基于空间解析几何的双横臂独立悬架运动学分析
- 格式:pdf
- 大小:263.91 KB
- 文档页数:4
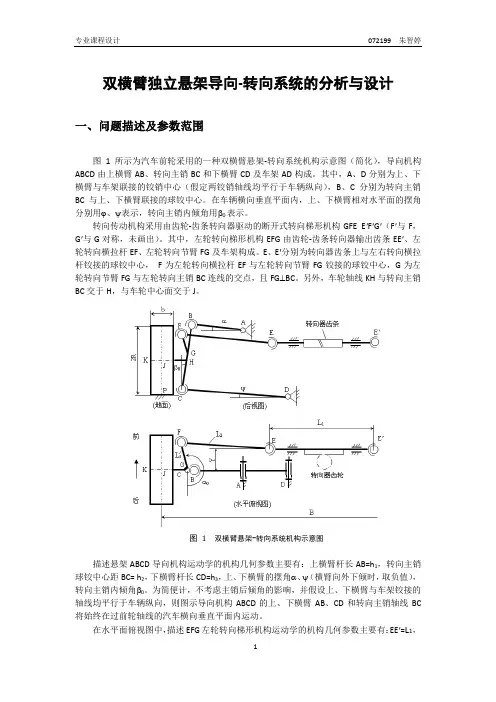
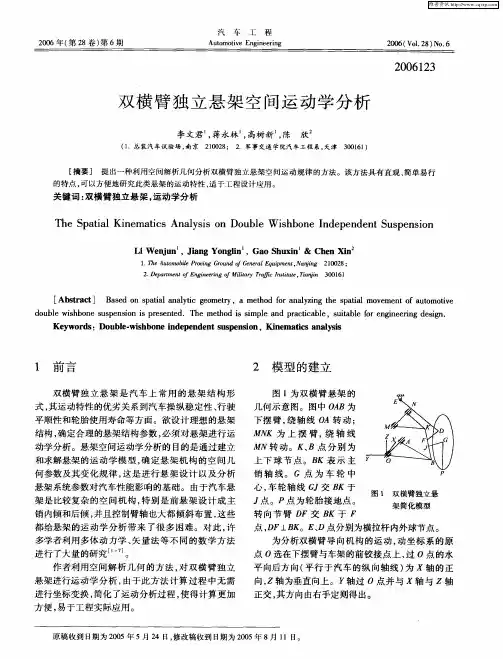
双横臂独立悬架导向-转向系统的分析与设计一、问题描述及参数范围图1所示为汽车前轮采用的一种双横臂悬架-转向系统机构示意图(简化),导向机构ABCD由上横臂AB、转向主销BC和下横臂CD及车架AD构成。
其中,A、D分别为上、下横臂与车架联接的铰销中心(假定两铰销轴线均平行于车辆纵向),B、C分别为转向主销BC与上、下横臂联接的球铰中心。
在车辆横向垂直平面内,上、下横臂相对水平面的摆角分别用ϕ、ψ表示,转向主销内倾角用β0表示。
转向传动机构采用由齿轮-齿条转向器驱动的断开式转向梯形机构GFE E'F'G'(F'与F,G'与G对称,未画出)。
其中,左轮转向梯形机构EFG由齿轮-齿条转向器输出齿条EE'、左轮转向横拉杆EF、左轮转向节臂FG及车架构成。
E、E'分别为转向器齿条上与左右转向横拉杆铰接的球铰中心,F为左轮转向横拉杆EF与左轮转向节臂FG铰接的球铰中心,G为左轮转向节臂FG与左轮转向主销BC连线的交点,且FG⊥BC。
另外,车轮轴线KH与转向主销BC交于H,与车轮中心面交于J。
图 1 双横臂悬架-转向系统机构示意图描述悬架ABCD导向机构运动学的机构几何参数主要有:上横臂杆长AB=h1,转向主销球铰中心距BC= h2,下横臂杆长CD=h3,上、下横臂的摆角α、ψ(横臂向外下倾时,取负值),转向主销内倾角β0。
为简便计,不考虑主销后倾角的影响,并假设上、下横臂与车架铰接的轴线均平行于车辆纵向,则图示导向机构ABCD的上、下横臂AB、CD和转向主销轴线BC 将始终在过前轮轴线的汽车横向垂直平面内运动。
在水平面俯视图中,描述EFG左轮转向梯形机构运动学的机构几何参数主要有:EE'=L1,EF= L2,FG= L3,车架上齿条移动方向线EE'与前轮轴线的偏移距Y(前轮轴线在前方时,取正值),转向节臂FG相对于汽车纵向的安装角α0。
另外,左右车轮的转向角分别用α、β表示。
1前言与双横臂悬架相比,在对悬架进行车轮跳动和加载外力的分析中,多连杆悬架表现出较好的运动学和弹性运动学特性,使其更有利于提高汽车多方面的性能,尤其是提高操纵稳定性。
因此近几年来,多连杆悬架开始得到人们较多的关注,在性能要求ineDivision,2005:337~341.4LucasGG,RichardsWL.TheHydrogen/PetrolEngine-TheMeanstoGiveGoodPart-LoadThermalEfficiencySAEPa-per820315.5AndreaTD,HenshawPF.InvestigatingCombustionEnhan-cementandEmissionsReductionwiththeAdditionof2H2+O2toaSIEngine.SAETechnicalPaper,