-硬件在环仿真在汽车控制系统开发中的应用及关键技术_齐鲲鹏
- 格式:pdf
- 大小:262.63 KB
- 文档页数:4
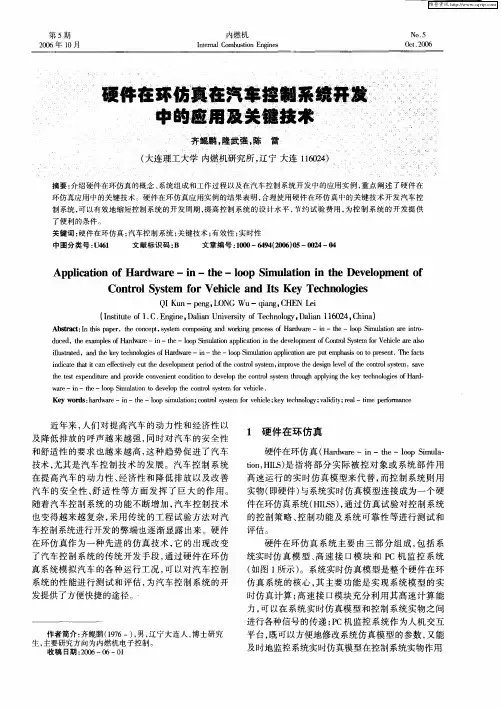
硬件在环汽车驾驶模拟器系统开发作者:孙荣强陈焕明刘大维来源:《青岛大学学报(工程技术版)》2019年第02期摘要:; 为提高硬件在环仿真过程中实时监控的精度,本文基于xPC Target实时仿真实验平台,开发了硬件在环汽车驾驶模拟器系统。
采用Matlab/Simulink软件,对车辆参数和道路环境等进行配置,搭建仿真模型,同时结合转向盘转角传感器、制动/油门踏板传感器和数据采集卡等硬件设备,实现外部硬件对虚拟车辆运动的控制,完成相关硬件在环仿真实验。
以某型轿车为例,在平坦标准道路上的转向性能进行模拟,对驾驶模拟器系统的性能进行测试。
实验结果表明,该系统的实时性和精度满足汽车动力学仿真实验的要求,为研究和开发驾驶辅助系统提供了实验平台,具有广阔的应用前景。
关键词:; 驾驶模拟器; xPC Target; 硬件在环; veDYNA中图分类号: U467; TP27文献标识码: A随着汽车工业的迅猛发展,汽车从设计到进入市场,周期越来越短,而设计研发需要耗费大量的精力物力,特别是实车实验,不仅危险而且十分复杂。
硬件在环仿真作为一种实时仿真技术已经被广泛应用于汽车研发过程,硬件在环仿真是将外部实物通过计算机接口嵌入到软件环境中,代替一些难以用数学模型描述的问题,提高仿真精度[13]。
基于驾驶模拟器的硬件在环试验台,利用计算机仿真及电子、控制等相关技术,许多研究者从人-车-路“闭环系统”整体性能出发[4],对驾驶员行为和道路环境等进行仿真研究。
B.A.Güvene等人[5]利用dSPACE、xPC TargetBox、Vehicle Simulator和工控机等开发了一套车辆硬件在环控制系统,并利用其对车辆偏航稳定性控制器进行控制效果的评估;王野等人[6]基于dSPACE实时仿真系统,利用Controldesk和Matlab开发实验台监控程序,通过典型工况对硬件在环实验台进行功能验证;李幼德等人[7]基于dSPACE实时仿真平台,以CarSim/Simulink联合仿真,搭建驾驶模拟器系统,实现各种模拟实验条件,对驾驶员制动意图模型进行训练和开发;李升波等人[8]搭建了基于xPC的驾驶员辅助系统硬件在环仿真实验台,以模块化思路建立仿真模型,采用S函数驱动主界面方法,解决了硬件在环仿真过程进行实时监控的问题。
硬件在环技术在汽车上的应用研究随着科技的快速发展,硬件在环技术在汽车上的应用研究已成为汽车工程领域的热点。
环保意识的增强以及对可持续发展的追求,使得环技术在汽车行业中的应用变得愈发重要。
本文将从减少尾气排放、提高燃烧效率和减少能耗等方面,探讨硬件在环技术在汽车上的应用研究。
首先,硬件在环技术在汽车上的应用研究的一个重要方面是减少尾气排放。
在传统的汽车尾气排放中,二氧化碳、氮氧化物和颗粒物等有害物质是主要的排放物。
为减少尾气排放,硬件方面可以研究和发展更高效的废气处理系统和排放控制装置,例如颗粒捕集器、尾气再循环系统和催化剂等。
这些技术可以有效降低有害物质的排放量,达到减少尾气污染的目的。
其次,硬件在环技术在汽车上的应用研究还可以提高燃烧效率。
燃烧效率是指在燃料燃烧时产生的能量与实际有效利用的能量之比。
提高燃烧效率可以使汽车燃料的利用更加高效,减少燃料的浪费和排放。
硬件方面可以研究和发展更先进的燃烧室设计和燃烧控制系统,例如高压直喷技术和点火系统等。
这些技术可以改善燃料的燃烧过程,提高燃烧效率,减少排放。
再次,硬件在环技术在汽车上的应用研究还可以减少能耗。
能耗是指汽车在行驶过程中所消耗的能量。
减少能耗不仅可以减少对能源的依赖,还可以降低对环境的影响。
硬件方面可以研究和发展更节能的汽车动力系统和辅助设备,例如混合动力系统和智能节能系统等。
这些技术可以有效地降低汽车的能耗,减少能源的浪费和排放。
总之,硬件在环技术在汽车上的应用研究具有重要意义。
减少尾气排放、提高燃烧效率和减少能耗是硬件在环技术在汽车上的主要应用方向。
未来,随着技术的不断进步和创新,硬件在环技术在汽车上的应用研究将会为实现清洁、高效和可持续的汽车出行提供更多可能性。
基于dSPACE硬件在环仿真的纯电动汽车整车控制器开发金小飞;赵韩;李杨
【期刊名称】《机电工程技术》
【年(卷),期】2012(041)008
【摘要】整车控制技术是电动汽车的核心技术之一,也是我国在新能源汽车领域自主研发能力的体现.基于Freescale公司双核处理器9S12XET256开发了一款通用型纯电动汽车整车控制器.设计时考虑硬件的通用性,使之适用于多种纯电动汽车的整车控制,并以某企业研发的纯电池动力轿车为控制对象,在基于dSPACE的硬件在环仿真系统上进行了一系列仿真试验.试验结果显示:VCU能够准确地控制整车实现多种工作模式下的运行工作状态,初步实现了设计目标.
