半实物网络控制系统仿真平台设计
- 格式:pdf
- 大小:296.99 KB
- 文档页数:3
基于EXata的半实物仿真功能设计与实现
卢毅;水宜水;郭建飞
【期刊名称】《广东通信技术》
【年(卷),期】2022(42)11
【摘要】通信网络半实物仿真是一种极为重要的设计辅助手段,通过引入实物节点,仿真网络可实时地与实物节点进行互联互通,保证仿真与实装设备协议的匹配度。
EXata作为网络仿真领域十分常用的仿真平台,具有人机界面友好、操作灵活简便的半实物仿真功能特点,然而在与之连接的实物平台业务类型不属于EXata自带业务时,与EXata虚拟网络进行数据交互时业务数据将不被识别并丢弃,对EXata半实物仿真实现原理进行深入剖析后,设计开发了一种通用应用对外部业务数据进行识别,并通过开发外部接口实现对仿真网络数据的获取与分发控制。
【总页数】5页(P71-75)
【作者】卢毅;水宜水;郭建飞
【作者单位】中国电子科技集团公司第七研究所
【正文语种】中文
【中图分类】TP3
【相关文献】
1.基于LabVIEW和FPGA的半实物仿真平台的设计与实现
2.基于半实物仿真的Semi-TCP协议的实现与测试
3.基于MVB列车网络控制系统的半实物仿真平台设
计与实现4.基于GL Studio的飞行模拟器半实物仿真仪表的设计与实现5.基于EXata的离散事件半实物仿真方法研究
因版权原因,仅展示原文概要,查看原文内容请购买。

ISSN 1002-4956 CN11-2034/T实验技术与管理Experimental Technology and M a n a g e m e n t第38卷第3期202丨年3月Vol.38 N o.3Mar. 2021D O I:10.16791/j.c n k i.s j g.2021.03.031无人机飞行控制半实物仿真系统设计与实现吕永玺,屈晓波,史静平(西北工业大学自动化学院,陕西省飞行控制与仿真技术重点实验室,陕西西安710072 )摘要:为保证无人机飞行试验的安全性,提升无人机飞控系统设计的可靠性,自主研发了无人机飞行控制半实物仿真系统。
结合准确的无人机6自由度非线性数学模型和x P C实时系统模块模拟生成无人机飞行状态信息,根据地面站控制指令、传感器故障模注人指令解算获得不同飞行模式和飞行状态下的舵面偏转量,实现了实时系统闭环反馈控制,并驱动舵面偏转检验控制系统的响应速度。
该系统不仅能验证飞控系统的逻辑性和实时性,而且借助虚拟现实技术和航迹地图显示,具备在线整定控制律参数的功能。
该系统模块化程度高,相关硬件和软件对无人机平台和飞控计算机通用性广,依据多平台实验和多架次试飞的实验流程实用性强,为无人机飞控系统开发提供了切实可行、高效可靠的途径。
关键词:飞行控制;实时系统;虚拟现实;在线调参;故障注人中图分类号:V249文献标识码:A文章编号:1002-4956(2021)03-0153-05Design and realization of hardware-in-the-loop simulationsystem for UAV flight controlLYU Yongxi,〇U Xiaobo,SHI Jingping(S h a a n x i P r o v i n c e K e y L a b o r a t o r y o f Flight Control a n d S i m u lation T e c h n o l o g y, S c h o o l o f A u t o m a t i o n,N o r t h w e s t e r n Polytechnical University, X i'a n 710072, C h i n a)Abstract: T o e n s u r e the safety o f U A V flight test a n d i m p r o v e the reliability o f U A V flight control s y s t e m design,the U A V flight control h a r d w a r e-i n-t h e-l o o p s i m u l a t i o n s y s t e m is i n d e p e n d e n t l y d e v e l o p e d.T h e flight statei n f o r m a t i o n o f U A V is g e n e r a t e d b y c o m b i n i n g the a c c u r a t e 6-D O F n o n l i n e a r m a t h e m a t i c a l m o d e l o f U A V a n dx P C real-time s y s t e m m o d u l e. A c c o r d i n g to the g r o u n d station control c o m m a n d a n d s e n s o r fault m o d e injectionc o m m a n d, the deflection o f the control surfaces u nde r different flight m o d e s a n d flight states c a n b e obtained. T h ec l o s e d-l o o p f e ed b a c k control o f the real-time s y s t e m is realized, a n d the control surfaces are d r i v