2003-32-0011.6MathurHB,DasLM.PerformanceCharacteristicsofaHydro-genFuelledS.I.EngineUsingTimedManifoldInjection.Int.JournalofHydrogenEnergy,1991,16(2):115~127.7LeeSJ,YiHS,KimES.CombustionCharacteristicsofInta-kePortInjectionTypeHydrogenFueledEngine.Int.JournalofHydrogenEnergy,1995,20(4):317~322.8RottengruberHM,etal.Direct-InjectionHydrogenSI-Engine-OperationStrategyandPowerDensityPotentials.SAEPaper,2004-01-2927.9KimYY,LeeJT,ChoiGH.AnInvestigationontheCausesofCycleVariationinDirectiInjectionHydrogenFueledEngines.Int.JournalofHydrogenEnergy,2005,30(1):69~76.10TakashiK,etal.AStudyontheMechanismofBackfireinEx-ternalMixtureFormationHydrogenEngines.SAETechnicalPaper,971704.11BerckmüllerM,etal.PotentialsofaChargedSI-HydrogenEngine.SAEPaper,2003-01-3210.(责任编辑文楫)修改稿收到日期为2006年11月22日。
双横臂独立悬架的仿真与优化研究
杨红强;翁建生
【期刊名称】《机械科学与技术》
【年(卷),期】2011(030)010
【摘要】针对某款车双横臂独立悬架RSSR机构,采用了空间解析几何方法,推导了该悬架运动规律,通过Matlab数值建模仿真与ADAMS多体运动学仿真进行悬架运动学分析对照,验证了所建ADAMS多体运动学分析模型的正确性。
然后首次提出使用iSIGHT软件集成ADAMS进行了悬架硬点灵敏度分析,并在此基础上进行了悬架性能优化。
结果表明,使用iSIGHT优化悬架性能算法多样灵活,达到了提高操纵稳定性和降低轮胎磨损的目标。
【总页数】5页(P1683-1687)
【作者】杨红强;翁建生
【作者单位】南京航空航天大学能源与动力学院,南京210016;南京航空航天大学能源与动力学院,南京210016
【正文语种】中文
【中图分类】U461.1
【相关文献】
1.FSAE赛车两种不等长双横臂独立悬架的运动位移比例仿真与对比 [J], 刘泽;张新
2.双横臂独立悬架导向机构优化仿真及参数化台架实验验证 [J], 何磊;陈辛波;黄露;
王磊
3.基于ADAMS的双横臂独立悬架仿真分析及优化设计 [J], 詹隽青;赵子涵;孟祥德;王雷