【总页数】6页(P1-6)
【作者】金小飞;赵韩;李杨
【作者单位】合肥工业大学机械与汽车工程学院,安徽合肥 230009;合肥工业大学机械与汽车工程学院,安徽合肥 230009;合肥工业大学机械与汽车工程学院,安徽合肥 230009
【正文语种】中文
【中图分类】U482.3
【相关文献】
1.纯电动汽车整车控制器硬件在环仿真测试 [J], 王春芳;吴海啸
2.基于dSPACE的混合动力客车整车控制器硬件在环系统开发 [J], 程小平
3.基于SPC5634的纯电动汽车整车控制器软件开发与实验 [J], 邓涛; 邓彪; 宋刚
4.基于SPC5634的纯电动汽车整车控制器软件开发与实验 [J], 邓涛; 邓彪; 宋刚
5.基于dSPACE的纯电动汽车整车HIL建模及测试 [J], 江南雨;武冬梅;杜常清;熊建昌
因版权原因,仅展示原文概要,查看原文内容请购买。
硬件在环技术在汽车变速器开发中的应用作者:韩小伟,王文龙来源:《黑龙江工业学院学报(综合版)》 2018年第5期韩小伟1,王文龙2(1.芜湖职业技术学院,安徽芜湖241006;2.邢台职业技术学院,河北邢台054000)摘要:随着2017年汽车销量快接近3000万大关的时候,如何更快更好地推出新的车型满足市场需求,成为了各大整车开发企业迫在眉睫的任务。
然而,作为汽车核心子系统之一的变速器总成,国内对于汽车变速器开发相对起步较晚,尤其是自动变速器的开发,一直受制于国外资源,已经跟不上蓬勃发展的汽车事业。
基于以上考虑,在变速器开发流程中引入硬件在环测试仿真技术,研究如何利用硬件在环测试技术,压缩变速器开发周期,减小变速器开发风险。
关键词:变速器开发;硬件在环测试;开发周期;台架测试中图分类号:U469.72 文献标识码:A作者简介:韩小伟,硕士,讲师,芜湖职业技术学院汽车工程学院。
王文龙,硕士,讲师,邢台职业技术学院汽车工程系。
基金项目:安徽省高校省级质量工程“名师工作室”(编号:2014msgzs173);安徽省高校省级质量工程“高校自然科学研究重点项目”(编号:KJ2016A755);安徽省高校省级质量工程“专业综合改革试点”(编号:2014sjjd074);安徽高校省级质量工程“专业综合改革试点”(编号:2015zy087)。
近年来,随着国家对汽车行业的支持力度逐年增加,以及自主品牌汽车销量的突飞猛进,新车型及其子部件的研发能力以及研发周期越来越成为约束国内汽车行业发展的因素,也成为了是否具备“爆款”潜力的前提。
当前的主流开发模式,主要基于著名的V模型,其开发流程为:定义开发目标→建立系统架构及规范→开发子系统规范→完成设计及样件开发→子系统试验验证→系统集成及验证→总成验收。
按照开发目标的复杂程度,此开发流程会相应地增减部分环节,而开发周期也会发生变化。
一般来说,对于一个全新的整车平台,不算上市场调研,项目立项准备以及其他非工程关键事项讨论耗时,从项目启动开始计算,到产品总成验收,36个月的开发周期已经是比较理想的状态了。
整车控制器硬件在环仿真系统设计于兰;辛明华【摘要】基于安全性、可行性以及成本的考虑,硬件在环仿真测试已经成为整车控制器开发流程中非常重要的环节.搭建基于MATLAB/dSPACE的纯电动汽车整车控制器硬件在环仿真测试系统,该系统以dSPACE实时处理器运行仿真模型来模拟受控对象的运行状态,通过I/O接口与被测的整车控制器连接,对整车控制器进行系统的测试.该系统能够减少实车路试的次数、缩短开发时间、降低成本,同时提高整车控制器的软件质量,降低整车厂的风险.【期刊名称】《汽车工程师》【年(卷),期】2018(000)006【总页数】3页(P48-49,58)【关键词】硬件在环;整车控制器;仿真测试;监控界面【作者】于兰;辛明华【作者单位】天津天瞳威势电子科技有限公司;中国汽车技术研究中心【正文语种】中文硬件在环仿真又称为半实物仿真。
它除了用数学模型描述客观事物外,还将部分实物硬件接入仿真系统,使仿真系统更逼近真实系统[1]。
在新能源汽车领域中,硬件在环仿真测试对三大核心电控系统(整车控制系统、BMS电池管理系统及MCU电机控制器)非常重要,但其高精度的实时性要求、大电压大电流的安全性、信号接口的特殊属性以及系统的可扩展性等问题都使得传统汽车电控系统的硬件在环仿真测试系统无法解决。
基于此,文章提出一种纯电动汽车整车控制器硬件在环仿真测试系统。
1 系统组成硬件在环仿真测试系统是以实时处理器运行仿真模型来模拟受控对象的运行状态,通过I/O接口、CAN接口、A/D转换及D/A转换与被测的整车控制器连接,对被测整车控制器进行全方面的、系统的测试。
硬件在环系统架构,如图1所示。
PC上位机通过以太网与实时处理器通讯,实时处理器与外围的I/O板通过ISA总线构成多处理器系统。
处理器之间的数据传输速率高达1 Gb/s以上。
I/O板和处理器之间可通过共享内存/光纤接口进行数据交换。
用户可以根据自己的需要扩展处理器模板,以构建合适的仿真系统。
实 验 技 术 与 管 理 第38卷 第2期 2021年2月Experimental Technology and Management Vol.38 No.2 Feb. 2021ISSN 1002-4956 CN11-2034/TDOI: 10.16791/ki.sjg.2021.02.027自动驾驶汽车硬件在环仿真实验平台研发雍加望1,2,冯能莲3,陈 宁1(1. 北京工业大学 北京市交通工程重点实验室,北京 100124;2. 清华大学 汽车安全与 节能国家重点实验室,北京 100084;3. 北京工业大学 环境与生命学部,北京 100124)摘 要:自动驾驶汽车作为重点竞争领域将是今后一个时期内国内外汽车工业发展的主流趋势。
为使学生更全面地理解并掌握自动驾驶汽车关键技术,研发了自动驾驶汽车硬件在环仿真实验平台(A VHIL )。
A VHIL 硬件层面集成了实车制动系统、转向系统、传感器系统以及网络通信系统,可提供完整的整车硬件在环实验环境;A VHIL 软件层面以MATLAB/Simulink 为核心构建快速控制原型算法,基于PreScan 软件提供虚拟现实界面和环境感知类传感器模块,利用CarSim 软件实时运行整车动力学模型。
