过程控制习题以及详解
- 格式:doc
- 大小:203.51 KB
- 文档页数:11
过程控制系统部分习题讲解6.1说明一下名词术语的含义:被动对象、被控变量、操纵变量、扰动(干扰)量、设定(给定)值、偏差。
答:被控对象——自动控制系统中,工艺参数需要控制的生产过程、设备或机器等。
被控变量——被控对象内要求保持设定数值的工艺参数。
操纵变量——受控制器操作的,用以克服干扰的影响,使被控变量保持设定值的物料或能量。
扰动量——除操作变量外,作用于被控对象并引起被控变量变化的因素。
设定值——被控变量的预定值。
偏差——被控变量的设定值与实际值之差。
6.3下列控制系统中,哪些是开环控制,哪些是闭环控制?A.定制控制B.随动控制C.前馈控制D.程序控制答:C——开环控制;A、B、D——闭环控制。
(程序控制的设定值也是变化的,但它是一个已知的时间函数,即设定值按一定的时间程序变化。
)6.6在石油化工生产过程中,常常利用液态丙烯汽化吸收裂解气体的热量,使裂解气体的温度下降到规定数值上。
图6-3是一个简化的丙烯冷却器温度控制系统。
被冷却的物料是乙烯裂解气,其温度要求控制在(15±1.5)℃。
如果温度太高,冷却后的气体会包含过多的水分,对生产造成有害影响;如果温度太低,乙烯裂解气会产生结晶析出,杜塞管道。
图6-3(1)指出系统中被控对象、被控变量和操作变量各是什么?(2)试画出该控制系统的组成方块图。
答:(1)被控对象为丙烯冷却器;被控变量为乙烯裂解气的出口温度;操作变量为气态丙烯的流量。
(3)该系统的方块图如图6-4所示。
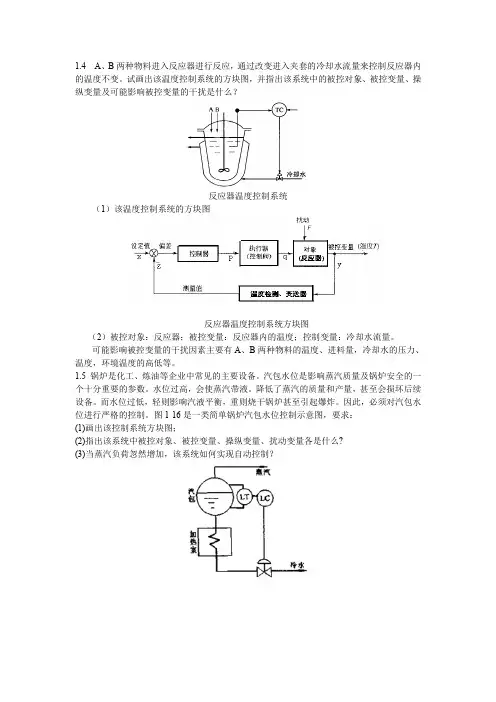
图6-46.7图6-5所示是以反应温度控制系统示意图。
A、B两种物料进入反映,通过改变进入夹套的冷却水流量来控制反应器内的温度保持不变。
图中TT表示温度变送器,TC便是温度控制器。
试画出该温度控制系统的方块图,并指出该控制系统中的被控对象、被控变量、操作变量及可能影响被控变量变化的扰动各是什么?图6-5答:反应器温度控制系统中被控对象为反应器;被控变量为反应器内温度;操作变量为冷却水流量;干扰为A、B物料的流量、温度、浓度、冷却水的温度、压力及搅拌器的转速。
反应器的温度控制系统的方块图如图6-6所示。
图6-66.8乙炔发生器是利用电石和水来产生乙炔气装置。
为了降低电石消耗量,提高乙炔的收率,确保生产安全,设计了如图6-7所示温度控制系统。
工艺要求发生器温度控制在(80±1)℃。
试画出该温度控制系统的方块图,并指出图中的被控对被控变量、操作变量及可能存在的扰动。
图6-7答:乙炔发生器温度控制系统方块图如图6-8所示(图中T、T O分别为乙炔发生器温度及其设定值)。
图6-8被控对象:乙炔发生器;被控变量:乙炔发生器内温度;操纵变量:冷水流量;扰动量:冷水温度、压力;电石进料量、成分等。
6.9图6-9所示为一列管式换热器。
工艺要求出口物料温度保持恒定。
经分析如果保持物料入口流量和蒸汽流量基本恒定,则温度的波动将会减小到工艺允许的误差范围之内。
现分别设计了物料入口流量和蒸汽流量两个控制系统,以保持出口物料温度恒定。
图6-9(1)试画出对出口物料温度的控制系统方块图;(2)指出该系统是开环控制系统还是闭环控制系统,并说明理由。
答:(1)控制系统方块图如图6-10所示。
图6-10(2)控制系统为开环控制系统。
从方块图可以看出,对物料入口流量和蒸汽流量均为闭环控制系统;而对于出口物料温度,未经过测量变送环节反馈到系统输入端,没有形成闭环系统。
6.15 图6-14是一个典型的衰减振荡过程曲线,衰减振荡的品质指标有以下几个:最大偏差、衰减比、余差、过渡时间、振荡周期(或频率)。