4.装有互联双横臂独立悬架的方程式赛车仿真分析 [J], 刘凯华;王庆;李强
5.某全地形车双横臂独立悬架转向梯形\r断开点优化研究 [J], 赵萍;姜永晴;肖冰因版权原因,仅展示原文概要,查看原文内容请购买。
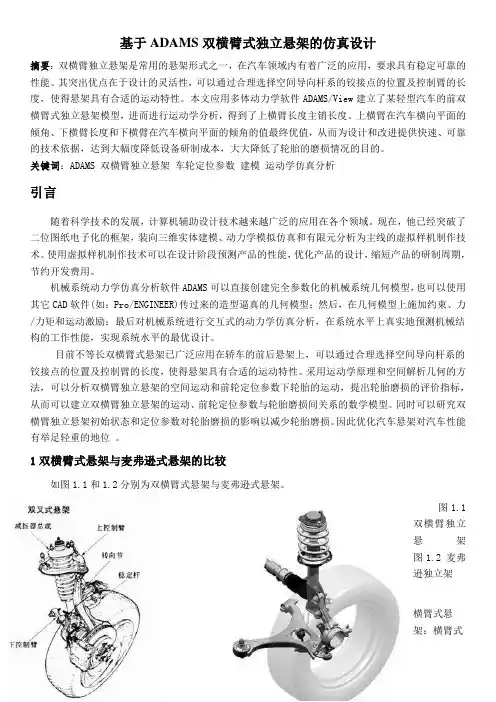
基于ADAMS双横臂式独立悬架的仿真设计摘要:双横臂独立悬架是常用的悬架形式之一,在汽车领域内有着广泛的应用,要求具有稳定可靠的性能。
其突出优点在于设计的灵活性,可以通过合理选择空间导向杆系的铰接点的位置及控制臂的长度,使得悬架具有合适的运动特性。
本文应用多体动力学软件ADAMS/View建立了某轻型汽车的前双横臂式独立悬架模型,进而进行运动学分析,得到了上横臂长度主销长度、上横臂在汽车横向平面的倾角、下横臂长度和下横臂在汽车横向平面的倾角的值最终优值,从而为设计和改进提供快速、可靠的技术依据,达到大幅度降低设备研制成本,大大降低了轮胎的磨损情况的目的。
关键词:ADAMS 双横臂独立悬架车轮定位参数建模运动学仿真分析引言随着科学技术的发展,计算机辅助设计技术越来越广泛的应用在各个领域。
现在,他已经突破了二位图纸电子化的框架,装向三维实体建模、动力学模拟仿真和有限元分析为主线的虚拟样机制作技术。
使用虚拟样机制作技术可以在设计阶段预测产品的性能,优化产品的设计,缩短产品的研制周期,节约开发费用。
机械系统动力学仿真分析软件ADAMS可以直接创建完全参数化的机械系统几何模型,也可以使用其它CAD软件(如:Pro/ENGINEER)传过来的造型逼真的几何模型;然后,在几何模型上施加约束、力/力矩和运动激励;最后对机械系统进行交互式的动力学仿真分析,在系统水平上真实地预测机械结构的工作性能,实现系统水平的最优设计。
目前不等长双横臂式悬架已广泛应用在轿车的前后悬架上,可以通过合理选择空间导向杆系的铰接点的位置及控制臂的长度,使得悬架具有合适的运动特性。
采用运动学原理和空间解析几何的方法,可以分析双横臂独立悬架的空间运动和前轮定位参数下轮胎的运动,提出轮胎磨损的评价指标,从而可以建立双横臂独立悬架的运动、前轮定位参数与轮胎磨损间关系的数学模型。
同时可以研究双横臂独立悬架初始状态和定位参数对轮胎磨损的影响以减少轮胎磨损。

基于空间解析几何的双横臂独立悬架运动学分析
田中辉;李玉光;王淑芬;穆晓凯
【期刊名称】《机电工程》
【年(卷),期】2012(029)008
【摘要】针对汽车悬架运动学分析方法中存在计算过程复杂、不易编程计算的问题,给出了一种应用空间解析几何理论建立双横臂独立悬架运动学性能参数的数学模型的方法.首先在ADAMS软件中建立了双横臂独立悬架的实体仿真模型,仿真结果表明所建数学模型正确、可靠;然后为便于工程实际应用,以Matlab为设计平台,开发了可视化的双横臂独立悬架运动学分析界面GUI,该界面友好、易于设计人员操作;最后利用该界面输出的曲线评价了双横臂独立悬架的运动学性能.研究结果表明,该方法简便直观、易于实现计算机编程,在一定程度上提升了悬架运动学分析及改进设计的效率.