A VHIL 为自动驾驶上层控制算法与底层执行机构的开发与测试、高级驾驶辅助系统开发与测试、驾驶员行为特性研究等提供了实时高效的仿真平台,为本科生教学与研究生实践奠定了实验基础。
关键词:自动驾驶;硬件在环;仿真;实验平台中图分类号:U467.3 文献标识码:A 文章编号:1002-4956(2021)02-0127-05Development of hardware-in-the-loop simulation experimentalplatform for automatic driving vehicleYONG Jiawang 1,2, FENG Nenglian 3, CHEN Ning 1(1. Beijing Key Laboratory of Traffic Engineering, Beijing University of Technology, Beijing 100124, China; 2. State Key Laboratory of Automotive Safety and Energy, Tsinghua University, Beijing 100084, China;3. Faculty of Environment and Life, Beijing University of Technology, Beijing 100124, China)Abstract: As a key competition area, the automatic driving vehicle will become the main trend of the development of automobile industry at home and abroad in the next period. In order to enable students to understand and master the key technologies of autopilot, a hardware-in-the-loop simulation experimental platform (A VHIL) is developed. The hardware level of A VHIL integrates the real vehicle braking system, steering system, sensor system and network communication system, which can provide a complete vehicle hardware-in-the-loop experimental environment. At the A VHIL software level, the rapid control prototype algorithm is constructed with MATLAB/ Simulink as the core. The virtual reality interface and environment sensing sensor module are provided based on PreScan software, and the vehicle dynamic model is run in real time by CarSim software. A VHIL provides a real-time and efficient simulation platform for the development and test of the upper control algorithm and the underlying actuator, development and test of advanced driving assistance system and research of driver behavior characteristics, which lays an experimental foundation for undergraduate teaching and graduate practice. Key words: automatic driving; hardware-in-the-loop; simulation; experimental platform世界汽车工业发展围绕着“安全、舒适、节能”收稿日期: 2020-05-15基金项目: 北京工业大学交通工程科研基地开放探索项目(2019BJUT-JTJDS012);汽车安全与节能国家重点实验室开放基金课题(KF2010);北京工业大学教育教学研究项目(ER2011-A03)作者简介: 雍加望(1988—),男,安徽巢湖,博士,讲师,主要从事自动驾驶汽车、汽车动力学与稳定性控制方面的研究。

硬件在环仿真技术在汽车工程教学中的应用摘要:硬件在环仿真技术不仅提出新观点而且提供新的思想进课堂。
此技术大大有助于训练学生建构方法,研究,测试,寻求解决方案,有科研人员的头脑并深入思考问题。
然而,现阶段传统的教学方式存在不足,故硬件在环仿真实验开始逐渐替代传统的教学模式。
本文利用硬件在环实例进行讲解,从而体现出它的优势。
【关键词】:^p :硬件在环;汽车工程;教学目前虚拟仿真技术在实践教学中的应用已成为趋势,特别是硬件在环仿真的应用可以弥补实验硬件条件的不足,尤其在高等教育大众化背景下,到实际工厂企业实践不足的难题,也是对卓越工程师培养实践条件的有力支撑。
汽车学院将结合车辆工程、汽车服务工程、能动力工程的特点进行汽车及其零部件虚拟设计、加工、装配、维修、营销服务、发动机、汽车智能控制等进行硬件在环仿真、实践内容、训练方法等研究,以提高实践教学的效果。
一、硬件在环仿真系统简介硬件在环(HIL,hardware-in-the-loop)仿真,又称半实物仿真,是将需要仿真的部分系统硬件直接放到仿真回路中的仿真系统,它不仅弥补了纯数字仿真中的许多缺陷,提高了整个模型的置信度,而且可以大大减轻编程的工作量。
