谈虚拟现实中的碰撞检测问题(打)
- 格式:pdf
- 大小:200.51 KB
- 文档页数:3
第22卷第5期2010年5月计算机辅助设计与图形学学报Journal of Computer 2Aided Design &Computer GraphicsVol.22No.5May 2010收稿日期:2009-06-01;修回日期:2009-10-16.基金项目:“十一五”总装预先研究资助项目(51318010205);国家自然科学基金(50805009).侯伟伟(1984—),男,博士研究生,主要研究方向为虚拟装配、物理建模;宁汝新(1942—),女,教授,博士生导师,主要研究方向为数字化设计与制造;刘检华(1977—),男,博士,副教授,主要研究方向为虚拟现实、虚拟装配.虚拟装配中基于精确模型的碰撞检测算法侯伟伟,宁汝新,刘检华(北京理工大学机械与车辆学院 北京 100081)(houweiwei @ )摘要:针对目前虚拟装配中由多边形模型引起的碰撞检测准确性低的问题,提出一种考虑公差信息的精确碰撞检测算法.首先进行分层的多边形碰撞检测,获得发生碰撞的多边形;然后基于层次图像数据将发生碰撞的多边形映射到零件相应的几何上;再依据几何的公差信息计算碰撞阈值;最后根据碰撞阈值进行精确碰撞判定.实例验证结果表明,文中算法在保证虚拟装配系统实时性的同时,提高了碰撞检测的准确性.关键词:虚拟装配;精确模型;精确碰撞检测中图法分类号:TP391.9A Collision Detection AlgorithmB ased on Accurate Models in Virtual AssemblyHou Weiwei ,Ning Ruxin ,and Liu Jianhua(S chool of Mechanical Engi neeri ng ,Bei j ing I nstit ute of Technolog y ,B ei j ing 100081)Abstract :An accurate collision detection algorit hm co nsidering tolerance information is p roposed to solve t he problem of low accuracy in collision detection due to polygonal models in virt ual assembly currently.The algorit hm mainly consist s of t he following four part s :first ,hierarchical collision detection of polygonal models is carried out to obtain collided polygons ;second ,collided polygons are mapped to geomet ries using hierarchical image data ;t hird ,collision t hreshold is comp uted based on tolerance of geomet ries ;fourt h ,accurate collision detection is carried out based on collision t hresholds.Experiment s show t hat t his algorit hm p rovides more accurate result t han common algorit hms and meet s t he real time requirement of virt ual assembly at t he same time.K ey w ords :virt ual assembly ;accurate model ;accurate collision detection 近年来,虚拟装配作为虚拟现实技术在机械制造领域中的一个典型应用,已经引起国内外学者和企业越来越广泛的重视.在机械产品开发过程中,运用虚拟装配技术可以进行装配过程仿真、可装配性验证与分析、装配工艺规划、装配工人培训、装配现场指导等,因此越来越多的企业将虚拟装配技术运用于机械产品的开发.碰撞检测是构成虚拟装配系统功能的基本要素,也是进行虚拟装配仿真的前提.碰撞检测算法不仅要满足虚拟装配系统实时性的要求,而且要满足工业应用所需的准确性要求.目前,国内外对于碰撞检测算法的研究主要集中于提高碰撞检测算法的效率上.Zhang 等[1]提出了一种基于采样的使用局部规划在配置空间求解无碰撞路径的算法;Figueiredo 等[2]采用交迭的轴向包围盒快速过滤不相交对象以提高碰撞检测效率;G ovindaraju 等[3]采用图像卡进行大规模场景中对象间快速碰撞检测;刘晓平等[4]运用空间层次划分技术寻找多面体中充分接近的三角面片,通过计算空间多面体之间距离实现碰撞检测;武殿梁等[5]用一种并行、基于区域分割和快速相交检验排序的分解算法来构造包围盒层次模型,检测计算时依据用户的操作动态决定碰撞检测对,以减少检测计算量;郑轶等[6]提出了基于分层次剖分的快速碰撞检测方法,通过综合运用空间剖分法和层次包容盒法快速地减少需要检测的基本几何元素对数,利用虚拟装配过程的时空连贯性,通过引用模型缓存和冗余面片索引技术减少计算量和内存占用.但是,上述碰撞检测算法应用到虚拟装配中时都存在着不足,所采用的多边形模型在图像显示和碰撞检测方面虽然具有较大优势,但由于多边形模型中缺乏精确几何信息和工程语义信息,造成了碰撞检测的准确性低,直接影响了虚拟装配系统的数据准确性,限制了虚拟装配在工业中的应用.