2019-2020年电磁悬浮系统课程设计报告.docx
- 格式:docx
- 大小:251.66 KB
- 文档页数:10
磁悬浮列车电气传动系统的设计与研究磁悬浮列车是一种分别运用磁力和气垫技术支持列车运行,减少接触摩擦,从而减少摩擦损失的高速列车。
在现代交通领域,磁悬浮列车已经被广泛应用。
其中,磁悬浮列车电气传动系统作为其重要的组成部分,对磁悬浮列车的稳定性和运行效率具有至关重要的影响。
一、磁悬浮列车电气传动系统的原理和优势磁悬浮列车电气传动系统主要由三个部分组成:电机、电容器和变流器。
利用电容器的无功电流来补偿负载变化,保证列车的稳定性,同时,变流器通过变换电压、电流和频率的方式来控制电机的转速,以实现对列车速度的调节。
与传统的车辆动力系统相比,磁悬浮列车电气传动系统的主要优势包括以下几点:1. 高性能磁悬浮列车电气传动系统的电机采用了大功率、高速电机,采用高级别功率半导体器件,具有高可靠性、高效率等优点,能够实现高速高效的列车行驶。
2. 系统化磁悬浮列车电气传动系统通过自动化控制,实时掌握列车的状态、位置、速度等关键信息,并及时反馈到车辆控制系统中,从而实现整个系统的高度集成化。
3. 节能环保磁悬浮列车电气传动系统减少了机械传动装置的摩擦损失,从而降低列车的能耗和碳排放。
二、磁悬浮列车电气传动系统的设计和研究磁悬浮列车电气传动系统的设计和研究主要涉及到以下几个方面:1. 电气元件的选择该系统关键部件包括电机、变流器、电容器等,其性能和先进程度直接影响到列车的功率、效率、安全性和使用寿命。
研究人员需要考虑列车的功率需求、过载能力、维修难易等因素,根据实际情况选择合适的电气元件。
2. 控制方法的研究磁悬浮列车电气传动系统的控制方法一般采用闭环反馈控制或者模式控制等方法。
闭环反馈控制是指利用反馈信息对列车的位置、速度、电流、电压等进行控制,来保证列车的控制精度和稳定性。
而模式控制则是对列车的控制状态进行分类,然后根据不同的状态采取不同的控制策略,以达到最佳控制目的。
3. 仿真与试验为了验证磁悬浮列车电气传动系统的性能,研究人员通常先进行仿真试验,根据理论推导出系统的数学模型,再通过计算机模拟实现对系统的性能进行评估和分析。

磁悬浮系统设计作者:李欣颀李云飞陈子川蔡兴宗杨梦玉来源:《科学导报·学术》2020年第49期摘要:采用微元分析方法构建下推式磁悬浮系统的数学解析式模型,构建下推式磁悬浮控制系统硬件平台。
由正交放置的霍尼韦尔3503传感器采集浮子磁场在其垂直分量上的磁场大小,线性转换成电信号经运算放大器放大后作为控制器STM32读取和写入控制信息,并用于数字滤波算法和运行控制算法后将计算数据作用于功率放大器件驱动螺旋线圈产生校正磁场。
使浮子处于动态平衡,达到预期控制效果。
1 系统模型设计一种多自由度,下推磁场磁悬浮系统。
控制目标是让浮子不借助除磁场以外的力,稳定悬停在指定空间位置,并在此控制基础上完成悬浮磁体对随机扰动的控制。
通过下推式磁悬浮磁源概念图,环形磁铁产生较大的谷形磁场。
使得浮子磁体在垂直方向上收到与重力相反的排斥力,因此物体悬浮的高度只能取决于环形磁铁的磁场的大小和浮子或浮子与浮子及其称重物质量决定。
在水平面上,浮子受到随机扰动,向远离中心位置运动。
受到不对称的磁场力斥力,吸引力大的一边会持续增加,吸引力小的一边会愈加减小,促进浮子磁体向远离中心位置运动;在磁场中还受到旋转力矩的作用,会使浮子发生翻转。
因而为了保障水平面上浮子磁体的稳定,必需投入新的微弱的磁场克服原先的运动状态。
使其在设定位置达到平衡。
Vizimag是利用有限元分析来仿真复杂磁场的软件,用Vizimag的软件来画出合成磁场分布,仿真出浮子受沿X方向的电磁力和垂直方向上的旋转力矩来。
如下所示。
可见,在不平衡位置,浮子磁体会收到纵向的力使浮子加速移动产生更大的位置误差,同时会受到转矩,使浮子磁体发生翻转。
2 硬件系统设计如图2所示,下推式磁悬浮的整个控制系统包括电源模塊、位置测量模块,功率放大模块和主控制器模块。
芯片的全部的电力供应来源于电源模块,本文设计三种板载电源,分别为12V、5V、和3.3V。
3.3V的电压供给STM32主控制器使用,5V的电压供给位置检测模块内芯片、驱动芯片使用,12V的电压供给驱动模块使用。
磁悬浮控制开题报告1. 引言磁悬浮控制是一种先进的控制技术,通过利用磁场相互作用力来实现物体悬浮和控制。
磁悬浮控制在工业、交通、医疗等领域具有广泛的应用前景。
本项目拟通过研究与开发一个基于磁悬浮控制的实验平台,探索其在物体悬浮和运动控制方面的潜力。
本开题报告将对项目的背景、目标与意义、方法与计划进行详细的阐述。
2. 背景磁悬浮技术是一种基于磁场相互作用力实现物体悬浮和运动控制的技术。
相比传统的机械悬浮和控制方法,磁悬浮技术具有快速响应、高精度和无摩擦等优势。
因此,磁悬浮技术在工业生产、交通运输和医疗设备等领域得到了广泛的应用。
然而,磁悬浮控制技术的研究与开发对于普通研究者来说往往较为困难,需要具备扎实的物理和控制理论知识。
因此,搭建一个基于磁悬浮控制的实验平台,为研究人员提供一个实践和学习的机会,对于促进磁悬浮技术的推广与应用具有重要意义。
3. 目标与意义本项目的目标是设计和开发一个基于磁悬浮控制的实验平台,通过搭建实验场景和控制系统,实现对物体的悬浮和运动控制。
具体目标包括:•搭建磁悬浮实验平台:设计并制作磁悬浮装置,提供可悬浮物体的平台。
