拓扑控制
- 格式:doc
- 大小:95.50 KB
- 文档页数:3
特种通信网的三维拓扑控制初探■ 何如龙(海军工程大学 湖北 武汉 430033)特种移动通信网与公用蜂窝移动通信网的重要差别在于:通信模式主要是采用非蜂窝的无线Ad Hoc;通信对象主要是物与物之间的通信(即传感器通信);通信拓扑主要是三维(3D)的立体拓扑,而不是传统的二维(2D)平面拓扑。
拓扑控制(TC)是节能的无线Ad Hoc和无线传感器联网的关键技术之一。
无线网络拓扑控制技术已进行了大量的研究,但是,大多数研究都是假设无线节点分布在一个二维平面(2D),如公用通信网。
然而,实际上,特种通信网的无线节点通常部署在一个三维空间(3D),如多层建筑、空中、水下或地下。
许多研究表明:当前的2D的拓扑控制算法不能直接用于3D网络,或者需要更复杂的计算才能用于3D网络。
本文在分析了拓扑控制的动机、概念、分类技术及协议栈的基础上,陈述了研究最多的四种将2D拓扑扩展到3D的情况,讨论了用于3D网络的某些拓扑控制协议,也证明了某些特性。
The importance difference between Particular Mobile Communication Network and Common Cellular Mobile Communication Network lies in the following aspects: the communication mode mainly adopts non- cellular wireless Ad Hoc and the communication object is mainly communication between objects (namely Sensor Communication) and communication topology is mainly three-dimensional (3D) stereo topology, rather than traditional two-dimensional (2D) planer topology. The topology control is one of the energy-efficient wireless Ad-Hoc and wireless sensor networking key techniques. The topology control technique has been heavily studied in wireless networks, but most of these studies assume that wireless nodes are distributed in a 2 dimensional (2D) plane, such as Common Communication Networks. In practice, however, wireless nodes of Particular Communication Networks are often deployed in a 3-dimensional (3D) space, such as multi-floor building, space, underwater, or underground. Many studies showed that current 2D topology control algorithms are not able or require complex computations to apply in 3D networks. Based on the analysis of the motives of the topology control, the concept, classification technique, and the protocol stack, presented the most studied four kind will be extended from 2D to 3D topology case, and discussed certain of the topology control protocols for 3D network, and also proved several properties in this paper.