【总页数】4页(P894-897)
【作者】田中辉;李玉光;王淑芬;穆晓凯
【作者单位】大连大学机械工程学院,辽宁大连116622;大连大学机械工程学院,辽宁大连116622;大连大学机械工程学院,辽宁大连116622;大连大学机械工程学院,辽宁大连116622
【正文语种】中文
【中图分类】U463;TH113.2+2
【相关文献】
1.基于空间解析几何的汽车麦式悬架运动学分析 [J], 高立新;周慧会;胡延平
2.双横臂独立悬架运动学分析与优化设计 [J], 施睿;赵春霞
3.轮式车辆双横臂独立悬架运动学分析 [J], 党潇正;张建华;卫晓军;谢鑫鹏
4.基于UG的双横臂独立悬架运动学分析系统 [J], 侯永涛;陆建辉;周孔亢;汪若尘
5.双横臂独立悬架导向机构运动学分析及优化 [J], 高翔;李江;程建平
因版权原因,仅展示原文概要,查看原文内容请购买。
收稿日期:20010711作者简介:戴旭文(1969-),男,吉林市人,硕士研究生,研究方向为汽车车身设计.文章编号:10094687(2002)02002905汽车双横臂独立悬架的运动学分析和计算戴旭文, 谷中丽, 刘 剑(北京理工大学车辆与交通工程学院,北京 100081)摘 要:利用机构运动学中的坐标变换以及数值计算的方法对汽车双横臂独立悬架系统进行运动学分析,从而建立悬架系统结构的运动模型.实例的优化结果表明,将传统机构学方法与现代数值计算方法相结合,使悬架设计的更为精确和清晰,提高了工作效率.关键词:双横臂独立悬架;导向机构;运动学分析中图分类号:U 463 33+1 文献标识码:A1 引 言采用双横臂独立悬架的车辆具有良好的行驶平顺性和操纵稳定性,所以在现代汽车上得到广泛应用.通常情况下,在汽车设计过程中对前轮独立悬架导向机构的设计要求如下[1]: 当车轮与车身产生相对运动时,保证轮距变化在一定的范围之内( 4 0m m),以免轮胎过早磨损; 当车轮上下跳动时,前轮定位参数要有合理的变化特性,不应产生纵向加速度. 转弯时,应使车轮与车身倾斜方向相同,增加汽车的不足转向效应.双横臂独立悬架的布置是空间的,机构的空间运动分析过程比较复杂,计算量很大.传统设计一般采用经验设计、查表法以及作图等方法,设计虽然可以基本满足要求,但精度和效率不高.作者建立了悬架机构的运动模型,简化了运动分析过程;数值计算模型的建立和计算机的使用,减轻了手工计算量,提高工作效率.2 双横臂独立悬架的导向机构运动学分析典型的双横臂独立悬架导向机构如图1所示.为了简化分析,图中略去了转向节臂.A ,D 分别为上、下横臂的回转中心点,主轴销通过B ,C 两个球面副与上下横臂相连接.1、2、3、4杆组成的空间机构,是由A ,D 两个转动副与车身相连组成的一个典型RSSR 闭环空间机构.2 1 系统的上横臂输入 2与下横臂输出 1按照Denavit Hartenberg 坐标系的规定[2],取坐标系如图1.k 1,k 4轴分别与转动副的轴线重合,k 2与k 1平行( 2=0)且通过球面副B 的中心,k 3轴通过主销球头的中心.另外取两个回转轴的公垂线为i 1,通过球心B 垂直于k 1与直线i 2.2002年第2期车 辆 与 动 力 技 术V ehicle &Pow er T echnolog y 总第86期图1 双横臂独立悬架导向机构简图DC 下横臂;BC 主轴销;A B 上横臂;JQ 车轮轴;A ,D 转动副;B ,C 球副;Q 车轮中心;G 接地点机构的位姿方程:E k 2E i 2E 23E 34E k 1E i 1=I,(1)其中 E 12,E 23,E 34,E 41为欧拉变换,分别为 1, 2, 1, 2的函数;I 为单位阵.由于 2=0,从而E i 2=I ,式(1)简化为:E k 2E 23E 34E k 1E i 1=I ,(2)根据机构运动学[2]可知:P = m j=1(h j i j +s j k j )=h 1i 1+s 1k 1+h 2i 2+l k 3+h 4i 4-s 4k 4=0,(3)参数代入、化简可得:A 1sin 1+A 2cos 1+A 3=0,(4)其中 A 1=s 1h 4sin 1-h 2h 4sin 2cos 1, A 2=h 1h 4+h 2h 4cos 2,A 3=12(s 24+h 21+s 21+h 22+h 24-l 2)-s 4s 1cos 1+h 1h 2cos 2-s 4h 2sin 1sin 2.