e n to test ther e s p o n s e s p e e d o f the control s y s t e m. T h e s y s t e m c a n not o n l y verify the logic a n d real-time p e r f o r m a n c e o f theflight control s y s t e m,b u t also h a s the function o f onli n e t u n i n g control l a w p a r a m e t e r s w i t h the h e l p o f virtualreality t e c h n o l o g y a n d track m a p display. T h e s y s t e m h a s a h i g h d e g r e e o f m o d u l a r i z a t i o n, a n d the related h a r d w a r ea n d s o f t w a r e are w i d e l y u s e d for the U A V p l a t f o r m a n d flight control c o m p u t e r.A c c o r d i n g to the e x p e r i m e n t a lp r o c e s s o f m a n y p l a t f o r m e x p e r i m e n t s a n d flight tests, the s y s t e m is practical, efficient a n d reliable for thed e v e l o p m e n t o f U A V flight control s y s t e m.Key words: flight control; real t i m e s y s t e m; virtual reality; o n line p a r a m e t e r a d j u s t m e n t; fault injection随着信息技术的发展和社会需求的增长,无人机 目标侦查与打击[4_5]等领域。
基于实时网络的半实物仿真系统控制方法马胜贤;孔晓玲;王立新;贾成功【期刊名称】《光电技术应用》【年(卷),期】2012(27)3【摘要】根据实时网络平台半实物仿真系统原理,构建了基于实时网络平台的半实物仿真系统。
阐述了基于实时网络平台的半实物仿真系统的工作流程,介绍了系统控制各模块的功能及控制方法,分析了基于实时网络平台的半实物仿真系统的控制方法的优势,并给出了平台下系统实现的主要源代码% According to the principle of the hardware-in-the-loop simulation system based on the real-time network, the platform of the simulation system is constructed. The working process of the hardware-in-the-loop simulation system based on the real-time network is described, the function and control method of the every mod⁃ule of the system are introduced, and the superiority of the method based on the read-time network is also analyzed. The source code under the windows platform is given.【总页数】4页(P14-17)【作者】马胜贤;孔晓玲;王立新;贾成功【作者单位】光电信息控制和安全技术重点实验室,河北三河065201;光电信息控制和安全技术重点实验室,河北三河065201;北京理工大学光电学院,北京100081;光电信息控制和安全技术重点实验室,河北三河065201【正文语种】中文【相关文献】1.基于组态王与MATLAB/Simulink的OPC实时通信构建半实物仿真系统 [J], 郑勇;彭皓林;卢冠达2.基于微机实时网半实物仿真系统数据通讯研究 [J], 李庭刚;谢廷毅;肖卫国3.一种基于反射内存实时网络的半实物仿真系统 [J], 高立娥;康凤举;王彦恺4.基于实时网络的激光制导武器半实物仿真系统设计 [J], 刘志国;王仕成;金光军5.基于USRP2的无线网络MAC协议半实物仿真系统设计与实现 [J], 李佳迅;张少杰;赵海涛;马东堂因版权原因,仅展示原文概要,查看原文内容请购买。
