分布式温室控制系统
- 格式:doc
- 大小:29.00 KB
- 文档页数:8
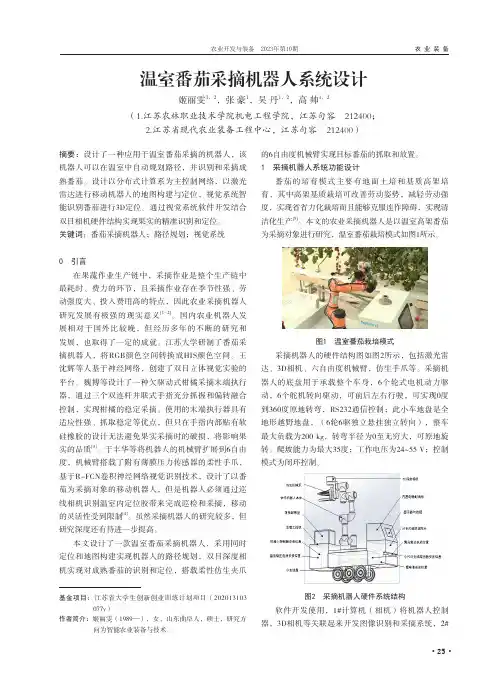
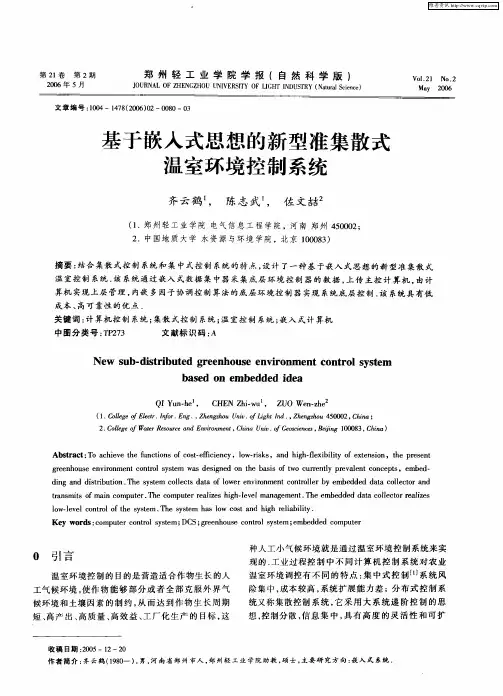
温室番茄采摘机器人系统设计姬丽雯1,2,张 豪1,吴 丹1,2,高 帅1,2(1.江苏农林职业技术学院机电工程学院,江苏句容 212400; 2.江苏省现代农业装备工程中心,江苏句容 212400)摘要:设计了一种应用于温室番茄采摘的机器人,该机器人可以在温室中自动规划路径,并识别和采摘成熟番茄。
设计以分布式计算系为主控制网络,以激光雷达进行移动机器人的地图构建与定位,视觉系统智能识别番茄进行3D定位。
通过视觉系统软件开发结合双目相机硬件结构实现果实的精准识别和定位。
关键词:番茄采摘机器人;路径规划;视觉系统0 引言在果蔬作业生产链中,采摘作业是整个生产链中最耗时、费力的环节,且采摘作业存在季节性强、劳动强度大、投入费用高的特点,因此农业采摘机器人研究发展有极强的现实意义[1-2]。
国内农业机器人发展相对于国外比较晚,但经历多年的不断的研究和发展,也取得了一定的成就。
江苏大学研制了番茄采摘机器人,将RGB颜色空间转换成HIS颜色空间。
王沈辉等人基于神经网络,创建了双目立体视觉实验的平台。
魏博等设计了一种欠驱动式柑橘采摘末端执行器,通过三个双连杆并联式手指充分抓握和偏转融合控制,实现柑橘的稳定采摘。
使用的末端执行器具有适应性强、抓取稳定等优点,但只在手指内部贴有软硅橡胶的设计无法避免果实采摘时的破损,将影响果实的品质[3]。
于丰华等将机器人的机械臂扩展到6自由度,机械臂搭载了附有薄膜压力传感器的柔性手爪,基于R-FCN卷积神经网络视觉识别技术,设计了以番茄为采摘对象的移动机器人,但是机器人必须通过巡线相机识别温室内定位胶带来完成巡检和采摘,移动的灵活性受到限制[4]。
虽然采摘机器人的研究较多,但研究深度还有待进一步提高。
本文设计了一款温室番茄采摘机器人,采用同时定位和地图构建实现机器人的路径规划,双目深度相机实现对成熟番茄的识别和定位,搭载柔性仿生夹爪的6自由度机械臂实现目标番茄的抓取和放置。
1 采摘机器人系统功能设计番茄的培育模式主要有地面土培和基质高架培育,其中高架基质栽培可改善劳动姿势,减轻劳动强度,实现省省力化栽培而且能够克服连作障碍,实现清洁化生产[5]。
大连大学本科毕业论文(设计)开题报告论文题目:农业大棚温湿度监控系统的设计学院:信息工程学院专业班级:自动化122班学生姓名:***指导教师:***2015年02月15日填一.选题依据1.论文题目农业大棚温湿度监控系统的设计2.研究领域嵌入式系统3.论文工作的理论意义和应用价值目前,我国正处于从传统农业到优质高效高产的现代化农业转化的新阶段,而大棚作为现代化农业的产物,在广大的地区得到应用。
随着科学技术的发展,农业和科学越来越密不可分,而现代化农业更是离不开科学对环境的控制,而农业大棚温湿度监控系统是实现农业大棚生产管理自动化和科学化的基本保障。
根据各种农作物的生长规律,通过温湿度监控系统控制其生长环境,达到农作物能在不适合其生长的反季节中能够获得比其在外界环境下更高效高产和优质的栽培目的。
由于温室大棚能够满足消费人群的质量要求,能够减轻种植业的风险,能够生产反季节农作物和使得大棚技术得到普及等优点,所以温室大棚数量不断增多,对于农业温室大棚来说,最重要的一个管理因素是温湿度控制。
当温湿度太高或者太低时,农作物就不适合生长,所以要将温湿度始终控制在适合农作物生长的范围内。
传统的温度控制是在温室大棚内部悬挂温度计,工人依据读取的温度值来调节大棚内的温度。
这样仅靠人工控制的方法既耗人力,又容易发生差错,更不易管理;而且随着农业产业规模的提高,对于数量较多的大棚,传统的温度控制措施就显现出很大的局限性。
为此,在现代化的农业大棚管理中温湿度监控系统的设计可以很好的控制农业大棚温湿度,适应生产需要。
4.目前研究的概况和发展趋势国外对温室环境控制技术研究较早,始于20世纪70年代。
