手持式激光测距仪的设计
- 格式:doc
- 大小:759.50 KB
- 文档页数:54
用于相位法激光测距的电路系统设计激光测距是一种常用的非接触式测量技术,可以精确测量目标物体与测距仪的距离。
相位法激光测距是其中一种常见的方法,通过测量激光光波的相位差来计算距离。
下面将介绍一个基于相位法激光测距原理的电路系统设计。
1. 激光发射电路:设计一个激光二极管的驱动电路,可以通过电流控制二极管的发射光强。
使用一个恒流源以确保驱动电流的稳定性。
此外,还需要添加一个调节电路,可以根据需要调整激光发射的光功率。
2. 光电检测电路:将光电二极管作为光电检测元件接在测距仪上,用于接收激光反射光信号。
光电二极管产生的电流与光的强度成正比。
使用一个高增益的放大器将光电二极管产生的微弱电流信号放大。
3. 相位差测量电路:使用一个相位差测量电路来测量激光光波发射和接收之间的相位差。
该电路可以采用锁相放大器或频率调制技术。
在锁相放大器中,将激光发射的信号作为参考信号,将光电二极管接收到的信号作为待测信号输入。
锁相放大器可以精确测量相位差,并输出一个稳定的直流电压信号。
4. 距离计算电路:将锁相放大器输出的直流电压信号输入到距离计算电路中,根据相位差和激光波长的关系,计算出目标物体与测距仪之间的距离。
该电路可以通过编程芯片或者专门的测距芯片来实现距离计算。
以上是一个基于相位法激光测距原理的电路系统设计。
通过精心选择和设计各个电路模块,可以实现高精度和稳定的激光测距功能。
需要注意的是,在实际设计中还需考虑电路的抗干扰能力、功率稳定性和其他实际应用需要的因素。
在激光测距中,相位法是一种常用的方法,能够提供高精度和高稳定性的测距结果。
相位法激光测距的原理是通过测量激光发射和接收之间的光波相位差来计算目标物体与测距仪之间的距离。
在设计电路系统时,需要考虑到激光发射电路、光电检测电路、相位差测量电路和距离计算电路等各个环节。
首先,激光发射电路是相位法激光测距系统中的重要组成部分。
它负责驱动激光二极管发射具有稳定光强的激光光束。
使用激光测距仪进行建筑物高度测量的方法建筑物的高度是建筑工程中一个非常关键的参数,它对于建筑设计、结构计算以及施工进度都有着重要的影响。
传统的建筑高度测量方法通常需要使用测距仪、测角仪等大型设备,操作繁琐且耗时。
然而,随着科技的进步,激光测距仪作为一种高精度、高效率的测量工具广泛应用于建筑行业。
在本文中,我们将介绍使用激光测距仪进行建筑物高度测量的方法,以及相关技术的发展和应用。
一、激光测距仪原理与分类激光测距仪是一种利用激光束测量目标距离的仪器。
其工作原理是利用激光束在光学系统中传播的速度恒定不变,通过测量激光束从器件发射到目标和反射回器件所需的时间,从而计算出目标与测量仪之间的距离。
根据测量方式的不同,激光测距仪可以分为单次测距和连续测距两种类型。
单次测距激光测距仪需要在每次测量之前对目标进行调节,将激光束准确地瞄准目标,然后按下测量按钮进行测距。
该类型的激光测距仪适用于建筑物高度测量中的单次、独立测量需求,具有操作简单、测量迅速的特点。
连续测距激光测距仪可以实时连续测量目标的距离,并将结果显示在仪器上。
该类型的激光测距仪适用于需要连续测量建筑物高度或进行绘制等需要大量测量的任务,具有高效、精准的特点。
在建筑施工中,连续测距激光测距仪可以广泛应用于施工现场的高度测量、坡度测量、进度检查等任务。
二、使用激光测距仪进行建筑物高度测量的方法1. 测点连续法该方法适用于需要连续测量建筑物高度的场景,如建筑物外墙的高度测量。
首先,在建筑物的基准位置设置一台激光测距仪,并将其装置在稳定水平的三脚架上。
然后,使用测角仪或手机APP等工具测量基准位置与建筑物顶部的夹角。
接下来,将激光测距仪对准建筑物顶部,测量到激光仪上的高度差。
通过多次测量不同位置的高度差,并计算平均值,可以得到建筑物的高度。
2. 棱镜法该方法适用于距离较远、无法直接进行测量的建筑物高度测量。
首先,在需要测量的建筑物顶部附近设置一个显著的测点。
《相位法激光测距仪设计》摘要:I.引言A.激光测距仪的背景和重要性B.相位法激光测距仪的设计方法II.相位法激光测距仪的工作原理A.激光测距仪的基本原理B.相位法激光测距仪的测量原理III.相位法激光测距仪的设计A.系统硬件设计1.激光发射器2.激光接收器3.数字鉴相器B.系统软件设计1.数字信号处理2.相位差计算3.距离计算IV.相位法激光测距仪的性能分析A.测量精度B.测量范围C.抗干扰能力V.结论A.相位法激光测距仪的优势和应用B.未来发展方向和挑战正文:相位法激光测距仪是一种高精度、高效率的测距设备,广泛应用于军事、航空航天、地质勘测等领域。
本文将详细介绍相位法激光测距仪的设计方法。
首先,我们需要了解相位法激光测距仪的工作原理。
激光测距仪的基本原理是通过测量激光从发射到接收的时间来计算距离。
相位法激光测距仪在此基础上,利用激光相位差来测量距离。
通过系统硬件设计和软件设计,可以实现高精度、高效率的测距。
在系统硬件设计方面,相位法激光测距仪主要包括激光发射器、激光接收器和数字鉴相器。
激光发射器负责发射激光,激光接收器负责接收反射回来的激光,数字鉴相器则用于计算激光相位差。
在系统软件设计方面,相位法激光测距仪需要进行数字信号处理、相位差计算和距离计算。
数字信号处理用于处理接收到的激光信号,相位差计算用于计算激光发射器和接收器之间的相位差,距离计算则根据相位差计算出距离。
相位法激光测距仪具有较高的测量精度和测量范围,同时具有较强的抗干扰能力。
