模糊控制算法研究
- 格式:doc
- 大小:298.50 KB
- 文档页数:16
模糊逻辑跟踪控制
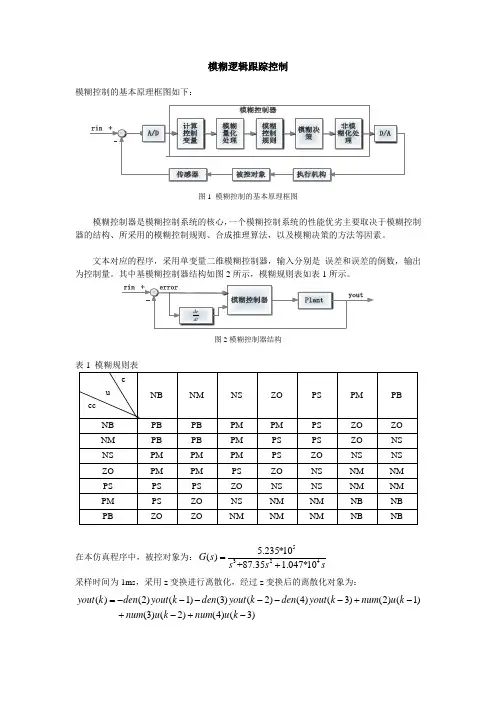
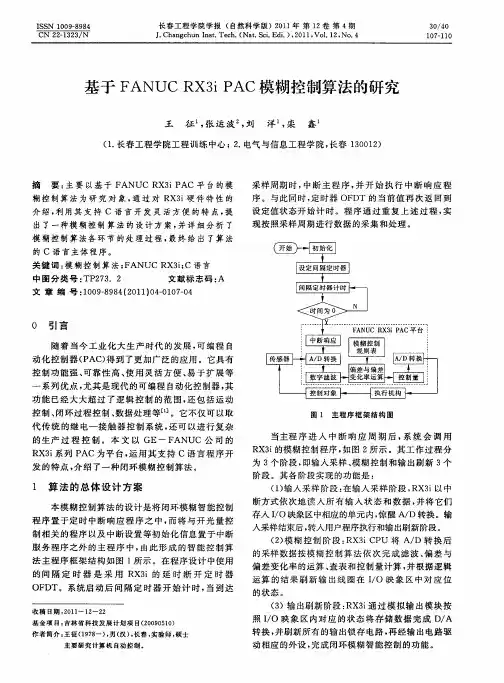
模糊控制的基本原理框图如下:
图1 模糊控制的基本原理框图
模糊控制器是模糊控制系统的核心,一个模糊控制系统的性能优劣主要取决于模糊控制器的结构、所采用的模糊控制规则、合成推理算法,以及模糊决策的方法等因素。
文本对应的程序,采用单变量二维模糊控制器,输入分别是 误差和误差的倒数,输出为控制量。
其中基模糊控制器结构如图2所示,模糊规则表如表1所示。
de dt
图2模糊控制器结构
表1 模糊规则表
在本仿真程序中,被控对象为:5
3245.235*10()+87.35 1.047*10G s s s s
=+
采样时间为1ms ,采用z 变换进行离散化,经过z 变换后的离散化对象为:
()(2)(1)(3)(2)(4)(3)(2)(1) (3)(2)(4)(3)
yout k den yout k den yout k den yout k num u k num u k num u k =------+-+-+-
其中,反模糊化采用“Centroid”方法,方波响应及控制器输出结果如图3和图4所示:。
模糊控制算法原理
模糊控制是一种基于经验的控制方法,它可以处理不确定性、模糊性和复杂性等问题,因此在工业控制、自动化、机器人等领域得到了广泛应用。
模糊控制算法的基本原理是将输入变量和输出变量映射成模糊集合,通过模糊推理来得到控制输出。
在这个过程中,需要使用模糊逻辑运算和模糊推理规则进行计算,最终得到模糊输出,再通过去模糊化转换为实际控制信号。
模糊控制算法的关键是如何构建模糊规则库。
规则库是由一系列模糊规则组成的,每个模糊规则包括一个前提和一个结论。
前提是由输入变量的模糊集合组成的,结论是由输出变量的模糊集合组成的。
在构建规则库时,需要依据专家经验或实验数据来确定模糊集合和模糊规则。
模糊控制算法的实现过程包括模糊化、模糊推理和去模糊化三个步骤。
模糊化是将输入变量映射成模糊集合的过程,它可以通过隶属度函数将输入变量的值转换为对应的隶属度值,表示它属于各个模糊集合的程度。
模糊推理是根据模糊规则库进行推理的过程,它可以通过模糊逻辑运算来计算各个规则的置信度,进而得到模糊输出。
去模糊化是将模糊输出转换为实际控制信号的过程,它可以通过一些去模糊化方法来实现,比如最大隶属度法、平均值法等。
模糊控制算法的优点是可以处理不确定性和模糊性,适用于复杂系统的控制;缺点是需要依赖专家经验或实验数据来构建规则库,而且计算复杂度较高,运算速度较慢。
因此,在实际应用中需要根据具体情况来选择控制算法。
模糊控制算法是一种基于经验的控制方法,可以处理不确定性、模糊性和复杂性等问题,在工业控制、自动化、机器人等领域得到了广泛应用。
在实际应用中,需要根据具体情况来选择控制算法,以保证控制效果和运算速度的平衡。
PID模糊控制算法介绍PID控制算法在控制系统中,PID是一种常用的控制算法,其全称为比例-积分-微分控制(Proportional-Integral-Derivative Control)算法。
PID控制是一种反馈控制算法,通过根据系统输出和预期输出之间的误差来调整控制器的输出,以使系统输出逼近预期输出。
PID控制算法被广泛应用于工业控制、机器人控制、自动驾驶等领域。
PID控制算法由三个部分组成: - 比例(Proportional):比例控制部分根据误差的大小,产生一个与误差成正比的控制量。