先是采用模拟式的组合仪表,采集现场信息并进行指示、记录和控制。
80年代末出现了分布式控制系统。
目前正开发和研制计算机数据采集控制系统的多因子综合控制系统。
现在世界各国的温室控制技术发展很快,一些国家在实现自动化的基础上正向着完全自动化、无人化的方向发展。

智能农业温室大棚管理系统项目计划书一、项目背景近年来,农业温室基础设施发展迅速,但是在自动监控方面仍存在着诸多问题。
温室监控区域较大,需要大量的传感器节点构成大型监控网络,通过各种传感器采集诸如温度、空气湿度、光照度、土壤湿度、EC值、pH值等信息,实现自动化监控。
传统温室监测与控制系统多采用有线连接,布线复杂,往往造成温室内线缆纵横交错、使用不便、安装维护困难、可靠性差等问题。
无线传感器技术被认为是满足温室应用需求且代替有线连接的最好方式。
惠企物联科技结合最新的ZIGBEE无线技术,将传感器整合到无线传送网络中:通过在农业大棚内布置温度、湿度、光照、等传感器,对棚内环境进行检测,从而对棚内的温湿度,光照等进行自动化控制。
通过更加精细和动态监控的方式,来对农作物进行管理,更好的感知到农作物的环境,达到“智慧”状态,提高资源利用率和生产力水平。
二、现存问题⌝首先是成本较高。
一般来讲,一套智能化的控制系统成本主要包括硬件成本、运行成本和维护成本。
硬件成本包括各仪器仪表、通信线缆等。
整个系统也不能自由组合或者裁剪应用于不同的对象,使得难以得到推广和普及。
同时,由于系统复杂、布线繁多、故障率高而且使得故障后的维修成本极大。
另外,系统庞大造成的运行成本也不是一笔小费用。
⌝其次是布线复杂。
温室中有大量分散的传感器和执行机构,这些设备可能随着作物的改变而进行调整,同时错综复杂的线缆也需要重新铺设,工作量较大。
为了科学、合理地实现大面积温室环境参数的自动检测与控制,电子检测装置和执行机构的设置不仅数量大而且分布广,连接着各个装置与机构的线缆,也因此纵横交错。
当温室内生产的果蔬作物更替时,相应的电子检测装置和执行机构的位置常常需要调整,连接着各个装置与机构的线缆有时也需要重新布置。
这不仅增大了温室的额外投资成本和安装与维护的难度,有时也影响了作物的良好生长。
⌝第三,故障解决难。
当数据无法正常接收时,检查人员不知道是线路问题还是节点故障。
蔬菜大棚温湿控制器设计(毕业设计完整版)河南理工大学毕业设计(论文)说明书大棚温度湿度控制器设计摘要:温室是蔬菜大棚生产中必不可少的设施之一,不同种类蔬菜对温度及湿度等生长所需条件的要求也不尽相同,本设计就是控制大棚的温湿度,为它们提供一个良好的生存环境,给我们带来巨大的经济效益。
关键词:传感器、温湿度、控制电路、温度报警电路Abstract: Greenhouse production of greenhouse vegetables are an essential facilities, different types of vegetables, such as temperature and humidity on the growth of the necessary requirements are not the same, the design is to control the greenhouse temperature and humidity, to provide them with a goodthe living environment, has brought us huge economic benefits.Key words: sensors, temperature and humidity, control circuit, temperature alarm circuit12河南理工大学毕业设计(论文)说明书1 引言随着改革开放,特别是90年代以来,我国的温室大棚产业得到迅猛的发展,以蔬菜大棚、花卉为主植物栽培设施栽培在大江南北遍地开花,随着政府对城市蔬菜产业的不断投入,在乡镇内蔬菜大棚产业被看作是21世纪最具活力的新产业之一。