本文针对虚拟装配中碰撞检测算法的准确性低问题,采用一种精确几何模型(ACIS模型)作为系统的底层模型,同时引入公差信息,在多边形碰撞检测的基础上进行精确几何层的碰撞检测,提高了碰撞检测的准确性.1 虚拟装配系统中的碰撞问题描述碰撞检测的一个根本问题是确定产品数字模型处于何种关系时实际模型才会发生碰撞.实际中,当2个零件间的距离为0时就发生碰撞.但是在虚拟装配研究中,如果依据“当2个零件间的距离为0时发生碰撞”的理论来进行碰撞检测,则不能满足虚拟装配技术的要求,原因如下:1)在仿真中零件间的距离是离散变量,很少等于0.由于仿真算法在计算零件位置的迭代中采用了离散的时间步,零件的运动不是连续的.即使选用足够小的离散步长使得零件的运动看起来是连续的,而在本质上零件还是从空间一个位置跳跃到另外一个位置.在碰撞检测过程中,零件在这个时间点还处于分离状态,在下一个时间点就相互穿透.2)计算机中无法对零件进行精确的表达.精确建模方法是对零件无误差理想状态的一种表示,而多边形模型是一种近似描述,两者都是采用不同的方法对物体的一种近似表达,都与实体物体存在一定的差别.因此对这些模型进行碰撞检测的结果不能够完全反映实际产品的碰撞情况.如何通过对计算机模型的碰撞检测来反映实际产品的碰撞情况,是虚拟装配中必须要解决的一个基本问题.机械产品由于其功能要求在设计和制造时有公差的要求,通过引入公差信息,在碰撞检测时考虑零件的公差要求,通过对精确几何级的碰撞检测来反映实际产品的碰撞情况,如图1所示.零件模型包括多边形模型和精确几何模型,精确几何模型即ACIS模型,其上附加有零件的公差信息,对精确几何模型离散后可以得到多边形模型.图1 机械产品碰撞检测 为了便于对零件间碰撞的描述,引入如下变量:接近距离阈值d n为零件间所允许的最小接近距离,穿透深度阈值d p为零件间所允许最大穿透深度,距离δn为零件相互接近过程时的距离,穿透深度为δp为零件相互穿透时的穿透深度,如图2所示.虚拟装配中零件间碰撞的定义如下: 897计算机辅助设计与图形学学报 第22卷图2 碰撞的定义 2个零件相互接近过程中,当δn >d n 时,零件间不会发生碰撞;当δp >d p 时,零件间发生碰撞.2个零件互相分离过程中,当δn <d n 时,零件间发生碰撞.当δn >d n 时,零件间才不发生碰撞.图4 多边形碰撞检测2 精确碰撞检测基于上述碰撞定义,在多边形碰撞检测的基础上,面向虚拟装配的精确碰撞检测算法主要包括多边形碰撞检测、几何映射、阈值计算和碰撞判定4个环节,如图3所示.多边形碰撞检测即一般意义上的碰撞检测,主要负责由CAD 模型或中性文件构造系统的多边形碰撞检测模型,并对零件进行碰撞检测,其结果是发生碰撞的零件对及相应的多边形对.多边形碰撞的结果只能反映零件近似数字模型间的碰撞情况,而不能反映实际产品的碰撞情况.几何映射是将发生碰撞的多边形对映射到零件的几何上;采用一种层次的图形数据结构快速地将发生穿透的多边形映射到相应的几何上;然后依据发生穿透的零件几何的公差信息计算几何的允许阈值,即穿透深度阈值和接近距离阈值;最后由多边形碰撞信息和几何的阈值信息综合判定零件间的碰撞情况.图3 精确碰撞检测流程2.1 多边形碰撞检测多边形碰撞检测一般包括数据预处理和碰撞997第5期侯伟伟,等:虚拟装配中基于精确模型的碰撞检测算法检测2个阶段,如图4所示.数据预处理阶段主要是把CAD 模型转换成虚拟装配系统支持的中性文件,再将该中性文件读入到虚拟装配系统中,并由该中性文件所包含的零件模型的信息构造碰撞检测模型.碰撞检测则判断零件由当前位置移动到下一位置时是否发生碰撞,为了提高碰撞检测的效率以满足虚拟装配系统实时性要求,采用分层的碰撞检测算法依次进行包围盒层、包围块层以及面片层碰撞检测.多边形碰撞检测的结果是发生碰撞的零件对以及相应的多边形对.一般意义上的碰撞检测由多边形模型的碰撞检测结果来判定零件间是否发生碰撞,如果多边形碰撞检测模型发生碰撞,那么零件间就发生碰撞.由前述分析可知,由于多边形模型与实际零件存在一定的差别,多边形模型的碰撞情况不能够准确地反映实际产品的碰撞情况,这种判别方法的准确性较差,远远不能满足实际工程的需求.图5 图形数据结构2.2 几何映射在进行多边形碰撞检测的基础上,将多边形碰撞检测结果映射到零件的几何上,由几何的公差信息和多边形的碰撞结果信息来判定零件间的碰撞情况.几何映射的主要功能是将发生碰撞的多边形映射到零件的几何上,从而进行几何级的碰撞检测.由于产品CAD 模型离散得到的多边形模型包含的多边形数量庞大,如何高效、准确地将多边形映射到相应几何上成为影响该算法效率的关键因素.如果为每个零件开辟额外的空间存储其所包含的几何以及几何包含的多边形数组,不仅会占用大量的存储空间而且难以保证运行效率,因此,本文提出一种基于图形数据的映射算法.该算法的关键是建立一种分层的图像数据结构,一个零件在图形数据库中为一个节点,节点下面包含组成该零件的壳(SH ELL )节点,SH ELL 节点下面包含组成该SH ELL 的面节点,面节点下面存储组成该面的多边形信息,如图5所示.基于该图像数据结构,在获得发生碰撞的多边形对后,由该多边形对向上回溯即可得到对应的所属的几何信息.该方法不需要额外开辟空间来存储零件模型的多边形节点信息,能够高效、准确地获得多边形所属的几何特征.2.3 穿透深度阈值和接近距离阈值的计算将发生碰撞的多边形映射得到零件间的几何后,对于每一个包含公差信息的几何面计算其穿透深度阈值和接近距离阈值;对于不包含公差信息的几何面按照一般加工精度处理.尺寸公差依据其公差带的分布有如图6所示的3种情况.穿透深度阈值是指零件在相互穿透深度达到该阈值后发生碰撞,接近距离阈值是指零件间的距离大于该阈值时不碰撞,小于该阈值就有可能发生碰撞.在这3种情况下,穿透深度阈值和接近距离阈值的计算如表1所示.图6 尺寸公差分类表1 尺寸公差的最大穿透深度和最小接近距离公差分类穿透深度阈值d p接近距离阈值d n图6a δ12δ11图6b δ22-δ21图6c-δ32δ31对于没有公差信息的几何面,其穿透深度阈值和接近距离阈值根据经验和零件大小按零件中最短边的5%计算.2.4 碰撞判定基于第1节碰撞定义,虚拟装配中结合公差信息的精确碰撞检测的判定流程如下:Step1.CAD 模型通过离散化得到多边形模型,使用多边形模型构造碰撞检测模型.Step2.