然而,随着应用场景的不断扩展,相位法激光测距仪也面临着一些挑战,例如如何提高测量精度、扩大测量范围等。
总之,相位法激光测距仪是一种具有重要应用价值的测距设备。
通过设计高质量的系统硬件和软件,可以实现高精度、高效率的测距。
激光器技术在便携式仪器中的应用研究激光器技术作为一项高科技技术,近年来在便携式仪器中的应用研究取得了长足的进展。
激光器技术的独特特性使得它成为制造高精度、高效率、小尺寸仪器的理想选择。
本文将介绍激光器技术在便携式仪器中的应用研究,并就其中的几个重要领域做简要的描述。
一、激光测距仪激光测距仪是一种利用激光器发射的激光束来测量距离的仪器。
它具有体积小、重量轻、测量精度高等特点,被广泛应用于建筑、工程测量等领域。
激光测距仪通过激光器发射激光束,经过物体反射后,通过接收器接收反射光,根据光的传播时间计算出距离。
激光测距仪在便携式仪器中的应用大大提高了测量的精确性和效率,为设计师们提供了更准确的测量数据,节约了时间和成本。
二、激光切割机激光切割机是一种利用激光束对材料进行切割的设备。
它具有高精度、高效率、无接触、无污染等特点,被广泛应用于金属加工、纺织、电子元器件等领域。
激光切割机采用高能量激光器发射激光束,通过对材料进行聚焦,使其形成高能量密度的光斑,从而将材料切割。
激光切割机在便携式仪器中的应用不仅提高了切割的精确性和速度,还减少了切割过程中对材料的损伤,为工业生产带来了巨大的便利。
三、激光雷达激光雷达是一种利用激光束进行测距和三维成像的设备。
它具有高分辨率、快速扫描、宽采样范围等特点,被广泛应用于地图绘制、障碍物检测等领域。
激光雷达通过激光器发射激光束,经过物体反射后,通过接收器接收反射光,并利用时差测量原理计算出距离。
激光雷达在便携式仪器中的应用使得它具备了高精度的测距和成像功能,为建筑测量、智能导航等领域提供了重要的技术支持。
四、激光投影仪激光投影仪是一种利用激光束进行图像投影的设备。
它具有高亮度、高对比度、色彩鲜艳等特点,被广泛应用于商业演示、教育培训等领域。
激光投影仪采用高功率激光器发射激光束,通过扫描控制系统将图像投射到特定位置。
激光投影仪在便携式仪器中的应用使得图像投影更加清晰、稳定,为商业演示和教育培训提供了更好的用户体验。
相位式激光测距仪激光接收部分设计激光测距仪是一种测量目标物体距离的工具,其原理是利用激光束在空气中传播的特性,通过测量激光束的往返时间来计算出目标物体与测距仪的距离。
激光接收部分是激光测距仪的核心组成部分之一,其设计的好坏直接影响到测量结果的准确性和稳定性。
在设计激光接收部分时,需要考虑以下几个关键因素:1.激光接收器的选择:激光接收器是接收激光信号的关键部件,其性能直接影响到激光测距仪的灵敏度和测距范围。
常见的激光接收器有光电二极管(PD)和光电效应晶体管(APD)。
PD具有较高的响应速度和较低的噪声,适用于近距离测距场景;APD具有较高的增益和较低的噪声,适用于远距离测距场景。
2.光学系统的设计:光学系统包括透镜、滤波器等光学元件,其作用是将入射的激光束聚焦到激光接收器上。
在设计光学系统时需要考虑激光束的聚焦效果、散斑噪声等因素,以提高测距仪的测量精度和信噪比。
3.信号放大和滤波电路的设计:激光接收器输出的信号很弱,需要经过放大和滤波才能得到可信的测距信号。
放大电路可以采用运算放大器等电路实现,滤波电路可以采用RC滤波器或数字滤波器等实现。
通过合理设计放大和滤波电路,可以提高信号的噪声抑制和动态范围。
4.时间测量电路的设计:激光测距仪是通过测量激光束的往返时间来计算距离的,因此需要设计一个高精度的时间测量电路。
常用的时间测量电路有计数器、时钟等,可以通过采样和比较测量激光脉冲信号的上升沿和下降沿来计算出往返时间。
在设计激光接收部分时,还需考虑以下一些技术细节:5.温度补偿:激光测距仪的测量精度受到温度的影响,尤其是光学元件和电子元件的温度变化。
因此,需要设计温度补偿电路,通过测量环境温度并补偿光学和电子元件的参考值,提高测量精度。
6.光路对齐:激光测距仪的激光发射和接收部分需要在一条直线上对准,才能确保测量结果的准确性。
因此,需要设计一个精密的光路对齐机构,确保激光束的传输方向稳定。
7.防干扰设计:激光测距仪易受到外界光源干扰,导致测量结果偏差。

20304050DISTO124PD-Z01zhDISTO™ pro4 / pro4 a-1.0.0zhzhDISTO™ pro4 / pro4 a-1.0.0zh125zh126DISTO™ pro4 / pro4 a-1.0.0zhzhDISTO™ pro4 / pro4 a-1.0.0zh127123zh4 756 10 9 8128PD-Z03DISTO™ pro4 / pro4 a-1.0.0zh1 210PD-Z02zh3 45 69 7 8DISTO™ pro4 / pro4 a-1.0.0zh1291234567zh89101112 1713 18141516PD-Z04130DISTO™ pro4 / pro4 a-1.0.0zhPD-Z051 2 3 4. A a D d G g J j M m P p T t W w+ B b E e H h K k N n Q q U u X xC c F f I i L l O o R r V v Y y, 2 2 3 3 4 4 5 5 6 6 S s 8 8 Z z? Ä ä É é Ì ì! À à È è Í í& Á á E ê Î î1  â Ë ë Ï ï à ã Å å Æ æ Ç ç1 2 367 