进一步求解得到:1=2arctan A 1 A 21+A 22-A 23A 2-A 3.(5)式(5)描述了上横臂的角输入 2与相应的下横臂的角输出 1之间存在的确定的函数关系,通过式(5)可以对整个导向机构进行运动学分析、计算.2 2 主销两球头坐标的求解由机构运动学原理可知,设有某一任意轴 方向向量为: =( 1, 2, 3),那么绕 回转的变换矩阵为E ,则主销两端B ,C 两点的坐标为:B =E ( 1-C =E ( 2-(6)30 车辆与动力技术 2002年其中 01, 02,B 0,C 0是初始值.B ,C 的坐标求出后,设 =|BJ |/|BC |,车轮回转中心点J 的坐标J =(1- )B + C.J 点是悬架导向机构和车轮的理论连接点,它的确定是进一步分析车轮运动的基础.3 汽车车轮部分的运动分析3 1 车轮中心点Q 的坐标求解第一步先求解出转向节臂的回转中心H 点的坐标.将B -C -J -Q -G 从图1中分离出来,见图2.H 点的运动具有以下的约束条件:图2 车轮及转向节IH 转向拉杆;JH 转向节臂;H ,I 球副|HJ |=con st 1|HB |=con st 2|HI |=con st 3,(7)其中 con st 1,con st 2,con st 3可以根据系统的初始条件获得.B ,I ,J 点的坐标均已在上面求出,所以式(7)是三元二次方程组.利用数值解法[3]解得H 点的坐标:(H X ,H Y ,H Z ).同理,由于Q 点到B ,C,H 的距离不变,所以存在下列方程组:|QH |=con st 4|QB |=con st 5|QC |=con st 6,(8)其中 con st 4,con st 5,con st 6可以根据系统的初始条件获得.解之得Q 点的坐标:(Q X ,Q Y ,Q Z ).3 2 车轮接地点G 的坐标求解设车轮平面的方向向量n =(a ,b,c)T ,根据汽车结构的特点,车轮平面的法线方向向量与QJ 轴的方向向量相同,且Q 点位于车轮平面内,由此可以设车轮平面的方程为:aX +b Y +cZ +d =0;另外G 点位于车轮的圆周上,车轮圆周的方程为:aX +bY +cZ +d =0(X -Q X )2+(Y -Q Y )2+(Z -Q Z )2=R 20,(9)其中 R 0为车轮半径.G 点是这个圆周上Z 坐标值最小的一点,可以利用计算机采用优化解法求得G 点的坐标.4 车轮定位参数的确定[4]31 第2期 戴旭文等:汽车双横臂独立悬架的运动学分析和计算车轮的外倾角 L Y =arctanQ Y -G Y Q Z -G Z ; 车轮的前束角 QS =arctan Q X -J X Q Y -J Y ; 轮距的变化量 =2(G X -G X 0)2+(G Y -G Y 0)2+(G Z -G Z 0)2; 车轮的纵向加速度a =G X -G X 0G Z -G Z 0a Z.汽车转向行驶时外侧车轮处于压缩行程,前束角减小;内侧车轮处于复原行程,前束角增大;车轮向汽车纵向中心转动,增加了不足转向量.从车轮的纵向位移变化幅度可以计算出车轮在跳动时的附加纵向加速度.汽车行驶过程中,车轮上下跳运时,只有主销及车轮的定位参数变化在所要求的范围内,且车轮运动与导向机构的运动彼此协调,才能保证汽车行驶过程中具有良好的操纵稳定性和平顺性.5 计算实例如图1所示的双横臂系统,建立固定在汽车车身上的直角坐标系,原点位于A 点.k 1和k 2轴在X OZ 平面中与X 轴的夹角分别为-1 5~1 5 ,6 .初始时刻A ,B ,C,D,J ,Q,H ,I 点的坐标(mm )为:A (0,0,0),B (3,281,-21 44),C (7,317,-295),D (10,-121,-238),H (154,256,-327),I (74,-151,-264),Q (8 5,419,-241),J (5 8,306,315 5).将上述坐标转化为Denav it-Hartenberg 坐标,计算车轮的定位参数.