温室是蔬菜等植物在栽培生产中必不可少的设施之一,不同种类的蔬菜对温度及湿度等生长所需条件的要求也不尽相同,为它们提供一个更适宜其生长的封闭的、良好的生存环境,从而可以通过提早或延迟花期,最终将会给我们带来巨大的经济效益。
系(院)专业班级学生姓名学号指导教师职称独创声明本人郑重声明:所呈交的毕业设计(论文),是本人在指导老师的指导下,独立进行研究工作所取得的成果,成果不存在知识产权争议。
据我所知,除文中已经注明引用的内容外,本设计(论文)不含任何其他个人或集体已经发表或撰写过的作品成果。
对本文的研究做出重要贡献的个人和集体均已在文中以明确方式标明。
本声明的法律后果由本人承担。
作者签名:二〇一二年六月毕业设计(论文)使用授权声明本人完全了解滨州学院关于收集、保存、使用毕业设计(论文)的规定。
本人愿意按照学校要求提交学位论文的印刷本和电子版,同意学校保存学位论文的印刷本和电子版,或采用影印、数字化或其它复制手段保存设计(论文);同意学校在不以营利为目的的前提下,建立目录检索与阅览服务系统,公布设计(论文)的部分或全部内容,允许他人依法合理使用。
(保密论文在解密后遵守此规定)作者签名:二〇一二年六月基于PLC的温室大棚摘要讨论了在温室控制中引入PLC技术构成分布式控制系统的方法,详细介绍了系统的特点、组成、硬件设计、实时动态监控系统及通信问题。
分布式的控制结构,使各子系统相对独立,管理与控制功能分开,易于实现群控化管理,提高了系统的可靠性,且易于扩展。
系统成本低廉,性能稳定,通用良好,符合中国国情,具有广泛的应用前景。
关键词:PLC;传感器;控制器;程序设计;温室大棚The Green House Design for PLCAbstractAutomation is the inevitable trend of development for the future, not only the work and life. The programmable controller is referred to as PLC, PLC reliability, environmental adaptability, versatile, easy to use, simple maintenance, PLC application is rapidly expanding. The early PLC, where the relay can be used. PLC today can almost be said to those who need to control the system will need to PLC. The design is to write the PLC program by setting greenhouse control, reduce labor, increase production efficiency, automate!Key words: PLC; sensors; controllers; program design目录第一章绪论1.1 课题背景 (4)1.2 课题研究的意义 (4)1.3 温室环境的主要特点 (4)1.4 课题的主要研究工作 (5)1.5 PLC的现状 (5)第二章基于PLC设计的整体方案2.1硬件整体设计方案 (6)2.2软件整体设计方案 (6)第三章系统设计3.1 设计的总体目标 (6)3.2 设计的控制原则 (7)3.3 设计的控制方案 (7)3.4 控制系统硬件组成 (7)3.4、1 PLC的选择 (8)3.4、2 PLC机型和容量的选择步骤与原则 (8)3.5 传感器的选择 (11)3.6 信息采集系统 (12)3.7 执行机构 (14)第四章软件部分4.1 梯形图4.2 指令表结论参考文献谢词第一章绪论前言智能温室系统是近年来逐步发展起来的一种资源节约型高效设施农业技术,它是在普通日光温室的基础上,结合现代化计算机自控技术、智能传感器技术等高科技手段发展起来的。
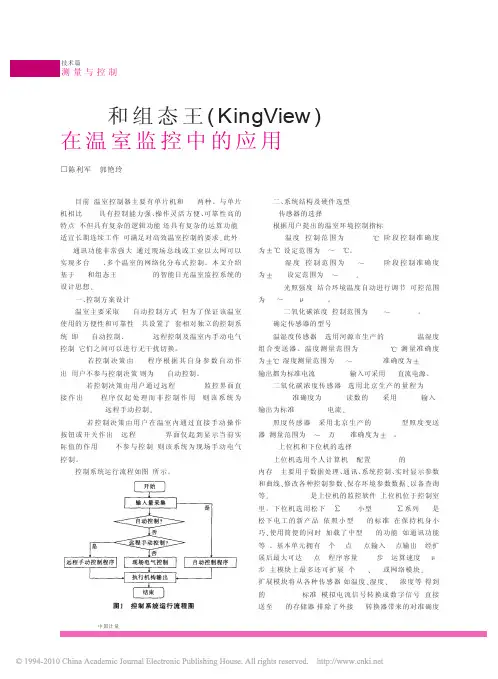