84zh5 6Ö ö 7 7 Ü ü 9 9Ñ ñÒ òÓ óÔ ôÕ õØ ø57 8 9Ù ùÚ úÛ ûDISTO™ pro4 / pro4 a-1.0.0zh131zh132DISTO™ pro4 / pro4 a-1.0.0zhPD-Z07zhDISTO™ pro4 / pro4 a-1.0.0zh133PD-Z06PD-Z08PD-Z10English1 Deutsch 2 English 3 FrançaiszhPD-Z093.504m134DISTO™ pro4 / pro4 a-1.0.0zhMenu2 end cover 3 basic settings 4 basic functions 5 calculation 6 memory 7 calculatorMenu1 measure settings 2 end cover 3 basic settings 4 basic functions 5 calculation 6 memoryzhDISTO™ pro4 / pro4 a-1.0.0zh135donezh136DISTO™ pro4 / pro4 a-1.0.0zhPD-Z06Please select end coverDISTOPD-Z23 PD-Z09zhDISTO™ pro4 / pro4 a-1.0.0zh137zhPD-Z30PD-Z12PD-Z83PD-Z34138DISTO™ pro4 / pro4 a-1.0.0zhPD-Z82PD-Z38M4(2x)PD-Z31zh46 mm A1 /4PD-Z51DISTO™ pro4 / pro4 a-1.0.0zh139Measurement settings1 2 3 4 5PD-Z37reference offset timer laser trackingzhMeasurement reference1 Front 2 Stand 3 RearPD-Z40Menu1 measure settings 2 end cover 3 basic settings 4 basic functions 5 calculation 6 memoryPD-Z39140DISTO™ pro4 / pro4 a-1.0.0zhPD-Z78zhAdd / Subtract1 Add 2 Subtract 3 Off1.2Add1.2.1+0.000mDISTO™ pro4 / pro4 a-1.0.0zh141Once1.3.1zhSubtract1.2.2Time delay release1 Once 2 Permanent 3 Off1.310 sec-142DISTO™ pro4 / pro4 a-1.0.0zhPermanent1.3.210 seczhLaser1 normal 2 permanent1.4DISTO™ pro4 / pro4 a-1.0.0zh143Transfer Tracking1 on 2 off1.6 Menu1 measure settungs 2 end cover 3 basic settings 4 basic functions 5 calculation 6 memory1.51 on 2 results only 3 offzhend cover1 without end cover 2 adapter end cover 3 recognition2144DISTO™ pro4 / pro4 a-1.0.0zhpivot gap2.2.40.000madapter end cover1no add-on 2 accessory 723775 3accessory 723776 4 pivot gap 5 individual extens.zh2.2DISTO™ pro4 / pro4 a-1.0.0zh145recognition1 on 2 off2.3zhindividual extens.2.2.50.000m146DISTO™ pro4 / pro4 a-1.0.0zh, 2x menu1 measure settings 2 end cover 3 basic settings 4 basic functions 5 calculation 6 memory0zhbasic settings1 units 2 language 3 beep 4 reset 5 lighting 6 switch off3units3.10.000 m1 0.000m 2 0.00m 3 0.00feet 4 0'00"/32DISTO™ pro4 / pro4 a-1.0.0zh147/ language 3.2English1 Deutsch 2 English 3 Françaiszhlighting1 on 2 off3.5Beep1 measure 2 key 3off3.3148DISTO™ pro4 / pro4 a-1.0.0zh, 3x menu1 measure settings 2 end cover 3 basic settings 4 basic functions 5 calculation 6 memoryzhbasic settings1 ¸maximumtracking 2 minimumtracking 3 requireddistance 4 pythagoras 5 height 6 accuracy4maximumtracking4.1--.