基于RT-LAB的PET中间级直流变换器半实物仿真平台设计刘京斗;李小均;吴学智;荆龙;王旭亮【摘要】隔离型双向DC/DC变换器是电力电子变压器(PET)的重要组成部分,其性能好坏将显著影响整个PET的功能.大功率隔离型双向DC/DC变换器多采用模块化串并联的方式实现.设计过程中存在控制复杂、研发周期长、测试困难等问题.本文基于RT-LAB搭建了包含模块化隔离型双向DC/DC变换器实际物理装置的半实物仿真平台,利用RT-LAB的控制功能及在线参数调试等特点对系统进行优化设计.实现了输入串联输出并联型DC/DC变换器均压均流控制策略.结果表明:该半实物仿真平台是研究模块化DC/DC变换器系统的有效方法.%Isolated bi-directional DC/DC converter is an important part of power electronic transformers,its performance will significantly affect the function of the entire Power Electronic Transformers(PET).Modular series-parallel structure is an effect way to realize high-power isolated bi-directional DC/DC converter,while the challenge of control complexity,testability and long developing cycle exist.A hardware-in-the-loop simulation platform is proposed and implemented on RT-LAB,which includes the physical device of the modular isolated bi-directional DC/DC converter and its control part.The system is optimized with RT-LAB control and online tuning function.The input-series-output-parallel DC/DC converter voltage and current equalization control strategy is realized.The results show that the hardware simulation platform is an effective method in studying the modular DC/DC converter system.【期刊名称】《北京交通大学学报》【年(卷),期】2017(041)002【总页数】6页(P117-122)【关键词】隔离型双向DC/DC变换器;半实物仿真;电力电子变压器;输入串联输出并联【作者】刘京斗;李小均;吴学智;荆龙;王旭亮【作者单位】北京交通大学国家能源主动配电网技术研发中心,北京100044;北京交通大学国家能源主动配电网技术研发中心,北京100044;北京电动车辆协同创新中心,北京100044;北京交通大学国家能源主动配电网技术研发中心,北京100044;北京交通大学国家能源主动配电网技术研发中心,北京100044【正文语种】中文【中图分类】TM46电力电子变压器(PET)具有电压变换、潮流控制和故障隔离等功能,是未来智能配电网的重要电气设备[1].PET通常具有三级结构,包括高压侧的模块化多电平变流器(Modular Multilevel Converter, MMC)、中间级隔离型双向DC/DC变换器和低压侧逆变器[2].由于PET的容量较大,中间级的DC/ DC变换器设计尤为关键,为降低难度,通常采用模块化串并联结构.目前,针对大容量模块化DC/DC变换器的研究大多处于电路拓扑、仿真验证和原理样机阶段,因此其控制算法并不成熟[3].由于隔离型双向DC/DC变换器拓扑结构复杂,开关器件多,通常采用数字信号处理器(DSP)和现场可编程门阵列(FPGA)进行控制,不仅编写程序耗费时间,而且无法实现在线参数调整.多个模块组成系统后,设计和调试的复杂性进一步提高,给控制系统的设计和验证带来很大的挑战.RT-LAB实时仿真系统具有计算精度高、实时性强和稳定性好等优点,已在国内外被广泛应用[4].文献[5]搭建了基于RT-LAB的3 MW风电变流器硬件在环仿真平台,结果表明:该平台所用控制算法对实际变流器同样适用.文献[6]利用RT-LAB半实物仿真平台验证了MMC的控制算法,结果表明:该平台是研究MMC的一种有效手段.文献[7]设计了基于RT-LAB的多端直流输电实验平台,实验结果表明:该系统能够实现多端系统的稳定运行.为缩短研发周期,本文作者设计了基于RTLAB实时仿真平台的模块化隔离型双向DC/DC变换器硬件在环仿真系统,以此来完成控制算法的开发.并在该半实物仿真平台上完成了两台DC/DC变换器输入串联输出并联(ISOP)的稳态和动态实验,结果表明:该平台可以为模块化DC/DC变换器研究开发提供有效途径.1.1 单台隔离型DC/DC变换器工作原理本文设计的半实物仿真平台所用模块化DC/ DC变换器主电路由4台双向隔离型DC/DC变换器组成,单台DC/DC变换器的电路拓扑如图1所示,包括一个半桥和两个H桥.在Buck模式下,通过控制H1桥上管的占空比调节输出电压,H2桥和H3桥都为50%占空比互补导通状态;在Boost模式下,H1桥的上管一直开通,下管一直关断,H2桥为50%占空比互补导通状态,H3桥通过桥臂间的移相实现升压.1.2 ISOP型DC/DC变换器控制策略在配电网应用场合下,由于输入电压高而输出电压低,故本文的DC/DC变换器采用ISOP结构[8],如图2(a)所示。
微电网半实物仿真平台的设计和实现
周冰;白建成;蔡蓉;童亦斌
【期刊名称】《电力电子技术》
【年(卷),期】2013(047)002
【摘要】提出基于dSPACE和实时数字仿真器(RTDS)的微电网半实物仿真平台,它由Matlab/Simulink和dSPACE 模拟仿真器、并网变流器、数字功放、RTDS 组成,实现了变流器向电网注入功率并稳定并网点电压的测试,试验证明了半实物仿真平台的正确性和可靠性.并且在负载突增的情况下仍能快速稳定并网点电压,消除了并网点电压的波动.该平台的建立有利于对微电网和变流器的建模和仿真,为研究微电网稳定性分析、功率调节和控制提供实时的仿真基础.
