基于BECKHOFF+TwinCAT的开放式数控系统软件开发
- 格式:pdf
- 大小:1.70 MB
- 文档页数:65
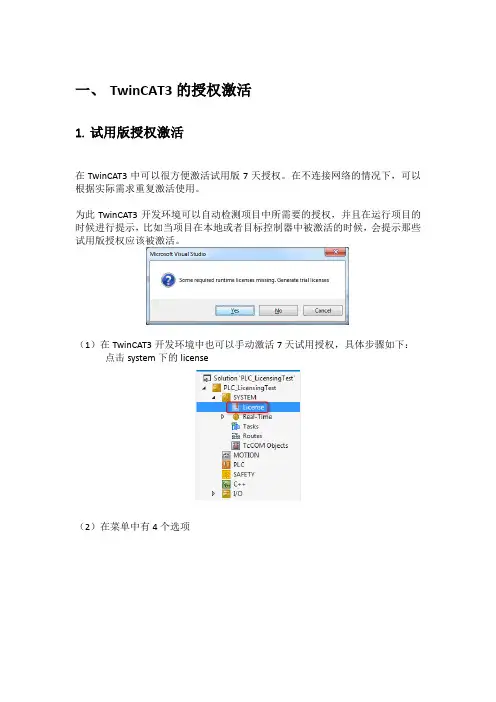
一、TwinCAT3的授权激活1.试用版授权激活在TwinCAT3中可以很方便激活试用版7天授权。
在不连接网络的情况下,可以根据实际需求重复激活使用。
为此TwinCAT3开发环境可以自动检测项目中所需要的授权,并且在运行项目的时候进行提示,比如当项目在本地或者目标控制器中被激活的时候,会提示那些试用版授权应该被激活。
(1)在TwinCAT3开发环境中也可以手动激活7天试用授权,具体步骤如下:点击system下的license(2)在菜单中有4个选项Order Information(Runtime):试用版和正版激活选项Manager Licenses:可以手动勾选所需要的licensesProject Licenses:当前项目所用到的licensesOnline Licenses:激活过的licenses或者曾经激活过的licenses(3)首先选择manager licenses,在Add License中勾选所需要的License(4)之后回到order information选型,点击Activate 7 Days Trial License,随后会弹出验证码方框,输入5位验证码,大小写有区分(5)输入正确后点击OK会弹出窗口告知7天的试用版license已经生成,这样我们就可以有7天的授权可以用,如果过期了再次用同样的方法激活就可以了Q:在对目标控制器操作7天试用版激活的时候,发现目标控制器始终无法切换到run-mode,并且在license选项卡中发现所做7天授权当前状态如下:license issue time in the future?A:主要原因是目标控制器的系统时间和本地PC不一致导致,解决方式只需要把目标控制器系统时间手动修改成和本地PC一直即可。
2.IPC/EPC中的完整版授权激活通常TC3授权和硬件一起购买是不需要我们自己完成授权工作的,只有当授权单独购买,或者后续补丁授权,就需要自己完成这些步骤。
twincat eni文件生成方法-概述说明以及解释1.引言1.1 概述Twincat是一款由德国Beckhoff公司开发的自动化软件平台,它可以用于控制工程、运动控制、HMI(人机界面)和数据采集等领域。
在Twincat 中,eni文件是一种重要的配置文件,它包含了工程项目的各种信息,如硬件配置、通信设置、变量声明等。
在本文中,我们将重点讨论Twincat eni文件的生成方法。
通过了解如何生成eni文件,我们可以更好地理解Twincat工程项目的配置过程,提高工程开发的效率和质量。
同时,掌握eni文件的生成方法也有助于我们更好地应用Twincat软件平台,实现自动化控制系统的设计和实施。
因此,本文对于Twincat开发者和工程师具有重要的参考价值。
1.2文章结构文章结构部分主要描述了整篇文章的组织结构和内容安排。
在本文中,文章结构如下:1. 引言1.1 概述1.2 文章结构1.3 目的2. 正文2.1 Twincat eni文件的概念和作用2.2 Twincat eni文件生成方法2.3 Twincat eni文件的应用场景3. 结论3.1 总结Twincat eni文件生成的重要性3.2 未来发展趋势展望3.3 结束语通过以上结构,读者可以清晰地了解到本文将分为引言、正文和结论三个部分,每个部分具体包含的主题内容。
文章结构的合理安排有助于读者更好地理解文章内容,同时也能够使文章看起来更有条理和逻辑。
1.3 目的Twincat eni文件生成方法是为了帮助工程师更有效地创建ENI文件,提高开发效率和质量。
通过了解ENI文件的概念和作用,以及掌握生成方法,工程师可以更好地理解和控制设备和控制系统之间的通讯方式。
同时,本文旨在指导工程师在实际项目中如何应用Twincat eni文件,以满足不同的应用场景需求。
最终,本文旨在强调Twincat eni文件生成的重要性,并展望其未来发展趋势,为读者提供全面的知识和实践指导。
Twincat3 指针1. 什么是 Twincat3?Twincat3 是由德国贝加莱(Beckhoff)公司开发的一款工业自动化软件平台。
它提供了一个集成的开发环境,用于编写、调试和测试各种自动化控制系统。
Twincat3 是基于 Windows 操作系统的,它的设计目标是提供高效、可靠和灵活的自动化解决方案。
2. 指针在 Twincat3 中的作用在 Twincat3 中,指针是一种特殊的变量类型,它存储了一个内存地址,可以用来访问和操作内存中的数据。
指针在编程中扮演着非常重要的角色,它可以提供灵活性和效率,使程序能够更好地管理和利用内存资源。
指针在 Twincat3 中的主要作用有以下几个方面:2.1 内存管理指针可以用来动态分配和释放内存。
在 Twincat3 中,可以使用指针来创建动态数组或者动态数据结构,这样可以根据实际需要在运行时分配和释放内存,提高内存利用率。
2.2 数据传递指针可以用来传递大型数据结构或对象,避免了数据的复制和传输过程中产生的额外开销。