---mPD-Z20DISTO™ pro4 / pro4 a-1.0.0zh149zhPD-Z21minimumtracking4.2 required destance1 constant 2 variable4.3--.---m150DISTO™ pro4 / pro4 a-1.0.0zhPD-Z43n: 01constants a x x a x 0.000m 0.000m 4.3.1n: 01 0.000mzh-0.125mDISTO™ pro4 / pro4 a-1.0.0zh151variable 1 1 2 3 0.000m 0.000m 0.000m4.3.2zhn n n1.5 m2 3011.75 mPD-Z43021.5 m031.5 m1-20n: 03 0.325mn: 02 0.000mn: 01 -0.518m152DISTO™ pro4 / pro4 a-1.0.0zhPythagoras 1 2 3PD-Z444.4zhPD-Z27DISTO™ pro4 / pro4 a-1.0.0zh153PD-Z38Pythagoras 1 11.494m4.4zh2 3 Pythagoras Pythagoras 1 2 3 11.494m 08.529m 4.4 1 08.751m 4.411.494m8.529mPythagoras 1 2 3 11.494m 08.529m 08.593m 4.48.593m154DISTO™ pro4 / pro4 a-1.0.0zhheight 1 2 3 11.454m 08.762m4.508.762mheight 1 2 3PD-Z324.5 height 1 2 3 11.454m 4.5zh11.454mDISTO™ pro4 / pro4 a-1.0.0zh155height4.5accuracy4.6105.595mheight 1 11.454m 08.762m 08.515m 2 34.5n: 10 08.515maccuracy 4.6zh08.515m --.---m156DISTO™ pro4 / pro4 a-1.0.0zhaverage average 4.74.7, 4x menu1 measure settings 2 end cover 3 basic settings 4 basic functions 5 calculation 6 memoryn: ---.---mn: 01 03.242m 03.242mtriangle SSS 1 2 35.1zhcalculation1 triangle SSS 2 triangle SH 3 trapeze HSH 4 trapeze HSD 5 gable area 6 circle5DISTO™ pro4 / pro4 a-1.0.0zh157triangle SSS 1 triangle SSS 1 3.118m 3 04.003m2 5.1 2 02.379m 69.8°5.1zh2 303.118mtriangle SH 1 2 5.2 triangle SH 1 2 03.147m 5.203.147m158DISTO™ pro4 / pro4 a-1.0.0zhtrapeze HSH 1 2 35.3 trapeze HSH 1 2 3 03.739m 5.303.739mzhtriangle SH5.2103.439m2DISTO™ pro4 / pro4 a-1.0.0zhPD-Z66159trapeze HSH 1 2 trapeze HSH 1 2 3 03.739m 02.665m 5.3 3 03.108m 31.0° 12.096m25.3 trapeze HSD 1 2 3 5.4zh02.665mPD-Z67160DISTO™ pro4 / pro4 a-1.0.0zhtrapeze HSD 1 2 3 03.516m 05.373m5.4 trapeze HSD 1 2 3 06.996m 39.8° 30.932m2 5.405.373mtrapeze HSD 1 2 3 03.516m 5.4zh03.516mDISTO™ pro4 / pro4 a-1.0.0zh161PD-Z68gable area 1 2 35.5gable area 1 2 3 03.547m5.5gable area5.503.547m1 53.789m2zhgable area 1 2 3 03.547m 09.812m5.509.812m162DISTO™ pro4 / pro4 a-1.0.0zhcircle 15.6zhcircle 1 00.250m25.6space 1 2 35.7DISTO™ pro4 / pro4 a-1.0.0zh163space 1 2 3 04.563m5.7space 1 2 3 4 026.369m2 082.632m 020.684m 105.344m325.7 , 5x Menu1 measure settings 2 end cover 3 basic settings 4 basic functions 5 calculation 6 memory04.563mzhmemory1 2 3 4 memory key 1-9 1-9 recall key stack data6164DISTO™ pro4 / pro4 a-1.0.0zhmemory key 1-96.110.000 , + ... +5.125zhmemory key 1-96.1 1-9 recall key 6.2,+...