请分别说明其含义。
图6-14答:(1)最大偏差――是指过渡过程中被控变量偏离设定值的最大数值。
图中A表示最大偏差。
最大偏差描述了被控变量偏离设定值的程度,最大偏差愈大,被控变量偏离设定值就越远,这对于工艺条件要求较高的生产过程是十分不利的。
(2)衰减比――是指过渡过程曲线上同方向第一个波的峰值与第二个波的峰值之比。
图中衰减比n=B:B’。
对于衰减振荡而言,n总是大于1的。
若n接近1,控制系统的过渡过程曲线接近于等幅振荡过程;若n小于1,则为发散振荡过程;n越大,系统越稳定,当n 趋于无穷大时,系统接近非振荡衰减过程。
根据实际操作经验,通常取n=4~10为宜。
(3)余差――是指过渡过程终了时,被控变量所达到的新的稳态值与设定值之间的差值。
图中C表示余差。
余差是一个重要的静态指标,它反映了控制的精确程度,一般希望它为0或在一预定的允许范围内。
(4)过渡时间――是指控制系统受到扰动作用后,被控变量从原稳定状态回复到新的平衡状态所经历的最短时间。
从理论上讲,对于具有一定衰减比的衰减振荡过程,要完全达到新的平衡状态需要无限长的时间。
所以在实际应用时,规定只要被控变量进入新的稳态值的±5%(或±2%)的范围内,且不再越出时为止所经历的时间。
过渡时间短,说明系统恢复稳定快,即使干扰频繁出现,系统也能适应;反之,过渡时间长,说明系统稳定慢,在几个同向扰动作用下,被控变量就会大大偏离设定值而不能满足工艺生产的要求。
一般希望过渡时间愈短愈好。
(5)振荡周期(或频率)――振荡周期是指过渡过程同向波峰(或波谷)之间的间隔时间,其倒数为振荡频率。
在衰减比相同的条件下,周期与过渡时间成正比。
一般希望振荡周期短些好。
6.26填空。
(1)根据实践经验的总结发现,除少数无自衡的对象以外,大多数对象均可用_____、_____、_____、_____这4种典型的动态特性来加以近似描述。
(2)为了进一步简化,也可以将所有的对象的动态特性都减化为_____的形式,用传递函数可以表示为_____。
(3)在对象传递函数表达式W(s) 中,K 表示对象的_____,T 表示对象的_____,表示对象的_____。
答:(1)一阶;二阶;一阶加纯滞后;二阶加纯滞后。
(2)一阶加纯滞后;W (s )=(3)静态放大系数;时间常数;纯滞后时间。
6.41 什么是简单控制系统?试画出简单控制系统的典型方块图。
答:所谓简单控制系统,通常是指由一个被控对象、一个检测元件及传感器(或变送器)、一个调节器和一个执行器所构成的单闭环控制系统,有时也称为单回路控制系统。
简单控制系统的典型方块图如图6-34所示。
图6-346.43 被控对象、调节阀、调节器的正、反作用方向各是怎样规定的?答:被控对象的正、反作用方向规定为:当操纵变量增加时,被控变量也增加的对象属于“正作用”;反之,被控变量随操纵变量的增加而降低的对象属于“反作用”。
调节阀的作用方向由它的气开、气关型式来确定。
气开阀为“正”方向,气关阀为“反”方向。
如果将调节阀的输入偏差信号定义为测量值减去给定值,那么当偏差增加时,其输出也增加的调节器称为“正作用”调节器;反之,调节器的输出信号随偏差的增加而减小的称为“反作用”调节器。
6.44 单参数控制系统中,调节器的正反作用应怎样选择?答:先做两条规定:(1)气开调节阀为+A ,气关调节阀为-A ;(2)调节阀开大,被调参数上升为+B ,下降为-B 。
则A ·B=“+”调节器选反作用;A ·B=“-”调节器选正作用。
e-s例如,图6-35中,阀为气开+A,阀开大,液位下降-B,则(+A)·(-B)=“-”调节器选正作用。