比例控制可以实现快速响应,但可能产生稳态误差。
- 积分(Integral):积分控制部分根据误差的累积值,产生一个与误差积分成正比的控制量。
积分控制可以消除稳态误差,但可能导致超调和振荡。
- 微分(Derivative):微分控制部分根据误差的变化率,产生一个与误差导数成正比的控制量。
微分控制可以增加系统的稳定性,减少超调和振荡,但可能引入噪声。
模糊控制模糊控制是一种基于模糊逻辑的控制方法,与传统的精确控制方法相比,模糊控制更适用于处理不确定性、模糊性和非线性的问题。
模糊控制使用模糊规则来描述输入和输出之间的映射关系,通过模糊推理和模糊集合运算来产生控制量。
PID模糊控制PID模糊控制是将PID控制算法与模糊控制相结合的一种控制方法。
PID模糊控制通过将PID控制器的参数调整为模糊集合,以便更好地适应系统的动态特性和非线性特性。
PID模糊控制可以克服PID控制算法在处理非线性系统时的局限性,提高控制系统的性能和鲁棒性。
PID模糊控制的基本原理PID模糊控制的基本原理是将PID控制器的输入和输出转换为模糊集合,通过模糊推理和模糊集合运算来确定最终的控制量。
具体步骤如下: 1. 确定模糊控制器的输入和输出变量:通常将系统误差和误差变化率作为模糊控制器的输入变量,将控制量作为输出变量。
2. 设计模糊规则库:根据经验和专家知识,设计一组模糊规则,来描述输入和输出之间的映射关系。
模糊逻辑与模糊控制算法的发展趋势在当今信息时代,人工智能(AI)和自动化技术的迅速发展已经改变了许多行业的面貌。
模糊逻辑和模糊控制算法作为人工智能的重要分支之一,在处理不确定性和模糊性方面发挥着关键作用。
随着科技的不断进步和需求的变化,模糊逻辑和模糊控制算法也在不断地发展和创新。
本文将探讨模糊逻辑与模糊控制算法的发展趋势,并对其未来发展方向进行展望。
一、模糊逻辑的发展趋势模糊逻辑是一种能够处理不确定性和模糊性的数学逻辑,它可以更好地模拟人类的思维方式和推理过程。
近年来,随着人工智能技术的广泛应用,模糊逻辑在各个领域展现出了其独特的优势。
1. 智能系统中的应用:随着物联网、大数据和云计算等技术的发展,智能系统在各个领域得到了广泛的应用,而模糊逻辑在智能系统中的应用也越来越广泛。
例如,在智能交通系统中,模糊逻辑可以用于交通信号灯控制、车辆自动驾驶等方面,从而提高交通系统的效率和安全性。
2. 自然语言处理方面的研究:模糊逻辑在自然语言处理领域也有着重要的应用。
它可以帮助计算机更好地理解自然语言中的模糊性和不确定性,从而提高自然语言处理系统的准确性和智能化程度。
3. 医疗诊断与治疗:在医疗领域,模糊逻辑可以用于医学诊断和治疗方面,特别是在处理不确定性较大的疾病诊断时,如癌症诊断、糖尿病管理等。
它可以帮助医生更准确地判断疾病的发展趋势和制定个性化治疗方案,从而提高医疗服务的质量和效率。
二、模糊控制算法的发展趋势模糊控制算法是一种基于模糊逻辑原理的控制方法,它可以应用于各种复杂系统的控制和优化。
随着工业自动化和智能化程度的提高,模糊控制算法在工程控制领域具有重要的应用前景。
1. 工业自动化中的应用:在工业生产过程中,模糊控制算法可以用于控制系统的优化和性能提升。
例如,在自动化生产线上,模糊控制算法可以帮助调节生产过程中的温度、压力等参数,从而提高生产效率和产品质量。
2. 机器人技术领域的发展:随着机器人技术的发展,模糊控制算法在机器人控制和路径规划方面也有着广泛的应用。
控制系统中的模糊控制算法设计与实现现代控制系统在实际应用中,往往面临着多变、复杂、非线性的控制问题。