通过传递指针,可以直接访问和操作内存中的数据,提高了程序的效率。
2.3 数据共享指针可以用来实现数据的共享和同步。
在多个任务或线程之间共享数据时,可以使用指针来访问和修改共享内存区域,实现数据的同步和共享。
2.4 数据结构的操作指针可以用来操作复杂的数据结构,如链表、树等。
通过指针,可以方便地遍历和操作数据结构,实现各种高级的数据操作算法。
2.5 外部设备的访问指针可以用来访问外部设备的内存映射区域,实现对外部设备的控制和通信。
通过指针,可以直接读写外部设备的寄存器或内存区域,实现与外部设备的高效交互。
3. Twincat3 中指针的使用在 Twincat3 中,使用指针需要注意以下几点:3.1 指针的定义和初始化在 Twincat3 中,可以使用VAR_POINTER关键字来定义一个指针变量,并使用ADR 函数来初始化指针变量。

---------------------------------------------------------------最新资料推荐------------------------------------------------------TwinCAT从入门到精通TwinCAT 2.0 从入门到精通第 2 章_编程入门2. 编程入门2.1. 概述 2.2. 在编程 PC 上安装 TwinCAT 开发环境在 CX 端,所有软件及授权为出厂预装,用户可以直接使用。
在 PC 端,需要安装 TwinCAT 软件。
建议从 Beckhoff DVD 安装的,完成后会自动安装 Beckhoff Information system,不仅包含了所有 TwinCAT 帮助文档,还包含所有 BECKHOFF 硬件产品的 User Manual。
对于32 位系统,可以直接运行Beckhoff DVD 上的\software\TwinCAT\Setup.exe 进行安装,但是对于 64 位系统,就必须用专门的安装文件,比如“Tc211x64Engineering_R3_2.11.2232” 进行安装,并且只能用于对 32 位的控制器编程和配置,而不能在开发 PC 上进行仿真运行和调试。
2.2.1. 在PC 上安装TwinCAT 开发环境在浏览器中打开BECKHOFF DVD,定位到 TwinCAT 安装文件,双击运行。
如图所示:点击 Next:第 1 页共 53 页2013-9-10本文纯属个人经验,非 Beckhoff 公司正式发行,如有疑问,请直接联系作者:BCGZ Lizzy Chen1/ 55TwinCAT 2.0 从入门到精通第 2 章_编程入门选择 I accept the terms of liscence agreement,点击 Next:第 2 页共 53 页2013-9-10本文纯属个人经验,非 Beckhoff 公司正式发行,如有疑问,请直接联系作者:BCGZ Lizzy Chen---------------------------------------------------------------最新资料推荐------------------------------------------------------ TwinCAT 2.0 从入门到精通第 2 章_编程入门输入用户名和公司名称,如果是授权用户,输入序列号。

twincat plc 编程手册2011《Twincat PLC编程手册2011》是一本集中介绍Twincat PLC编程相关知识和技巧的书籍。
本文将简要介绍该书,并列举其中一些重要的主题和内容。
Twincat是Beckhoff公司开发的一款用于控制系统的软件平台,可用于编写和运行PLC程序。
《Twincat PLC编程手册2011》是一本详细讲解Twincat PLC编程的指南,提供了对Twincat PLC编程基础和高级概念的介绍,以及实际案例和技巧的分享。
该书的主要内容包括以下几个方面:1. Twincat基础知识:介绍Twincat的基本概念,包括PLC编程的基本原理、Twincat的工作方式和组件等。
此外,还介绍了编程语言、数据类型、变量和常量等基本概念。
2.编程语言和语法:详细介绍了Twincat所支持的编程语言,包括结构化文本(ST)、有序功能图(SFC)、连续功能图(CFC)和指令列表(IL)等。
针对每种语言,书中都提供了丰富的示例和代码片段,以便读者更好地理解和应用。
3.逻辑和运算符:讲解了Twincat中的逻辑和运算符,包括数学运算、比较运算、逻辑运算和位运算等。
对于每个运算符,书中都给出了详细的语法和示例,便于读者在实际编程中灵活运用。
4.数据处理和存储:介绍了Twincat中的数据处理和存储的相关技术。
包括数据类型转换、数组和结构体的定义和使用、以及文件的读写和存储等。
此外,还介绍了Twincat中常用的数据库和通信协议。
5.调试和错误处理:讲解了Twincat中的调试技术和错误处理的方法。
涵盖了断点调试、变量监视、日志记录和异常处理等。
书中还提供了一些常见问题和解决方案,有助于读者快速排查和修复错误。
除了上述内容,该书还包括了一些高级主题,如界面设计、性能优化和网络通信等。
同时,作者还结合一些实际案例,向读者展示了如何应用Twincat PLC编程解决实际问题。
