基于单目图像的人脸深度估计
- 格式:pdf
- 大小:1.70 MB
- 文档页数:3
单目深度估计商用案例
单目深度估计(Monocular depth estimation)是一种从单个图像中推断
深度信息的技术。
由于其具有成本低、设备简单等优势,单目深度估计在许多商用场景中都有广泛的应用。
以下是一些单目深度估计的商用案例:
1. 自动驾驶:自动驾驶汽车需要精确的深度信息来理解周围环境并做出决策。
单目深度估计可以为自动驾驶系统提供实时、低成本的深度信息,帮助车辆识别障碍物、道路标记和交通信号等。
2. 机器人导航:在工厂、仓库和家庭等环境中,机器人需要精确的深度信息来识别障碍物并进行避障。
单目深度估计可以为机器人提供实时的深度感知能力,提高其导航和操作的准确性。
3. 增强现实:增强现实技术可以将虚拟内容与现实世界相结合,为用户提供更加丰富的交互体验。
单目深度估计可以为增强现实应用提供精确的深度信息,使得虚拟内容能够更加自然地融入现实场景。
4. 安全监控:在安全监控领域,单目深度估计可以帮助监控系统识别出运动物体的距离和速度,提高监控的准确性和实时性。
5. 虚拟现实和游戏:在虚拟现实和游戏中,单目深度估计可以为用户提供更加真实的沉浸式体验。
通过精确的深度信息,游戏和虚拟现实场景中的物体可以呈现出更加逼真的透视效果。
以上案例只是单目深度估计在商用领域的一部分应用,随着技术的不断发展和成本的降低,相信未来会有更多的商业场景会应用到单目深度估计技术。
计算机视觉中的单目深度估计技术研究随着计算机视觉领域的不断发展和进步,单目深度估计技术也越来越成熟,正在成为计算机视觉领域中的一个重要的研究方向。
单目深度估计是指利用单目视觉信息,估计场景中物体的深度信息。
本文将对单目深度估计技术进行详细的介绍和分析。
一、单目深度估计的背景和意义对于计算机视觉来说,物体的三维信息对于场景理解和后续任务的执行是非常重要的。
例如,对于自动驾驶来说,深度信息可以帮助车辆控制系统感知到前方的交通信号和路标等信息,从而更加精准地进行驾驶决策。
而对于机器人来说,深度信息则可以帮助机器人掌握周围环境的结构信息,从而更加高效地执行特定的任务。
在过去,人们通常使用双目或者多目摄像头来进行深度估计。
但是,这种方案需要使用多个摄像头,需要专门的硬件设备,造成了成本和复杂度的增加。
而单目深度估计则可以单独利用一个摄像头来进行,更加方便和实用。
二、单目深度估计的方法(一)传统方法传统的单目深度估计方法通常基于基础矩阵或者本质矩阵来进行,利用摄像头在不同位置所拍摄的图像来计算物体的深度信息。
该方法通常使用多个图像来进行计算,也就意味着计算成本较高。
而且需要对相机参数进行精确的标定,才可以保证计算出的结果准确可靠。
(二)深度学习方法随着深度学习技术的不断发展和进步,深度学习方法在单目深度估计中也开始得到广泛的应用。
深度学习方法可以将大量的图片数据输入到模型中进行训练,可以学习到更丰富和准确的特征信息,从而得到更加精准的深度估计结果。
其中,常用的深度学习方法包括:1. 单幅图像深度估计(Single Image Depth Estimation,SIREN)SIREN是一种基于深度学习的单幅图像深度估计方法。
该方法通过使用卷积神经网络(CNN)来学习输入图像的特征信息,并利用回归模型来估计物体的深度信息。
该方法通常使用图像自编码器来进行训练,可以避免过拟合的问题,得到更加准确和鲁棒的结果。
2. 基于立体匹配的深度估计方法基于立体匹配的深度估计方法是一种用于立体图像的深度估计算法。
leia的单目深度估计算法
Leia是一个单目深度估计算法,旨在从单个图像中推断场景中物体的深度信息。
该算法通过利用卷积神经网络(CNN)和
传统计算机视觉技术实现深度估计。
Leia算法的主要步骤包括:
1. 数据准备:收集并标注带有深度信息的图像数据集作为训练集。
2. 网络设计:设计一个CNN网络结构,该网络接受单目图像
作为输入,并输出每个像素的深度估计值。
3. 训练:使用训练集对CNN网络进行训练,通过最小化深度
估计值与真实深度的误差来优化网络参数。
4. 测试:使用测试集对训练好的网络进行评估,并计算深度估计的准确性。
5. 后处理:对深度估计结果进行后处理,如去噪、光照校正等,以提高估计结果的质量。
6. 应用:将深度估计结果应用于相关的计算机视觉任务,如虚拟增强现实、自动驾驶等。
Leia算法的优势在于可以实现从单个图像中估计深度,而不需要额外的传感器或摄像头。