+30.00019.723DISTO™ pro4 / pro4 a-1.0.0zh0.000165stack6.317.891zh1-9 recall key6.215.125stack 6.317.891166DISTO™ pro4 / pro4 a-1.0.0zh...zhdata1 text 2 store 3 change 4 erase 5 send6.4 text 6.4.1 store 6.4.2001abc002_>abc2.493DISTO™ pro4 / pro4 a-1.0.0zh167store _>6.4.2002Hallway Shower WC Bathabc2.493zh168DISTO™ pro4 / pro4 a-1.0.0zhchange6.4.3200:200 : 25%send1 all 2 position6.4.55.125merase entire memory ? zhDISTODISTO™ pro4 / pro4 a-1.0.0zh169position6.4.5.2001-> 200-> , 6xzhmenu2 end cover 3 basic settings 4 basic functions 5 calculation 6 memory 7 calculatorcalculator1 division 2 x2 3 square root7.../13.510m--.---m170DISTO™ pro4 / pro4 a-1.0.0zhPD-Z52PD-Z55zhà ë Á 30 m (× «) 30 - 100 m (Ø «) © õ Scotch Cal* Engineering-Grade 3279 (7502 99 61 036)*DISTO™ pro4 / pro4 a-1.0.0zh171PD-Z56zh¼¤ ¹â µãPD-Z6134 mmPD-Z57172PD-Z60PD-Z59DISTO™ pro4 / pro4 a-1.0.0zh。
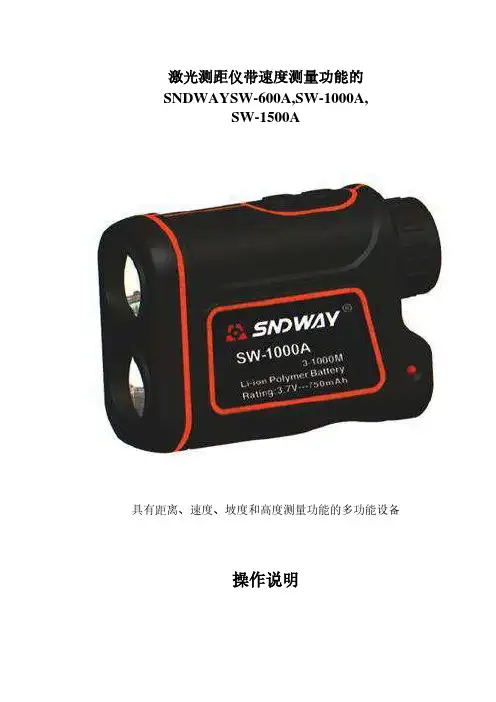
激光测距仪带速度测量功能的SNDWAYSW-600A,SW-1000A,SW-1500A具有距离、速度、坡度和高度测量功能的多功能设备操作说明该产品的设计符合标准:GB/T14267-2009广东制造,货号:00000950安全说明使用前仔细阅读安全要求和操作说明在使用该设备之前,请阅读所有的安全和操作说明。
任何未在这些说明中描述的措施都可能导致设备发生故障,影响测量的准确性或对用户或第三方造成伤害。
请勿自行打开或修理该装置。
严禁对激光发射器的功能做任何修改或调整。
妥善存放设备,不要让儿童接触到它,避免未经授权的人使用。
切勿将激光发射器对准自己或旁人,对准你身体的任何部位或任何高度反射的物体。
该设备的电磁辐射会对其他电子设备造成干扰。
不要在飞机上或医疗设备附近使用本装置。
不要在爆炸性或易燃性环境中使用本设备。
不要将废旧电池和无法使用的电器与家庭垃圾一起处理。
请按照现行法律和关于处理此类设备的规定来处理设备。
如果您在使用过程中遇到任何问题或疑问,请立即联系您的SNDWAY官方代表,我们将尽快帮助您解决问题。
感谢你购买SNDWAY手持式激光测距仪!带倾斜测量功能的SNDWAY多功能激光测距仪是一款集双筒望远镜和激光测距仪功能于一体的便携式激光倾斜测距仪。
主要应用。
•对于物体的详细检查,测量静态物体或低速移动且在可视范围内的物体。
该仪器的特点是测量精度高,测量速度快,可检测参数的可视化。
经济性:提供自动断电和低耗电。
•多功能激光测距仪结合了最新技术,可同时显示物体的距离和倾角。
在确定与物体的距离时,它可以显示到目标点的线路与地面的角度(仰角定义为正,俯角定义为负),相对高度和可见地平线的范围。
激光发射器的功率足够低,对人眼来说很安全。
它能够测量任何物体的范围,其体积小、重量轻,便于携带。
它由一个可充电的锂离子电池供电。
测距仪广泛用于电力设施(复杂的测量和扫描功能可以方便地检查远处的物体,如电力线和电线杆)、高速铁路、公用事业、林业设计、建筑、互联网通信设计、通信线路的检查和维修等,在开放的乡村和高尔夫、狩猎和野营旅行中使用。
使用激光测距仪进行测绘的步骤解析激光测距仪是一种先进的测绘仪器,通过激光技术精确测量距离。
在进行测绘工作时,使用激光测距仪可以提高测量的准确性和效率。
下面将解析使用激光测距仪进行测绘的步骤。
1. 设定基准点和坐标系在使用激光测距仪进行测绘之前,需要确定一个基准点,并建立合适的坐标系。
基准点可以是已知的地理位置,如政府测绘局的测量点,也可以是自己选定的具备稳定性的固定点,如建筑物角点或测量桩。
坐标系的选择要符合实际需要,常用的有直角坐标系和极坐标系。
2. 安装和调试激光测距仪将激光测距仪安装在三脚架上,并保持水平稳定。
打开测距仪并进行校准,确保其准确度和稳定性。
校准时需要保证测量的水平和垂直方向的精度,可以使用校准板进行校准。
3. 确定测量对象和测距模式根据实际需要,确定要进行测绘的对象,可以是建筑物、道路或地形地貌等。
选择合适的测量模式,如单次测距、连续测距或间隔测距等。
连续测距模式适用于需要对目标进行连续监测的情况,而单次测距模式适用于对单个目标进行测量的情况。
4. 选择合适的测量点根据实际需要,选择合适的测量点进行距离测量。
在选择测量点时,要考虑到安全因素和周围环境的影响,确保测量的准确性和可靠性。