传统的多变量控制方法往往无法有效应对这些问题,因此,模糊控制算法作为一种强大的控制手段逐渐受到广泛关注和应用。
本文将从控制系统中的模糊控制算法的设计和实现两个方面进行介绍,以帮助读者更好地了解和掌握这一领域的知识。
一、模糊控制算法的设计1. 模糊控制系统的基本原理模糊控制系统是一种基于模糊逻辑的控制系统,其基本思想是通过将输入和输出变量模糊化,利用一系列模糊规则来实现对系统的控制。
模糊控制系统主要由模糊化、规则库、模糊推理和解模糊四个基本部分组成,其中规则库是模糊控制系统的核心部分,包含了一系列的模糊规则,用于描述输入和输出变量之间的关系。
2. 模糊控制算法的设计步骤(1)确定输入和输出变量:首先需要明确系统中的输入和输出变量,例如温度、压力等。
(2)模糊化:将确定的输入和输出变量进行模糊化,即将其转换为模糊集合。
(3)建立模糊规则库:根据实际问题和经验知识,建立一系列模糊规则。
模糊规则关联了输入和输出变量的模糊集合之间的关系。
(4)模糊推理:根据当前的输入变量和模糊规则库,利用模糊推理方法求解输出变量的模糊集合。
(5)解模糊:将求解得到的模糊集合转换为实际的输出值,常用的方法包括最大值法、加权平均法等。
3. 模糊控制算法的设计技巧(1)合理选择输入和输出变量的模糊集合:根据系统的实际需求和属性,选择合适的隶属函数,以便更好地描述系统的特性。
(2)精心设计模糊规则库:模糊规则库的设计是模糊控制算法的关键,应根据实际问题与经验知识进行合理的规则构建。
可以利用专家经验、试验数据或者模拟仿真等方法进行规则的获取和优化。
(3)选用合适的解模糊方法:解模糊是模糊控制算法中的一项重要步骤,选择合适的解模糊方法可以提高控制系统的性能。
常用的解模糊方法有最大值法、加权平均法、中心平均法等,应根据系统的需求进行选择。
电机控制系统中的非线性控制算法优化研究一、引言电机控制系统是工业自动化中的重要组成部分,广泛应用于电力、交通、机械等多个领域。
传统的PID控制方法在电机控制中已经取得了显著的成果,但随着系统的复杂性和要求的提高,非线性因素在电机控制中变得越来越重要。
因此,研究电机控制系统中的非线性控制算法优化对于提高控制精度和系统性能具有重要意义。
二、非线性控制算法的概述1. 模糊控制算法模糊控制算法基于模糊逻辑原理,通过将模糊规则与输入输出关系建立映射关系,实现对非线性系统的控制。
该算法在电机控制中应用广泛,不仅可以处理具有非线性特性的系统,还能够应对系统参数变化和外部扰动等问题。
2. 神经网络控制算法神经网络控制算法通过利用神经网络的非线性映射能力,对电机控制系统进行建模和控制。
该算法具有良好的鲁棒性和自适应性,能够应对电机控制系统变化较大的工况和环境。
3. 遗传算法优化控制算法遗传算法优化控制算法通过模拟自然进化过程,通过选择、交叉和变异等操作,对电机控制系统的参数进行优化,实现对非线性控制系统的优化控制。
该算法不依赖于系统的数学模型,适用于非线性控制系统的优化问题。
4. 自适应控制算法自适应控制算法通过不断调整系统参数,迅速适应系统的变化,提高对非线性因素的抑制能力和控制精度。
该算法在电机控制系统中被广泛应用,特别适用于参数变化较快的控制系统。
三、非线性控制算法优化研究的挑战在电机控制系统中研究非线性控制算法优化存在以下挑战:1. 实时性要求:电机控制系统对控制算法的实时性要求较高,需要在短时间内生成可靠的控制信号,因此非线性控制算法的优化也需要具备实时性。
2. 系统参数变化:电机控制系统往往受到负载、温度等因素的影响,导致系统参数发生变化,这对非线性控制算法的稳定性和鲁棒性提出了更高的要求。