这对于一些实际应用中有限的资源和环境要求非常有益。
然而,由于单目深度估计问题本身的挑战性,Leia算法的深度估计精度可能受到一定的限制。
为了进一步提高性能,该算法可以与其他技术如立体视觉、光流估计等进行结合。
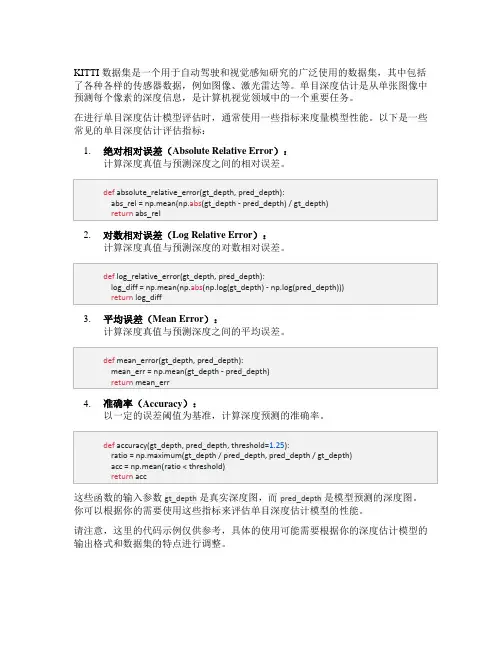
KITTI 数据集是一个用于自动驾驶和视觉感知研究的广泛使用的数据集,其中包括了各种各样的传感器数据,例如图像、激光雷达等。
单目深度估计是从单张图像中预测每个像素的深度信息,是计算机视觉领域中的一个重要任务。
在进行单目深度估计模型评估时,通常使用一些指标来度量模型性能。
以下是一些常见的单目深度估计评估指标:
1.绝对相对误差(Absolute Relative Error):
计算深度真值与预测深度之间的相对误差。
2.对数相对误差(Log Relative Error):
计算深度真值与预测深度的对数相对误差。
3.平均误差(Mean Error):
计算深度真值与预测深度之间的平均误差。
4.准确率(Accuracy):
以一定的误差阈值为基准,计算深度预测的准确率。
这些函数的输入参数gt_depth是真实深度图,而pred_depth是模型预测的深度图。
你可以根据你的需要使用这些指标来评估单目深度估计模型的性能。
请注意,这里的代码示例仅供参考,具体的使用可能需要根据你的深度估计模型的输出格式和数据集的特点进行调整。
单目深度估计综述近年来,深度估计技术在计算机视觉研究中得到了广泛的应用。
深度估计技术是一种方法,可以根据图像或视频帧中的像素,估算出目标物体的距离或深度信息。
它可以帮助我们进行物体检测和分类、目标跟踪等计算机视觉应用任务。
目前,单目深度估计作为一种很有前途的技术,已经得到了越来越多人的关注,其优势在于可以节省设备成本和功耗,同时也可以满足可用性和实时要求。
单目深度估计可以遵循以下一般步骤:(1)计算出图像或视频帧中的每个像素的深度,(2)根据特定的算法,使用深度信息进行物体检测、分割和分类。
单目深度估计对于计算光流、光强变换等技术也有重要意义,可以用来现场重建和实时分析深度信息。
随着机器学习、深度学习以及大数据计算技术的发展,在单目深度估计方面也有许多研究进展。
这些技术的核心思想是利用机器学习的模型来学习深度估计方法,从而精确估算出图像中目标物体的深度值。
其中,基于深度学习的方法具有较高的准确度,而且需要较少的数据来训练模型,因此目前深受欢迎。
在单目深度估计方面,深度学习技术通常可以分为基于极线匹配方法、基于光流法和基于深度神经网络三大类。
基于极线匹配方法通常使用传统的机器学习技术,如SIFT(Scale Invariant Feature Transform)或SURF(Speeded-Up Robust Feature),以及图像处理技术,如角点检测,来估计图像中目标物体的深度值。
基于光流法则利用光流来模拟物体的运动,以估计目标物体的深度。
基于深度神经网络的技术则使用深度神经网络来模拟深度估计问题,以实现更准确的深度值估计效果。
然而,单目深度估计仍然是一项具有挑战的技术,存在许多技术问题和挑战,如信息丢失、模型噪声以及系统参数等等。
针对这些问题,可以通过提高训练集的大小、应用正则化技术、改进训练算法以及提高模型复杂度等方法来解决。
最后,单目深度估计仍然是一个正在发展的领域,现有的技术仍然存在许多的问题,但仍然具有很大的潜力。
自监督单目深度估计原理
自监督单目深度估计是指利用单个摄像头拍摄的图像来估计场景的深度信息,而无需使用其他传感器或者深度相机。
这种方法的原理是利用图像中的视觉线索和几何约束来推断场景的深度。
自监督深度估计的原理主要基于以下几个方面:
1. 视差,通过分析图像中不同位置的像素之间的视差,可以推断出物体距离摄像头的远近。
视差越大的像素对应着距离摄像头更近的物体,而视差较小的像素对应着距离更远的物体。
2. 运动信息,利用图像序列中相邻帧之间的物体运动信息,可以推断出物体的深度。
通过分析物体在图像中的位移和变形,可以估计出物体的相对深度关系。
3. 单目几何约束,利用单目相机成像的几何特性,如透视投影和相机运动模型,可以推断出物体的深度信息。
通过分析图像中的线条、纹理和形状等特征,可以推断出物体的相对位置和距离。
4. 深度学习方法,近年来,深度学习技术在自监督深度估计中
得到了广泛应用。
通过使用深度神经网络来学习图像特征和深度信息之间的映射关系,可以实现更精确的深度估计。