这种仿真的另一个优势在于它实现了仿真模型和实际系统间的实时数据交互,使仿真结果的验证过程非常直观,大大缩短了产品开发周期。
仿真时,电脑与实际硬件通过各种信息通道相连,电脑与实际硬件共同完成仿真工作,并将仿真结果在电脑中进行分析^p ,从而判断硬件的运行情况。
二、应用案例本文以汽车制动系统为例,来讲解硬件在环仿真技术在汽车工程教学中的应用。
研究制动系统之前,必须要了解掌握汽车的理论知识。
学生要通过学得的知识来设定制动系统的控制策略。
如果仅限于教师的传统课题讲授,学生难以完全掌握其中的要领,教学效果不佳。
此系统我们选择制动系统液压总成(HCU,High Care Unit)为实物,一般由增压阀(常开阀)、减压阀(常闭阀)、回液泵、储能器组成。
硬件在环技术在汽车上的应用研究作者:吴志敏来源:《科技视界》 2013年第19期吴志敏(南京林业大学,江苏南京 210037)【摘要】随着汽车的普及,人们对于汽车的测试要求也在逐渐提高,传统的人工测试程序十分耗时且效率低下。
基于“V”模式的硬件在环仿真作为一种可行的测试手段,通过 HIL可以在“虚拟车辆”中对控制器进行大量测试,而无需真实的车辆便可达到测试需求。
HIL(硬件在环)测试系统可模拟驾驶员、车辆及其工作环境,降低测试风险,缩短开发周期,节省开发成本。
HIL的高效性、专业性、实时性使得它应用于各个行业。
【关键词】硬件在环;HIL;测试系统;汽车0 前言随着汽车工业的迅速发展,人们对汽车的安全性、动力性、经济性、舒适性、排放等提出了日益严格的要求,而这些性能又很大程度受ECU性能的影响。
ECU复杂性和功能性不断增加,为确保最终产品质量,需要通过自动化测试手段来减少从定义、分析、设计到实现不同产品周期环节的人为失误,并且符合相关标准。
采用传统的道路试验的方法来测试汽车的性能不仅浪费成本,浪费时间,而且工艺复杂,效率不高。
随着计算机软件技术的发展与成熟,可通过软件与硬件相结合可实现HIL,即硬件在环测试,不仅可以缩短开发周期而且可靠性强。
1 硬件在环结构硬件在环是当今许多行业(航空,国防,汽车,医疗设备等)都采用“V”模式模型控制器开发的重要环节,如图1所示。
HIL(Hardware-in-the-Loop)硬件在环仿真测试系统是以实时处理器运行仿真模型来模拟受控对象的运行状态,通过I/O接口与被测的ECU连接,对被测ECU进行全方面的、系统的测试。
一个HIL测试系统由三个主要部分组成:一个实时处理器,I/O接口和一个操作界面。
如图2所示,实时处理器是HIL测试系统的核心。
它提供大多数HIL测试系统的确定执行,例如硬件I/O通信,数据资料记录,激励生成和模型执行。
要精确地仿真测试系统中物理上并不存在的部分,一个实时系统是非常必要的。
智能网联汽车硬件在环虚拟仿真实验平台设计开发随着智能网联汽车技术的不断发展,越来越多的汽车制造商和科研机构开始将注意力集中在智能网联汽车硬件的设计和开发上。
为了有效地测试和验证这些硬件设备的性能和可靠性,设计和开发一个基于虚拟仿真的实验平台变得尤为重要。
本文将讨论智能网联汽车硬件在环虚拟仿真实验平台的设计和开发。
首先,为了设计和开发一个有效的智能网联汽车硬件在环虚拟仿真实验平台,需要确定仿真系统的整体框架和组成部分。
这些组成部分包括车辆仿真模型、传感器模型、通信模块和控制器模型等。
通过合理的组合和配置这些模型,可以在虚拟环境中完整地模拟智能网联汽车的硬件系统。
其次,智能网联汽车硬件在环虚拟仿真实验平台的设计和开发需要依靠先进的仿真软件和工具。
目前市场上有很多成熟的汽车仿真软件,如CarSim、ADAMS和Vissim等,这些软件具有强大的仿真和建模能力,能够实现真实的汽车行驶环境和各种场景的模拟。
通过使用这些软件,可以方便地进行智能网联汽车硬件在环虚拟仿真实验的设计和开发。
同时,智能网联汽车硬件在环虚拟仿真实验平台的设计和开发还需要考虑到与实际硬件设备的接口和通信。
在虚拟仿真环境中,需要设计和开发模拟传感器和控制器的模型,以模拟真实硬件设备的输入和输出,并与仿真系统进行通信。
这样可以在仿真环境中测试和验证智能网联汽车硬件设备的性能和可靠性。
此外,智能网联汽车硬件在环虚拟仿真实验平台的设计和开发还需要考虑到不同场景下的测试和验证需求。
智能网联汽车在不同的道路条件、环境和交通状况下都需要具备良好的性能和可靠性。
因此,在虚拟仿真实验平台中,需要设计和开发不同场景的仿真模型,以模拟各种不同的道路条件、环境和交通状况,并对智能网联汽车硬件设备进行测试和验证。
最后,智能网联汽车硬件在环虚拟仿真实验平台的设计和开发需要进行充分的测试和验证。
在开发过程中,需要对虚拟仿真实验平台的各个组成部分进行测试和验证,以确保其能够准确地模拟智能网联汽车的硬件系统。
硬件在环仿真在汽车控制系统开发中的应用].\'谢十.计算.研究'硬件在环仿真在汽车控制系统开发中的应用清华大学朱辉北京轻型汽车有限公司面北京理工大学程昌圻6争【Abstract]The}1ardware—in—the一1o0psimdationtechnicsmaybeadopindevdopmentofamamo~h~mtrol systemtotthesoftwareandha|doftheamtrolsystem.Thehardware—in—the—lov9simulationisalsoclassifiedandseveraXt)tpjapplicat[ortexamplesofthehm-dwat-e—in—the—l∞psimulation81"egivninthe..uofdevelopmtmt.ftheautomobilecontrolsystem.【摘要】在汽车控制系统开发中.采用硬件在环仿真技术可以对控制系统软硬件进行测试.对硬件在环仿真进行了分类,给出了汽车控制系统开发过程中硬件在环仿真几种典型应用实例. Topicwords:Simulation-Controlsystem.概述主题电等毳控制输入输出汽车是一个高度复杂的系统,对该系统进行综台控制已成为技术发展的必然趋势.采用动态仿真和硬件在环仿真技术可提高重复设计的效率.