3. 非线性特性:电机控制系统的非线性特性较强,包括转子惯量、摩擦力等,这对非线性控制算法的建模和控制精度提出了更高的要求。
基于模糊 pid 的供热管网控制方法研究近年来,随着经济的发展,能源管理和节能减排日益受到重视,人们对供热管网控制方法的研究有了新的要求。
供热管网是一种复杂的系统,它由多个传热源和需求构成,要实现热力系统的有效控制,必须采用合适的控制策略。
传统的控制方法不能有效满足热力系统的需求,抗干扰性差,这就需要利用新的控制方法来实现有效控制。
基于模糊 PID制方法就是一种新的控制策略,它能够实现有效的供热管网控制,具有很高的实用价值。
什么是模糊 pid制?模糊 pid制是一种结合传统的 PID制和模糊控制两种技术的新型控制系统。
它将传统的 PID制的静态特性和模糊控制的动态特性结合起来,使系统具有良好的抗干扰能力和快速反应能力。
模糊 pid制在供热管网中的应用十分广泛,并取得了良好的控制效果,能够有效满足热力系统的要求。
模糊 pid制的基本原理是通过模糊控制算法使系统能够根据实际情况自适应地调整输出以实现目标。
传统的 PID制算法将控制量分解成偏差,积分和微分三个部分,然后根据控制参数计算出控制量。
但是这种方法有一个缺点,就是当系统参数波动时,控制量会发生明显变化,导致系统运行失常。
因此,模糊 pid制算法中引入了模糊逻辑,使系统能够根据实际情况自适应地调整控制量以达到目标,从而提高了控制系统的抗干扰性和响应速度。
模糊 pid制在供热管网中的应用有着重要意义。
首先,模糊 pid 制能够有效满足供热管网的控制要求。
由于供热管网的运行具有非线性、时变特性,传统的 PID制方法很难达到预期的控制效果。
但是基于模糊 pid制可以根据实际情况自适应地调整控制量以实现预期的控制效果,有效改善供热管网的控制效果。
其次,模糊 pid制还能够节约能源,保证热力系统的安全运行。
模糊 pid制的调节性好,能够有效改善系统的负载分布,有效降低热力系统的能耗,节约能源,保证系统的安全运行。
本文详细研究了基于模糊 PID制的供热管网控制方法,阐述了这种控制方法的基本原理及其在供热管网中的应用。
模糊PID控制算法模糊控制是一种基于模糊逻辑的控制策略,可以在一定程度上解决传统PID控制在复杂、非线性系统中的不足。
模糊PID控制算法是将传统PID控制与模糊控制相结合的一种控制方法。
模糊控制通过模糊集合、模糊规则和模糊推理等概念来进行控制决策,将模糊集合表示为隶属度函数的形式。
在模糊PID控制中,输入信号和输出信号被表示为模糊集合,以反映系统的模糊特性。
1.设计模糊控制器的输入和输出变量,以及它们的模糊集合。
输入变量常根据控制系统的误差、误差变化率和积分误差来选取,输出变量为控制器输出。
2.设计模糊规则库。
根据经验和专家知识,建立模糊规则库,其中规则的形式是:“如果...,那么...”。
规则库中的模糊规则由若干模糊规则组成,每条规则都包含一个模糊逻辑表达式。
3.构建模糊推理机制。
模糊推理是模糊控制的核心,它是根据输入信号的隶属度函数和模糊规则库来获得输出信号的过程。
常见的模糊推理方法有最大隶属度法、最小隶属度法和平均隶属度法。
4.确定模糊控制器的输出。
通过模糊推理机制计算出的输出隶属度函数,用去模糊化方法将其转化为实际的控制量。
5.将模糊控制器输出与系统输出进行比较,计算误差,并利用PID控制算法进行调整产生新的控制量。
1.能够处理非线性系统。
由于模糊控制具有非精确性和模糊性,可以更好地适应非线性系统的特性。