通信图 拓扑控制 节能 三维Communication Graph; Topology Control (TC ); energy efficient; Three-Dimensional (3D )Doi:10.3969/j.issn.1673-5137.2020.04.002摘 要Abstract关键词Key Words前言特种通信网是指用于某些行业(如军队、公共安全、大型企业等),能提供特种通信服务的一种专用网,或者为保障人与人、人与机、机与机之间的通信、指挥、协同、调度、情报、测控、预警等信息传递的一种专用网。
三相不间断电源的电路拓扑与控制策略精解前言在现代社会中,电力的稳定供应是不可或缺的,不间断电源(Uninterruptible Power Supply,缩写为UPS)作为一种应急电源,在电网出现故障或电源无法供应时,它能够在一定时间内为负载提供稳定的电力。
三相不间断电源(Three-Phase Uninterruptible Power Supply)是一种具有高精度、高效率和耐用性的UPS设备,广泛应用于电子信息、通信、计算机和工业自动化等领域。
本文将针对三相不间断电源的电路拓扑和控制策略进行详细介绍,希望对读者理解三相不间断电源的工作原理有所帮助。
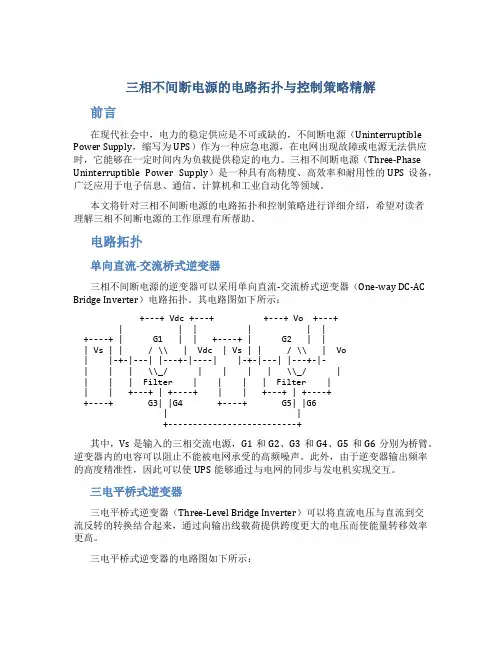
电路拓扑单向直流-交流桥式逆变器三相不间断电源的逆变器可以采用单向直流-交流桥式逆变器(One-way DC-AC Bridge Inverter)电路拓扑。
其电路图如下所示:+---+ Vdc +---+ +---+ Vo +---+| | | | | |+----+ | G1 | | +----+ | G2 | || Vs | | / \\ | Vdc | Vs | | / \\ | Vo| |-+-|---| |---+-|----| |-+-|---| |---+-|-| | | \\_/ | | | | \\_/ || | | Filter | | | | Filter || | +---+ | +----+ | | +---+ | +----++----+ G3| |G4 +----+ G5| |G6| |+--------------------------+其中,Vs是输入的三相交流电源,G1和G2、G3和G4、G5和G6分别为桥臂。
逆变器内的电容可以阻止不能被电网承受的高频噪声。
此外,由于逆变器输出频率的高度精准性,因此可以使UPS能够通过与电网的同步与发电机实现交互。
三电平桥式逆变器三电平桥式逆变器(Three-Level Bridge Inverter)可以将直流电压与直流到交流反转的转换结合起来,通过向输出线载荷提供跨度更大的电压而使能量转移效率更高。
电动汽车动力电池系统拓扑设计与控制研究摘要:随着对环境问题的重视和对石油资源的逐渐枯竭,电动汽车作为一种可持续发展的交通工具,正逐渐受到全球范围内的关注。
作为电动汽车的核心部件,动力电池系统的拓扑设计及控制研究对于实现电动汽车的高效、安全运行至关重要。
本文将以电动汽车动力电池系统的拓扑设计与控制为研究对象,深入探讨其相关技术。
关键词:电动汽车,动力电池系统,拓扑设计,控制研究,效率,安全1.引言随着全球对环境保护意识的不断提高,电动汽车逐渐成为替代传统燃油汽车的重要选择。
动力电池作为电动汽车的能量储存和供应系统,对电动汽车的性能和续航能力有着直接的影响。
因此,对动力电池系统的拓扑设计与控制进行深入研究,能够为电动汽车的高效、安全运行提供保障。
2.动力电池系统拓扑设计2.1 单体电池与电池组电动汽车的动力电池系统通常由若干个单体电池组成,而单体电池则是电池组的基本单元。
在拓扑设计过程中,需要考虑单体电池的数量、容量和连接方式等因素,以实现合理的电池组配置。
2.2 串联与并联在动力电池系统中,串联和并联是常见的连接方式。
串联连接可以增加系统的电压,提高整车性能,而并联连接则能提高系统的容量和续航能力。
拓扑设计需要根据实际需求进行合理选择,平衡电压和容量的要求。