图6-356.45图6-36中,控制系统的调节器应该选用正作用方式,还是反作用方式?(a) (b)(c) (d) (e)图6-36答:(a)――正作用;(b) ――正作用;(c) ――反作用;(d) ――正作用;(e) ――反作用;6.46图6-37中的液面调节回路,工艺要求故障情况下送出的气体中也不许带有液体。
试选取调节阀气开、气关型式和调节器的正、反作用,再简单说明这一调节回路的工作过程。
答:因工艺要求故障情况下送出的气体不许带液,故当气源压力为零时,阀门应打开,所以调节阀是气关式。
当液位升高时,要求调节阀开度增大,由于所选取的是气关调节阀,故要求调节阀输出减少,调节器是反作用。
其工作过程如下:液体↑→液位变送器输出↑→调节器输出↓→调节阀开度↑→液体输出↑→液位↓。
图6-376.47图6-38所示为加热炉温度控制系统。
根据工艺要求,出现故障时炉子应当熄火。
试说明调节阀的气开、气关型式,调节器的正、反作用方式,并简述控制系统的动作过程。
图6-38答:故障情况下气源压力为零,应切断燃料,以确保炉子熄火。
故要求调节阀为气开式,气源中断时关闭。
当炉温增高时,要求燃料量减少,即减小调节阀开度。
由于是气开阀,所以要求调节器输出减小,应选用反作用调节器。
控制系统的动作过程为:进料↓→温度↑→调节器输出↓→调节阀开度↓→燃料量↓→炉温↓。
反之,由于各种原因引起炉温↓→调节器输出↑→调节阀开度↑→燃料量↑→炉温↑。
6.48请判定图6-39所示温度控制系统中,调节阀和调节器的作用型式。
图6-39(1)当物料为温度过低时易析出结晶颗粒的介质,调节介质为过热蒸汽时;(2)当物料为温度过高时易结焦或分解的介质,调节介质为过热蒸汽时;(3)当物料为温度过低时易析出结晶颗粒的介质,调节介质为待加热的软化水时;(4)当物料为温度过高时易结焦或分解的介质,调节介质为待加热的软化水时。
答:(1)气关调节阀,正作用调节器;(2)气开调节阀,反作用调节器;(3)气开调节阀,正作用调节器;(4)气关调节阀,反作用调节器。
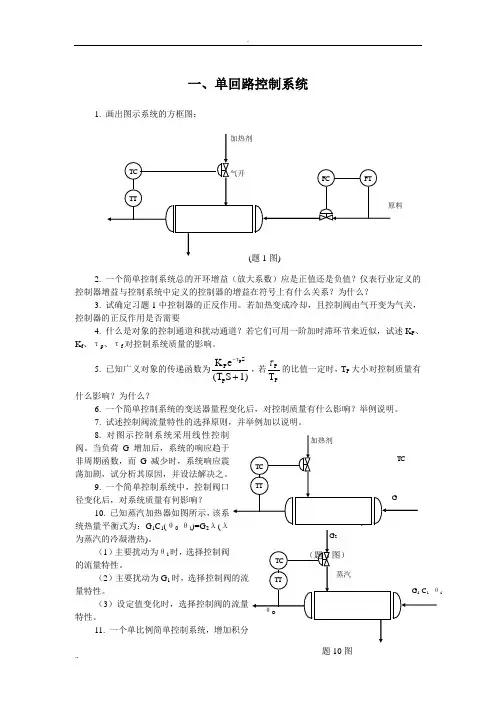
6.49图6-40为一蒸汽加热器,它的主要作用是对工艺介质加热,要求此介质出口温度恒定。
(1)选择被控变量和控制变量,组成调节回路,并画出方块图。
(2)决定调节阀的气开、气关型式和调节器的正反作用。
(3)当被加热的流体为热敏介质时,应选择怎样的调节方案为好?图6-40答:(1)方块图见图6-41。
图6-41(2)对于非热敏介质或易结晶介质,调节阀应选气关式,调节器的作用方向应是正作用。
(3)对于热敏介质,为防止局部过热而气化,调节参数不宜为蒸汽而选冷凝水为好。
即将调节阀装于冷凝水管线上。
6.50图6-42为一液体储槽,需要对液位加以自动控制。
为安全起见,储槽内液体严格禁止溢出,试在下述两种情况下,分别确定调节阀的气开、气关型式及调节器的正、反作用。
图6-42(1)选择流入量Qi为操纵变量;(2)选择流出量Qo为操纵变量。
答:(1)当选择流入量Qi为操纵变量时,调节阀安装在流入管线上,这时,为了防止液体溢出,在调节阀膜头上气源突然中断时,调节阀应处于关闭状态,所以应选用气开型式调节阀,为“+”作用方向。
这时,操纵变量即流入量Qi增加时,被控变量液位是上升的,故对象为“+”作用方向。
由于调节阀与对象都是“+”作用方向,为使整个系统具有负反馈作用,调节器应选择反作用方向;(2)当选择流出量Qo为操纵变量时,调节阀安装在流出管线上,这时,为了防止液体溢出,在调节阀膜头上气源突然中断时,调节阀应处于全开状态,所以应选用气关型式调节阀,为“-”作用方向。