技术平台基于PLC的智能温室控制系统设计温俊霞 (宁夏工商职业技术学院,宁夏 银川 750021)摘 要:针对温室中环境自动控制程度较差的现状,通过分析温室内环境因素对植物的影响,设计了基于PLC的智能温室控制系统。
本系统的硬件主要由PLC、上位机和传感变送器构成,用来检测和控制温室内部环境参数的变化量。
本系统上位机监控软件使用组态王6.55编写,并通过与PLC的通信,能够对温室内部环境的实时监控及数据的显示与报警。
下位机软件选用松下的FPWINGR 开发,在仿真中取得了良好的结果,实现了给作物提供良好生长环境的目标。
本系统操作简单,可靠性强,适应当前现代农业的 需求。
关键词:PLC;实时监控;自动控制;现代农业本文研究的智能温室控制系统,选用松下的PLC 为智能温室的核心控制器件,与旧式温室相比,本设计能够进一步提高农作物的生产水平,保证作物的正常生长发育,提高作物合格率,在保证经济效益的前提下,更人性化地减少了管理者的工作时间,节约投入资本,适合广泛应用。
1 系统总体设计方案1.1 控制系统分析通过对温室内环境要点分析,具有非线性、分布式参数、时变性等特点。
由于室内的面积比较大,所以室内各项物理因素不均且随环境分布不断变化。
比如二氧化碳浓度,一般离植物较远的地方的浓度会比较高,垂直方向上的位置不同,其参数也是不同的。
农作物在生长发育的不同阶段内,它自身合成有机物的能力,以及吸收土壤中的水分无机盐等物质的能力都是不同的,因此,该系统是一个需要随数据变化量进行合理调控的时变性系统。
1.2 控制系统设计该控制系统主要由四个部分组成:温度控制系统、湿度控制系统、光照强度控制系统和CO2浓度控制系统。
每个控制系统下的传感元件能够对应一项温室内部作物生长环境的基础参数,对这项参数进行一个实时的监控,并完成参数的采集。
利用微机与PLC组合成系统的方式,建立控制系统,针对温室内环境的参数变化量,调控整个温室内外的执行机构,让它们有目的性地改变温室内环境,达到栽培作物正常的生长减少窃电行为的出现。
智能农业大棚智能温室手册第一章智能农业大棚概述 (3)1.1 智能农业大棚的定义与发展 (3)1.2 智能农业大棚的优势与应用 (3)1.2.1 优势 (3)1.2.2 应用 (4)第二章智能温室系统组成 (4)2.1 环境监测系统 (4)2.1.1 温度监测 (4)2.1.2 湿度监测 (4)2.1.3 光照监测 (5)2.2 自动控制系统 (5)2.2.1 执行设备 (5)2.2.2 控制器 (5)2.2.3 通信设备 (5)2.3 数据分析与决策系统 (5)2.3.1 数据存储 (5)2.3.2 数据分析 (5)2.3.3 决策模型 (6)第三章环境监测技术 (6)3.1 温湿度监测技术 (6)3.2 光照监测技术 (6)3.3 土壤监测技术 (6)第四章自动控制技术 (7)4.1 自动灌溉系统 (7)4.1.1 系统概述 (7)4.1.2 系统组成 (7)4.1.3 系统特点 (7)4.2 自动通风系统 (7)4.2.1 系统概述 (7)4.2.2 系统组成 (7)4.2.3 系统特点 (8)4.3 自动施肥系统 (8)4.3.1 系统概述 (8)4.3.2 系统组成 (8)4.3.3 系统特点 (8)第五章数据采集与传输 (9)5.1 数据采集设备 (9)5.2 数据传输技术 (9)5.3 数据存储与管理 (9)第六章智能温室作物种植 (10)6.1 作物生长模型 (10)6.3 作物营养管理 (11)第七章智能温室环境调控 (11)7.1 环境参数设定 (11)7.1.1 温度设定 (11)7.1.2 湿度设定 (11)7.1.3 光照设定 (11)7.1.4 二氧化碳浓度设定 (11)7.2 环境调控策略 (12)7.2.1 自动控制系统 (12)7.2.2 能源管理 (12)7.2.3 数据分析与优化 (12)7.3 环境预警与应急处理 (12)7.3.1 预警系统 (12)7.3.2 应急处理 (12)第八章智能温室能源管理 (12)8.1 能源消耗分析 (12)8.2 能源优化配置 (13)8.3 能源节约措施 (13)第九章智能温室安全与防护 (14)9.1 安全防护措施 (14)9.2 火灾报警系统 (14)9.3 防盗与监控系统 (14)第十章智能温室项目管理 (15)10.1 项目规划与设计 (15)10.1.1 需求分析 (15)10.1.2 设计方案 (15)10.1.3 技术选型 (15)10.2 项目实施与监控 (15)10.2.1 项目进度管理 (16)10.2.2 质量管理 (16)10.2.3 成本控制 (16)10.2.4 风险管理 (16)10.3 项目验收与维护 (16)10.3.1 项目验收 (16)10.3.2 运营培训 (16)10.3.3 运营维护 (16)10.3.4 持续优化 (16)第十一章智能温室发展趋势 (17)11.1 技术创新与发展 (17)11.2 政策支持与市场前景 (17)11.3 智能农业大棚产业布局 (17)第十二章智能农业大棚案例分析 (18)12.1 典型案例分析 (18)12.3 发展潜力与挑战 (19)第一章智能农业大棚概述科技的不断发展,农业领域也迎来了新的变革。
安擞农业科学,2OO2,30(1):7—10 Jomm]0f A Scieno ̄
棚室环境智能控制系统的研究 扬枢 )葛继忠 赵世付 (”台肥工业大学计算机与信息学院_A肥 司;’ 髓县承科局) 捕薹提出了一种棚室环境控制系统新的实现方法。谊控制系统采用分布式蛄构、智能化技术,包括模糊拉.I算法、身母断 技术、特感器的“即插即甩”技术等;可实现温室环境各要素的自动监控。 美量词温室环境;分布式系统;智能化技术;模糊控制
The 0ⅡⅫ棚l哪C:entrolSymm 0fGreeahet ̄Envlemmeat Yl蝉Shuet al(The Tec]mok ̄gy Univemity ofH出, 230O22) Abreact The T 『岫 ofI i the o0n帅I symem 0f ee 椰昱e帅 聊m州WaB pet ̄wazdinthe ar【jcle.The珈nhDl 蛐印p1i葩 d ̄tion s13:llculre and eIli酬 】u oontrol m, iaIin—system,eelf—di , and舶I硌町PnP把 l The system may工ealj∞automation c ̄tml of nmpecfive elements缸 发田In 嘎Ⅳ.珂姗岫I l welds Greenhouse env ̄onmemt,Dim syal ̄n,|nt-II't ̄t 1 ,Fury l砌
20世纪90年代以来,我国的设施栽培技术发展很 快,据不完全统计,到目前为止,我国的棚室设施栽培面 积达3×l } 。但棚室农产品的生产管理一直存在着 水平低、方法落后的问题,其主要原因为现有棚室结构简 陋,缺乏配套设备与先进的管理技术 尤其是环境控制 能力低、自动化水平不高,管理上仍以经验为主。 为了适应目前我国农业经济的发展水平和管理人员 的素质水平,研究开发成本低,可靠性、稳定性、通用性 好,便于管理维护,能够对棚室内的温度、湿度、光照度、 c 浓度、营养液及滴灌系统进行智能化实时监控的棚室 环境自控系统,将对我省乃至我国设施栽培的发展,起到 积极的促进作用。 l研究内容 1.1研究目标 (1)实现温室环境要素温、湿、光、气、水、肥(主要指 coz及营养液酸碱度、电导率)等的自动监测与控制。 (2)采用智能化等先进的控制算法,达到经济台理的 控制效果。设计出满足国内一般条件下,集约化种植需要 的、经济方便的棚室环境自动控制系统。其系统要具有较高 的通用性,可在农、林、水等行业的类似领域中应用。 1.2自控系统的设计方案 我们在充分调研、分析、借鉴国内外有关技术与资料的 基础上,棚室环境智能控制系统的研制采用了以下方案: 棚室环境智能控制系统将以商用Pc机为上位机,以 实用、价廉的MCS一51单片机作为下位机组成集散式棚 宣控制系统。上位机主要功能是设定下位机的控制参 数,实现系统实时监测;完成数据管理、历史资料统计分 析任务。