基于 HiL 硬件在环系统的 ADAS 测试方案
- 格式:pdf
- 大小:2.94 MB
- 文档页数:19
ADAS开发及测试方案先进驾驶辅助系统(Advanced Driver Assistance Systems)简称ADAS,是利用安装于汽车上的各种传感器,及时采集车内外的环境数据,进行静动态物体的辨识、侦测与追踪等技术上的处理,从而能够让驾驶者在最快的时间察觉可能发生的危险,并采取必要的动作,从而更好地保护乘客的安全,保障车辆及周围交通环境的安全。
随着ADAS系统的引入,汽车变得越来越智能,也极大地提升了车辆驾驶的安全性,因此ADAS也成为整车厂新的竞争利器。
ADAS的组成非常广泛,包括了夜视系统、主动巡航控制系统(ACC)、电子稳定程序(ESP)、随动转向前照灯(AFS)、车道偏移报警(LDW)、防碰撞技术(FCW)、盲点检测技术(BSD)以及泊车辅助技术(PLA)等。
ADAS系统的开发具有特殊性,除了遵从一般ECU的V模式开发流程外,由于ADAS系统的实时性非常重要,需要实时与不同类型的传感器进行数据交换(比如摄像头、激光雷达、雷达、车辆CAN总线、GPS等),而且需要方便的集成新的功能和算法,因此,ADAS系统的软件开发需要解决很多挑战,比如多线程编程、数据样本时戳和再同步、数据延时测量和预估,系统优化和性能评估、代码重用和软件应用维护等。
Elektrobit公司(简称EB)是全球知名的汽车软件工具提供商,基于和Audi的合作开发经验推出了模块化的ADAS开发环境平台——EB Assist Automotive Data and Time—Triggered Framework (ADTF),可以帮助ADAS软件开发者快速地完成新功能的开发。
除相应的开发工具外,EB还提供标准化的ADAS系列算法模块,通过咨询服务帮助客户完成ADAS的开发。
北汇信息作为EB中国的合作伙伴,将一同助力中国汽车客户的ADAS开发效率的提升.EB Assist ADTF简介:ADAS 算法开发过程可以借助MATLAB/Simulink等建模软件或C语言等来完成,并导入到EB Assist ADTF中.EB Assist ADTF能够从不同的源获取并同步数据,包含不同类型的传感器数据并且同步和不同总线数据(LIN、MOST、CAN和FlexRay)的交互。
ADAS实验平台硬件在环仿真许广吉;石晶【摘要】高级辅助驾驶(Advanced Driver Assistant System,ADAS)可以在很大程度上降低交通事故,减少人员伤亡和不必要的经济损失.因此,各个汽车厂以及高校对ADAS进行研发.文章进行ADAS实验台进行搭建,并且能过实现MATLAB/Simulink、NI-Veristand和CarSim软件的联合仿真.【期刊名称】《汽车实用技术》【年(卷),期】2019(000)009【总页数】2页(P42-43)【关键词】ADAS实验平台;仿真【作者】许广吉;石晶【作者单位】辽宁工业大学汽车与交通工程学院,辽宁锦州 121000;辽宁工业大学汽车与交通工程学院,辽宁锦州 121000【正文语种】中文【中图分类】U467高级驾驶辅助系统(Advanced Driver Assistant System,ADAS),是基于安装在汽车上的各种传感器,在汽车行驶的过程中收集车内外的数据、辨识静态和动态物体,进行运算和分析并将相关信息反馈给驾驶者或进行相关的辅助决策,从而提高汽车行驶的安全性[1]。
ADAS技术被普遍认为是实现自动驾驶的过程性技术,其发展对于提高道路安全性以及实现未来智能驾驶是非常关键的一环[2]。
ADAS实验平台是由驾驶模拟器、主控PC(含实验管理系统)、RT系统和ADAS 快速原型控制器等组成,在主控PC与RT系统和ADAS快速原型控制器进行局域网进行通信。
本实验台采用的是美国国家仪器公司操作系统。
本实验台主要是以汽车动力学仿真软件CarSim为核心的仿真软件,在CarSimRT中进行整车模型、道路模型、场景设置、以及整车模型初始状态、仿真时间和相应的数据接口等仿真参数进行设置。
RT系统实时采集驾驶模拟器中的汽车动力学信号,例如制动、转向、加速和档位信号,并且在CarSim RT中设置的虚拟雷达和摄像头等设备信号通过CAN和LIN通信传递给ADAS快速原型控制器;在ADAS快速原型控制器中将所采集信号经过控制策略和算法将输出结果传递给驾驶模拟器的执行机构;在主控PC中能够实时显示汽车动力学信号、虚拟雷达和摄像头等信号,并且能够实时显示出CarSim的仿真场景界面(在驾驶模拟器的显示器中也能够显示CarSim的仿真场景界面)。
第1篇随着汽车行业的快速发展,汽车电子技术在汽车中的地位越来越重要。
汽车电子系统在提高汽车性能、安全性和舒适性方面发挥着关键作用。
然而,汽车电子系统的复杂性和可靠性要求也越来越高,因此,对汽车电子系统的测试显得尤为重要。
本文将针对汽车电子测试解决方案进行探讨。
一、汽车电子测试概述1. 汽车电子测试的重要性汽车电子系统由多个模块组成,这些模块之间相互关联,共同实现汽车的功能。