•开发悬浮控制系统:设计并实现控制系统,包括传感器采集、控制算法和执行器控制。
•进行悬浮控制实验:通过调整控制参数,实现对物体的悬浮高度和运动轨迹的控制。
本项目的意义在于:•推动磁悬浮技术的研究与应用:通过搭建实验平台,提供研究人员一个学习和实践的机会,促进磁悬浮技术在各个领域的应用。
•培养学生的科研能力:通过参与项目实践,学生能够深入了解磁悬浮技术和控制理论,培养其科研能力和创新思维。
4. 方法与计划本项目的方法与计划主要分为三个阶段:准备阶段、实验搭建阶段和控制系统开发阶段。
4.1 准备阶段在准备阶段中,我们将进行前期工作的准备,包括: - 研究和了解磁悬浮技术的基本原理和相关控制算法; - 设计实验平台的整体结构和悬浮装置的设计; - 收集和整理相关的文献资料。
研究生自动控制专业实验地点:A区主楼518房间姓名:实验日期:年月日斑号:学号:机组编号:同组人:成绩:教师签字:磁悬浮小球系统实验报告主编:钱玉恒,杨亚非哈工大航天学院控制科学实验室磁悬浮小球控制系统实验报告一、实验内容1、熟悉磁悬浮球控制系统的结构和原理;2、了解磁悬浮物理模型建模与控制器设计;3、掌握根轨迹控制实验设计与仿真;4、掌握频率响应控制实验与仿真;5、掌握PID 控制器设计实验与仿真;6、实验PID 控制器的实物系统调试;二、实验设备1、磁悬浮球控制系统一套磁悬浮球控制系统包括磁悬浮小球控制器、磁悬浮小球实验装置等组成。
在控制器的前部设有操作面板,操作面板上有起动/停止开关,控制器的后部有电源开关。
磁悬浮球控制系统计算机部分磁悬浮球控制系统计算机部分主要有计算机、1711 控制卡等;三、实验步骤1、系统实验的线路连接磁悬浮小球控制器与计算机、磁悬浮小球实验装置全部采用标准线连接,电源部分有标准电源线,考虑实验设备的使用便利,在试验前,实验装置的线路已经连接完毕。
2、启动实验装置通电之前,请详细检察电源等连线是否正确,确认无误后,可接通控制器电源,随后起动计算机和控制器,在编程和仿真情况下,不要启动控制器。
系统实验的参数调试根据仿真的数据及控制规则进行参数调试(根轨迹、频率、 理想参数为止。
四、 实验要求1、 学生上机前要求学生在实际上机调试之前,必须用自己的计算机,对系统的仿真全部做完,并且 经过老师的检查许可后,才能申请上机调试。
学生必须交实验报告后才能上机调试。
2、 学生上机要求上机的同学要按照要求进行实验,不得有违反操作规程的现象,严格遵守实验室 的有关规定。
五、 系统建模思考题1、系统模型线性化处理是否合理,写出推理过程?合理,推理过程:由级数理论,将非线性函数展开为泰勒级数。
由此证明,在平衡点 (i 0,x 0)对系统进行线性化处理是可行的。
对式F(i,x) =K(°r 作泰勒级数展开,省略咼阶项可得:F(i,x) = F(i o ,X o ) + F i (i o ,X o )(i - i o ) + F x (i o , X o )(x- x °)F(i,x^F(i 0,X o ) K i (i-i 0) K x (x-X o )平衡点小球电磁力和重力平衡,有F (i ,x ) mg =0对F(i,x) =K(—)2求偏导数得:PID 等),直到获得较土 ,x ±0 |i ±0 ,x 之|i 土 ,x ±02完整描述式m dxy) =F ( i,x ) mg ,此系统的方程式如下: dtd 2xm —2 =K i (i -I 。
磁悬浮电机的设计与实现引言磁悬浮电机是一种基于磁悬浮技术和电动机原理相结合的先进电机。
与传统的机械轴承支撑电机不同,磁悬浮电机利用磁力使转子浮在空中,消除了摩擦损耗和机械磨损,从而提高了电机的效率和可靠性。
本文将介绍磁悬浮电机的设计原理和实现方法。
设计原理磁悬浮电机的设计原理基于磁力平衡和电力驱动。
首先,通过使用永磁体和电磁体产生的磁场相互作用,可以使转子悬浮在气隙中。
然后,通过改变电磁体的电流来调节磁场的强度,从而控制转子的位置。
最后,通过施加交变电流使转子旋转,实现电机的工作。
磁悬浮电机通常采用两种磁悬浮方式:永磁悬浮和电磁悬浮。
永磁悬浮电机通过使用稳定的永磁体来产生悬浮力,从而实现转子的悬浮和驱动。
电磁悬浮电机则通过使用电磁体来产生悬浮力,需要外部电源来提供悬浮力。
两种方式各有优点和适用范围,具体选择应根据实际应用需求进行。
设计步骤1. 确定设计要求在开始设计磁悬浮电机之前,需要确定设计要求,包括功率、转速范围、悬浮方式等。
这些要求将直接影响到电机的设计参数和性能。
2. 选取磁悬浮方式根据设计要求和应用需求,选择适合的磁悬浮方式。
永磁悬浮适用于小功率和高速应用,电磁悬浮适用于大功率和低速应用。
3. 选择磁悬浮材料根据悬浮方式选择合适的磁悬浮材料。
永磁悬浮电机通常采用永磁体材料,如永磁铁、钕铁硼等。
电磁悬浮电机可以选择软磁材料,如硅钢片等。
4. 设计磁悬浮系统设计磁悬浮系统包括磁悬浮轴承和磁悬浮电磁体。
根据转子的重量和转速范围,选择合适的磁悬浮轴承类型,如径向磁悬浮轴承、轴向磁悬浮轴承等。
设计磁悬浮电磁体时,需要考虑电磁体的尺寸、线圈参数等。
5. 设计控制系统设计控制系统是磁悬浮电机设计的关键。
控制系统需要实时监测转子位置和速度,并根据要求调整电磁体的电流,实现转子的悬浮和驱动。
常用的控制策略包括PID控制、模糊控制、自适应控制等。