获得外部设备输入,计算所操作对象的目标空间位姿信息.Step3.对所操作对象进行接近检测,获得接近距离δn 、与其距离最小的对象以及相应的几何元素对.Step4.获得几何元素对的接近距离阈值d 1n ,d 2n 和穿透深度阈值d 1p ,d 2p .08计算机辅助设计与图形学学报 第22卷Step5.如果δn >d 1n +d 2n ,那么不会发生碰撞,转Step8;如果δn +d 1p +d 2p <0,那么发生碰撞,转Step8;如果δn <d 1n +d 2n ,那么可能发生碰撞,执行下一步.Step6.对所操作零件进行碰撞检测,获得的穿透深度δp 、与其碰撞的零件以及发生碰撞的几何元素对.Step7.如果δp >min (d 1p ,d 2p ),那么发生碰撞;否则执行下一步.Step8.如果没有碰撞,那么更新零件的空间位姿信息;如果发生碰撞,提示发生碰撞.3 实验数据与对比我们依据本文提出的碰撞检测算法开发了虚拟装配仿真软件系统,并使用该系统对4种产品进行了装配过程仿真,如图7所示,装配仿真在图形工作站xw8000上进行.这4种产品的模型复杂度如表2所示.图7 产品装配过程仿真表2 测试模型的复杂度个产品零件数多边形数零件的面数零件的面片数最多最少平均最多最少平均跑步机2431440 56822 5699561309减速箱52246242526656207761844735车轮 84239964380644220402162856发动机11650238418321491120566765330 本文研究中,产品的CAD 模型通过接口转换成ACIS 模型,虚拟装配仿真系统读入ACIS 模型并生成碰撞检测模型,之后装配仿真人员在该系统中人机交互式地进行产品的装配过程仿真.对装配仿真中碰撞检测所用的时间和结果进行了统计分析,平均碰撞检测时间为产品装配过程中进行一次碰撞检测所消耗的时间,碰撞次数为产品装配仿真过程中所进行的碰撞检测的次数,多边形碰撞次数为零件的多边形模型发生碰撞的次数,几何层碰撞次数为基于本文算法检测到的零件发生碰撞的次数,108第5期侯伟伟,等:虚拟装配中基于精确模型的碰撞检测算法统计数据如表3所示.表3 碰撞检测时间及次数统计结果产品平均碰撞检测时间Πms碰撞检测Π次多边形碰撞Π次精确碰撞Π次跑步机 3.26639534592869减速箱8.221725952853685车轮 9.041140563484677发动机12.444918187867621 在人机交互式装配仿真过程中,装配仿真人员通过外设改变零件的位姿状态以实现零件的装配,对于零件的每一次位姿变换都需要进行碰撞检测,以判定零件在装配过程中是否与其他零件发生碰撞.由表3可知,零件的精确碰撞次数小于多边形碰撞次数.多边形碰撞检测模型对零件的近似表达会引起其碰撞检测结果的不准确性,采用本文算法能够有效地解决多边形碰撞检测引起的不准确性,提高虚拟装配系统碰撞检测的准确性.4 结论与展望碰撞检测是虚拟装配的重要基础之一,碰撞检测的准确性是虚拟装配系统数据真实性的重要保证.如何通过对三维数字模型的分析来真实地反映实际产品始终是计算机仿真面临的一个难题,本文通过几何级的精确碰撞检测在一定程度上保证了虚拟装配系统的数据准确性;但在碰撞检测过程中将零件作为刚性体处理,没有考虑装配过程零件的变形,而在实际装配中由于零件间碰撞而引起的变形也是影响产品装配的重要因素,因此我们在后续的研究中将考虑碰撞引起的变形.参考文献(R eferences):[1]Zhang L J,Huang X,K im Y J,et al.D2Plan:efficientcollision2free pat h computation for part removal and disassembly[J].Computer2Aided Design and Applications, 2008,5(1Π4):1212[2]Figueiredo M,Feenando T.An efficient parallel collisiondetection algorit hm for virtual prototype environment s[C]ΠΠProceedings of t he10t h International Conference on Parallel and Distributed Systems,Newport Beach,2004:2492256 [3]G ovindaraju N K,Redon S,Lin M C,et al.CULL IDE:interactive collision detection between complex models in large environment s using graphics hardware[C]ΠΠComputerGraphics Proceedings,Annual Conference Series,ACM SIGGRAP H,San Diego,2003:25232[4]Liu Xiaoping,Weng Xiaoyi,Chen Hao,et al.An improvedalgorit hm for octree2based exact collision detection[J].Journal of Computer2Aided Design&Computer Graphics, 2005,17(12):263122635(in Chinese)(刘晓平,翁晓毅,陈 皓,等.运用改进的八叉树算法实现精确碰撞检测[J].