5. 进行测距操作将激光测距仪对准目标,并观察激光指示点。
按下测量按钮,激光测距仪会发射激光束,并在目标上形成一个光点。
接收到反射回来的激光束后,测距仪会自动计算出距离,并显示在屏幕上。
6. 记录和处理数据在测距完成后,需要将测量结果记录下来,并进行相应的数据处理。
使用计算机或其他测绘软件,可以将测量数据导入其中,并进行后续的处理和分析。
根据实际需要,可以生成各种测绘图表和报告。
总结:激光测距仪作为一种精确测量距离的工具,其使用步骤相对简单。
首先需要设定基准点和坐标系,然后安装和调试激光测距仪。
确定测量对象和测距模式后,选择合适的测量点进行测距操作。
最后,将测量结果记录并进行数据处理。
在实际应用中,激光测距仪可以广泛应用于土地测量、建筑设计、线路规划等领域,提高了测绘工作的准确性和效率。
本科毕业设计(论文)通过答辩 目 录 摘要 .................................................................................................................................. 1 关键词 .............................................................................................................................. 1 1 前言 ............................................................................................................................... 3 1.1激光测距研究及发展现状 ......................................................................................... 3 1.2课题的研究目的和意义 ............................................................................................. 4 1.3课题研究的内容 ......................................................................................................... 7 2 相位式激光测距技术研究 ........................................................................................... 7 2.1相位式激光测距技术原理 ......................................................................................... 7 2.2相位式激光测距多测尺原理 ..................................................................................... 9 2.3差频测相原理 ........................................................................................................... 11 2.4自动增益控制原理 ................................................................................................... 12 2.5光电探测器 ............................................................................................................... 13 3 相位式激光测距仪控制电路的设计 ......................................................................... 18 3.1相位式激光测距仪的整体设计 ............................................................................... 18 3.2光电检测器的选择 ................................................................................................... 19 3.3APD高压偏置电路的设计 ....................................................................................... 20 3.4温度补偿电路 ........................................................................................................... 