当车轮上下跳动的范围为 50mm 时:前轮外倾角的变化范围:-0 4~2 7 ;车轮前束角的变化范围:1~1 57 ;车轮横向滑移变化范围:-7 4~6 2mm ;主销内倾角的变化范围:7 5~9 ;主销后倾角的变化范围:0 65~1 ;车轮的纵向加速度为:0 076a Z .从上面的数据来看,此设计的指标不高,尤其是车轮的滑移特性很差.另外,车轮前束角和主销后倾角的变化范围有些大,总之这个设计方案不十分理想.利用上述所建的模型对所选坐标(mm)进行优化,得到:A (0,0,0),B (5 6,266,-74),C (12 7,301 8,-345),D (59,-159,-286),H (201,212,-277),I (113 3,-199,-214),Q (13 8,469,-271),J (43,291,298).优化后的设计方案(车轮上下跳动 50m m )车轮定位参数如下:前轮外倾角的变化范围:0 34~1 73 ;车轮前束角的变化范围:1 03~1 10 ;车轮横向滑移变化范围:-2 96~2 02mm ;32 车辆与动力技术 2002年主销内倾角的变化范围:6 3~9 42 ;主销后倾角的变化范围:1 34~1 84 ;车轮的纵向加速度为:0 045a Z .从所得的数据来看,虽然主销内倾角的变化范围有所增加,但是其他指标都有了一定的改善,尤其是车轮滑移特性得到了明显的提高.综合比较,第二个方案比较理想.6 结 论本文所建立的运动模型适合于RSSR 结构的各种车型双横臂独立悬架的结构参数设计,具有较高的设计精度,同时可以对各个参数进行定量及定性的分析,使设计者能够清楚地了解悬架的各种运动特性.在具体的实用软件的使用中,只需设计输入约束条件即可对机构进行运动分析和优化设计.设计者只需要了解参数的实际含义,正确确定各个约束条件即可.由于计算机的使用,可以摆脱依靠试验和查表以及经验的设计方式,不但可以提高设计效率,同时还可以提高设计的准确性.参考文献:[1] 张洪欣.汽车设计[M ].北京:机械工业出版社,1989.[2] 谢存禧,郑时雄,林怡青.空间机构设计[M].上海:上海科学技术出版社,1996.[3] 丁丽娟.数值计算方法[M].北京:北京理工大学出版社,1997.[4] 毛 明,张相麟.轮式车辆双横臂独立悬架的运动优化设计.汽车工程[J].1997(3):38-45.Kinematics Analysis and Calculation of the Double -WishboneIndependent Suspension of Wheeled -VehicleDAI Xu -w en, GU Zhong -li, LIU Jian(School of Vehicle and T r anspor tat ion Eng ineering,Beijing Institute of T echnology,Beijing 100081,China)Abstract:The article adopts the methods of coordinate conversion and numerical calculation for the kinematics analysis and calculation and then creates a model for the optionization of a double-w ishbone suspension system of w heeled-vehicle.The result of the example indicates that the combination of traditional mechanism kinematics w ith modern numerical calculation can sim plify the calculations during design,and meanw hile make the process of design more concisely and clearly.Key words:double-w ishbone suspension;guide mechanism;kinematics analysis 33 第2期 戴旭文等:汽车双横臂独立悬架的运动学分析和计算。