6. 制造和调试在完成设计后,进行磁悬浮电机的制造和调试。
制造过程包括制造磁悬浮轴承、制造电磁体、组装电机等。
永磁电磁悬浮技术研究报告永磁电磁悬浮技术研究报告摘要:本研究报告对永磁电磁悬浮技术的发展历程、原理和应用进行了综合研究和分析。
通过对永磁电磁悬浮技术的核心理论和实际应用进行剖析,探讨了其在交通运输、能源以及医疗设备等领域的应用前景,并提出了进一步研究的建议。
一、引言永磁电磁悬浮技术作为一项新兴的悬浮技术,具有重要的科研和工程应用价值。
本研究报告旨在通过对永磁电磁悬浮技术发展的概述,深入分析其原理和应用案例,为相关研究人员和工程师提供技术参考和指导。
二、永磁电磁悬浮技术发展历程永磁电磁悬浮技术起源于20世纪初的欧洲和美国,经过多年的发展,取得了显著的研究成果。
最早期的研究集中在永磁悬浮的原理和稳定性方面,随着电子技术的发展和特殊材料的应用,悬浮系统的性能不断提高,使得永磁电磁悬浮技术得以进一步应用于实际工程中。
三、永磁电磁悬浮技术原理永磁电磁悬浮技术是通过利用永磁材料产生的恒定磁力和电流感应力的相互作用,实现物体在无接触的状态下悬浮于空中。
该技术的核心概念是利用永磁体提供持续的磁场,通过悬浮电流和磁力的相互作用来实现悬浮。
四、永磁电磁悬浮技术应用案例4.1 交通运输领域永磁电磁悬浮技术可应用于高速列车和轻型磁悬浮系统的研究和建设。
以中国的“复兴号”高速列车为例,其采用了永磁电磁悬浮技术,实现了列车的平稳悬浮和高速运行。
这种先进的技术不仅提高了列车的运行速度和安全性,还减小了对轨道和环境的损害,并为未来城市交通发展提供了新思路。
4.2 能源领域永磁电磁悬浮技术在能源领域的应用主要体现在发电机组的研究和设计中。
通过利用永磁电磁悬浮技术,可以减少机组的摩擦和能量损耗,提高能源转换效率。
此外,该技术还可以应用于风力发电装置的悬浮部分,提高风轮的稳定性和风能利用效率。
4.3 医疗设备领域永磁电磁悬浮技术在医疗设备领域的应用主要体现在医用图像诊断设备和手术器械的研发和应用中。
通过引入永磁电磁悬浮技术,可以实现对医疗设备的高精度定位和稳定悬浮,提高手术的准确性和安全性。
声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
学生签名:年月日新疆大学毕业论文(设计)任务书班级:自动化081 姓名:论文(设计)题目:磁悬浮球系统的建模与仿真设计专题:要求完成的内容: 1. 学习系统建模方法和熟练MATLAB语言。
2. 熟悉磁悬浮球控制系统的工作原理。
3. 建立磁悬浮球控制系统的数学模型。
4. 分析磁悬浮球控制系统的稳定性。
5. 磁悬浮球控制系统的控制器(PID,模糊)的设计。
6. 用SIMULINK建模进行仿真实验进行分析。
7. 编写毕业设计说明书。
发题日期:年月日完成日期:年月日实习实训单位:地点:论文页数:页;图纸张数:指导教师:教研室主任:院长:摘要磁悬浮技术是集电磁学、电子技术、控制工程、信号处理、机械学、动力学为一体的典型的机电一体化技术。
随着电子技术、控制工程、处理信号元器件、电磁理论及新型电磁材料的发展和转子动力学的进展,磁悬浮技术得到了长足的发展。
本实验平台可以使用多种控制器和控制方法,适用于相关人员的研究和实验工作。
研究和设计磁悬浮球控制系统实验平台是本文的主要工作,本文在分析磁悬浮球控制系统工作原理的基础上,设计了一套磁悬浮球控制系统实验平台。
本文着重介绍控制器的设计过程。
在此基础上,本文利用了MATLAB设计了基于计算机的磁悬浮PID传统控制和模糊PID控制器。
所研制的控制器软件设计方法简单、性能稳定、实时调试方便。
关键词:磁悬浮球控制系统;稳定性;传统PID控制器;模糊PID控制器ABSTRACTMagnetic Suspension is one of typical mechanics and electronics technology,which includes the electromagnetics, electron technology, control engineering, signaldisposal, mechanics and dynamics.As the electronic technology, control engineering, processing signal components, electromagnetic theory and the development of new electromagnetic material and the progress of the rotor dynamics, maglev technology got rapid progress. This experiment platform can use a variety of controller and the control method, apply to relevant personnel of research and experimental work.This thesis focuses on the research and design of Magnetic Suspension ball Control System testing platform. Based on analyzing of