纯软件动态仿真是优化系统设计的最佳方案.设计者可以通过改变控制系统参数来观察系统性能的变化.模型实时执行实现了硬件在环仿真.通过将系统中关键硬件与复杂的仿真模型集成,可进行各种测试和性能评估.纯软件的动态仿真和硬件在环仿真技术的结台是传统工程试验方法的重大发展.硬件在环仿真是指被仿真环节中存在实物硬件的实时动态仿真技术,与一般动态仿真的区别是: a.硬件在环仿真模型的时间标尺t相等,需要采用实时仿真算法,而动态仿真则不用.b.硬件在环仿真对硬件系统性能要求高,需要有信号输入,输出接口.而动态仿真则不用.硬件在环仿真的主要类型是控制系统硬件在环仿真,如发动机电子控制单元硬件在环仿真是以发动机为计算模型,电子控制单元为实物;防抱死电子控制单元硬件在环仿真是以防抱死系统中的液力执行机构为计算模型.电子控制单元为实物.蚰年代初,发动机控制单元(简称ECU)基本上采用8位微处理器.只能控制发动机空燃比,点火正时等发动机最基本的参数L1J.到9O年代.已开始使用多个32位微处理器进行动力和传动系统控制,控制器不仅要执行更加复杂的控制算法.而且要同时进行多个系统的综合控制.控制软件不仅要进行数据输入,输出测试,还要进行信息输入输出的测试及1998年第l2期信号的类型和正时关系比较复杂,信号发生器的信号源不能满足要求.而在实际被控对象上进行测试存在费用高,时间长,条件不确定等因素.随着计算机技术的发展,开始使用硬件在环仿真技术进行控制系统软硬件的开发和测试L4J.由于采用现代化软件工程方法.使ECU硬件在环仿真技术的应用渗透到ECU软件开发的各个阶段.ECU硬件在环仿真系统成为ECU开发过程中的主要开发工具之一. 图1是以发动机电子控制单元为例对ECU开发过程及其各阶段所用工具的简单概括.ECU开发在不同的设计阶段需要不同形式的仿真.在控制系统原理性设计阶段.为了减少仿真费用与难度,可以进行非实时性全数字动态仿真【5l6J.由图1可见,在ECU使用之前必须进行台架试验和整车试验,以获取标定数据和对系统软硬件进行最后确认.进行ECU硬件在环仿真可以降低试验费用,缩短ECU开发周期.ECU硬件在环仿真的作用有以下几点:a.进行ECU软硬件测试和验证.b.提供试验系统实时监测数据.监控试验对象,执行器,传感器等的动态特性.e.可以进行在实际中不可能或不易进行的试验,如故障模拟,故障诊断软件测试及紧急状况的处理等.d.可以研究不同控制算法对控制器品质的影响.设计?计算?研究开始发动机,传动系,控制系统夸数字仿真控制系统原型开发ECU硬件在环实时仿真卜学摸1=—=:塑笙!I—1兰三竺竺h巫环仿真系统lL二.二=二二二1.台架试验获得ECUlI1.发动机台架试I卜一所需发动机优化数据I--I验用控制系统H第四阶段2.ECU台架试睦Il2.DcU开发系统I求I图1ECU开发过程及所用开发工具e.试验重复性好.可以分别研究每个参数变化对性能的影响.图2为硬件在环仿真的构成形式.ECU为实物.发动机,驱动系,传感器,执行器等为模型,主要用于ECU的开发与测试.可以将部分或全部执行器以实物的形式参与仿真,用于研究传感器,执行器的实际性能对系统整体性能的影响以及测试信号处理电路与执行器驱动电路的动态特性.图2硬件在环仿真的构成2应用实例2.1测试汽油机的ECU系统德国勃朗施威格工业大学电子测量技术和基础电子技术学院的威施明(U.Varchmin)教授等人开发了汽车信号发生器(简称M0SIG),90年代第一次发表文章_7J简要介绍了MOSIG的功能及其硬件结构,M0SIG即可以与PC机通过RS一232串行通讯口联机使用,也可独立使用.其CPU是l6位的M一96系列单片机.1994年在MTZ上发表文章L8J再一次介绍MOSIG,MOSIG的硬件结构没变, 只是增加了PC机上软件的功能.其发动机模型是基于三维特性图的准线性模型,通过查表与插值来计算发动机输出参数,并且在PC机上可以利用数学表达式来产生所需要的信号形式.2.2测试柴油机的ECu系统北京理工大学于1997年研制出柴油机ECu硬件在环仿真系统L9J,其目的是为柴油机ECU软硬件的开发与测试提供性能良好的开发工具,把DCu 在发动机试验台上所做的工作转换到计算机室,通过ECU硬件在环仿真来完成,可节省资金,面且缩短了开发周期.HILSS是以PC机作为宿主计算机的紧密耦合多处理器并行系统,整个系统由三个子系统组成:发动机模型实时计算系统,接口管理系统和监控系统, 如图3所示.每个子系统由一个独立的处理器来完成.该系统具有以下功能:a.可使ECU硬件在环情况下进行发动机稳态工况与过渡工况的实时仿真.b.可进行ECU及齿杆位移执行器和齿杆位置传感器在环的实时仿真.c.可选择发动机状态参数和控制参数进行图形化和数字化实时显示.d.可对仿真结果进行有选择地存储.并可进行离线处理.e.ECU可以以模型形式参与仿真构成软件在环仿真系统.f.可对仿真结果数据文件及结果曲线进行打印输出.图3HILSS的组成系统枝准后,对BN493柴油机分配泵电控单元进行了两种类型的硬件在环仿真试验.试验1:ECU硬件在环仿真ECU与HILSS的信号联接关系如图4所示,可用于无外加信号驱动调理电路的情况下直接对ECU进行软硬件测试.汽车技术设计-计算-研究试验2:ECU和执行器硬件在环仿真信号联接关系如图5.该类型试验中所用电控系统完全等同于发动机台架试验所用电拉系统,因此该仿真试验可以在实际发动机台架试验前对电控系统进行测试,可在试验中发现并解决出现的问题, 为实际台架试验做好准备,这是其它调试方法无法做到的.圉4ECU与HILSS的信号联接圉5试验2信号联接圉3结束语在汽车控制系统的开发过程中采用硬件在环仿真技术可以进行控制系统软硬件的测试,帮助设计者了解系统的动态特性,进行极端条件的测试并准确分析每一个参数独立变化对系统特性的影响,缩短了产品的开发周期,降低了开发费用.目前,我国已经开发出用于硬件在环仿真的高性能价格比的实时处理系.硬件在环仿真可以应用于科研与工程试验的各个方面,是传统工程试验方法的重大发展,必将在汽车控制系统的开发过程中得到广泛应用.