计算机辅助设计与图形学学报,2005,17(12):263122635)[5]Wu Dianliang,Zhu Hongmin,Fan Xiumin.A parallelcollisions detection algorit hm for interactive assembling operation in virtual environment[J].Journal of Shanghai JiaoTong University,2008,42(10):164021645(in Chinese)(武殿梁,朱洪敏,范秀敏.面向复杂产品的交互虚拟装配操作的并行碰撞检测算法[J].上海交通大学学报,2008,42(10):164021645)[6]Zheng Y i,Ning Ruxin,Liu Jianhua,et al.Research on fastcollision detection met hod in virtual assembly environment[J].Journal of System Simulation,2005,17(9):216722170(in Chinese)(郑 轶,宁汝新,刘检华,等.虚拟装配环境下快速碰撞检测方法的研究[J].系统仿真学报,2005,17(9):216722170)208计算机辅助设计与图形学学报 第22卷。
简述碰撞检测的原理及应用1. 碰撞检测的概念和定义•碰撞检测是计算机图形学和物理模拟领域中的一个重要技术。
•它用于判断两个或多个物体是否发生碰撞,以及计算碰撞的位置、法向量、碰撞反应等信息。
•在计算机游戏、虚拟现实、物理仿真、机器人等领域都有广泛的应用。
2.碰撞检测的原理•碰撞检测的原理可以分为离散和连续两种方法。
2.1 离散碰撞检测•离散碰撞检测是通过检查物体的离散位置来判断是否发生碰撞。
•其中最简单的方法是包围盒碰撞检测,即将物体用最小立方体包围起来,通过检测这些包围盒的位置关系来判断是否碰撞。
•还有其他的离散碰撞检测算法,如分离轴定理、包围球碰撞检测等。
2.2 连续碰撞检测•连续碰撞检测是通过检查物体在连续时间间隔内的运动轨迹来判断是否发生碰撞。
•常用的连续碰撞检测算法有扫描线法、时间步进法、线性插值法等。
3.碰撞检测的应用•碰撞检测在游戏开发中起着至关重要的作用。
•在游戏中,碰撞检测可以用于角色与障碍物的碰撞、子弹与敌人的碰撞、玩家与玩家之间的碰撞等等。
•此外,在虚拟现实和物理仿真领域中,碰撞检测也被广泛应用,例如模拟物理碰撞、机器人路径规划等。
4. 碰撞检测的优化方法•碰撞检测是一个计算复杂度相对较高的任务,为了提高碰撞检测的效率,可以采用一些优化方法。
•一种常用的优化方法是空间分割结构,如包围盒层次、八叉树、四叉树等,用于减少碰撞检测的计算量。
•另外还可以采用粗略检测和细致检测相结合的方法,即首先进行快速的粗略检测,再对可能发生碰撞的物体进行细致的检测。
5. 碰撞检测的发展趋势•随着计算机硬件的不断发展和计算能力的增强,碰撞检测的技术也在不断进步。
•目前很多游戏引擎已经集成了强大的碰撞检测功能,如Unity3D、Unreal Engine等。
•同时,机器学习和深度学习等人工智能技术的发展也为碰撞检测提供了新的思路和方法。
结论•碰撞检测作为计算机图形学和物理模拟领域中的重要技术,具有广泛的应用前景。
如何在三维度模型中实现精确的碰撞检测?一、使用优化的算法提高碰撞检测效率在三维模型中实现精确的碰撞检测,首先需要考虑的是如何提高算法的效率。
采用优化的算法可以大大减少运算时间,提高碰撞检测的速度和准确性。
1. 采用包围盒碰撞检测算法包围盒碰撞检测算法是一种常用的优化方法,它通过将三维模型包裹在一个简单的几何体中,如立方体或球体,来进行碰撞检测。
这样可以减少碰撞检测所需的计算量,提高检测效率。
2. 利用空间划分算法加速碰撞检测空间划分算法是另一种常用的优化方法,它将三维空间划分为多个较小的子空间,然后只对与当前模型有可能碰撞的子空间进行检测。
这样可以减少碰撞检测的范围,提高检测效率。
二、使用精确的碰撞检测算法提高检测准确性除了提高检测效率,实现精确的碰撞检测还需要考虑算法的准确性。
以下是一些精确的碰撞检测算法,可以用来增加模型的真实感和细节。
1. 边界球碰撞检测算法边界球碰撞检测算法是一种高精度的算法,它通过将三维模型包裹在一个球体中,判断两个球体是否相交来进行碰撞检测。
这种算法可以更准确地检测到不规则形状的碰撞。
2. 分离轴定理碰撞检测算法分离轴定理碰撞检测算法是一种基于几何投影的算法,它通过计算模型在不同轴上的投影区间是否重叠来进行碰撞检测。
这种算法可以处理复杂的几何体,并且具有较高的准确性。
三、综合运用不同的算法提高碰撞检测效果为了实现更精确的碰撞检测,我们可以综合运用不同的算法,结合包围盒、空间划分、边界球以及分离轴定理等优化算法来提高检测的效率和准确性。
1. 组合包围盒和分离轴定理算法对于形状比较复杂的模型,可以先使用包围盒算法进行初步的碰撞检测,排除掉绝大多数不会发生碰撞的情况。
然后再对可能发生碰撞的模型,采用分离轴定理算法进行进一步的检测,提高检测的准确性。
2. 组合空间划分和边界球算法对于具有大量模型的场景,可以先利用空间划分算法将场景划分为多个子空间,然后对每个子空间内的模型采用边界球算法进行快速碰撞检测。
大规模虚拟环境下复杂物体的碰撞检测的开题报告一、研究背景随着虚拟现实技术的发展,大规模虚拟环境的应用越来越广泛。
在虚拟环境中,复杂物体的碰撞检测是一个重要的问题。
例如,在虚拟游戏中,玩家角色与周围物体的碰撞检测决定了游戏的流畅度和真实度。
在虚拟现实培训和模拟中,复杂物体的碰撞检测是确保训练和模拟的准确性和安全性的关键因素。
二、研究内容本研究旨在在大规模虚拟环境下实现复杂物体的碰撞检测。
具体来说,研究内容包括以下几个方面:1.制定有效的碰撞检测算法:在大规模虚拟环境下,考虑到要检测的物体数量庞大且复杂,需要设计高效的碰撞检测算法,确保在虚拟环境中物体的移动和碰撞过程得以顺利进行。