Magnetic Suspension ball Control system's working principle, the thesis designs a Magnetic Suspension ball Control System testing platform.The paper emphasizes the design process.On this basis, this paper use based on MATLAB design of magnetic levitation PID traditional computer control and fuzzy PID controller. The developed controller software design method is simple, stable performance, real-time debugging is convenient.Keywords: maglev ball control system;stability;the traditional PID controller;the fuzzy PID controller目录1 绪论 (5)1.1 磁悬浮技术综述 (5)1.1.1 前言 (5)1.1.2 磁悬浮方式的分类 (5)1.1.3 磁悬浮控制方法的现状与发展趋势 (5)1.2 课题的提出及意义 (6)1.3 本论文的工作及主要内容 (6)2 磁悬浮球系统组成及系统模型 (8)2.1 磁悬浮球系统组成 (8)2.2 磁悬浮球系统工作原理 (8)2.3 磁悬浮球系统的数学模型 (8)2.4 磁悬浮球系统闭环控制 (12)3 传统控制器的研究与设计 (13)3.1 引言 (13)3.2 控制器设计 (13)3.2.1 PID控制器基本控制规律 (13)3.2.1.1 比例控制器(P调节器) (13)3.2.1.2 积分控制器(I调节器) (14)3.2.1.3 微分控制器(D调节器) (15)3.2.1.4 比例-微分控制器(PD调节器) (15)3.2.1.5 比例-积分控制器(PI调节器) (16)3.2.1.6 比例-积分-微分控制器(PID调节器) (17)3.2.2 PID控制器的参数整定 (19)3.2.3 PID调节器参数的工程整定 (21)3.2.3.1工程实验法整定 (21)3.2.3.2 Ziegler-Nichols参数整定法 (22)3.3 磁悬浮球系统PID参数整定及系统仿真 (24)3.3.1 不加控制器时磁悬浮球系统及其系统仿真 (24)3.3.2 PID参数整定的步骤及系统仿真 (28)4 模糊PID控制器的设计 (32)4.1引言 (32)4.2模糊控制器简介 (32)4.2.1模糊控制的基本原理 (32)4.2.2 模糊控制器的结构 (32)4.3 模糊控制系统的设计 (34)4.3.1 模糊控制器的结构设计 (34)4.3.2 模糊控制器的基本设计 (35)4.3.3 模糊PID控制器结构及参数自整定原则 (36)4.3.4 模糊PID控制器的设计 (37)4.3.5 基于MATLAB的模糊PID控制系统的仿真研究 (39)5 总结与展望 (42)5.1总结 (42)5.2 今后的研究方向 (42)致谢 (43)1 绪论1.1 磁悬浮技术综述1.1.1 前言磁悬浮技术属于自动控制技术,它是随着控制技术的发展而建立起来的。
标准文案目录《德日高速磁悬浮列车》课题论文 (1)摘要: (1)一、磁悬浮列车的概述 (1)二、日本德国超高速磁浮铁路的比较 (2)1、超导原理比较[1] (2)2、主要技术特点比较 (4)3、悬浮特性比较 (5)4、能耗和造价经济分析 (5)三、小组分工: (6)参考文献: (7)《德日高速磁悬浮列车》课题论文摘要:自德国工程师赫尔曼·肯佩尔提出了电磁悬浮原理,磁悬浮技术的研究就在国际围如火如荼的进行着。
磁浮技术在交通方面的应用体现在高速磁悬浮列车的出现。
现阶段超高速磁浮技术主要有以以日本为代表的超导超高速磁浮铁路MLX 技术、德国常导超高速磁浮铁路TR技术。
本文主要介绍这两种技术的技术特点,分析他们的能耗等各方面性质,并提出我国下阶段的磁浮研究方向。
关键词:MLX 技术、TR 技术、电磁吸引式悬浮、侧壁电动式悬浮一、磁悬浮列车的概述很早以前,人们就希望列车能与轨道脱离接触,以解除轮轨车辆的振动与磨损带来的烦恼。
自20 世纪初德国工程师赫尔曼·肯佩尔提出了电磁悬浮原理,并于1934 年申请了磁悬浮列车的专利以来,人类一直在探索将这一原理应用到地面轨道交通的途径。
1970 年代以后,随着世界工业化国家经济实力的不断加强,为提高交通运输能力以适应其经济发展的需要,德国、日本、美国、加拿大、法国、英国等发达国家相继开始进行磁悬浮运输系统的开发。
由于磁悬浮列车是轨道上行驶,导轨与机车之间不存在任何实际的接触,故其几乎没有轮、轨之间的摩擦。
磁悬浮列车有其不可替代的优势:运行速度快,能超过500 千米/小时,运行平稳、舒适,易于实现自动控制;它以电为动力,不排出有害的废气,有利于环境保护;可靠性大、维修简便、成本低,可节省建设经费,其能源消耗仅是汽车的一半、飞机的四分之一;噪音小,当磁悬浮列车时速达300 公里以上时,噪声只有65 分贝,是一种名副其实的绿色交通工具。