2.具有适应性。
模糊PID控制算法具有自适应调节的能力,可以针对不同的系统和工况进行自动调整。
3.具有鲁棒性。
模糊控制通过引入模糊集合和模糊规则来处理噪声和干扰,提高了控制系统的鲁棒性。
4.高效性能。
模糊PID控制算法结合了PID控制的优点,能够在快速响应和稳定控制之间找到一个平衡。
然而,模糊PID控制算法也存在一些不足之处:1.设计复杂度高。
模糊PID控制需要设计模糊集合、模糊规则库和模糊推理机制,设计过程较为复杂,需要专业的知识和经验。
2.性能依赖于模糊规则。
模糊控制的性能很大程度上依赖于模糊规则的设计和选择,不合理的规则设计可能导致控制性能下降。
PID及模糊控制算法PID控制算法是一种传统的控制算法,它通过对系统的误差进行测量并相应地调整控制器的输出来实现系统稳定和精确控制。
PID算法是基于系统的反馈控制原理设计的,并广泛应用于各种工业系统中。
PID控制算法由三个参数组成:比例项(P),积分项(I)和微分项(D)。
比例项根据当前误差的大小进行控制输出,积分项根据历史误差的累积进行控制输出,微分项根据误差变化的速率进行控制输出。
这三个项的组合使用可以使系统具有快速响应、稳定性和抗干扰能力。
比例项的作用是根据当前误差对控制器的输出进行调整。
当误差较大时,比例项可以使控制器更快地对系统进行调整,以减小误差。
然而,如果比例项过大,就可能导致系统产生振荡甚至不稳定。
积分项的作用是根据历史误差的累积对控制器的输出进行调整。
当系统存在静态误差时,积分项可以通过积累误差来逐渐减小静态误差。
然而,积分项过大可能导致系统产生超调或过冲现象。
微分项的作用是根据误差变化的速率对控制器的输出进行调整。
微分项可以通过反馈误差的变化率来提前调整控制器的输出,以减小误差的变化速率。
然而,由于微分项对高频噪声敏感,过大的微分项可能导致系统产生振荡。
模糊控制算法是一种基于模糊逻辑的控制算法,它能够处理非线性和模糊性问题。
模糊控制算法通过将输入和输出的模糊集合和一组模糊规则进行匹配,来确定控制器的输出。
模糊控制算法适用于无法准确建立系统数学模型或系统模型非常复杂的情况下。
模糊控制算法主要由三个部分组成:模糊化、推理和解模糊化。
模糊化将输入和输出的实际值通过模糊化函数转换为模糊集合,推理根据一组模糊规则来确定控制器的输出模糊集合,解模糊化将输出模糊集合通过解模糊化函数转换为实际值作为控制器的输出。
模糊控制算法中的模糊集合和模糊规则的设计通常需要经验和专业知识。
模糊集合的划分和隶属函数的选择会对控制器的性能产生重要影响。
模糊控制算法的设计也需要进行系统的调试和优化,以获得最佳的控制效果。
《智能控制》
课程设计报告
专业:自动化
班级:学号:
学生:
时间:13年12月30日~13年1月3日
―――――――以下指导教师填写―――――分项成绩:出勤设计报告
总成绩:
指导教师:
设计报告要求和成绩评定
1 报告容
设计任务书(设计计划),正文,参考资料。
设计任务书(设计计划)由学生所在系安排指导教师编写,容包括设计地点、时间、安排和设计容和要求等。
正文容一般包括:(1)设计简述(设计时间、设计地点,设计方式等);(2)设计容叙述;(3)设计成品(图纸、表格或计算结果等);(4)设计小结和建议。
参考资料包括参考书和现场技术资料等。
2 书写用纸
A4复印纸;封面、设计任务书要求双面打印。
3 书写要求
正文容手工双面或单面书写,字迹清楚,每页20行左右,每行30字左右,排列整齐;页码居中写在页面下方;纸面上下左右4侧边距均为2厘米。