2.优化碰撞检测的性能:在虚拟环境中,物体的移动和碰撞检测是实时进行的,需要保证检测速度和准确性。
本研究将探索一些优化方法,如使用GPU进行并行计算,以提高碰撞检测的性能。
3.针对不同的虚拟环境场景设计不同的碰撞检测方案:不同的场景需要不同的碰撞检测方案。
本研究将研究如何根据不同的场景进行灵活的碰撞检测方案的设计。
三、研究意义本研究旨在解决大规模虚拟环境下复杂物体碰撞检测的问题,具有重要的理论和应用价值。
其可以应用于虚拟游戏、虚拟现实培训和模拟等领域,提高虚拟环境中物体移动和碰撞检测的效率和准确性,进一步提高虚拟环境的真实度和使用价值。
四、研究方法本研究将采用以下方法:1.设计碰撞检测算法:分析常见的碰撞检测算法,针对大规模虚拟环境下需求,设计高效的碰撞检测算法。
2.实验验证:根据不同的虚拟场景,利用所设计的算法进行碰撞检测实验。
实验主要通过模拟虚拟物体的运动和碰撞等行为,验证所设计的碰撞检测算法的效果。
3.性能优化:对设计的算法进行性能分析,提出针对公共硬件环境(如GPU、CPU等)的优化策略,通过提高计算效率和计算准确率来优化算法的性能。
五、论文结构本研究将分为以下几个章节:第一章绪论:介绍本研究背景、研究内容、研究意义以及论文结构。
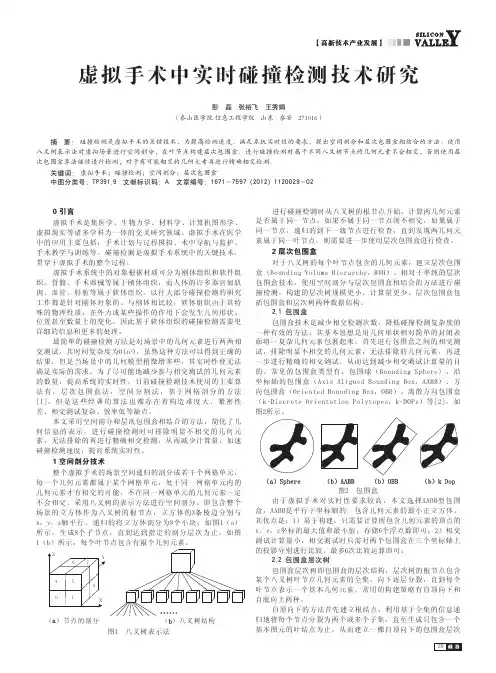
虚拟手术中实时碰撞检测技术研究彭 磊 张裕飞 王秀娟(泰山医学院 信息工程学院 山东 泰安 271016)摘 要: 碰撞检测是虚拟手术的关键技术,为提高检测速度,满足系统实时性的要求,提出空间剖分和层次包围盒相结合的方法。
使用八叉树表示法对虚拟场景进行空间剖分,在叶节点构建层次包围盒。
进行碰撞检测时属于不同八叉树节点的几何元素不会相交,否则使用层次包围盒算法继续进行检测,对于有可能相交的几何元素再进行精确相交检测。
关键词: 虚拟手术;碰撞检测;空间剖分;层次包围盒中图分类号:TP391.9 文献标识码:A 文章编号:1671-7597(2012)1120029-02进行碰撞检测时从八叉树的根节点开始,计算两几何元素0 引言是否属于同一节点,如果不属于同一节点则不相交,如果属于虚拟手术是集医学、生物力学、材料学、计算机图形学、同一节点,递归的到下一级节点进行检查,直到发现两几何元虚拟现实等诸多学科为一体的交叉研究领域。
虚拟手术在医学素属于同一叶节点,则需要进一步使用层次包围盒进行检查。
中的应用主要包括:手术计划与过程模拟、术中导航与监护、 2 层次包围盒手术教学与训练等。
碰撞检测是虚拟手术系统中的关键技术,贯穿于虚拟手术的整个过程。
对于八叉树的每个叶节点包含的几何元素,建立层次包围虚拟手术系统中的对象根据材质可分为刚体组织和软件组盒(Bounding Volume Hierarchy ,BVH )。
相对于单纯的层次织。
骨骼、手术器械等属于刚体组织,而人体的许多器官如肌包围盒技术,使用空间剖分与层次包围盒相结合的方法进行碰肉、血管、肝脏等属于软体组织。
以往大部分碰撞检测的研究撞检测,构建的层次树规模更小,计算量更少。
层次包围工作都是针对刚体对象的。
与刚体相比较,软体组织由于其特殊的物理性质,在外力或某些操作的作用下会发生几何形状、位置甚至数量上的变化,因此基于软体组织的碰撞检测需要更详细的信息和更多的处理。
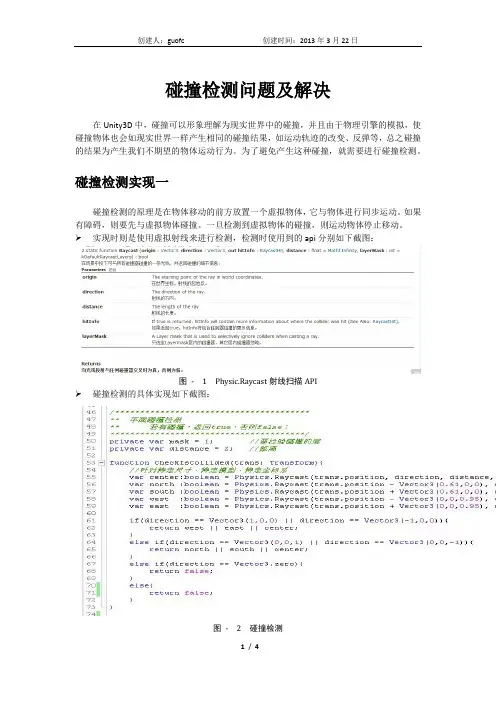
碰撞检测问题及解决在Unity3D中,碰撞可以形象理解为现实世界中的碰撞,并且由于物理引擎的模拟,使碰撞物体也会如现实世界一样产生相同的碰撞结果,如运动轨迹的改变、反弹等,总之碰撞的结果为产生我们不期望的物体运动行为。
为了避免产生这种碰撞,就需要进行碰撞检测。
碰撞检测实现一碰撞检测的原理是在物体移动的前方放置一个虚拟物体,它与物体进行同步运动。
如果有障碍,则要先与虚拟物体碰撞。
一旦检测到虚拟物体的碰撞,则运动物体停止移动。
实现时则是使用虚拟射线来进行检测,检测时使用到的api分别如下截图:图- 1 Physic.Raycast射线扫描API碰撞检测的具体实现如下截图:图- 2碰撞检测碰撞检测的调用实现如下截图:图- 3调用碰撞的实现实现一的问题及分析以上实现经过分析,原理想法上没问题,就是每隔一个固定频率后进行射线碰撞检测。
但是效果上却总是会在一些偶然的情况下发生碰撞,具体情形如下截图:图- 4碰撞导致不期望的运动Update受制于FPS问题经过分析,发现update虽然是每帧执行的,但是Unity3D的FPS——每秒的帧数,是变化的,它的值取决于渲染场景的面数;渲染速度又受机器的性能特别是CPU、内存、显卡不同而表现很大的差异。
如果场景中渲染的面数太多,并且机器配置不够好,可能导致FPS 很低,从而使渲染的两帧之间时间间隔很大,而在这个间隔内,碰撞已经发生,从而出现了上面的碰撞现象。
对于物理运动中需要进行固定频率的动作,Unity3D提供了FixedUpdate方法,这个频率是系统参数,可以更改。
因此,我们使用FixedUpdate来替换Update可解决此问题。
射线检测问题如图- 2碰撞检测实现中,虽然多加了几条射线,但毕竟只是物体中的个别点。
在我们的场景中,物体都是规则的且正常运动规律显著,所以只需要把几个特征点找到然后分别进行射线检测即可。
但是这个毕竟是存在缺陷的,如果能够对物体整个面进行检测,那就完美了。
3d碰撞检测公式解释说明以及概述1. 引言1.1 概述在计算机图形学和虚拟现实领域中,碰撞检测是一个关键的概念。
它用于判断模型、物体或粒子之间是否发生了碰撞,并在碰撞发生时进行相应的处理。
而3D 碰撞检测则是在三维空间中进行碰撞检测的一种技术。
1.2 文章结构本文将以以下方式组织内容:首先介绍3D碰撞检测的定义和应用领域。
接着,我们将详细解释常用的3D碰撞检测算法和公式,包括其基本原理和数学基础。
最后,我们将通过实际案例和应用示例来分析这些算法和公式在实践中的应用效果。