同时还可实现对数据的显示、编辑、存储、打印 凳嘉 } 苫主 攻 蔬 花卉枭 化栽培 作者衙舟:橱掘(1971一),男,安戢省蚌埠市人,工程师,主要^L事计算 收瞢日期: 篙 厦人工智能直用斫竞。 输出。下位机主要功能是实现对温室环境要素的测控。 即通过传感器采集有关环境要素数据,如疆度、湿度、coz 浓度和光照度等,并将这些数据与设定值进行比较,结合 有关控制设备的工作状态,运用专门的控制算法,给出相 应的控制信号,驱动相关设备,实现对环境要素的调控; 同时将环境数据贮存在备有后备电源的R^M中,在上位 机时将数据传输至上位机。为降低成本,系统要有较强 的扩充性。部分传感器和环境控制设备能实现自诊断; 所有传感器具有“即插即用 的功能.可以自行对传感器 的使用和失效进行判断与相应处理;系统功髓可满足现有 各类棚室使用需要,易于推广。考虑剜上位机与下位机间 的距离可能较远,两者之间需要有较高的传转速率,因此 棚室环境智能控制系统采用RS485串口实现散据通讯。 1.3棚宣环境智能控 系统硬件设计研究 系统硬件部分包括l0个组成单元,每个组成单元就 是一个线路板组件,棚室自控系统硬件结构框图见图1 所示。 如何选择适台棚室自控系统在线监漕的传感器是决 定该系统成败的关键之一。根据对棚室需用的传感器的 要求,在分析国内外有关传感器性能的基础上,确定了本 智能控制系统中传感器选用原则为:对于国内生产非常 成熟、质量可靠的温、湿度、光照度、 值、Dc值、液位传 感器以及用于棚室外环境测量的风速、风向、雨量传感 器,选用国内大、中型企业或中外台资企业生产的产品; 对于土壤水分、c 这2种国内目前在精度、准确度、稳定 性上,还尚未成熟的传感器,则分g9采用了英啻和芬兰的 产品。棚室自控系统下位机主控板是硬件秉统的核心。 根据系统的总体设计要求,主控板的设计应具备以下功 能:输入32路模拟量,16路开关量,1路散字量(八位),两 路脉冲量;输出4o路开关量。 :庄设计主控板时我们还考虑为适应糠蜜胄控系统的 要求,主控板还应具备下列能力:①为摄蠢鼍坑的宴时
- - -.. - - 总结资料 分布式温室控制系统
摘要 针对农业环境自动化控制的需要,研制了“分布式智能型温室计算机控制系统”。该系统体系结构为中心计算机和单片机智能控制仪的主从式结构,系统采用实时多任务操作系统和农业温室专家系统的人工智能技术,对温室内外环境因子进行实时监测和智能化决策调节,为农作物创造最优化的生长条件。实时多任务系统使系统的通信,环境参数采集,控制可以同时进行:由于现场情况的复杂性和多变性,依靠精确数学模型的传统控制已经无法很好地解决问题,因此,本系统采用存储大量现场经验和知识的专家系统来达到控制的目的。采用专家系统从理论上去验证和分析系统,保证了系统运行的稳定性和可扩展性,降低了开发难度。系统硬件主要由环境因子实时监测模块、智能决策模块组成。软件部分采用组态方式实现,包括数据库管理模块、人工控制模块等几部分构成,具有操作简便,可靠性高,便于升级扩充等特点,已实现产品化。本系统软件采用组态方式实现,文中介绍了如何利用来实现用于工业控制系统的组态软件。传统的面向对象的设计思想已经难以适应现在的分布式软件模型的要求,组件化的程序设计思想是为了提高软件的可重用洼,可扩展性而出现的。组态软件则是为了满足控制系统现场情况的多变性而出现的。为了提高软件的可重用性.减少控制软件设计中的重复劳动,所以控制软件设计成为组态方式成为一种趋势。利用的思想,采取模块包装的方式来实- - -.. - - 总结资料 现组态软件使得这样的软件能够直用于不同的控制系统。 关键词:温室 专家系统 人工智能 组态软件 单片机 1绪论 二十一世纪是生命科学的世纪。加强以现代农业生物技术为主体的农业高科技的研究与开发,是下个世纪我国农业领域能否掌握科技进步主动权的关键。发展农业高科技产业是促进我国农业高科技研究开发及其与经济建设紧密结合的重要途径。温室设旌的自动检测和控制技术能为作物创造良好的生长环境,同时温室内的高温、高湿作业环境,又需要作业的自动化技术。随着温室面积的扩大以及自动化装备的应用,如何进行温室的群管理,以降低运行成本、提高效率、实现环境的精确控制成为目前研究的关键问题。