2.3 拓扑结构优化采用不同的拓扑结构可以实现对动力电池系统的优化设计。
例如,星型结构可以提高系统的可靠性和故障容忍能力,而树形结构则适合在公交车等大型车辆中使用。
拓扑结构优化需要考虑到动力电池系统的安全性、可靠性和成本等方面的综合因素。
3.动力电池系统控制研究3.1 动力电池管理系统(BMS)动力电池管理系统是保证电池组正常运行的关键。
BMS能够监测电池组的电压、温度、容量等参数,并进行故障诊断和状态估计。
通过精确的控制策略,BMS能够延长电池组的寿命,提高整车的性能和安全性。
3.2 充放电控制策略动力电池的充放电控制对于电池组的安全性和使用寿命至关重要。
风能发电的逆变器拓扑结构与控制策略随着全球对可再生能源的需求不断增长,风能发电作为一种清洁、可持续的能源形式受到了广泛关注。
在风能发电系统中,逆变器是一个关键的组成部分,它将直流电能转换为交流电能,以供电网使用。
本文将探讨风能发电的逆变器拓扑结构与控制策略。
逆变器的拓扑结构是指逆变器中开关器件的连接方式。
常见的逆变器拓扑结构有单相桥式逆变器、三相桥式逆变器、多级逆变器等。
单相桥式逆变器是一种简单且经济实用的结构,适用于小型风能发电系统。
三相桥式逆变器则适用于中等规模的风能发电系统,具有较高的输出功率和较好的电压质量。
而多级逆变器则适用于大型风能发电系统,能够提供更高的输出电压和较低的谐波失真。
除了拓扑结构,逆变器的控制策略也是影响其性能的重要因素。
常见的逆变器控制策略有脉宽调制(PWM)控制、谐波消除控制、电流控制等。
其中,PWM控制是一种广泛应用的控制策略,通过调整开关器件的导通时间来控制输出电压的幅值和频率。
谐波消除控制则是通过改变逆变器输出电压的谐波分量来减小谐波失真。
电流控制则是通过对逆变器输出电流进行调节,以实现对输出功率的精确控制。
在风能发电系统中,逆变器的控制策略还需要考虑到风能的不稳定性。
由于风速的变化,风能发电系统的输出功率会出现波动。
因此,逆变器的控制策略需要能够快速响应风能的变化,并实现对输出功率的稳定控制。
一种常见的控制策略是最大功率点跟踪(MPPT)控制,通过调整逆变器的工作状态,使其输出功率达到最大值。
此外,还可以采用滑模控制、模糊控制等策略来实现对输出功率的稳定控制。
除了控制策略,逆变器的故障保护也是非常重要的。
由于风能发电系统通常安装在户外环境中,逆变器容易受到恶劣天气和环境条件的影响。
因此,逆变器需要具备过压保护、过流保护、短路保护等功能,以保证系统的安全运行。
综上所述,风能发电的逆变器拓扑结构与控制策略是影响风能发电系统性能的重要因素。
逆变器的拓扑结构需要根据系统规模和要求来选择,控制策略需要考虑风能的不稳定性,并实现对输出功率的稳定控制。
一、概述本文旨在探讨四相交错并联buck变换器的拓扑结构及其控制策略,该主题在新能源领域中具有重要意义。
随着新能源技术的发展和应用,电力电子变换器作为能量传输和转换的核心设备之一,对其性能和效率要求日益提高。
四相交错并联buck变换器由于其高效率、高可靠性和较小的体积,在新能源领域中得到了广泛关注。
研究该拓扑及其控制策略具有重要的理论意义和实际价值。
二、四相交错并联buck变换器拓扑结构1. 拓扑结构概述四相交错并联buck变换器是一种多输出的电力电子变换器,其主要由四个相位的buck变换器并联组成。
通过交错控制策略,可以实现四相变换器的同时输出,可以有效提高系统的输出功率和扩展输出电压范围,具有较好的适应性和稳定性。
2. 工作原理四相交错并联buck变换器在工作过程中,四个buck变换器交错工作,每个变换器的开关管调制信号相位差为90°,实现了输出功率的平衡和负载的共享。
其工作原理基于开关管的开关控制,通过合理的PWM控制方式实现输出电压和电流的稳定调节,并有效降低系统的输出纹波和损耗。
三、四相交错并联buck变换器控制策略1. 开关控制策略在四相交错并联buck变换器中,开关控制策略对系统的稳定性和效率具有重要影响。
常用的开关控制策略包括固定频率PWM控制、电流调制控制和电压调制控制等,通过合理选择开关控制策略,可以实现系统的输出稳定和效率优化。
2. 输出功率均衡策略由于四相变换器的并联结构,四个相位之间存在功率均衡和负载共享的问题。
针对此问题,可以采用动态调节电流和电压的方法,实现输出功率的均衡分配,避免系统出现过载或失衡的情况,提高系统的稳定性和可靠性。