1.3 目的本文旨在提供对于3D碰撞检测公式的全面解释说明并概述相关内容。
希望通过阐述其基本原理、常用算法以及具体应用案例,读者能够深入理解3D碰撞检测的工作原理及其在各个领域中的重要性。
同时,我们也致力于探讨未来可能的研究方向和发展趋势,以期推动该领域的发展和创新。
2. 3D碰撞检测公式解释说明:2.1 什么是3D碰撞检测:在计算机图形学和游戏开发中,3D碰撞检测是一种用于判断物体是否相交或触碰到其他物体的技术。
它可以应用在虚拟现实、模拟仿真、游戏物理引擎等领域。
2.2 碰撞检测的应用领域:3D碰撞检测广泛应用于各种领域,例如电子游戏中的角色碰撞、场景中物体的重叠、交通仿真中车辆的碰撞等。
它为模拟真实世界中的物体行为提供了必要的信息,并且对于增强用户体验和提升应用效果至关重要。
2.3 常用的3D碰撞检测算法和公式:在进行3D碰撞检测时,常用的方法包括包围盒检测、距离函数法、光线投射法等。
其中,包围盒检测是一种简单有效的方法,它利用一个立方体或长方体将物体包围起来,并通过比较边界框之间是否存在重叠来判断是否碰撞。
距离函数法则通过计算两个物体之间的最短距离,从而判断是否相交。
而光线投射法则利用射线与物体表面的交点来进行碰撞检测。
在碰撞检测中,常用的数学公式包括向量点乘、向量叉乘、矩阵变换等。
向量点乘可以用来计算两个向量之间的夹角和投影关系,从而判断两个物体之间的相对方位。
3DMAX中的碰撞检测与物理模拟3DMAX中的碰撞检测与物理模拟碰撞检测和物理模拟在3D制作中扮演着重要的角色。
无论是电影特效、游戏开发还是建筑设计,3DMAX作为一款强大的三维建模和渲染软件,其碰撞检测和物理模拟功能的运用能够让场景更加真实和生动。
本文将介绍3DMAX中的碰撞检测与物理模拟的原理和应用。
一、碰撞检测的原理与应用1. 碰撞检测的原理碰撞检测是指在3D场景中判断两个或多个物体是否发生了碰撞的过程。
在3DMAX中,碰撞检测主要是通过计算物体的边界盒或者多边形网格之间是否存在相交来进行。
边界盒是一个简单的几何体,可以用一个包围物体的盒子来近似表示该物体的大小和形状。
多边形网格则是由多个三角形构成的网格模型。
2. 碰撞检测的应用在游戏开发中,碰撞检测是非常重要的一项技术。
它可以实现角色与环境的交互,角色与其他角色的碰撞等。
通过合理地运用碰撞检测技术,可以实现游戏中丰富多样的交互效果,提升游戏的可玩性和真实感。
在建筑设计中,碰撞检测则可以确保建筑物的结构稳定性和安全性。
通过在3DMAX中设置碰撞检测,可以帮助设计师发现并解决建筑结构中的潜在问题,从而提高建筑的质量和可靠性。
二、物理模拟的原理与应用1. 物理模拟的原理物理模拟是指通过模拟真实世界中的物理规律来模拟物体的运动和互动。
在3DMAX中,物理模拟主要涉及到重力、摩擦力、碰撞反应等物理规律的模拟和运用。
通过在3D场景中设置物体的质量、摩擦系数等属性,可以实现物体的真实运动效果。
2. 物理模拟的应用在电影特效中,物理模拟可以模拟真实的自然现象,如水的流动、火的燃烧等。
通过合理地运用物理模拟技术,可以让特效场景更加逼真,增强视觉冲击力。
在游戏开发中,物理模拟可以模拟角色的动作和运动。
通过设置角色的质量、摩擦系数等属性,可以实现角色在游戏中与环境进行互动的效果。
例如,角色在施加力的情况下会受到相应的物理反馈,使得其动作更加真实和自然。
三、3DMAX中的碰撞检测与物理模拟的操作方法1. 碰撞检测的操作方法在3DMAX中,可以通过编辑模式下的“碰撞”选项来进行碰撞检测的设置。
碰撞检测算法研究摘要:实时碰撞检测是机器人、动画仿真、虚拟现实等领域中一个非常关键的问题,其基本任务是确定两个或多个物体彼此之间是否发生接触或穿透。
尤其是随着3D游戏日渐盛行,物体之间的干涉和碰撞检测得到广泛的研究,碰撞检测技术所面临的问题也日益突出,具有很重要的意义。
主要对一些碰撞检测算法作出全面了解、透彻分析。
关键词:碰撞检测;层次包围体;空间剖析1 碰撞检测技术概述碰撞检测(Collision Detection,CD)也称为干涉检测或者接触检测,是基于现实生活中一个普遍存在的事实:两个不可穿透的对象不能共享相同的空间区域。
碰撞检测作为虚拟现实系统中的一个关键组成部分,主要的任务是判断物体模型之间、模型与场景之间是否发生了碰撞,以及给出碰撞位置、穿刺深度等信息。
碰撞检测算法一般可以分为两步:一是初步检测阶段:也就是将大多数明显的不相交的物体进行快速的排除;另一个是详细检测阶段(也可以称为精确检测阶段)。
一些算法将详细检测阶段详细的划分为两个阶段:①逐步求精,在初步检测的基础上进一步继续将检测的范围缩小;②精确求交,在“逐步求精”的基础上,对所建的模型进行相交测试,详细的测试出潜在的相交区域。
二是由于现实工程中的需要,碰撞检测算法得到了很好的发展和创新,因此产生了很多碰撞检测算法如图1所示。
碰撞检测算法大体上可以分为基于物体空间的碰撞检测算法和基于图像空间的碰撞检测算法。
在基于物体空间的碰撞检测算法中又分为采用一般表示模型的碰撞检测算法和采用空间结构碰撞检测算法。
采用采用空间结构碰撞检测算法包括空间剖析法和层次包围体法。
这里将主要介绍空间结构碰撞检测算法。
层次包围盒法:直接对两个物体对象的几何体执行碰撞测试,其计算过程代价过于高昂,尤其是当物体包含许多个多边形的时候。
为了减少计算消耗,在几何相交测试之前,通常先执行物体的包围体测试。
层次包围盒方法的基本思想是用一个简单的包围盒将复杂不规则的几何对象围住,当两个对象作碰撞检测时,如果对象的包围盒不相交,则对象肯定不相交。
虚拟空间中柔性体碰撞检测技术研究的开题报告一、选题的背景和意义随着虚拟现实技术的不断发展与普及,越来越多的人们开始进入到虚拟空间中进行交互式的体验与互动,其中柔性体碰撞检测技术则是虚拟空间中一个重要的研究方向。
由于柔性物体具有柔软、形变性强、多变性等特点,在虚拟现实中的应用也越来越广泛,比如仿真手术、虚拟现实游戏、机器人控制等领域,如何实现准确的柔性体碰撞检测成为了研究的热点。