针对温室环境的自动控制技术、智能管理技术、温室群管理技术正在逐步得到应用,并正向无人化方向发展。.从计算机局域网到互联网,已形成了世界X围的计算机网络。由于信启.资源量大、更新传递速度快、遍及世界各地等特点,近年来它的应用取得了飞速的进展,同时在农业领域的应用也越来越广泛。近几年来,随着低价格、高性能计算机的普及应用以及计算机网络的低价格和高速度,人们在寻求将温室的计算机检测控制信息形成网络化,利用网络的优势来实现温室群的高效率栽培管理,环境控制的精确化、节能化以及设备成本的降低。本文主要介绍并分析远程分布式控制系统设计技术在温室环境控制上的应用。 国外研究现状 温室设施使用基于internet的远程控制技术可实现设施环境检测- - -.. - - 总结资料 和控制,即在远离温室现场的场所,通过网络进行温室设施的温度、湿度等设施环境的确认.也可以变更加温器等环境控制没各的设定值。在发生异常情况时.可以自动通报到牛产者的或者传呼机上,远程进行紧急处置。使用该技术主要有以下的优点:1)可以利用网络的高效率管理,实现分敞控制功能,使坏境均匀化、节能.实现精确控制。2)降低设备成本,节省人力。3)实现温室的群管理。日本的四国电力集团丌发了“OPENPLANET(简称OP)”这一适合于双方向的远程监视控制系统。陔系统主要由检测控制用LAN、信息采集单元、数据记录单元、分散控制器、OP服务器计算机等组成。由软件编程做成的模拟实物机器的“虚拟机VM”,可以在网络间任意传送。用PC机或PDA及移动可以把这个“虚拟机”呼出来进行操作。OPENPLANET技术让“无论何地,分昼夜,只要机网相联,便能遥控自如”的构想变为方便易行的现实。该系统可以实现温室的群管理。 结合人工智能及其专家系统领域的研究优势.采用中央控制计算机与单片机智能控制器的主从式体系结构,实时多任务操作系统和农业温室专家系统,研制了了这套分布式智能型温室控制系统。系统对温度,湿度.光照等环境因子实行实时控制.多任务的控制方式提高了温室系统的灵活性,高精度传感器保证了控制精度;分布式体系结构使得控制部分与温室部分可以分离丌宋,两者通过一根总线进行多讥通信,降低了通信成本,使得系统能够很方便的实现远程自动控制或昔手动控制。 1.系统软件采用组态化设计。 - - -.. - - 总结资料 由于控制方式的多样性以及温室数目,温室设备种类的变化,对温室控制软件有着更好的要求,即要求它能根据不同的场合进行软P旧l态。组件化程序设计方法强调真正的软件重用和高度的互操作性.它侧重于组件的产生和装配,这样使得系统能够满足不同的现场状况,可以根据不同的项目束预制软件,大大提高了软件开发的重用性。 2.温室控制系统的特点及结构 2.1智能温室控制系统的特点智能温室控制主要是根据外界环境的温度、湿度、光照以及胍速、风向、雨量等气候因子,基于温室专家系统和用户参数设定,通过一些控制措施米调节温室内的温度、湿度、通风、光照等环境因子,创造出适合作物生长的合适温室生态环境(该环境是按不同作物生长的要求进行统筹优化后制定的),即根据作物不同生长阶段的需求制定出检测标准,通过对温室环境的实时检测,将测得参数进行比较后自动调整温室各个控制设各状态,以使各项环境因子符合既定要求。目前对温室环境控制主要采用两种方式:单因子控制和多因子综合控制。(1)单因子控制是相对简单的控制技术,在控制过程中只对某一要素进行控制,不考虑其它要素的影响和变化(2)多因子综合控制也称复合控制,可不同程度弥补单因子控制的缺陷。该种控制方法根据作物对备种环境要素的配合关系,当某一种要素发生变化刑,其它要素自动做出相应改变和调整,能更好地优化环境组合条件.是温室控制技术的主要发展方向。由于控制方式的多样性以及温室数目,温室设备种类的变化.对温室控制软件有着更好- - -.. - - 总结资料 的要求,即要求它能根据不同的场合进行软件组态。能够把大部分的开发工作集中在用户提出项目需求之前进行,这样可以保证用户提出需求或者调整需求后迅速生成或者改动系统。通过组态系统的实现.