总之,《Twincat PLC编程手册2011》是一本综合性的Twincat PLC编程指南,涵盖了Twincat PLC编程的方方面面。
窗口控制和自动化技术TwinCAT 快速入门最后一次修改日期:2001.12.11目录TwinCAT 快速入门1. 使用TwinCAT和系统需求简介 (3)2. 安装 (4)启动安装程序 (4)安装结束 (11)3. TwinCAT PLC 控制 (13)概貌 (13)PLC 标准化语言 IEC 61131-3 (14)4. TwinCAT 系统管理器 (17)概貌 (17)5. TwinCAT 观测器 (18)概貌 (18)6. 示例程序 (19)示例 Maschine.pro (19)跟随程序流程 (27)7. 示例程序转换 (31)变量声明 (31)设置总线端子 (32)8. Visual Basic 链接 (41)编程接口 ADS OCX (41)示例程序 (42)1. 使用TwinCAT和系统需求简介本简介的目的是在没有详细地了解TwinCAT的情况下,为读者快速地提供概貌的可能性。
解释是在运用一个应用实例,并在各个章节中逐步展开而进行的。
程序的各个指令可参考详细信息。
系统需求486 及以上处理器要使TwinCAT运行,你需要一台486及以上处理器的PC。
计算机还必须具备数学运算协处理器。
该处理器集成在486DX, DX2 或 DX4 处理器中。
在有486SX 或 SX2 处理器的情况下,可以用处理器超频而使计算机升级,使其具有协处理器。
至少具有16 MB RAM计算机必须至少具备16 MB RAM。
如果应用程序较大,或还有附加的软件需要和TwinCAT同时运行时,则需要增加内存。
Windows NT/2000 操作系统TwinCAT 只能在 Windows NT/2000 操作系统下运行。
不能在Windows NT V3.x, Windows 95 或Windows V3.x 16-位操作系统下运行。
演示程序需求你需要以下的软件和硬件才能运行演示程序:- TwinCAT 版本 2.0 或以上- Microsoft Visual Basic 版本 4.0 或以上- 用于 Lightbus I/O 的 PC 接口卡 (FC2001)- 用于 Lightbus I/O 的总线偶合器 (BK2000)- 2 块带 2 个数字输出的总线端子 (KL2032)- 总线末端端子 (KL9010)- 导线材料(光纤电缆,标准连线等)- 24V 电源单元演示套装件:演示程序所需的硬件包含在 Beckhoff Lightbus 的演示套装件中。
硕士学位论文基于BECKHOFF TwinCAT的开放式数控系统软件开发RESEARCH ON THE SOFTWARE OF OPEN CNC SYSTEM BASED ONBECKHOFF TWINCAT史小磊哈尔滨工业大学2011年6月国内图书分类号:TH164 学校代码:10213国际图书分类号:621 密级:公开工学硕士学位论文基于BECKHOFF TwinCAT的开放式数控系统软件开发硕士研究生:史小磊导 师:付云忠 副教授申请学位:工学硕士学科:机械制造及其自动化所在单位:机电工程学院答辩日期:2011年6月授予学位单位:哈尔滨工业大学Classified Index:TH164 School code:10213 U.D.C:621 Classification:publicityDissertation for the Master Degree in EngineeringRESEARCH ON THE SOFTWARE OF OPEN CNC SYSTEM BASED ONBECKHOFF TWINCATCandidate:Shi XiaoleiSupervisor:Fu YunzhongAcademic Degree Applied for:Master of Engineering Speciality:Mechanical Manufacturing andAutomationAffiliation:School of Mechatronics Engineering Date of Defence:June, 2011Degree-Conferring-Institution:Harbin Institute of Technology哈尔滨工业大学工学硕士学位论文摘要开放式数控系统以其开放化、通用性以及彼此兼容等特点,解决了传统数控系统封闭性的问题,很好地适应了现代制造业中小批量生产的需求,已经成为现代数控系统发展的重要方向。
本文分析了基于PC的开放式数控系统的三种基本结构形式,并结合当前实验室的条件,采用了“PC+运动控制器”的结构方案。
运动控制器采用德国BECKHOFF嵌入式计算机及其组件,在硬件结构基础上进行开放式数控系统软件开发。
根据对实时性要求的不同,开放式数控软件可划分为两部分:上位机软件和下位机软件。
下位机软件部分实时性较强,实现实时控制功能,也称下位机控制软件,主要在TwinCAT环境下开发,包括模式选择模块、程序预处理模块、译码模块以及插补运算模块等。
模式选择模块为本次软件开发的核心,根据需要共设计三种运行模式:自动插补模式、MDI模式和点动模式。