参考文献lWrightC.D.AutomotiveApplicationofElecmmicsProc IEEEWorl~hoponAutmmotiveAp#icad~m0fElectronicsDeartxx~MichigmaPP.49—53October23—24.19862KelleyDsh~ffll'lonG.FAutomotiveElectronicsaI1dEn- gineMangagementsystem—AReviewlourr~0fElectrical andElectronicsEngineeringAustraliaV ot10No.4PP286—299,19903WoodB.JAppli~VerficadonaI1dValidationtoAutomo—tSoftwareDevelopmentSAEPaper90l72l4Sava~tioC.Hardware—in—LoopSmulatlon—AnEngine ControllerImplementationSAEPaper9302046HaraldKro}~nVictorGheot~iuHalxiWal"e—in一Sim—niatlonforanElectx~nicClutchManagementS~temSAE Papez9504207U.Vat&rainT.№gD.NeumannAnEngineSgT1a1 SimulatorMicroprocemlngandMicroprogrmmaivg28 (1989)I:'219—2228DddN1ⅡmnBc~mrdBkandJn—Uw~Varcim~in AnUniversalRealtimeSimulatorforEnginesMIX,l9949朱辉.柴油机电控单元硬件在环仿真系统研究.北京理工大学博士论文.1997l0朱辉等.高性能价格比的实时处理系统.计算机应用研究,1998(1)(责任编辑维云)修改稿收到日期为1998年8月2,5日.(上接第3页)c.小红旗是首家匹配安全气囊的国产轿车.匹配SRS-40系统以后,驾驶员头颈部伤害指标较不装气囊时有显着下降,完全实现了预期目标.1998年第l2期圉3参考文献lBergfrledDeta1.ElectronicCrashSenso~forRestraint System.Imper901136(责任编辑路』,1原稿收到日期为1998年6月2日.——9——。
Hil在汽车整车测试及开发系统中的应用打开文本图片集摘要:目前中国的汽车市场竞争愈演愈烈,人们在追求汽车高性能的同时对于汽车的测试要求也在不断的提高,因此不论对于汽车的生产厂商还是汽车维修行业,都需要一种更加方面快速的仿真测试方法,那就是硬件在环技术。
硬件在环仿真测试系统可以实时的模拟出驾驶员以及车辆的具体工作环境,大大降低了车辆测试的风险,缩短了开发的周期,有效的降低开发成本。
【关键词】:^p :Hil(硬件在环);汽车技术;ECU;仿真模型1 认识HILHiL(Hardware-in-the-Loop)硬件在环仿真测试系统是采用实时处理器(真实的控制器)运行仿真模型来模拟受控对象(比如:汽车、航空飞机等设备)的运行状态,通过I/O接口与被测的ECU连接,对被测系统进行全方面的、系统的测试[1]。
这种仿真是出于计算机离线仿真和实物台架测试之间的一种测试类型,它将实物硬件嵌入到仿真系统中的实时动态仿真技术。
从安全性、可行性和合理的成本上考虑,HiL硬件在环仿真测试已经成为ECU开发流程中非常重要的一环,这种技术无需真实车辆即可达到测试的目的,减少了实车路试的次数,大大降低了车辆测试的风险,缩短开发时间,有效降低成本,同时提高ECU的软件质量,降低汽车厂的风险。
目前,硬件在环测试系统以其专业性、实用性以及高效性被广泛适用于各项应用中。
2 Hil测试系统的基本架构2.1 HIL测试系统的基本结构HIL测试系统主要由三个基本部分组成,分别是实时处理器、I/O接口和可视化的操作界面,其中实时处理器是整个HIL测试系统的核心部分。
它的主要是精确地仿真测试系统中物理上并不存在的部分,即仿真出实际汽车驾驶及行驶过程中的可能出现的任何异常情况,同时对这些情况进行数据记录、硬件I/O通信并生成仿真模型并执行整个测试系统;I/O接口用于控制器与被测ECU之间的信息交互,它也可是用来产生某些产生激励信号,进行各种模拟信号、数字信号和总线信号的通信及数据传输。
汽车ESP硬件在环仿真试验台搭建毕业论文目录第1章绪论11.1选题意义与背景11.1.1汽车电子产品的开发方法与硬件在环仿真11.1.2车身电子控制与汽车主动安全的发展与研究21.1.3本文研究的主要容21.2硬件在环仿真基础理论21.2.1硬件在环仿真的概念31.2.2硬件在环仿真的开发背景与优点31.2.3硬件在环仿真的形式与组成部分31.3汽车防抱死制动系统(ABS)61.3.1 ABS的基本工作原理61.3.2 ABS硬件在环仿真的实现81.4汽车电子稳定性程序(ESP)81.4.1 ESP的基本工作原理81.4.2 ESP硬件在环仿真的实现方法101.5本文研究容14第2章试验台的硬件建设142.1 试验台硬件系统总体方案142.1.1 ABS/ ESP的比较142.2.2 ESP的硬件在环仿真实验台方案142.2 Dspace实时仿真系统152.3 液压控制单元172.4 制动系统与操纵系统182.5 传感器182.6 信号采集电路192.6.1 限幅电路202.6.2 滤波电路202.6.3 隔离电路212.6.4 信号采集电路212.7 实验台架222.8 其他硬件23第3章试验台的软件建设233.1 车身二自由度操纵稳定性数学模型243.2 车辆两轮三自由度直线行驶数学模型283.2.1 车身模型293.2.2 轮胎模型313.2.3 动力传动系模型323.2.4 车辆两轮三自由度数学模型353.3 车辆四轮七自由度数学模型353.3.1 车身模型363.3.2 轮胎模型443.3.3 动力传动系模型463.3.4 制动器模型483.3.5 车辆四轮七自由度数学模型49第4章仿真结果分析504.1 基于Matlab/Simulink的离线仿真504.1.1 模型参数设定504.1.2 油门控制车辆直线加减速工况仿真514.1.3 制动轮缸压力控制车辆直线加减速工况仿真55 4.1.4 转向角控制车辆稳态转向工况仿真564.2 基于Dspace的实时仿真614.2.1 Matlab/Simulink与Dspace的无缝连接614.2.2 无I/O接口的实时仿真624.2.3 有I/O接口的实时仿真654.2.4 仿真结果分析68第5章全文总结与工作展望68致谢69参考文献69附录71第1章绪论1.1选题意义与背景1.1.1汽车电子产品的开发方法与硬件在环仿真近年来,人们对提高汽车的动力性和经济性以与降低排放的呼声越来越强,同时对汽车的安全性和舒适性的要求也越来越高,这种趋势促进了汽车技术,尤其是汽车控制技术的发展。