双横臂螺旋弹簧独立悬架的分析与计算摘要:本文针对双横臂螺旋弹簧独立悬架进行分析与计算。
首先,介绍了该悬架的结构特点,然后,建立了悬架的运动学和动力学模型,通过对模型的分析,对悬架的行驶性能进行了分析和计算。
最后,通过对计算结果的分析,得出了适用于该悬架的优化参数,从而提高了悬架的性能。
关键词:双横臂螺旋弹簧独立悬架,运动学模型,动力学模型,行驶性能,优化参数正文:1. 引言汽车悬架系统是汽车重要的组成部分之一,负责支撑汽车重量和吸收路面的震动,保证汽车平稳运行。
随着汽车发展的进步,悬架系统的要求越来越高。
本文研究的双横臂螺旋弹簧独立悬架是一种新型的悬架,具有结构简单、重量轻、耐久性好等特点。
该悬架系统将横向悬挂支架和纵向悬挂支架相结合,同时采用螺旋弹簧作为弹簧元件,能够大大提高汽车的行驶性能。
2. 悬架结构分析双横臂螺旋弹簧独立悬架是由两个横向悬挂支架和两个纵向悬挂支架构成的。
其中,横向支架与车身垂直,呈梯形分布,上端与车身固定,下端有球头连接轮毂。
纵向支架与车身平行,通过凸轮控制台架固定在轮轴上。
纵向支架的下端也有球头连接轮毂。
螺旋弹簧作为弹簧元件,负责支撑车身重量,并吸收路面的震动。
3. 模型建立针对双横臂螺旋弹簧独立悬架,建立了运动学和动力学模型,以求出悬架的运动和力学特性。
(1) 运动学模型双横臂螺旋弹簧独立悬架的运动学模型采用四杆机构模型,以提高模型的准确性。
运动学模型主要由下列方程组成:$ x_0 = x_1 + l_1 \ cos\theta_1 + l_2 \ cos\theta_2 $$ y_0 = y_1 + l_1 \ sin\theta_1 + l_2 \ sin\theta_2 $$ \theta_2 = \theta_3 - \theta_1 $$ \theta_2 = \arcsin\frac{y_0-y_1-l_1 \ sin\theta_1}{l_2} $$ \theta_1 = \arctan\frac{x_0-x_1-l_1 \ cos\theta_1}{l_2 \cos\theta_2} $$ \theta_3 = \arctan\frac{y_3-y_2}{x_3-x_2} $其中,$x_0$、$y_0$为车身中心点坐标,$x_1$、$y_1$为悬架上端点坐标,$x_3$、$y_3$为悬架下端点坐标,$\theta_1$、$\theta_2$、$\theta_3$为转角,$l_1$、$l_2$为悬架的长度。
扭杆式双横臂独立悬架改型设计与运动特性分析扭杆式双横臂独立悬架是现代汽车中较为常见的独立悬架类型之一。
在车身结构紧凑、悬架要求低重心、低重量的轿车和跑车上使用较多。
本篇文章将介绍该悬架的设计改型和运动特性分析。
设计改型扭杆式双横臂独立悬架由两个横向安装的悬架臂和一根垂直安装的扭杆构成。
设计改型主要针对悬挂结构材料的改进、减轻重量、提高刚度等方面。
首先,通过对扭杆进行轻量化设计,使用高强度材料,如碳纤维增强复合材料等使其强度更高、重量更轻。
同时,考虑到悬挂部件经常受到冲击和振动,应采用抗疲劳材料,提高悬挂寿命。
其次,改进悬架臂的结构设计,采用多孔形式增加刚度,减少重量。
新型结构的悬架臂可以通过调整截面形状和孔洞位置,获得足够的强度和刚度,并可大幅降低重量。
同时,为提高抗扭强度,悬架臂的中空截面会尽量保持圆形或类圆形。
最后,改进悬架连接它件的设计,采用高强度合金连接头,在确保连接稳固的同时,尽可能缩小其尺寸。
在相同强度的情况下,新型连接头的尺寸相对更小,在重量和占用空间两个方面得到了优化。
运动特性分析扭杆式双横臂独立悬架的运动特性受到悬挂构造、悬挂几何学和悬挂参数等多种因素的影响。
以下是该悬架的运动特性分析:1. 压缩表现当车辆转向、行驶在崎岖路面上或路面高度变化较大时,车轮可能会不断向上压缩,导致悬挂处发生较大的位移。
这时,扭杆发挥了扭转作用,对弯曲作用产生了补偿,保证车身的稳定性。
2. 控制换向悬架的换向性能主要由车轮对车身的横向力传输效率、扭杆和横向连接件的弯曲刚度等因素共同决定。
较高的刚度可以减少转弯时的侧倾,使车辆行驶更加平稳。
3. 提高悬挂舒适度扭杆式双横臂独立悬架中的横臂和扭杆是负责吸收震动的主要构件,在处理小幅路面起伏时非常有效。