【总页数】3页(P38-40)
【作者】周冰;白建成;蔡蓉;童亦斌
【作者单位】北京交通大学,电气工程学院,北京 100044;北京交通大学,电气工程学院,北京 100044;ABB中国研究中心,北京 100015;北京交通大学,电气工程学院,北京 100044
【正文语种】中文
【中图分类】V242.3+1
【相关文献】
1.动车组制动控制系统半实物仿真平台的设计与实现 [J], 朱琴跃;吴桐;谭喜堂;刘榕雄;陶灵
2.无人机飞控系统半实物仿真测试平台的设计与实现 [J], 陆文骏
3.火电机组半实物仿真平台监控系统设计与实现 [J], 孙宇贞; 彭道刚; 于会群; 李芹; 徐春梅
4.基于机车半实物仿真平台应用层的设计及实现 [J], 张雁勋;赵贝;安志胜;王晋斌
5.基于LabVIEW和FPGA的半实物仿真平台的设计与实现 [J], 疏成成;苏建徽;施永;解宝;赖纪东
因版权原因,仅展示原文概要,查看原文内容请购买。

OPNET SITL半实物仿真北京怡嘉行科技有限公司SITL概述•SITL(System-in-the-Loop)是支持虚拟网络与真实设备进行协同仿真的一个功能•支持的系统连接方式包括:•真实-虚拟-真实(Real-Sim-Real)•虚拟-真实-虚拟(Sim-Real-Sim)•真实-虚拟(Real-Sim)SITL模块的应用及优点•测试网络硬件或软件的原型是否满足可扩展性,互操作性,以及对标准的符合程度•在虚拟网络中部署新协议,加入真实的流量,分析协议的性能•在原型网络中加入大量虚拟结点,评估系统的可扩展性•不必完全用实物建立实验环境,节省开支(1)连接•将现实设备连接到运行OPNET仿真的主机•连接方式为以太网(2)配置•运行OPNET仿真的主机可以同时连接多个现实设备,每个现实设备通过一块网络适配卡相连•在OPNET网络模型中为每个现实设备配置一个SITL网关结点(3)运行仿真•现实设备和仿真之间实时传递数据包•SITL模块在现实网络和虚拟网络之间转换数据包•真实->虚拟:SITL将网卡上的真实数据包翻译成OPNET虚拟数据包•虚拟->真实:SITL将虚拟数据包翻译成真实数据包•数据包从以太网帧头开始的内容都将保留•OPNET/SITL所支持的网络协议–Ethernet–IPv4 and IPv6(不支持fragmentation )–高层协议•ICMP –ping•ICMPv6 –ping, router solicitations, router advertisements•OSPFv2•RIPv1, v2•TCP•UDP•采用Real-Sim-Real连接方式时,所有应用层协议都支持•可以通过二次开发扩展SITL所支持的协议种类半实物仿真实例:RIP网络仿真•30个虚拟路由器•两台真实PC•一台真实的路由器•以一台真实设备和OPNET构建广域骨干网实验环境半实物仿真实例•仿真场景:1 路由表的建立过程2故障情况下路由重收敛3流媒体通过Real-Sim-Real仿真场景•30个虚拟路由器节点•两个SITL网关节点•虚拟路由器上运行RIP协议•与SITL网关相连的虚拟路由器接口地址分别为:192.168.1.20和192.168.2.20仿真场景1 无故障路由收敛20sNode_5Node_1615s Node_4、Node_710s node_65s Node_0•网络中路由器设置不同的rip开始时间,其余节点起始时间为50s(为了看到虚拟网络的路由是逐渐加入到真实路由器的路由表中)node_1和node_2之间流量的路由显示PC_1和PC_2之间互ping由于各个虚拟路由器开始运行的时间不一样,在真实路由器上学习到的路由条目也因此是逐渐增加的。
以“智能制造”为主攻方向,为我国发展成现代化工业强国描绘了清晰的路线[1]。
工业自动化是推动工业4.0的重要前提之一,也是必要因素,而工业自动化主要体现在机械制造和电气工程领域,导致众多机械和电气相关厂商纷纷开展了智能制造方面的研究。
目前全球众多优秀制造企业都开展了数字化工厂建设的实践。
FANUC公司实现了机器人和伺服电机生产过程的高度自动化和智能化;施耐德电气实现了电气开关制造和包装过程的全自动化。