公式单占一行居中书写;插图要有图号和图题,图号和图题书写在插图下方;表格要有表号和表题,表号和表题在表格上方书写;物理量单位和符号、参考文献引用和书写以及图纸绘制要符合有关标准规定;有关细节可参考我院《毕业设计成品规》。
4 装订
装订顺序:封面,设计任务书,正文及参考资料,封底;左边为装订边,三钉装订,中间钉反向装订。
5 成绩评定
设计成绩一般由出勤(10分)、报告书写规性及成品质量(50分)、考核(40分)三
部分成绩合成后折合为优秀(90-100分)、良好(80-89分)、中(70-79分)、及格(60-69分)或不及格(60分以下)。
设计考核可采取笔试、机试或其它合适的方式;不参加考核或不交报告者成绩为零分。
模糊控制算法研究
一、课程设计的目的:
1. 通过本次课程设计,进一步了解模糊控制的基本原理、模糊模型的建立和模
糊控制器的设计过程。
2. 提高学生有关控制系统的程序设计能力;
3. 熟悉Matlab语言以及在智能控制设计中的应用。
二、课程设计的基本容:
假设系统的模型可以用二阶加纯滞后表示,即传递函数为
12()(1)(1)
d s
f f Ke G s T s T s τ-=
++。
其中各参数分别为1240,10,60,2f f d K T T τ====。
图1 模糊控制系统Simulink 仿真模型图
1、用Matlab 中的Simulink 工具箱,组成一个模糊控制系统,如图1所示。
2、采用模糊控制算法,设计出能跟踪给定输入的模糊控制器,对被控系统进行仿真,绘制出系统的阶跃响应曲线。
(1)模糊集合及论域的定义
对误差E 、误差变化EC 机控制量U 的模糊集合及其论域定义如下: E 、EC 和U 的模糊集合均为: {NB 、NM 、NS 、0、PS 、PM 、PB} E 和EC 的论域为:
{-6、-5、-4、-3、-2、-1、0、1、2、3、4、5、6} U 的论域为:
{-6、-5、-4、-3、-2、-1、0、1、2、3、4、5、6}
上述的三个模糊集合都选取了7个元素,主要目的是着眼于提高稳态精度。
E 、EC 和U 的隶属度函数图形如图2,3,4 所示:
图2 变量E的隶属度函数
图3 变量EC的隶属度函数
图4 变量U的隶属度函数
(2)模糊控制规则设计
模糊控制规则如下表所示:
表1 模糊控制规则
NB NM NS ZO PS PM PB
NB NM NS ZO PS PM PB NB
NB
NB
NB
NB
NB
NB
NB
NB
NM
NM
NS
ZO
ZO
NB
NM
NS
NS
ZO
PS
PS
NB
NM
NS
ZO
PS
PM
PB
NS
NS
ZO
PS
PS
PM
PB
ZO
ZO
PS
PM
PM
PB
PB
PB
PB
PB
PB
PB
PB
PB
(3)系统的参数选择
系统所选用的参数为:Saturation、Saturation1、Saturation2的围分别为:[-6 6]、[-6 6]、[-6 6],Transport Delay=2S。
通过调试得到模糊控制的参数:Gain1=0.7,Gain=1.8,Gain2=1
(4)仿真结果:
系统的阶跃响应曲线如图5所示,其中上方的曲线代表系统的阶跃响应,下方的曲线是系统的模糊控制量的变化。
图5 阶跃输入的响应曲线图
本设计中控制系统性能的要求为:错误!未找到引用源。
,错误!未找到引用源。
,错误!未找到引用源。
由图5中曲线可知:
错误!未找到引用源。
28% 符合要求
错误!未找到引用源。
65s 符合要求
错误!未找到引用源。
2.3% 符合要求
3、改变模糊控制器中模糊变量的隶属度函数,分析隶属度函数和模糊控制规则