矿产资源开发利用方案编写内容要求及审查大纲
矿产资源开发利用方案编写内容要求及《矿产资源开发利用方案》审查大纲一、概述
㈠矿区位置、隶属关系和企业性质。
如为改扩建矿山, 应说明矿山现状、
特点及存在的主要问题。
㈡编制依据
(1简述项目前期工作进展情况及与有关方面对项目的意向性协议情况。
(2 列出开发利用方案编制所依据的主要基础性资料的名称。
如经储量管理部门认定的矿区地质勘探报告、选矿试验报告、加工利用试验报告、工程地质初评资料、矿区水文资料和供水资料等。
对改、扩建矿山应有生产实际资料, 如矿山总平面现状图、矿床开拓系统图、采场现状图和主要采选设备清单等。
二、矿产品需求现状和预测
㈠该矿产在国内需求情况和市场供应情况
1、矿产品现状及加工利用趋向。
2、国内近、远期的需求量及主要销向预测。
㈡产品价格分析
1、国内矿产品价格现状。
2、矿产品价格稳定性及变化趋势。
三、矿产资源概况
㈠矿区总体概况
1、矿区总体规划情况。
2、矿区矿产资源概况。
3、该设计与矿区总体开发的关系。
㈡该设计项目的资源概况
1、矿床地质及构造特征。
2、矿床开采技术条件及水文地质条件。
硬件在环仿真在汽车控制系统开发中的应用及关键技术齐鲲鹏,隆武强,陈 雷(大连理工大学内燃机研究所,辽宁大连116024)摘要:介绍硬件在环仿真的概念、系统组成和工作过程以及在汽车控制系统开发中的应用实例,重点阐述了硬件在环仿真应用中的关键技术。
硬件在环仿真应用实例的结果表明,合理使用硬件在环仿真中的关键技术开发汽车控制系统,可以有效地缩短控制系统的开发周期,提高控制系统的设计水平,节约试验费用,为控制系统的开发提供了便利的条件。
关键词:硬件在环仿真;汽车控制系统;关键技术;有效性;实时性中图分类号:U461 文献标识码:B 文章编号:1000-6494(2006)05-0024-04Application of Hardware -in -the -loop Simulation in the Development ofControl System for Vehicle and Its Key TechnologiesQI Kun -peng ,LONG Wu -qiang ,C HE N Lei(Institute of I .C .Engine ,Dalian University of Technology ,Dalian 116024,China )A bstract :In this paper ,the concept ,s ystem composing and working process of Hard ware -in -the -loop Simulation are intro -duced ,the examples of Hard ware -in -the -loop Simulation application in the develop ment of Control System for Vehicle are also illustrated ,and the key technologies of Hard ware -in -the -loop Simulation application are put emphasis on to present .The facts indicate that it can effectively cut the development period of the control s ystem ,improve the design level of the control s ystem ,save the test expenditure and provide convenient condition to develop the control system through applying the key techn ologies of Hard -ware -in -the -loop Simulation to develop the control system for vehicle .Key words :hardware -in -the -loop simulation ;control system for vehicle ;key technology ;validity ;real -time performance 作者简介:齐鲲鹏(1976-),男,辽宁大连人,博士研究生,主要研究方向为内燃机电子控制。
收稿日期:2006-06-01 近年来,人们对提高汽车的动力性和经济性以及降低排放的呼声越来越强,同时对汽车的安全性和舒适性的要求也越来越高,这种趋势促进了汽车技术,尤其是汽车控制技术的发展。
汽车控制系统在提高汽车的动力性、经济性和降低排放以及改善汽车的安全性、舒适性等方面发挥了巨大的作用。
随着汽车控制系统的功能不断增加,汽车控制技术也变得越来越复杂,采用传统的工程试验方法对汽车控制系统进行开发的弊端也逐渐显露出来。
硬件在环仿真作为一种先进的仿真技术,它的出现改变了汽车控制系统的传统开发手段,通过硬件在环仿真系统模拟汽车的各种运行工况,可以对汽车控制系统的性能进行测试和评估,为汽车控制系统的开发提供了方便快捷的途径。