国内也涌现出海尔、美的、东莞劲胜、尚品宅配等智能工厂建设的样板,如海尔佛山滚筒洗衣机工厂、尚品宅配实现了从款式设计到构造尺寸的全方位个性定制等。
但目前数字化工厂仍存在较多缺点[2]:(1)盲目购买自动化设备和自动化产线。
认为推进智能工厂就是自动化和机器人化;(2)尚未实现设备数据的自动采集和车间联网,导致依然存在大量信息化孤岛和自动化孤岛;(3)尚未具备快速建厂的技术条件,使得工厂建设过程周期漫长。
究其原因,数字化制造工厂系统复杂,工厂的完善仍需要较长时间。
而目前数字化工厂所存在的共性缺陷中、不能快速建厂是其最致命的缺陷,这是数字化工厂高度智能化导致工厂建设漫长与产品为抢占市场需要缩短上市周期之间的矛盾。
缩短智能工厂开发周期对提高产品市场占有率具有重要意义。
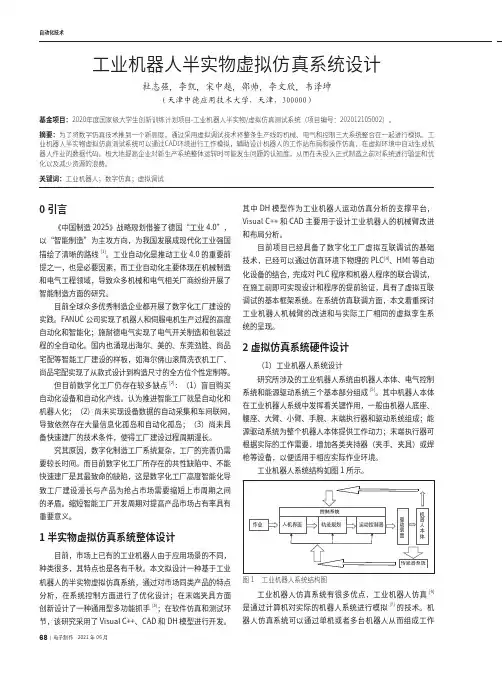
1 半实物虚拟仿真系统整体设计目前,市场上已有的工业机器人由于应用场景的不同,种类很多,其特点也是各有千秋。
本文拟设计一种基于工业机器人的半实物虚拟仿真系统,通过对市场同类产品的特点分析,在系统控制方面进行了优化设计;在末端夹具方面创新设计了一种通用型多功能抓手[3];在软件仿真和测试环节,该研究采用了Visual C++、CAD和DH模型进行开发。
目前项目已经具备了数字化工厂虚拟互联调试的基础技术,已经可以通过仿真环境下物理的PLC[4]、HMI等自动化设备的结合,完成对PLC程序和机器人程序的联合调试,在施工前即可实现设计和程序的提前验证,具有了虚拟互联调试的基本框架系统。
0 引言海上大型舰船平台是当今世界上具备强大综合战斗能力的平台[1],运用舰船仿真平台以辅助舰船设计,在舰船设计中具有重大意义。
常用的仿真平台可分为数字式仿真平台与半实物仿真平台。
相较于数字仿真平台大多以纯软件实现,常用于验证内在逻辑和机理,半实物仿真[2]重点验证实物接入,既考虑了模型的实际情况又易于实施,综合仿真置信度较高[3]。
因此,为了提高舰船仿真平台的置信度,采用半实物仿真的方案。
与纯软件仿真不同,半实物仿真除需具备软件仿真的功能外,还必须考虑实物仿真的接入与管理。
因此,半实物仿真系统与纯软件仿真系统在结构设计上存在差异。
目前,对仿真系统进行设计的方法主要有在现有的仿真软件平台(如MATLAB 等)上对系统进行建模并求解[4-5]、根据已有的仿真软件平台结构(如高层体系架构(HLA )[6-7]、分布式交互式仿真(DIS )[8-9]等)对系统进行设计、根据特定系统需求对系统进行设计(如基于Agent 的交互设计框架[10])。
而对于半实物仿真系统的设计,目前普遍采用的方法是通过将MATLAB[11-12]、HLA[13-14]、PLC[15-16]等软件仿真平台产生的数据接入到实物仿真系统或将实物仿真系统产生的数据接入到软件仿真平台来实现。
此方法虽然可以进行半实物仿真验证,但在舰船仿真平台上,由于平台需要实时获取舰载机的时间与位置信息,且其时间与位置需与真实世界保持一致,具有时空要求,此类设计方法无法适用于舰船仿真平台。
因基于Agent 的半实物仿真系统结构设计查宏文,朱明富(华中科技大学 人工智能与自动化学院,湖北 武汉430074)摘 要 :舰船仿真平台在舰船设计中具有重大意义,采用半实物仿真的方式对舰船平台进行仿真可以提高置信度,而舰船仿真平台对半实物仿真的时空特性具有要求,因此,对舰船仿真平台的结构设计提出需求。
本文提出一种基于Agent 的半实物仿真系统结构设计方案,以Agent 的方式对仿真对象进行描述,充分考虑舰载机等仿真领域对象的灵活选择与时空要求,将整个系统划分为具有时空同步、任务管理等功能的基础服务Agent 与可灵活接入系统并执行特定任务的领域Agent 两部分,并分别对其结构进行设计,进而用于舰船仿真平台的设计构造。