因此,开展柔性体碰撞检测技术的研究,具有重要的理论意义和应用价值。
随着研究的深入,它将推动虚拟现实技术的进一步发展与应用,对提升人们虚拟空间中的沉浸感、娱乐体验、教育培训等领域都将产生极大的推动作用。
二、国内外研究现状目前,国内外在柔性体碰撞检测技术的研究中取得了很多成果。
国外主要的研究集中在有限元方法、有限差分方法、网格自适应等方向,其应用领域涵盖了仿真手术、模型动画、游戏开发等诸多方面,但目前提出的几种方法在精度、效率、稳定性等方面还存在缺陷。
国内的研究则主要集中于基于物理模型的有限元方法、面元法、基于质心的动力学模拟、高阶网格自由度方法等方向,其应用领域涵盖了仿真手术、游戏开发、动画特效等诸多领域,在柔性体碰撞检测研究领域积累了一定的实践经验。
三、研究内容本课题的研究内容主要包括如下两个方面:1.柔性体碰撞检测算法的设计和优化:针对目前现有算法中存在的精度、效率、稳定性等问题,通过数学模型的建立和算法的设计优化,提出一种能够准确、高效地实现柔性体碰撞检测的新算法;2.柔性体碰撞检测技术的应用研究:通过构建合适的场景,测试新算法的性能,并应用于如虚拟手术、游戏开发、动画特效等领域,验证其实用性和应用价值。
四、研究方法和技术路线本课题的研究方法主要包括:1.算法设计与数学模型建立:通过分析柔性体的物理特性和碰撞检测的关键点,提出一种新的柔性体碰撞检测算法,并建立数学模型对算法进行描述和分析;2.算法实现与优化:使用适当的编程语言对算法进行实现,并通过算法的优化和改进提高其运行效率和精度;3.应用评估和性能测试:构建合适的场景,利用开源工具或自主编写工具进行测试和性能评估,评估算法的精度、稳定性、效率等性能指标;4.实际应用研究:将研究成果应用于如虚拟手术、游戏开发、动画特效等领域,并进一步验证其实用性和应用价值。
碰撞检测碰撞检测是计算机图形学领域中一个非常重要的概念,它用于判断两个或多个物体是否发生了碰撞。
在游戏开发、物理模拟、虚拟现实等领域中都广泛应用了碰撞检测技术。
本文将对碰撞检测的基本原理、常用算法和应用进行介绍。
一、碰撞检测的基本原理在计算机图形学中,通常将物体抽象为多边形、球体、立方体等几何形状。
当两个物体发生碰撞时,它们的边界或表面上的点会彼此重叠。
因此,判断两个物体是否发生碰撞,关键是要检测它们的边界或表面是否相交。
碰撞检测的基本原理可以归结为以下几步:1. 碰撞检测前的准备:获取待检测物体的位置、姿态和形状信息。
通常使用坐标系、矩阵和向量等数学工具来描述和计算物体的位置和形状。
2. 碰撞检测的粗略判断:通过一个快速的算法,如包围盒(bounding box)或包围球(bounding sphere)来判断物体是否有可能产生碰撞。
这一步旨在减少后续的详细检测计算量,提高碰撞检测的效率。
3. 碰撞检测的详细计算:当粗略判断有碰撞可能时,进行更加精确的碰撞检测计算。
常见的算法有:分离轴定理(Separating Axis Theorem)、基于向量的碰撞检测(Vector-based Collision Detection)等。
4. 碰撞的反应和处理:当发生碰撞时,需要根据物体的属性和场景需求来处理碰撞的反应,如物体的反弹、碎裂、能量转移等。
二、常用的碰撞检测算法1. 包围盒(Bounding Box)算法:这是最简单、最常用的碰撞检测算法之一。
它将物体看作是一个矩形,最简单情况下只需要比较物体的位置和尺寸,判断是否相交。
虽然精度较低,但计算速度快,通常用于快速排除不可能发生碰撞的情况。
2. 分离轴定理(Separating Axis Theorem,SAT):该算法是一种比较常用的精确碰撞检测算法,适用于复杂形状的物体。
它基于一个简单的原理:如果两个非凸物体没有共享的分离轴,那么它们一定相交。
二维碰撞检测算法碰撞检测(Collision Detection,CD)也称为干涉检测或者接触检测,用来检测不同对象之间是否发生了碰撞,它是计算机动画、系统仿真、计算机图形学、计算几何、机器人学、CAD\ CAM等研究领域的经典问题。
碰撞物体可以分为两类:面模型和体模型。
面模型是采用边界来表示物体,而体模型则是使用体元表示物体。
面模型又可根据碰撞后物体是否发生形变分为刚体和软体,刚体本身又可根据生成方式的不同分为曲面模型和非曲面模型。
目前对于碰撞的研究多集中于面模型的研究,因为体模型是一种三维描述方式,对它进行碰撞检测代价较高。
而在面模型的研究中,对刚体的研究技术更为成熟。
下面列举几种常用的碰撞检测技术:1:包围盒(bounding box)是由Clark提出的,基本思想是使用简单的几何形体包围虚拟场景中复杂的几何物体,当对两个物体进行碰撞检测时,首先检查两个物体最外层的包围盒是否相交,若不相交,则说明两个物体没有发生碰撞,否则再对两个物体进行检测。
基于这个原理,包围盒适合对远距离物体的碰撞检测,若距离很近,其物体之间的包围盒很容易相交,会产生大量的二次检测,这样就增大了计算量。
包围盒的类型主要有AABB(Aligned Axis Bounding Box)沿坐标轴的包围盒、包围球、OBB(Oriented Bounding Box)方向包围盒和k-DOP(k Discrete Orientation Polytopes)离散方向多面体等。
AABB是包含几何对象且各边平行于坐标轴的最小六面体,两个AABB包围盒相交当且仅当它们三个坐标轴上的投影均重叠,只要存在一个方向上的投影不重叠,那么它们就不相交。
AABB间的相交测试和包围体的更新速度比其他算法效率高,因此使用最广泛,尤其适用于多物体运动的大规模环境和变形体碰撞检测。
OBB包围盒的相交测试基于分离轴的理论的,它的构造关键在于包围盒最佳方向的确定,最佳方向必须保证在该方向上包围盒的尺寸最小。