正因为磁浮列车在交通方面有着如此的优势,国际上有关磁悬浮列车的研究正如火如荼地进行着。
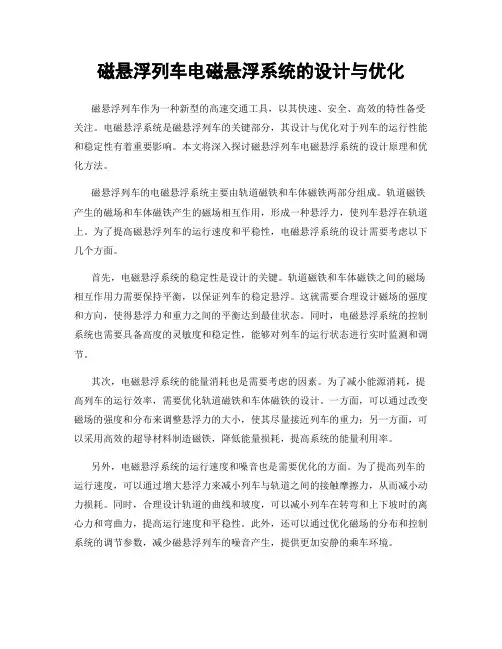
磁悬浮列车电磁悬浮系统的设计与优化磁悬浮列车作为一种新型的高速交通工具,以其快速、安全、高效的特性备受关注。
电磁悬浮系统是磁悬浮列车的关键部分,其设计与优化对于列车的运行性能和稳定性有着重要影响。
本文将深入探讨磁悬浮列车电磁悬浮系统的设计原理和优化方法。
磁悬浮列车的电磁悬浮系统主要由轨道磁铁和车体磁铁两部分组成。
轨道磁铁产生的磁场和车体磁铁产生的磁场相互作用,形成一种悬浮力,使列车悬浮在轨道上。
为了提高磁悬浮列车的运行速度和平稳性,电磁悬浮系统的设计需要考虑以下几个方面。
首先,电磁悬浮系统的稳定性是设计的关键。
轨道磁铁和车体磁铁之间的磁场相互作用力需要保持平衡,以保证列车的稳定悬浮。
这就需要合理设计磁场的强度和方向,使得悬浮力和重力之间的平衡达到最佳状态。
同时,电磁悬浮系统的控制系统也需要具备高度的灵敏度和稳定性,能够对列车的运行状态进行实时监测和调节。
其次,电磁悬浮系统的能量消耗也是需要考虑的因素。
为了减小能源消耗,提高列车的运行效率,需要优化轨道磁铁和车体磁铁的设计。
一方面,可以通过改变磁场的强度和分布来调整悬浮力的大小,使其尽量接近列车的重力;另一方面,可以采用高效的超导材料制造磁铁,降低能量损耗,提高系统的能量利用率。
另外,电磁悬浮系统的运行速度和噪音也是需要优化的方面。
为了提高列车的运行速度,可以通过增大悬浮力来减小列车与轨道之间的接触摩擦力,从而减小动力损耗。
同时,合理设计轨道的曲线和坡度,可以减小列车在转弯和上下坡时的离心力和弯曲力,提高运行速度和平稳性。
此外,还可以通过优化磁场的分布和控制系统的调节参数,减少磁悬浮列车的噪音产生,提供更加安静的乘车环境。
最后,电磁悬浮系统的安全性是不可忽视的。
为了保证列车的安全运行,电磁悬浮系统需要具备高度的可靠性和安全性。
在设计过程中,需要考虑不同的故障情况和风险因素,并采取相应的措施来减小故障的发生和影响。
同时,对电磁悬浮系统的监测和维修也需要重视,及时发现和排除潜在的问题,确保列车运行的安全和稳定。
磁悬浮报告一、磁悬浮的诞生利用磁力使物体处于无接触悬浮状态的设想是人类一个古老的梦,但实现起来并不容易。
因为磁悬浮技术是集电磁学、电子技术、控制工程、信号处理、机械学、动力学为一体的典型的机电一体化技术(高新技术)。
然而随着电子技术、控制工程、信号处理元器件、电磁理论及新型电磁材料的发展和转子动力学的进展,磁悬浮逐渐的变成了现实。
而具体的磁悬浮技术是起源于德国,在1922年德国工程师赫尔曼·肯佩尔就提出了电磁悬浮原理,并于1934年申请了磁悬浮列车的专利。
二、磁悬浮的基本原理:磁悬浮指的是一系列技术,它包括了借助磁力的方法悬浮,借助磁力的引导以及驱动等等,而磁悬浮的基本技术原理是来源于电磁感应效应,自从1831年法拉第在试验中观察到了电磁感应现象,即当通过一线圈回路的面积的磁通量发生变化时候,线圈回路中便会产生相应的感应电动势,而这个时候如果回路线圈是闭合的话,在回路中便会产生了相应的感应电流。
而法拉第电磁感应的条件概括为:变化的电流、变化的磁场、运动的稳恒电流、运动的磁铁、在磁场中运动的导体。
而经过了多次的实验,法拉第发现,回路中的感应电动势的大小与通过回路中的磁通量的变化成正比,感应电动式的方向有楞次定律决定,即:感应电动势产生的感应方向总是是感应电流磁场通过回路的磁通量,阻碍原磁通量的变化,其表达是如下:=-k t d d ϕε式中的ϕ为通过回路的磁通量,t 为时间,k 为比例系数,负号表示的是方向,而采用适当的单位比例系数K 将为1。
如果回路是N 匝串联,则磁通量的发生变化时,每匝线圈都将产生感应电动势,若通过每匝线圈的磁通量相同,则有:=-Nt d d ϕε 上式中假设每一匝的比例系数均为1,而线圈匝数为N 。
而磁悬浮技术就是在电磁感应技术的发展中产生了。
磁悬浮技术的系统,是由转子、传感器、控制器和执行器4部分组成,其中执行器包括电磁铁和功率放大器两部分。
假设在参考位置上,转子受到一个向下的扰动,就会偏离其参考位置,这时传感器检测出转子偏离参考点的位移,作为控制器的微处理器将检测的位移变换成控制信号,然后功率放大器将这一控制信号转换成控制电流,控制电流在执行磁铁中产生磁力,从而驱动转子返回到原来平衡位置。
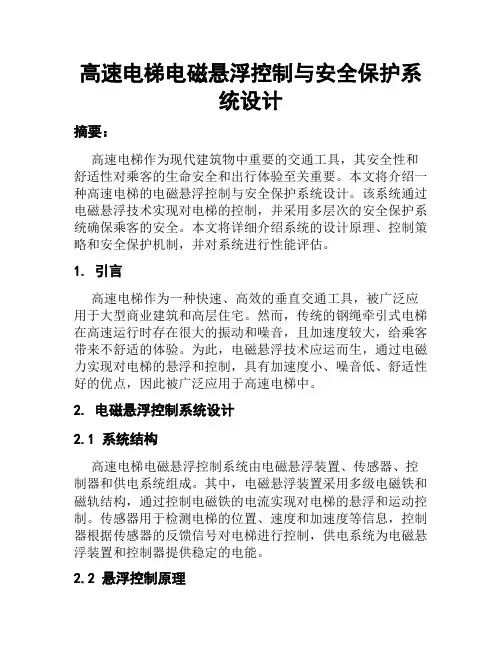
高速电梯电磁悬浮控制与安全保护系统设计摘要:高速电梯作为现代建筑物中重要的交通工具,其安全性和舒适性对乘客的生命安全和出行体验至关重要。
本文将介绍一种高速电梯的电磁悬浮控制与安全保护系统设计。
该系统通过电磁悬浮技术实现对电梯的控制,并采用多层次的安全保护系统确保乘客的安全。
本文将详细介绍系统的设计原理、控制策略和安全保护机制,并对系统进行性能评估。
1. 引言高速电梯作为一种快速、高效的垂直交通工具,被广泛应用于大型商业建筑和高层住宅。
然而,传统的钢绳牵引式电梯在高速运行时存在很大的振动和噪音,且加速度较大,给乘客带来不舒适的体验。
为此,电磁悬浮技术应运而生,通过电磁力实现对电梯的悬浮和控制,具有加速度小、噪音低、舒适性好的优点,因此被广泛应用于高速电梯中。
2. 电磁悬浮控制系统设计2.1 系统结构高速电梯电磁悬浮控制系统由电磁悬浮装置、传感器、控制器和供电系统组成。