综上所述,自监督单目深度估计的原理涉及视差分析、运动信息推断、单目几何约束和深度学习方法等多个方面。
通过综合利用这些信息,可以实现从单个图像中推断出场景的深度信息。
这种方法在无需使用额外传感器的情况下,能够实现对场景深度的有效估计,具有广泛的应用前景,如自动驾驶、增强现实等领域。
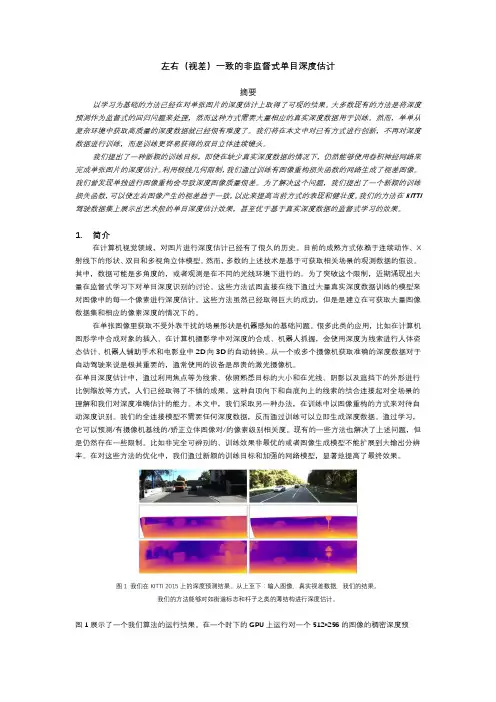
左右(视差)一致的非监督式单目深度估计摘要以学习为基础的方法已经在对单张图片的深度估计上取得了可观的结果。
大多数现有的方法是将深度预测作为监督式的回归问题来处理,然而这种方式需要大量相应的真实深度数据用于训练。
然而,单单从复杂环境中获取高质量的深度数据就已经很有难度了。
我们将在本文中对已有方式进行创新,不再对深度数据进行训练,而是训练更容易获得的双目立体连续镜头。
我们提出了一种新颖的训练目标,即使在缺少真实深度数据的情况下,仍然能够使用卷积神经网络来完成单张图片的深度估计。
利用极线几何限制,我们通过训练有图像重构损失函数的网络生成了视差图像。
我们曾发现单独进行图像重构会导致深度图像质量很差。
为了解决这个问题,我们提出了一个新颖的训练损失函数,可以使左右图像产生的视差趋于一致,以此来提高当前方式的表现和健壮度。
我们的方法在KITTI 驾驶数据集上展示出艺术般的单目深度估计效果,甚至优于基于真实深度数据的监督式学习的效果。
1.简介在计算机视觉领域,对图片进行深度估计已经有了很久的历史。
目前的成熟方式依赖于连续动作、X 射线下的形状、双目和多视角立体模型。
然而,多数的上述技术是基于可获取相关场景的观测数据的假设。
其中,数据可能是多角度的,或者观测是在不同的光线环境下进行的。
为了突破这个限制,近期涌现出大量在监督式学习下对单目深度识别的讨论。
这些方法试图直接在线下通过大量真实深度数据训练的模型来对图像中的每一个像素进行深度估计。
这些方法虽然已经取得巨大的成功,但是是建立在可获取大量图像数据集和相应的像素深度的情况下的。
在单张图像里获取不受外表干扰的场景形状是机器感知的基础问题。
很多此类的应用,比如在计算机图形学中合成对象的插入、在计算机摄影学中对深度的合成、机器人抓握,会使用深度为线索进行人体姿态估计、机器人辅助手术和电影业中2D向3D的自动转换。
从一个或多个摄像机获取准确的深度数据对于自动驾驶来说是极其重要的,通常使用的设备是昂贵的激光摄像机。
单目深度估计技术进展综述一、概述单目深度估计技术是计算机视觉领域中的重要研究方向之一,其目标是通过从单张图像中估计场景中每个像素点的深度信息。
深度估计技术在自动驾驶、虚拟现实、机器人导航等领域具有广泛的应用前景。
本文将全面、详细、完整地探讨单目深度估计技术的进展。
二、基于传统计算机视觉方法的单目深度估计技术2.1 结构光法2.2 缺陷光流法2.3 聚焦法三、深度学习在单目深度估计中的应用3.1 卷积神经网络的应用1.使用卷积神经网络进行深度估计的基本原理2.基于卷积神经网络的深度估计方法综述3.2 递归神经网络的应用1.递归神经网络在单目深度估计中的优势2.基于递归神经网络的深度估计方法研究进展3.3 生成对抗网络的应用1.生成对抗网络在单目深度估计中的作用2.基于生成对抗网络的深度估计方法发展现状3.4 多尺度深度估计方法1.多尺度深度估计的原理与优势2.多尺度深度估计方法的研究进展四、单目深度估计技术的评价指标与数据集4.1 评价指标1.视差与深度之间的关系2.常用的深度估计评价指标4.2 数据集1.NYU Depth V2数据集2.KITTI Vision Benchmark Suite数据集3.Make3D数据集五、应用与展望5.1 自动驾驶领域中的应用5.2 虚拟现实领域中的应用5.3 机器人导航领域中的应用5.4 单目深度估计技术的未来发展趋势六、总结本文从传统计算机视觉方法到深度学习方法,全面分析了单目深度估计技术的进展和应用。
通过评价指标与数据集的介绍,读者可以更好地了解该领域的研究情况。
最后,我们对单目深度估计技术的未来进行了展望,并指出了该领域需要解决的挑战和发展方向。