3. 控制参数优化策略控制参数的优化对系统的性能和效率具有重要影响。
通过合理选择输出电压和电流的控制参数,可以实现系统的快速响应和动态稳定,提高系统的动态性能和抗干扰能力。
四、四相交错并联buck变换器应用研究1. 新能源领域应用四相交错并联buck变换器在新能源领域中具有广泛应用前景,可以用于太阳能发电系统、风力发电系统和电动汽车充电桩等领域,实现能量的高效转换和稳定输出,满足新能源系统的多输出需求和高效要求。

网络拓扑知识:基于网络拓扑的风机控制优化策略随着经济和技术的发展,风电产业成为了可再生能源行业中最具潜力的领域之一。
然而在风力发电中,控制风机的运行状态能够显著影响整个电站的发电效率和经济性。
因此,如何通过优化风机的控制策略来提高风电电站的效益和可靠性是当前的研究热点之一。
在风电系统中,风机拓扑结构和控制策略具有重要的影响。
风机拓扑结构指的是风机系统内部零部件的布置,包括风机叶片数量、叶片旋转方向、齿轮箱、发电机等组件的布局及其相互连接方式。
传统的风机结构主要采用三叶片、叶片轴对准风向的布置方式,但在实际应用中,更多的是采用多叶片和非对称布局的风机结构。
在风机控制策略方面,目前主要有基于固定转速和基于变速的控制策略。
基于固定转速的控制策略是指将风机的转速固定在一个常数值上进行控制。
这种策略较为简单,但是在风速变化或故障发生时很难保持风机的最佳效率。
而基于变速的控制策略则根据风速的变化动态地改变风机的转速,以保持风机的最佳效率点,并且通过提高风机的输出电压以调整输出功率,适应不同风速下的发电能力。
为提高风机控制的效益和可靠性,研究者们开始将拓扑结构与控制策略相结合。
例如,基于智能优化算法的风机控制优化方法能够通过对风机控制策略的动态调整来提高风电系统的功率输出和有功功率因数。
并且,研究者还开展了基于神经网络和遗传算法的风机控制优化方法,通过构建动态反馈控制模型和优化控制策略,使风机的发电效率得到提高。
此外,由于风电场通常由多个风机构成,风机之间的协同作用也成为了一个研究热点。
研究者们提出了基于多智能体系统的风机协同控制策略,通过在风机之间建立协同机制,实现风机之间的通信协同,进而提高整个风电系统的运行效益和稳定性。
综上所述,基于网络拓扑的风机控制优化策略有着重要的研究价值和应用前景。
其中,拓扑结构与控制策略相结合可以实现更加智能、高效的控制策略。
同时,风机之间的协同作用也是提高风电系统效益的重要手段之一。
电力推进系统中背靠背交—直流变流器拓扑分析与控制杨荣如1,印德武2【摘要】为了解决目前舰艇直流推进电力系统中变流机组机械振动和噪声大的问题,提出了一种以三相交—直流变换和三重化直—直流变换背靠背联接的交—直流双PWM变流器电路拓扑。
通过对几种中、大功率密度交—直流PWM 变流器电路拓扑的对比分析,表明了该变流器电路拓扑的优越性。
同时,构建了以“DSP+FPGA”为核心的数字控制系统,完成了实验原理样机的研制并进行了实验验证。
实验结果证实,该变换器电路拓扑不仅实现了变流机组的所有功能,而且功率密度、波形质量等得到显著提升,振动、噪声指标分别降低了20 dB和30 dB。
【期刊名称】中国舰船研究【年(卷),期】2013(000)001【总页数】6【关键词】背靠背交—直流变流器;变流机组;电力推进;静止变流器0 引言在舰艇直流电力推进系统中,往往采用变流机组来实现舰艇的直流供电。
变流机组通常由交流机组与直流机组通过机械力矩耦合构成,因具有功率大、带负载能力强、可靠性高等优点,成为舰艇供电系统的首选。
近年来,随着国内外对舰艇隐身性能的要求越来越高,变流机组存在的机械振动、噪声以及直流机组换相火花等问题,均直接或间接影响着舰艇生命力以及其战斗力的增强。
随着电力电子技术及数字控制技术的发展,以电力电子功率器件为核心的变流器技术得到了飞速发展,从而引发了各国海军对采用功率器件构成的静止变流器来替代变流机组的思考。
早在20世纪90年代,英国海军就开始了相关的理论及实践研究,目前,已研制出静止变流器产品并已装备实船。
受半导体材料及加工技术的限制,我国对静止变流器的研究起步较晚。
但由于静止变流器的军事需求,以及其在民用生产方面的用途极其广泛,近年来,在我国取得了飞速发展,一些高校和科研院所进行了广泛而深入的研究,取得了可喜的成绩。