23 3.5自动增益控制电路AGC.......................................................................................... 27 3.6混频电路 ................................................................................................................... 32 4 相位式激光测距仪软件系统设计 ............................................................................. 34 5 仿真结果及分析 ......................................................................................................... 35 5.1APD高压偏置电路的仿真结果及分析 ................................................................... 35 5.2自动增益控制电路的仿真结果及分析 ................................................................... 39 6 结论 ............................................................................................................................. 42本科毕业设计(论文)通过答辩 参考文献 ......................................................................................................................... 43 致谢 ................................................................................................................................. 43 附录 ................................................................................................................................. 48 本科毕业设计(论文)通过答辩
1 手持式激光测距仪的设计
摘 要:本文首先介绍了相位式激光测距仪的研究背景、意义,总结和概括了激光测距的有关
理论基础,并且介绍了相位式激光测距仪的测距原理,提出了测距系统的实现框图;接着围绕接收系统的性能开展深入研究,主要研究探测器件的选择,偏压电路、混频电路、自动增益控制电路的设计等问题;利用Proteus技术对APD偏压电路和自动增益控制电路进行仿真,通过仿真结果不断完善设计,并对这一设计进行研究、发展和创新,使得测距系统的测量精度得到了很好的保证及提高,降低了硬件成本,简化了控制电路。 关键词: 激光测距;雪崩二极管;相位;混频;自动增益控制 本科毕业设计(论文)通过答辩
2 Design of Hand-held Type Laser Rangefinder
Abstract: This paper started from the background, the purposes, meanings of phase-shift laser
ranging, then summarized the related theoretical basis of it. The principle of phase laser ranging and a practical ranging system is discussed. This paper concentrate on the researh of improving the porperty of receiving system. Lots of research have done on choosing detection element,design of the bias circuit and automatic gain control circuit. Then,the proteus is used for simulation of them. With the help of the simulation, the design was improved,and with the research, development and innovation of the technology, we have ensured and developed the measurement accuracy of the ranging system, reduced the cost of the hardware and simplified the control circuit. Key Words: laser ranging; avalanche diode; phase; mixer circuit; automatic gain control