上位机软件部分实时性较弱,主要完成非实时控制功能,也成上位机管理软件,主要是利用VC++软件开发,包括初始化模块、程序编辑模块及通讯模块等。
初始化模块主要负责完成通讯端口及通讯参数的初始化;程序编辑模块主要完成程序的编写、存储及下载等功能;通讯模块则借助于添加的动态链接库TcAdsDll 实现与下位机软件实时通讯。
软件开发基本完成后,可在TwinCAT System Manager提供的虚拟运行环境下进行测试,对不合理之处进行修改。
由于虚拟环境与实际运行环境有一定偏差,因此有必要进行实验验证。
实验部分主要是验证开放式数控软件的运动控制功能和轨迹控制功能,判断软件是否能够执行基本的插补控制。
虚拟运行测试与实验相结合,共同验证软件控制的可行性。
关键词:开放式数控系统;上位机软件;下位机软件;TwinCAT;轨迹控制- I -哈尔滨工业大学工学硕士学位论文AbstractWith the characteristic of opening, universal and compatible with each other, the open CNC system has solved the closed issues of traditional CNC system, well adapted to the needs of medium and small batch in modern manufacturing and become an important direction of modern CNC system.This paper analyzed three basic structural forms of the open CNC system based on PC, and used the structure of “PC + the motion controller”. The software development of open CNC system was carried out based on Motion controller and other hardware components, which were Germany BECKHOFF embedded computer. According to the different requirements of real-time, the software of open CNC system can be divided into two parts: the PC software and the lower position machine software.The lower position machine software, also known as lower computer control software, had stronger real-time, achieved the real-time control functions and was developed by TwinCAT PLC. It consisted of the operation selection module, program preprocessing module, decoding module and interpolation operations module. The operation selection module was the core of software development, and was designed to three modes: Automatic interpolation mode, MDI mode and Jog mode.The PC software, also known as PC management software, had weaker real-time and mainly completed non-real-time control function. It was developed by VC++ software, which included the initialization module, program editing module and communication module. The initialization module mainly accomplished initialization of communication port and parameters. Program editing module achieved the programing, storage and downloading functions. Communication module completed communication function with lower software by adding the dynamic link library TcAdsDll.After the completion of software