要实现用静止变流器替代变流机组,需要解决两个问题,即静止变流器拓扑方案问题和静止变流器的控制问题。
电动汽车混合储能系统拓扑结构与控制策略综述随着能源危机和环境保护的日益重要,电动汽车作为一种清洁、低碳、高效的交通工具,受到越来越广泛的关注。
而在电动汽车中,储能系统是其最为核心的组成部分之一,因此混合储能系统成为提高电动汽车续航能力和实现节能减排的关键技术之一。
本文将从混合储能系统的拓扑以及其控制策略进行综述。
一、混合储能系统拓扑结构1. 并联式混合储能系统拓扑并联式混合储能系统是指同时包含超级电容和电池的储能系统,两部分的电能储存器通过DC/DC变换器和控制系统进行管理和协调。
并联式混合储能系统可以充分利用超级电容和电池的各自优势,实现电动汽车快速加速和能耗回收,提高起步能力并延长电池寿命。
2. 串联式混合储能系统拓扑串联式混合储能系统是指电池作为主要储能器,超级电容作为辅助储能器。
其中,电池和超级电容按照串联方式连接,通过DC/DC变换器实现储能器的电能的协调和转换。
该系统在满足大功率输出的同时,也可以保证车辆的行驶距离和供电稳定性。
3. 并串联混合储能系统拓扑并串联混合储能系统是指将超级电容和电池按照不同的方式组合起来,形成储能器单元,并通过DC/DC变换器和控制系统进行协调和管理。
该系统将超级电容和电池的优点进行融合,能够充分利用超级电容的高功率输出和电池的高能量密度,提高电动汽车的续航能力和起步性能。
二、混合储能系统控制策略1. 基于运动控制的混合储能系统控制策略。
该策略是指通过根据车辆的动态要求来控制混合储能系统,实现车辆加速、制动、转向等动态控制,提高车辆性能和安全性。
其中,超级电容和电池的功率分配策略是该策略的核心,能够合理控制储能器的负载和平衡,实现混合储能系统稳定性和可靠性。
2. 基于功率控制的混合储能系统控制策略。
该策略是指通过控制储能器的功率来实现混合储能系统的控制。
其中,动态功率分配和静态功率分配是两种主要的控制策略。
动态功率分配可以根据车辆的实际需求来动态调整储能器功率的分配,提高车辆的加速和能量回收能力;静态功率分配可以通过预设规则来控制储能器的功率分配,实现车辆的平稳行驶和节能减排。
拓扑控制
1 拓扑控制的意义
无线网络一般具有环境复杂、节点资源受限、网络拓扑不稳定的特点. 不同
于有线网络,无线网络可以通过改变各个网络节点传输功率以改变网络的拓扑结
构,这就是拓扑控制的实现技术基础。由节点的位置和其无线传输范围所确定的
网络拓扑结构对网络的性能有着重大的影响. 如果拓扑结构过于松散,就容易产
生网络分区以及增大端到端的时延;相反的,非常密集的拓扑不利于空间重利用,
从而减小网络的容量[2]。拓扑管理和控制主要研究如何为节点分配功率以获得具
有某种性质的拓扑结构和优化一些网络目标函数,其目的就是提高网络的性能,
降低通信干扰和延长网络的生存时间。
拓扑控制技术是无线网络中最重要的技术之一。在由无线传感器网络生成的
网络拓扑中,可以直接通信的两个结点之间存在一条拓扑边。如果没有拓扑控制,
所有结点都会以最大无线传输功率工作。在这种情况下,一方面,结点有限的能
量将被通信部件快速消耗,降低了网络的生命周期。同时,网络中每个结点的无
线信号将覆盖大量其他结点,造成无线信号冲突频繁,影响结点的无线通信质量,
降低网络的吞吐率。另一方面,在生成的网络拓扑中将存在大量的边,从而导致
网络拓扑信息量大,路由计算复杂,浪费了宝贵的计算资源。因此,需要研究无
线传感器网络中的拓扑控制问题,在维持拓扑的某些全局性质的前提下,通过调
整结点的发送功率来延长网络生命周期,提高网络吞吐量,降低网络干扰,节约
结点资源。
拓扑控制主要研究如何在保证网络连通性的前提下,设计高效的算法为节点
分配功率以获得具有某种性质的拓扑结构和优化一些网络目标函数,其目的就是
节约节点的发射功率,延长网络的生存时间,提高网络的性能。拓扑控制是无线
网络设计和规划的重要组成部分。
拓扑控制技术保证覆盖质量和连通质量,能够降低通信干扰、节省能量,提
高MAC(media access control)协议和路由协议的效率。进一步,也可为网络融合
提供拓扑基础;此外,拓扑控制还能够提高网络的可靠性、可扩展性等其他性能.