对模糊控制效果的影响。
比较那种情况下的控制效果较好。
如下图所示改变模糊控制器中的隶属度函数为梯形隶属函数。
图7 变量E的隶属度函数
图8 变量EC的隶属度函数
图9 变量U的隶属度函数
此时系统的阶跃响应曲线为:
图 10 系统的阶跃响应曲线
由以上的仿真结果可以看出梯形隶属度函数的系统性能没有三角形隶属度函数的系统性能好。
此时系统的超调量变大,上升时间增大,稳态误差变大。
4、给系统加上扰动,观察此时的阶跃响应曲线,看系统是否仍然稳定,并与无扰动情况下的阶跃响应曲线进行比较。
并比较模糊控制和PID控制的鲁棒性。
(1)加扰动时的模型图如图11所示(其中step1为幅值为0.02的阶跃信号)。
图11 加扰动后的系统模型图
系统的阶跃响应曲线为:
图12 系统的阶跃响应曲线
由图可知,系统加上扰动之后,系统仍然是稳定的,系统性能指标变化不大,说明有着良好的鲁棒性。
究其原因,在Saturation2之前加的扰动,相当于被控制对象的输入量在对应时刻又并联了一个输入,从而在对应的各个时刻相当于K 增益变大;显而易见,K的增大,有助于系统的稳定,但是会使超调量变大。
调
整时间变小,与实验的结果是吻合的。
5、改变系统的参数,了解模糊控制在系统参数发生变化时的控制效果。
并与PID控制器作用下系统参数发生变化时的控制效果进行比较,思考模糊控制相对于传统控制的优点。
(1)当系统开环增益k分别取k=35,k=40和k=45时系统的阶跃响应如图所示。
(2)
当系统纯延时错误!未找到引用源。
分别取错误!未找到引用源。
、错误!未找到引用源。
和错误!未找到引用源。
时系统的阶跃响应如图所示。
图14系统纯滞后时间变化对系统阶跃响应的影响
(3)当系统惯性时间常数错误!未找到引用源。
分别取错误!未找到引用源。
、错误!未找到引用源。
和错误!未找到引用源。
时系统的阶跃响。
从图可以看出增大K 值,系统的上升时间减小,此时超调量稍有增加;当系统的纯滞后时间增大时,系统的超调量增加较大。
系统的惯性时间常数增大后使系统动态性能有所降低,当时间常数T2增大时上升时间增大,但超调量有所降低。
三、模糊控制的优点
模糊控制是一种基于规则的控制,它直接采用语言型控制规则,出发点是现场操作人员的控制经验或相关专家的知识,在设计中不需要建立被控对象的精确的数学模型,因而使得控制机理和策略易于接受与理解,设计简单,便于应用。
模糊控制是基于启发性的知识及语言决策规则设计的,这有利于模拟人工控制的过程和方法,增强控制系统的适应能力,使之具有一定的智能水平。
通过本设计可以知道,模糊控制具有能够得到良好的动态响应性能,并且不需要知道被控对象的数学模型,适应性强,上升时间快,鲁棒性好。
与PID 控制相比有着很大的优势,采用PID 控制虽然稳态性能较好,但是难以得到满意的动态响应性能,并且鲁棒性差。
模糊控制也有着自身的缺点,容易受到模糊规则
等级的限制而引起误差,需要进一步改进。
四、总结
通过本次课程设计增加了对模糊调节器的理解,认识到了模糊控制器的优缺点。
并进一步熟练了用Matlab中Simulink工具箱的应用,提高了自己的动手能力。
然而由于对matlab软件的使用不熟练,设计过程中遇到了困难,但在同学的帮助与指导下,熟悉了matlab的指令,才使设计的顺利进行。
同时在设计的过程中学到了不少知识,提高了自己的科学素养,使我认识到搞学术需要耐心和一丝不苟的态度。
五、参考文献
《智能控制理论及应用》师黎铁军利娜晓媛编著
《自动控制理论》夏德铃翁贻方机械工业
《计算机控制技术》王书峰谭健豪主编。