可以降低项目承接后的软件开发工作量,可以利用更多的时间对系统的稳定性进行测试以及软件的易用性进行改进。 2.2温室控制系统的总体架构及各部分功能按照系统要达到的控制目的,温室控制系统是由四个部分组成:1)信号采集输入部分:包括温度、湿度、光照、风速、风向、雨量等环境因子的捡测:2)信号转换与处理部分:将采集的信号转换为计算机和操作人员可识别的量,并由汁算机进行相关处理;3)输出及控制部分:控截风机湿帘、遮阳网、窗的丌关等系统。4)灌溉控制:包括定时灌溉,时间由控制室调整制定.并可根据实际情况. 在温室内进行手动控制灌溉系统的各个部分功能和关系如下: 1)计算机为管理机,完成参数设置、数据存储、处理及管理功能。2)每个温室具有灌溉控制和气侯控制2个从机。3)从机为控制机,采用单片机系统,直接实现各个模块的控制功能,并能在主机关机的条件下实现所有的控制功能。4)串行通信采用RS一485接口实现一对多通信,主要是主机向从机发送控制参数,从机将现场采集数据传给主机。5)数据采集实现对传感器及运行设备的检测。6)控制器及其设备根据系统输出的信号对现场设备进行控制。输入输出部分包括输入模块和输出模块,输入模块将采集的信号转换后输入到从机.输出模块将系统的控制信号输出到控制器及其设备部分。 - - -.. - - 总结资料 系统组成及硬件实现过去温室计算机控制系统基本上采用了主机一终端模式(Host—TerminalMode),该模式通过一个主机作为控制中心,负责对其它各子系统进行控制管理,该种模式不灵活,且投入较大。我们的温室控制系统由中心计算机和单片机控制仪组成,一台计算机与多台单片机进行实时通汛,用户通过上位机对温室进行监控以及控制。计算机与控制仪之间采用RS485总线连接方式,这种连接方式使得数据传输准确,快速。目前分布式系统是计算机控制系统的主要发展方向,该控制系统采用了所i胃服务器一客户模式。所谓分布式系统是指在整个系统中不存在一个所谓的中心处理系统,而是由许多分布在各温室中的可编程控制器组成,每一个控制器连接到中心监控计算机上。由每个子处理器处理所采集的资料并进行实时控制,而由主处理器存储和显示子处理器传送来的资料,主处理器可以向每个子处理器发送控制设定值和其它控制参数。 本系统采用了分布式的体系结构,采用一台计算机控制多台控制仪,系统之间通过串口总线进行通信。计算机通过与控制仪通信获取温室环境数据,通过计算机软件里面预制的专家系统对温室进行实时多任务控制。专家系统包含了温室模糊控制算法,PID调节算法,经验系数等数据。每一个控制仪控制一个温室,控制仪主要负责数据采集和现场调节等功能。控制仪包含了采集,控制等电路,采用微控制器实现,而且外扩的键盘和LCD使得可以在现场直接观测系统运行状况,并且做出适当的调节。控制仪外扩存储器,可以储存运行参- - -.. - - 总结资料 数及保存历史数据,使得控制仪可以独立于计算机工作以及针对历史数据进’亍相应的系统调整,数据查错等处理。 总结 本文采用了实时多任务操作系统和温室专家系统人工智能技术。实时多任务操作系统使得系统的多个决策可以并行的运行,提高了系统的运行效率和反应速度;存储大量现场经验和知识的温室专家系统的采用保证了系统运行的实用性,可靠性;软件组态的方式可以让软件适用于各种不同的温室系统中,减少了重复编码工作,提高了软件开发的效率。温室控制系统使用了一台微机作监控服务器,多台由单片机为核心的温室智能控制器分别控制多个温室。使用语言开发了控制器C5I软件和通信程序,监控服务器监控软件是在Windowsxp环境下、VisualC.+6.0平台上开发的,通信程序使用Mscomm控件编写,最终灵活地实现了周期性数据采集和非周期性人工干预两种通信方式的完美结合,通信效果相当理想,整个控制系统的控制效果也达到了预期效果。 建议 1)分布式系统是一个开放式的系统,必须随着技术的发展不断前进,即系统模型需要演进; 2)智能传感器的改进:目前系统使用的传感器已经能够满足设计温室控制的需要,为了能够对温室进行更加精确的控制,进一步提高传感器的精度和稳定性是很有必要的了; 3)丰富上位机的管理功能:由于实际应用的要求,目前的管理软件