总之,拓扑控制对网络性能具有重大的影响,因而对它的研究具有十分重要的意
义。
无线网络的特点使拓扑控制成为挑战性研究课题,同时,这些特点也决定了
拓扑控制在无线网络研究中的重要性。
2 拓扑控制算法
拓扑控制算法是实现拓扑控制的计算方法,良好的拓扑控制算法将获得计算
时间、空间和通讯需求的优势。文献中提出一种基于邻近图MST模型的
LMST(Local Minimum Spanning Tree) 节点功率控制算法。文献中定义MST如下:
图G(V,E)的子图'E为一棵包含了G所有顶点的树。'E的所有边的权值的和称
为'E的权值,则最小权值树称作图G的最小生成树(Minimum Spanning Tree,
MST)。
在LMST算法中,任意一个节点u在发送半径范围R内探测确定自身的邻
居节点集合RuN,节点。及其邻居节点集合RuN之间的连线构成邻居子图RuG。图
R
u
G
中边的权值是以边的长度,即边的两个端点之间的欧氏距离来确定的。因为
无线通信中,能量消耗E和距离d的关系满足式E=knd,其中,参数n的取值范
围为24n。这意味着随着通信距离的增加,能耗急剧增大。E严格随d增大
而增大,因此可以使用d作为边的权值。对节点(1u,1v),(2u,2v)通过以下的
公式确定唯一的权值'd:
''
11221122
(,)(,)(,)(,)duvduvduvduv
Or 11221122((,)(,)&&max{(),()}max{(),()}duvduviduidviduidv
Or 11221122((,)(,)&&max{(),()}max{(),()}duvduviduidviduidv
&
1122
&min{(),()}min{(),()}iduidviduidv
这样以'd作为权值,在RuG范围内进行最小生成树算法得到本地最小生成树
uT。RuG中各节点将生成的最小生成树u
T
上与自身距离为一跳的节点设为邻居节
点,并调整发射功率为达到最远邻居节点的功率,减少网络中不必要的链路,从
而形成网络拓扑。
在LMST算法中,假设每一个节点都有一个唯一的ID,并且知道自身的位
置,具有全向天线。假设信道是对称的,无线信号在传播中无障碍。LMST算法
中网络拓扑的建立主要分为三个阶段:
①信息交换:信息需要通过每个节点u在拓扑结构处理中的所有在RuN中的
信息,这可以获得每个节点用其最大功率来传播的周期性Hello消息最大传输功
率。至少应当包括节点ID和节点位置。这些定期的信息可以发送任何数据信道
或在一个单独的控制信道 .传输hello信息的两个时间间隔决定节点移动水平,将
取决于网络模型.
②拓扑结构:可见邻近RuN的信息获取之后,每个节点u独立地用prim算法
在图RuG中获取它的本地最小生成树((),())uuuTvTET,prim算法的时间复杂度为
(loglog)(log)OnnenOen
,在图uG中n是节点数,e是边数。
③传输功率的决定:假设所有节点的最大传输功率是已知且相同。通过测量
接收Hello信息的功率可以确定节点到达邻近节点的功率
算法特点总结:在LMST算法中,每个节点根据其本地拓扑结构(由一跳
邻居节点形式的拓扑),计算最小生成树,然后使其直接的一跳内的节点成为其
邻居,最后把节点的传输半径设为到达其邻居最远的一跳邻节点所需距离。
LMST算法的缺点:LMST算法导出的拓扑维护了网络的连通性。节点的平
均传输半径小并且每个节点的节点度(degree)一般不超过6。虽然LMST算法
建立的拓扑具有较高的功率有效性但维护困难。每个节点需要定期地运行该算法
以保障网络的连通性。
无线网络拓扑控制研究的发展趋势是以实际应用为背景,多种机制相互融合,强
调网络拓扑控制的自适应性和鲁棒性,在保证网络的连通性和覆盖度的前提下,
提高网络的通信效率,最大限度地节省能量,延长整个网络的生存时间,提高网
络性能。