其中,电磁悬浮装置采用多级电磁铁和磁轨结构,通过控制电磁铁的电流实现对电梯的悬浮和运动控制。
传感器用于检测电梯的位置、速度和加速度等信息,控制器根据传感器的反馈信号对电梯进行控制,供电系统为电磁悬浮装置和控制器提供稳定的电能。
2.2 悬浮控制原理高速电梯的悬浮控制是通过电磁铁产生的磁场力和电梯上的磁轨相互作用实现的。
当电磁铁通电时,产生的磁场力使电梯与磁轨之间产生吸引力或斥力,从而实现对电梯的悬浮和控制。
控制器通过调节电磁铁的电流来控制悬浮力的大小和方向,从而实现电梯的运动和停留。
3. 安全保护系统设计为确保乘客的安全,高速电梯电磁悬浮控制系统还需要配备多层次的安全保护系统,包括速度保护、载荷保护和防坠保护。
3.1 速度保护高速电梯在运行过程中,控制器需要实时监测电梯的速度,并根据预设的速度限制进行控制。
当电梯超过限定速度时,控制器将立即停止供电并触发紧急制动系统,以避免超速带来的危险。
3.2 载荷保护电梯在运行时,其悬浮力需要根据电梯上的载荷进行调整,以保持电梯的平衡和稳定。
磁悬浮演示装置设计设计报告毕业设计题目:磁悬浮演示装置设计院:电气信息学院专业:电子信息工程班级: 1101 学号: 25 学生姓名:余东升导师姓名:李延平完成日期: 2015年 6月 10日诚信声明本人声明:1、本人所呈交的毕业设计(论文)是在老师指导下进行的研究工作及取得的研究成果;2、据查证,除了文中特别加以标注和致谢的地方外,毕业设计(论文)中不包含其他人已经公开发表过的研究成果,也不包含为获得其他教育机构的学位而使用过的材料;3、我承诺,本人提交的毕业设计(论文)中的所有内容均真实、可信。
作者签名:日期:年月日毕业设计(论文)任务书题目:磁悬浮演示装置设计姓名余东升学院电气信息学院专业电子信息工程班级1101 学号201101030125指导老师李延平职称讲师教研室主任刘望军一、基本任务及要求:课题内容是以TI公司的Tiva C平台为基础实现一个磁悬浮实验演示装置,具体要求如下:1、搭建实验装置的实物平台;2、实现对磁铁的悬浮控制;3、磁平衡的控制参数可调;4、完成实物制作二、进度安排及完成时间:1、第一周至第二周:查阅资料、撰写文献综述和开题报告;2、第三周至第四周:毕业实习;3、第五周至第六周:各参数测试算法研究;4、第七周至第八周:完成硬件的设计及模型组装;5、第九周至第十一周:完成系统硬件电路的设计及调试;6、第十二周至第十三周:完成单片机程序的编写及调试;7、第十四周至第十五周:撰写设计说明书;8、第十六周:毕业设计答辩目录摘要 (I)Abstract (II)第1章概述 (1)1.1磁悬浮的研究背景 (1)1.2磁悬浮研究的现状 (1)第2章系统方案 (3)2.1 系统总体方案设计 (3)2.2 霍尔传感器 (3)2.3 信号处理方案 (4)2.4 线圈驱动器选型 (5)2.5 主控芯片选择 (5)第3章系统硬件设计 (7)3.1 主控模块设计 (7)3.2电源设计 (8)3.3 传感器电路设计 (8)3.4 控制线圈驱动模块设计 (8)3.5霍尔元件与控制线圈的安装 (9)第4章软件设计 (10)4.1 编程语言的选择 (10)4.2 主程序设计 (10)4.3 模块程序设计 (11)第5章调试与运行 (15)5.1 编程工具CCS的介绍 (15)5.2程序调试与下载 (16)5.3 PID调试与结果 (17)第6章结论与展望 (19)参考文献 (20)致谢 (21)附录程序 (22)磁悬浮演示装置设计摘要:磁悬浮系统是一种非线性,复杂、自然不稳定系统,其空控制性能的好坏直接影响磁悬浮的应用。
本系统所采用的磁悬浮装置是由控制器、电磁铁、涡流位移动器、电压/电流传感器、整流电路、功率放大器和悬浮机构(铁盘)等组成。
其示意图如图2-1所示。
三个相同的电磁铁固定在悬浮支架上,在每个电磁铁两侧对称平行的安装两个型号相同的位置传感器(为简便起见,图中每点只画了一个传感器),并且保证位置传感器的下平面和悬浮体的平面相平行,以使得传感器检测到的悬浮距离为真正的悬浮气隙长度。
悬浮铁盘位于磁铁下方,采用圆环的结构,这样就避免了悬浮体在水平位置上的偏移,大大减小了悬浮系统磁悬浮实验装置的闭环控制系统组成如图2-2所示。
电磁铁缠绕导线圈,铁磁体及其与悬浮体之间的气隙形成了闭合回路。
当电磁铁绕组中通过电流时,气隙内产生电磁场,从而会对悬浮体产生电磁吸力。
当三个电磁铁吸力之和大于悬浮铁盘重力时,铁盘上升,铁盘悬浮起来。
因此,控制电磁铁绕组中的电流大小,使其产生的电磁力和铁盘重力相等,铁盘就可以悬浮在空中,处于悬浮状态了。
但是,这种平衡是暂态的,由于电磁铁和悬浮体之间的电磁力大小与它们距离的平方成反比(下一章将进行推导),即距离越小作用力越大,距离越大作用力越小,所以该系统只要受到极微小的扰动,就会破坏这种平衡,导致铁盘掉下来,或者和电磁铁吸附到一起。
因此要使悬浮体实现稳定悬浮,就必须根据悬浮体的悬浮状态连续不断地调节磁场,这可以通过改变电磁铁线圈的电流来实现。
本系统采用涡流传感器来检测悬浮体偏移平衡位置的距离,将检测信号以电压的形式反馈给控制器,经过一系列的控制算法后,得到控制量,输出给功率放大器,功放控制电磁铁内部电流的大小,控制电流修正电磁铁中产生的电磁力,使电磁吸力和悬浮体重力相等,从而维持铁盘的悬浮位置稳定不变。