当代化工研究Modem Chemical Remearch123 2020・06数学研究风力发电系统半实物虚拟仿真教学平台的构建*王树文邱允王润涛*贾红芳孟祥丽(岭南师范学院广东524048)摘要:根据高等教育飽发展规划,半实物虚拟仿真实验教学平台的广泛应用是大势所趋.首先,进行了风力发电系统半实物虚拟仿真教学平台体系结构设计;其次,利用MATLAB SIMULINK平台搭建了自然风仿真模型、采用3D Studio Max开发了风力发电系统整体3D模型、在Unity的实时3D开发平台上构建风力发电的真实场景;最后,建立了PLC硬件系统以及外部控制平台.测试结果表明:风力发电系统虚拟仿真平台能够正确模拟真实系统的运行状态,通过外部硬件平台能够实现对虚拟餉风力发电系统仿真平台上的的桨距角、转子速度、转子角度、偏航输入扭矩、偏航速度和偏航角度进行实时控制.该平台的构建为风力发电系统的学习和研究提供了便捷手段.关键词:风力发电系统;虚拟仿真;教学平台;PLC中图分类号:TQ423.2文献标识码:AConstruction of Wind Power Generation System Semi-physical Virtual SimulationTeaching PlatformWang Shuwen,Qiu Yun,Wang Runtao*,Jia Hongfang,Meng Xiangli(Lingnau Normal University,Guangdong,524048)Abstracts In view of t he development p lan of h igher education,the wide application of s emi-physical virtual simulation teaching p latform is popular.Firstly,the architecture design of t he semi-physical virtual simulation teaching platform for wind p ower generation system is carried out. Secondly,the natural wind simulation model is built by using MATLAB SIMULINK p latform,the overall3D model of w ind p ower generation system is developed by3D Studio Max,and the real scene of w ind p ower generation system is built on Unity's real-time3D development p latform.Finally, the PLC hardware system and external control platform are established.The test results show that the virtual simulation platform for wind power generation system can correctly simulate the running state of t he real system,and through the external hardware p latform can realize real-time control of t he p itch Angle,rotor speed,rotor A ngle,yaw input torque,yaw speed and y aw A ngle on the virtual simulation p latform f or wind p ower generation system.The construction of t his platform provides a convenient means f or the study and research of w ind p ower generation system.Key words:wind p ower generation system;virtual simulation;teaching p latform;PLC根据国家教育部颁布的开展国家虚拟仿真实验教学项目的文件精神,将大力加强现代信息技术切实融入实验教学项目、拓展实验实践教学内容的广度和深度,延伸实践实验教学时间和空间,可见,虚拟仿真实验实践教学必将成为助推高等教育教学质量变轨超车的重要工具,此举措势在必行。