1 硬件在环仿真硬件在环仿真(Hardware -in -the -loop Simula -tion ,HILS )是指将部分实际被控对象或系统部件用高速运行的实时仿真模型来代替,而控制系统则用实物(即硬件)与系统实时仿真模型连接成为一个硬件在环仿真系统(HILSS ),通过仿真试验对控制系统的控制策略、控制功能及系统可靠性等进行测试和评估。
硬件在环仿真系统主要由三部分组成,包括系统实时仿真模型、高速接口模块和PC 机监控系统(如图1所示)。
系统实时仿真模型是整个硬件在环仿真系统的核心,其主要功能是实现系统模型的实时仿真计算;高速接口模块充分利用其高速计算能力,可以在系统实时仿真模型和控制系统实物之间进行各种信号的传递;PC 机监控系统作为人机交互平台,既可以方便地修改系统仿真模型的参数,又能及时地监控系统实时仿真模型在控制系统实物作用第5期2006年10月内燃机Internal Combustion Engines No .5Oct .2006图1 硬件在环仿真系统结构图下运行状态的变化情况。
硬件在环仿真系统的工作过程如下:首先系统实时仿真模型按照用户设定的初始参数运行,同时把仿真模型的计算结果通过高速接口模块送往控制系统实物,并在PC机监控系统中显示计算结果;控制系统实物根据接收到的系统实时仿真模型的计算结果,按照一定的控制策略计算出控制参数,然后将控制参数通过高速接口模块反馈给系统实时仿真模型,系统实时仿真模型根据控制参数改变其运行状态;用户可以根据需要在PC机监控系统的图形用户界面上改变仿真模型的系统参数,从而实现对系统状态的控制。
硬件在环仿真用于控制系统的开发,能够对控制系统的软硬件进行测试和评估,具有开发周期短、成本低和效率高等优点,所以在汽车、机械、航空航天和武器研制等研究领域中得到了广泛的应用。
2 硬件在环仿真在汽车控制系统开发中的应用 现阶段,硬件在环仿真已成为汽车控制系统的重要开发手段,为解决汽车控制系统的设计、试验、性能优化等各方面问题提供了一种崭新的仿真分析技术,同时也为汽车控制技术快速、经济、高效的发展提供了强大的支撑平台。
硬件在环仿真可以模拟现实中汽车的各种运行工况来替代工程试验工作,还可以对在工程试验中不可能出现的危险和极端工况提供模拟试验,因此在各种汽车控制系统的开发过程中,硬件在环仿真都得到了广泛的应用,取得了很好的使用效果。
下面介绍硬件在环仿真在汽车控制系统开发中的几个应用实例。
a.在汽车发动机电控单元(Electronic Control Unit,E CU)的开发中,通过建立发动机电控单元硬件在环仿真系统〔4〕,可以方便地对发动机电控单元进行功能调试,缩短了电控单元的开发周期,使发动机电控单元的开发和测试变得灵活而简单。
b.在汽车混合动力总成控制器(Powertrain Con-troller)的开发中,通过建立动力总成控制器硬件在环仿真系统〔5〕,可以方便快捷地建立动力总成控制器的模型,并对其进行参数优化匹配,是制定和优化动力总成系统控制策略的有效方法。
c.在汽车线控转向(Steer-By-Wire,SBW)系统的开发中,通过建立线控转向硬件在环仿真系统〔6〕,可以评估线控转向系统的控制算法和功能特性,并可在试验室中对线控转向系统中的自动防故障系统的动态特性进行测试研究,为线控转向系统的开发提供了方便和安全的手段。
d.在汽车防抱制动系统(Anti-lock Braking System,ABS)的开发中,通过建立防抱制动硬件在环仿真系统〔7〕,可以完成对防抱制动系统制动功能的试验验证,为防抱制动系统的测试提供良好的试验平台,大大减少了实车试验的次数,提高了系统的开发效率,降低了系统的开发费用。
e.在汽车牵引力控制系统(Traction Control System,TC S)的开发中,通过建立牵引力控制硬件在环仿真系统〔8〕,可以测试牵引力控制系统控制策略的有效性,完成牵引力控制系统软、硬件的性能匹配,从而实现快速、有效地开发牵引力控制系统。
f.在汽车电子稳定性程序(Electronic Stability Program,E SP)系统的开发中,通过建立电子稳定性程序硬件在环仿真系统〔9〕,可以对电子稳定性程序系统进行性能分析,测试电子稳定性程序系统控制策略的有效性,方便快捷地完成电子稳定性程序系统的开发。
硬件在环仿真在汽车控制系统开发中的应用,既解决了纯粹数字仿真对现实条件过于简化的问题,又克服了工程试验时间长和费用高的制约,所以它是一种切实可行的既缩短开发周期,又节约开发成本的汽车控制系统的开发方法。
3 硬件在环仿真应用中的关键技术笔者综合分析硬件在环仿真在汽车控制系统开发中的应用实例,得出以下结论,虽然每个硬件在环仿真系统的设计目的和开发用途各有不同,但是在系统的硬件构成技术和软件技术上却有着很多的相似特点,这些相似之处就是硬件在环仿真应用中的关键技术。
3.1 硬件构成技术硬件在环仿真系统中的硬件构成主要包括系统 第5期齐鲲鹏等:硬件在环仿真在汽车控制系统开发中的应用及关键技术·25 ·实时仿真模型的硬件载体,接口系统硬件和监控系统硬件,由于这些硬件系统的选择直接关系到硬件在环仿真系统的有效性和实时性,因此在硬件在环仿真应用中具有十分重要的意义。
系统实时仿真模型的功能是实时提供模拟真实系统运行状况的状态参数,以达到对控制系统的性能进行测试和评估的目的。
在仿真过程中,系统实时仿真模型的运算量非常大,因此对系统仿真模型的实时性要求非常严格,选用具有高速并行处理功能的数字信号处理(Digital Signal Processing,DSP)系统。
DSP系统是一种高速流水并行的专用性数字信号处理系统,它采用程序存储区及其总线与数据存储区及其总线相分开的哈佛结构,同时在硬件上设置了硬件乘法/累加器,可在单个指令周期内完成乘法/累加运算,而在软件方面增添了适应DSP数据结构的寻址指令和并行指令,这些特点都大大提高了DSP系统的运算速度,从而保证了系统仿真模型可以进行高速实时的数据运算处理。
接口系统的功能是在仿真模型和控制系统实物之间进行状态信号和控制信号的传递,这些信号包括各种模拟信号、数字信号和脉冲信号,因此接口系统的主要功能是进行A/D和D/A转换。
由于单片机具有可靠性好、易扩展、运行速度快等优点,因此选用单片机系统来构建整个硬件在环仿真系统的接口系统,可以获得良好的性价比。