位移传感器是磁悬浮系统中的关键元素,它用来测量悬浮体与电磁铁之间气隙的长度,要想获得高精度的测量数据,就要求传感器有很高的灵敏度、分辨率以及反应速度。
虽然现在有很多的传感器可供我们选择,但是,还是受到很多限制,比如说大小、价格等方面。
磁悬浮交通系统设计及能效优化磁悬浮交通系统(Magnetic Levitation, Maglev)是一种使用磁力来使车辆离地行驶的交通工具。
与传统的轮轨接触方式相比,磁悬浮交通系统具有更好的平稳性、更快的速度和更低的能耗。
本文将探讨磁悬浮交通系统的设计原理及其能效的优化方法。
首先,磁悬浮交通系统的设计原理是基于磁悬浮力的运行方式。
该系统利用车辆和轨道之间产生的磁力相互作用,使车辆离地行驶。
在轨道上布置一系列的磁铁,产生恒定的磁场,而车辆则携带有相应的磁铁或电磁铁,通过与轨道上的磁场相互作用来实现悬浮。
为了使磁悬浮交通系统能够更高效地运行,对其能效进行优化是必要的。
以下是一些能效优化的方法:1. 减小空气阻力:由于磁悬浮交通系统的车辆离地行驶,空气阻力对其运行速度有较大影响。
因此,通过减小车辆前部和侧部的气动阻力来提高能效是一种常见的优化方法。
例如,通过改变车辆外形设计、布置空气动力学导流板等手段来减小阻力。
2. 降低磁悬浮力耗能:磁悬浮交通系统需要通过电磁或永磁来产生悬浮力。
为了提高能效,可以采用低能耗的永磁材料来替代传统的电磁铁。
此外,可以优化磁悬浮系统的控制算法,减少能量损耗。
3. 能量回收利用:磁悬浮交通系统在减速和制动时会产生大量的能量。
传统上将这些能量浪费在制动阻力上,但可以通过能量回收系统将其转化为电能进行再利用。
这种方式可以提高系统的能效,并减少对外部电力的依赖。
4. 路线和运行策略优化:通过对线路和运行策略进行优化,可以提高能效。
例如,避免车辆在上坡段运行,选择合适的行驶速度,确保能量的高效利用,减少能量浪费。
5. 采用清洁能源:考虑到磁悬浮交通系统的能效优化,使用清洁能源来供电是一个重要的方向。
通过使用太阳能、风能等可再生能源来为系统供电,可以降低对传统能源的依赖,减少环境污染。
综上所述,磁悬浮交通系统作为一种创新的交通方式,具有许多优势。
通过对其设计原理的理解和能效的优化,我们可以进一步提高其效能和可持续性。
磁悬浮列车车辆控制系统设计与优化第一章:引言磁悬浮列车作为一种新型的高速交通工具,受到了越来越多的关注。
其采用磁力浮起,减小地面摩擦,可达到较高的速度及较大的载重量。
而磁悬浮列车的车辆控制系统则是其重要的组成部分,它负责对车辆进行稳定控制和安全控制。
本文将深入探讨磁悬浮列车车辆控制系统的设计与优化。
第二章:磁悬浮列车车辆控制系统基本原理磁悬浮列车采用磁力悬浮技术,通过车辆底部的磁铁与导轨上的电磁铁相互作用产生磁力,使车辆从地面上悬浮起来,并且利用电力驱动车辆在导轨上高速运行。
磁悬浮列车车辆控制系统包括车辆稳定控制和列车运行安全控制两个方面。
2.1 车辆稳定控制车辆稳定控制是指车辆在高速运行过程中保持水平稳定、平稳行驶,并通过控制系统使车辆尽可能地消除颠簸和震动。
其主要包括转向、起动和制动多个方面的控制,从而确保在高速运行中车辆的安全性和舒适性。
2.2 列车运行安全控制列车运行安全控制包括对列车整体和局部运行状况的监测,如轴重、列车速率、温度等,以及对列车的速度、位置等参数进行监测、控制和管理,并及时采取措施,以保证列车运行的安全性和稳定性。
第三章:磁悬浮列车车辆控制系统设计车辆控制系统主要由硬件和软件两部分组成,硬件是指车辆上各种传感器、执行器等控制设备,软件则是指控制算法和运行程序。
3.1 硬件部分硬件部分是车辆控制系统的骨架,包括传感器、控制器和执行器等。
传感器可以实时检测车辆运动参数,如车速、轴重、车体倾斜角等;控制器则是根据传感器反馈的信息进行计算控制车辆的加速度、制动力等;执行器则是控制车辆运动的设备,实现车辆的加速、制动、转弯等操作。
3.2 软件部分磁悬浮列车车辆控制系统的软件部分主要由控制算法和运行程序组成。
控制算法是指根据传感器反馈的信息,计算车辆的控制量的算法,如车速控制算法、制动控制算法等;运行程序则是指控制系统内部控制逻辑的程序。
第四章:磁悬浮列车车辆控制系统优化优化车辆控制系统是为了在满足指定的性能要求的情况下,最大限度地提高其效率和安全性。
研究生课程考核试卷
科 目: 现代控制理论 教 师: 姓 名: 学 号: 专 业: 类 别: 上课时间: 考 生 成 绩: 卷面成绩 平时成绩 课程综合成绩
阅卷评语:
阅卷教师 (签名) 重庆大学研究生院制 现代控制理论课程设计报告 1 电磁悬浮系统课程设计报告 1.设计要求 简易电磁悬浮系统的物理模型如下图所示。其中电源提供高频交流电压从而使得电磁铁线圈流过高频交流电流,产生高频交变的电磁场,进而在金属小球表面产生涡流,涡流形成的电磁场与线圈产生的电磁场之间产生相互作用力。通过控制电磁铁线圈中流过的电流,使之产生的电磁力与金属球的重力相平衡,金属球则可稳定的在空中保持悬浮。电磁力与线圈电流i的平方成正比,与电磁铁和小球之间的距离x成反比,即
2Ki
Fh