development, it can be tested in a virtual operating environment provided by TwinCAT System Manager and modified for unreasonable functions. As the deviation between the virtual environment and the actual operating environment, it was necessary to take experiments. The experiment mainly verified motion control function and trajectory control function of open CNC software, to determine whether the software can perform basic interpolation control. Virtual operation test and experiment were combined for verifying the feasibility of the software control.Keywords:open CNC system, the PC software, the lower position machine software, TwinCAT, trajectory control- II -哈尔滨工业大学工学硕士学位论文目录摘要 (I)Abstract (II)第1章绪论 (1)1.1 课题背景 (1)1.1.1 开放式数控系统的产生背景 (1)1.1.2 开放式数控系统的优势 (2)1.2 开放式数控系统的研究现状及发展趋势 (2)1.2.1 数控系统的发展历程 (2)1.2.2 开放式数控系统的研究现状 (3)1.2.3 开放式数控系统的发展趋势 (5)1.3 开放式数控系统体系结构的划分 (6)1.4 本文主要研究目的和研究内容 (7)第2章开放式数控软件开发的理论基础及总体设计 (9)2.1 开放式数控软件的功能要求 (9)2.2 开放式数控软件开发的总体思想 (9)2.2.1 软件开发的指导思想 (9)2.2.2 软件开发的基本原则 (10)2.3 基于TwinCAT环境的开放式数控软件开发的总体设计方案 (10)2.3.1 数控软件功能模块的划分 (10)2.3.2 基于TwinCAT环境的数控软件开发的设计方案 (11)2.4 本章小结 (13)第3章基于TwinCAT环境的下位机控制软件开发 (14)3.1 基于TwinCAT的下位机控制软件开发介绍 (14)3.1.1 下位机控制软件功能模块的划分 (14)3.1.2 下位机软件的开发平台 (15)3.2 基于TwinCAT的下位机软件基本功能开发 (17)3.2.1 自动插补模式开发 (17)- III -哈尔滨工业大学工学硕士学位论文3.2.2 MDI模式开发 (19)3.2.3 点动模式开发 (21)3.2.4 辅助控制功能开发 (23)3.3 基于TwinCAT的译码模块的功能完善 (24)3.3.1 译码模块介绍 (24)3.3.2 译码模块功能补充 (25)3.4 基于TwinCAT的下位机软件虚拟测试 (28)3.4.1 下位机软件虚拟运行环境的配置 (28)3.4.2 下位机控制软件运行调试 (29)3.5 本章小结 (30)第4章基于VC++的上位机管理软件开发 (31)4.1 基于VC++的上位机软件开发介绍 (31)4.1.1 上位机管理软件功能模块的划分 (31)4.1.2 上位机管理软件的开发工具 (32)4.2 VC++与TwinCAT自动化软件通讯接口的实现 (33)4.2.1 专用接口文件 (33)4.2.2 通讯接口实现 (33)4.3 基于VC++的上位机管理软件核心模块开发 (34)4.3.1 初始化模块开发 (34)4.3.2 上位机管理软件功能模块开发 (35)4.4 基于VC++的上位机软件运行调试 (36)4.4.1 上位机软件功能测试 (36)4.4.2 测试结果分析 (38)4.5 本章小结 (39)第5章基于TwinCAT的开放式数控软件实验研究 (40)5.1 实验方案 (40)5.2 运动控制实验 (40)5.2.1 实验硬件组件 (40)5.2.2 运动控制验证 (43)5.3 轨迹控制实验 (45)5.3.1 轨迹控制的实验设计 (45)- IV -哈尔滨工业大学工学硕士学位论文5.3.2 数据采集程序的设计 (46)5.3.3 数据采集与处理 (46)5.3.4 实验结果分析 (50)5.4 本章小结 (50)结论 (51)参考文献 (52)哈尔滨工业大学学位论文原创性声明及使用授权说明 (55)致谢 (56)- V -哈尔滨工业大学工学硕士学位论文第1章绪论1.1课题背景1.1.1开放式数控系统的产生背景随着制造业的不断发展,中小批量生产在现代生产中所占的比重不断上升,这就对机床的通用性和柔性提出了很高的要求,希望机床实现配置灵活、功能扩展简单并且基于一致的规范要求,能够满足用户多样化的需求,针对不同产品能够实现多种加工工艺。