参考文献1.Mayer, N., Ilg, E., Hausser, P., Fischer, P., Cremers, D.,Dosovitskiy, A., & Brox, T. (2016). A Large Dataset to TrainConvolutional Networks for Disparity, Optical Flow, and Scene Flow Estimation. In Proceedings of the IEEE Conference on ComputerVision and Pattern Recognition.2.Eigen, D., Puhrsch, C., & Fergus, R. (2014). Depth Map Predictionfrom a Single Image using a Multi-Scale Deep Network. In Advances in Neural Information Processing Systems.3.Eigen, D., Fergus, R., & others. (2015). Predicting Depth, SurfaceNormals and Semantic Labels with a Common Multi-ScaleConvolutional Architecture. In Proceedings of the IEEEInternational Conference on Computer Vision.4.Fu, H., Gong, M., Wang, C., Batmanghelich, K., & Tao, D. (2018).Deep ordinal regression network for monocular depth estimation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition.5.Khosroshahi, P., & Kalantar-Zadeh, K. (2019). Generativeadversarial networks for depth map estimation from singlemonocular images. IEEE Transactions on Image Processing.。
邮局订阅号:82-946120元/年技术创新软件时空《PLC 技术应用200例》您的论文得到两院院士关注戈曼:硕士基金项目:基金颁发部门:国家自然科学基金委;项目名称:彩色夜视中景物深度及空间透视立体视觉感的研究;编号:(61072090);基金申请人:孙韶媛基于单目深度估计的红外图像彩色化方法Infrared Image Colorization Based on Monocular Depth Estimation(东华大学)戈曼孙韶媛席林谯帅GE Man SUN Shao-yuan XI Lin QIAO Shuai摘要:针对夜视红外图像深度信息估计问题,根据红外图像的特点,用地平线检测和最大类间方差法分割得到一幅具有深度信息的图像,然后运用透视学中饱和度、色调对比度与深度的关系,用色彩传递算法对红外图像做彩色化处理,得到一幅视觉上具有立体感的彩色红外图像。
关键词:深度估计;彩色夜视;立体感;色彩饱和度;深度图中图分类号:TP391文献标识码:AAbstract:For the problem of estimating the depth from the night vision infrared image,according to the characteristics of infrared images,we use maximum between-cluster variance and the horizon detection methods to get a depth map of an infrared image.Then according the relationship between saturation,hue,and the depth in perspective,we transfer colors to the infrared image and obtain a color infrared image with three-dimensional visual perception.Keywords:depth estimation;color night vision;three-dimensional;color saturation;depth map文章编号:1008-0570(2012)10-0413-021引言在彩色夜视技术中,只关注色调的自然正确性是不够的,如何使彩色化后的夜视图像能在视觉效果上体现景物的空间立体感也是重要的研究方向。