位差变化率及定位几何模型如图1和图2所示。
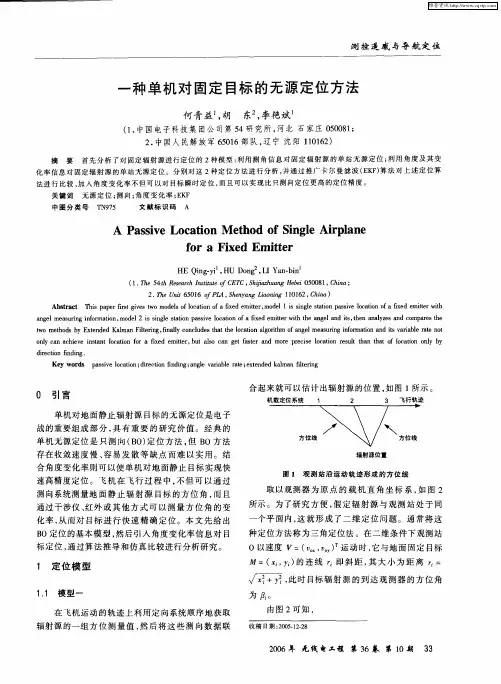
一种单机对固定目标的无源定位方法
何青益;胡东;李艳斌
【期刊名称】《无线电工程》
【年(卷),期】2006(036)010
【摘要】首先分析了对固定辐射源进行定位的2种模型:利用测角信息对固定辐射源的单站无源定位;利用角度及其变化率信息对固定辐射源的单站无源定位.分别对这2种定位方法进行分析,并通过推广卡尔曼滤波(EKF)算法对上述定位算法进行比较,加入角度变化率不但可以对目标瞬时定位,而且可以实现比只测向定位更高的定位精度.
【总页数】3页(P33-35)
【作者】何青益;胡东;李艳斌
【作者单位】中国电子科技集团公司第54研究所,河北,石家庄,050081;中国人民解放军65016部队,辽宁,沈阳,110162;中国电子科技集团公司第54研究所,河北,石家庄,050081
【正文语种】中文
【中图分类】TN975
【相关文献】
1.一种固定单站无源定位方法 [J], 霍光;李冬海;杨静
2.一种对三维固定辐射源的机载单站无源定位方法 [J], 王强;钟丹星;邓新蒲;周一宇
3.一种对固定宽带辐射源的机载单站无源定位方法 [J], 霍光;李冬海
4.一种机载单站对固定目标的无源定位方法 [J], 张卓然;叶广强;刘华伟
5.固定辐射源目标单机无源定位方法 [J], 张辉;陈赞
因版权原因,仅展示原文概要,查看原文内容请购买。