其中K为电磁力系数。 假设系统的参数为M=0 g,K=0.0001,L=0.01H,R=1Ω,g=9.8m/ s2。当电流i=7A时,小球位于平衡点h=0.01m处,试求: (1)以线圈电压v为输入量,电磁铁和小球之间的距离x为输出量,通过近似线性化处理建立系统的状态空间表达式; (2)对系统作稳定性分析,判断小球能否位于平衡点; (3)假设系统的控制要求为:偏离平衡点后能够自动回到平衡点,其中稳定时间<0.5s、超调量<5。试设计带状态观测器状态反馈系统,并绘制模拟仿真图; (4)根据模拟仿真图,绘制系统综合前后的响应曲线,判断系统在外加扰动的情况下小球能否回到平衡点。 现代控制理论课程设计报告
2 2.系统分析与设计 设控制对象处于悬浮的平衡位置,电磁铁绕组上的电流为i,当它对控制对象产生的吸力F和控制对象的重力Mg相平衡时,控制对象将处于一种平衡状态,静止在该位置上。 假设在平衡位置悬浮体受到一个向下的扰动,悬浮体就会偏离其平衡位置向下运动,此时传感器检测出悬浮体偏离其平衡位置的位移并将位移相对应的电压输出至控制器,控制器将这一位移信号变换为控制信号,功率放大器又将该控制信号变换为控制电流。相对于平衡位置,此时的控制电流增大,因此,电磁铁的吸力F变大了,从而使控制对象返回到原来的平衡位置。 如果控制对象受到一个向上的扰动并向上运动,此时控制器使得功放的输出电流减小,电磁铁的吸力F变小了,控制对象也能返回到原来的平衡位置。因此,不论控制对象受到向上或向下的扰动,只要在控制器的控制下相应地及时改变控制电流的值,控制对象始终能处于稳定的平衡状态。 控制系统组成如图2.1所示。
图2.1 磁悬浮控制系统组成 2.1状态空间表达式 1)求原系统的状态空间表达式 由题中条件可以得到原系统KVL的如下关系式: diviRLdt
当系统稳定时,即小球悬浮静止时有: 2Ki
FMgh
取向下为正方向,a为小球向下的加速度,对小球在竖直方向受力分析: 现代控制理论课程设计报告 3 dvMgFMaMdt
其中: 22dxdvdx
vdtdtdt,
由于模型为非线性化系统,结构较复杂,先对上式进行近似线性化处理,在点0i=7A,h=0.01m处用泰勒级数展开,忽略二阶及二阶以上项,有:
2200002
2KiKiKiFiixhhhh
将数值带入(4)计算得: 0.980.1449Fix 整理上述表达式得:
1(0.14490.98)1()xvvMgixMiviRL
&&&
取输入量v,输出量x,状态变量1xxt,2xvt,3xit,代入原式可得: 1221333
9802.829.4-100100xxxxxxxu
&&&
可以得到系统的能控标准型状态空间表达式为:
112233123
010098002.8000100100100xxxxuxxxyxx
&&&
其中: 01098002.800100A 00100B
100C 0D 现代控制理论课程设计报告 4 2)系统稳定性分析 由李雅普诺夫第一法,渐近稳定的充要条件是A的特征值均有负实部。 109802.800100ssIAss
2(100)980100)sIAsss(
32100980980000sss
解得:
123
100980980sss
由特征值判断,所以该系统不稳定,经过微小扰动后,小球不能位于平衡点。
2.2状态反馈与状态观测器设计 1)判断原系统的能控和能观测性
200280[] 0280280001000100001000000cQBABAB
3crankQ
故该系统完全可控,闭环极点可任意配置。
210001098012.8oCQCACA
3orankQ
故该系统可观测,状态观测器存在。
2)状态反馈设计 原系统无开环零点,所以设计的闭环系统的动态性能完全由闭环极点所决定。由题要求其中稳定时间<0.5s、超调量<5。 希望的3个闭环极点这样安排:选择一对主导极点s1和s2另外一个极点s3
远离这两个极点。将原闭环系统近似成只有主导极点的二阶系统。利用典型二阶现代控制理论课程设计报告 5 系统超调量和调节时间公式: 2-1-%100%5%e
35%0.5snts
解得: n0.7078.487,
取n0.70710,则主导极点1,2s与3s选择如下:
1,27.077.07sj
3100s 希望的闭环特征多项式为 23210014.14100114.14151410000ssssss
令代设状态反馈矩阵为: 123Kkkk
则闭环特征多项式为 32
3213(100100)(980280)2809800098000sIABKskskskk
令上述两特征多项式相等,解得: 123
435.20438.90710.1414kkk
则状态反馈阵为435.20438.90710.1414K
3)状态观测器设计 取全维观测器,令观测器的反馈矩阵为: 123T
Gggg
则观测器的特征多项式为: 32
11223100980100980001002.8sIAGCsgsggsgg
为使观测器状态变量尽快趋向原系统状态变量,取观测器极点离虚轴距离比闭环系统希望极点的位置大2~3倍。则选择极点为-100、-3、-3。 现代控制理论课程设计报告 6 希望的特征多项式为 2321003106609900sssss
令上述两特征多项式相等得: 123
69890ggg
则全维观测器矩阵为: 69890TG
整理得:
123
ˆ61006ˆˆˆˆ902.80989ˆ001001000xxxuyx
&&&
2.3系统连线图 由状态空间方程得原系统的接线图如图2.2所示。
图2.2 原系统的连接线 由以上得到全维状态观测器为:
123
ˆ61006ˆˆˆˆ902.80989ˆ001001000xxxuyx
&&&