此外,悬架臂长度的设计也对舒适性有直接影响。
较长的臂可以减少车身对细微路面不平度的反应,提高乘坐舒适度。
总之,扭杆式双横臂独立悬架适用于运动型车辆的悬挂系统。
双横臂悬架导向机构几何配置对车轮定位参数的影响重庆大学硕士学位论文(学术学位)学生姓名:徐*导师姓名:秦伟教授专业:机械设计及理论学科门类:工学重庆大学机械工程学院二O一三年五月The Effect of Double Wishbone Suspension Guide Body Geometric Configuration on Wheel Alignment ParametersA Thesis Submitted to Chongqing Universityin Fulfillment of the Requirement for theMaster’s Degree of EngineeringByXu BoSupervised by Prof. Qin WeiSpecialty: Mechanical Design and TheoryCollege of Mechanical Engineering of ChongqingUniversity, Chongqing, ChinaMay 2013摘要本文在综合分析国内外悬架系统导向机构的研究现状基础上,根据轿车悬架上的应用特点和车轮定位参数要求,重点研究双横臂悬架性能在导向机构几何尺寸参数变化时所受到的影响,对车轮跳动过程中主要定位参数的变化趋势和变化率进行分析,为结构的K&C分析、性能仿真和工程应用化奠定良好的基础。
本文的主要研究内容如下:①介绍悬架的概念、组成以及评价悬架运动学所采用的一些悬架的基本定位参数,其中包括了车轮外倾角、车轮前束角、主销后倾角、主销内倾角以及轮距变化、侧倾中心等。
详细分析双横臂悬架的运动形态以及悬架系统定位参数对整车性能的影响及其合理的变化趋势,同时分析各定位参数之间的联系。
②从双横臂独立悬架机构几何特性出发,推导出车轮外倾角与车轮跳动量和导向机构杆长尺寸的计算公式,利用MATLAB软件对比分析悬架不同杆长配置时车轮外倾角随车轮跳动的变化规律,得到较为理想的双横臂悬架布置方案。
双横臂独立悬架动态侧倾中心的研究0 引言车辆在行驶的过程中,由于路况较为复杂,当车辆路过崎岖路面或进行转向时,车轮与路面间的相对位置关系发生改变,进而将会导致车辆侧倾中心位置的变化。
在悬架运动过程中,侧倾中心的位置是瞬时变动的。
悬架的侧倾中心高度决定了整车侧倾轴线的位置。
侧倾中心位置高,它到簧载质量质心的距离就会相应缩短,在相同的侧向力作用下,则侧倾力臂与侧倾力矩均会较小,有利于车辆的稳定性。
然而,侧倾中心也不能过高,否则会使得车身侧倾时轮距变化过大,进而加剧轮胎的磨损[1]。
在确定侧倾中心的高度时,应该综合考虑各类因素的影响。
常用的轿车前独立悬架侧倾中心高度为0~120 mm,后独立悬架(不包括纵臂式)侧倾中心高度为80~150 mm[2]。
上、下横臂轴轴线皆与车辆纵向轴线平行的双横臂独立悬架是此类悬架中结构最简单的一种[3]。
1 车辆动态侧倾中心的坐标表示1.1 车身坐标系的建立建立一固连在车身上的坐标系,如图错误!未找到引用源。
所示。
此车身坐标系建立原则如下:以车辆静止停靠在水平路面上时的轮胎接地点G1、G2点所在直线与车辆左右中心轴线的交点为坐标系原点O;y轴沿车辆左右中心轴线,由O点指向车厢顶部方向为y轴正方向;x轴垂直于y轴,并定义由O点指向车辆右侧方向为x轴正方向。
汽车车身相对于车身坐标系静止。
图错误!未找到引用源。
双横臂独立悬架车辆示意图我们作出如下假设:(1)车辆左、右侧悬架以及车辆结构、形式相同,簧载质量质心位于车辆左右中心轴线、即y轴上;(2)将双横臂悬架的横臂以及转向节、车身等均视为刚体,忽略一切弹性变形效应;(3)将轮胎简化成一条直线,不考虑其断面宽度,并认为在与地面接触过程中,车轮不发生变形以及相对滑动。
1.2 内转向定点A 1、A 2、D 1、D 2在坐标系中的位置双横臂悬架内转向点A 1、A 2、D 1、D 2在车身坐标系xoy 中为4个定点,即它们在车身坐标系中的坐标表示不会随车轮的跳动而发生变化。