虚拟拆装仿真平台碰撞检测功能的实现的开题报告一、选题背景虚拟拆装仿真平台是近年来逐渐兴起的一种技术,能够将实际的物体数字化,并利用计算机模拟物体的拆装、运动等现象,达到在不真实环境下进行实验或操作的效果。
因此,虚拟拆装仿真平台被广泛应用于多个领域,如机械设计、机器人控制、航空航天等。
碰撞检测功能是虚拟拆装仿真平台重要的组成部分之一,能够检测物体之间的碰撞,并防止物体穿透等问题的发生。
在实际应用中,碰撞检测功能对保证物体运动的稳定性和安全性具有重要作用。
因此,本论文选题就是探讨虚拟拆装仿真平台中碰撞检测功能的实现方法和技术。
二、研究内容本论文主要研究虚拟拆装仿真平台碰撞检测功能的实现方法和技术,包括以下内容:1. 基础理论研究介绍碰撞检测的概念、分类、应用场景以及相关算法和数学模型。
主要包括窄相交检测、基于体素栅格的碰撞检测算法和基于物理模型的碰撞检测算法等。
2. 技术实现根据虚拟拆装仿真平台的特点和需求,利用Unity3D引擎、Bullet Physics引擎和C#语言等技术,构建碰撞检测系统,并实现多种功能,如物体的碰撞检测、物体的运动、物体的管理等。
3. 系统集成将碰撞检测系统与虚拟拆装仿真平台集成,并进行测试和优化,以验证系统的可靠性、准确性和稳定性。
三、研究意义虚拟拆装仿真平台在工业、教育、科研等领域有着广泛的应用。
本论文研究虚拟拆装仿真平台中碰撞检测功能的实现方法和技术,对于提升虚拟拆装仿真平台的功能和质量,进一步丰富虚拟现实技术的应用场景具有积极作用。
此外,在机械制造、机器人等领域中,碰撞检测功能的稳定性和准确性对于保障安全和提升效率具有至关重要的作用,因此,此研究具有重要的理论和实践意义。
四、拟采用的研究方法本论文主要采用文献研究法、实验研究法和理论分析法等方法进行研究。
首先,梳理碰撞检测领域相关的文献和资料,并分析不同碰撞检测算法的优缺点和应用场景。
其次,借助Unity3D引擎和Bullet Physics引擎等工具,进行实验和模拟,根据实验结果反复优化碰撞检测系统,提高系统性能和精度。
Unity 中的碰撞检测方法碰撞检测技术是游戏和虚拟现实中最核心、最基本的技术。
碰撞检测技术在游戏和虚拟现实场景中非常重要,它保证了真实世界的正确虚拟化。
例如对于角色的控制欲规划,碰撞检测可以帮助角色避开场景中出现的障碍物。
为使用户在虚拟场景中能够感受到自己确实在场景中,就需要能够实时地检测角色与障碍物之间的碰撞检测,并及时作出响应。
然而在一个场景中,可能存在许多种不同类型的碰撞,这就要求有不同的碰撞检测方法来适应各种类型的碰撞。
目前,在虚拟现实技术中出现了很多种碰撞检测方法,其目的无非有3个:检测模型之间是否发生碰撞;预测即将发生的碰撞;动态获取模型之间的距离。
在Unity 中主要有3种碰撞检测方法与上面的3个模型对应,分别是基本碰撞检测、触发器碰撞检测和光线投射。
无论是PC 端还是移动应用端,碰撞检测技术始终是程序开发的难点,甚至可以用碰撞检测技术作为衡量引擎是否完善的标准。
好的碰撞检测技术要求对象在场景中可以平滑移动,同时还要满足精确性和稳定性,防止对象在特殊情况下发生违背常规的状况。
例如,人物无缘无故被卡住不能前进,或者人物穿越了障碍物。
目前,引擎Unity ,其功能非常强大,集成了强大的碰撞检测功能,其中一个显著特点就是跨平台游戏开发。
碰撞检测方法碰撞检测定义碰撞的发生无非是检测两个物体对象之间的物理接触,在Unity 中是使用碰撞器组件覆盖在物体表面,用来负责与其它物体之间的碰撞。
这种从其它碰撞器检测和取得碰撞信息的方法称为碰撞检测。
Unity 碰撞检测方法分类在Unity 中,可以检测两个物体之间的碰撞,也可以检测特定碰撞器之间的碰撞,甚至可以使用光线投射预先检测碰撞。
本文以一个角色与3D 物体的碰撞为例说明这3种碰撞方法的不同。
基本碰撞检测在Unity 中,要实现碰撞检测,就必须给每个对象添加相应的碰撞器。
默认情况下,Unity 会自动将碰撞器添加到创建的对象中,当然也可以自己添加碰撞器。
三维碰撞检测算法-回复什么是三维碰撞检测算法?三维碰撞检测算法是指在三维空间中,用于检测物体之间是否发生碰撞的算法。
它在计算机图形学、虚拟现实、游戏开发等领域都得到了广泛应用。
通过判断物体之间的位置和形状,可以有效避免物体的交叉和重叠,保证场景的真实性和合理性。
三维碰撞检测算法的步骤:1. 建立物体模型:首先,需要对参与碰撞检测的物体进行建模。
常用的建模方法包括多边形网格、几何体和边框层次等。
根据具体需求,可以选择不同的建模方式。
建模的准确性和密度直接影响到后续碰撞检测的精度和效率。
2. 细分场景:随后,将场景进行细分,以提高碰撞检测的效率。
可以将三维空间划分成网格、八叉树或其他数据结构,将物体分配到相应的空间单元中,减少需要进行碰撞检测的物体数量,从而提高算法的效率。
3. 粗略检测:在完成场景细分后,进行粗略的碰撞检测。
这一步骤主要是通过判断物体的包围盒或者其他的简化形状是否相交,来对可能发生碰撞的物体进行初步筛选。
这样可以进一步减少需要进行详细检测的物体数量,提高算法的速度。
4. 详细检测:经过粗略检测后,对可能发生碰撞的物体进行详细检测。
在这一步骤中,需要考虑物体之间的碰撞形状、旋转、位移等因素。
常见的检测算法包括分离轴定理(Separating Axis Theorem)、网格检测(Mesh Intersection)、球体检测(Sphere Intersection)等。
根据实际情况,可以选择合适的算法来进行碰撞检测。
5. 处理碰撞:当检测到碰撞时,需要进行相应的处理。
处理碰撞的方式包括物体的反弹、推动、分离或者其他的物理效应。
此外,还需要考虑碰撞之后的惯性、能量损耗和接触点的更新等问题,以保证物体的运动和反应能够符合真实世界的物理规律。
6. 优化和性能提升:在完成碰撞检测算法后,可以通过优化算法和数据结构,进一步提高检测的效率和性能。
常用的优化方法包括空间划分的优化、算法的并行化、基于GPU的加速等。