汽车电子系统的可靠性直接关系到汽车的安全性和性能。
因此,对汽车电子系统进行严格的测试是保证汽车质量的关键。
2. 汽车电子测试的类型汽车电子测试主要分为以下几个方面:(1)功能测试:验证汽车电子系统是否满足设计要求,包括功能、性能、接口等方面的测试。
(2)性能测试:测试汽车电子系统的性能指标,如响应时间、处理速度、功耗等。
(3)兼容性测试:测试汽车电子系统与其他系统、模块的兼容性。
(4)可靠性测试:评估汽车电子系统在长期使用过程中的稳定性和寿命。
(5)环境适应性测试:测试汽车电子系统在不同环境条件下的性能和可靠性。
二、汽车电子测试解决方案1. 测试平台搭建(1)硬件平台:搭建满足汽车电子测试需求的硬件平台,包括测试设备、测试台架、连接线等。
(2)软件平台:开发适用于汽车电子测试的软件平台,包括测试脚本、测试工具、数据分析等。
2. 测试方法(1)黑盒测试:通过输入测试数据,观察输出结果,验证汽车电子系统的功能是否满足设计要求。
(2)白盒测试:对汽车电子系统的代码进行审查,分析代码逻辑,找出潜在的错误和缺陷。
(3)灰盒测试:结合黑盒测试和白盒测试的优点,对汽车电子系统进行综合测试。
(4)模拟测试:通过模拟实际使用环境,对汽车电子系统进行测试。
(5)实际道路测试:在真实道路上对汽车电子系统进行测试,验证其在实际使用中的性能和可靠性。
3. 测试用例设计(1)功能测试用例:根据汽车电子系统的功能要求,设计测试用例,验证系统功能是否满足设计要求。
10.16638/ki.1671-7988.2021.05.040基于HIL的车载网关控制器的自动化测试研究巫辉燕,林汉雄(广州汽车集团股份有限公司汽车工程研究院,广东广州510640)摘要:车载网关控制器(简称GW)是汽车网络架构中重要的ECU控制单元,负责不同网络之间报文与信号的转换与路由处理。
因此,网关控制器的可靠性要求是非常高的。
文章对网关控制器测试验证进行了自动化测试研究,提出了两种实现网关自动化测试的方法,对网关控制器研发过程中的测试验证提供了极其重要的参考价值。
关键词:车载网关;HIL;自动化测试中图分类号:U467 文献标识码:A 文章编号:1671-7988(2021)05-140-03Research on Automation Test of Automotive Gateway Based on HILWu Huiyan, Lin Hanxiong( Guangzhou Automobile Group Co., Ltd., Automobile Engineering Institute, Guangdong Guangzhou 510640 )Abstract:Gateway(short for GW) is an important ECU in the automotive network architecture, it’s responsible for the conversion and routing of messages and signals between different networks. Therefore, the high reliability is required. In this paper, it makes research work on the automation test of GW and presents two methods to realize GW Automaton test which provides important reference value for the test verification in the development process of GW.Keywords: Automotive gateway; HIL; Automation TestCLC NO.: U467 Document Code: A Article ID: 1671-7988(2021)05-140-03前言网关控制器是汽车整车电子电气架构中的核心ECU,车载网关作为车载网络中信息交换的核心[1],整车信号传输的枢纽,其主要的功能有路由、网络管理、波特率转换以及诊断刷新等。
V2X-HIL测试方案目录1.系统架构 (3)1.1.系统架构 (3)1.2.功能架构 (3)2.子系统设计与说明 (4)2.1.C-V2X 仿真测试软件 (4)2.2.C-V2X 自动化测试管理系统 (12)2.3.C-V2X 应用场景测试过程演示系统 (23)2.4.C-V2X 场景基础库 (25)2.5.C-V2X 测试辅测机及测试软件 (33)2.6.GNSS模拟器 (35)2.7.HIL机柜及交换机 (38)1.系统架构1.1.系统架构整个系统测试由2大块组成,测试系统以及外围设备。
系统架构图如下图所示:V2X 综合测试仪:主要包括HIL场景测试系统以及协议一致性测试系统。
其中HIL场景测试系统可生成3D仿真场景,支持生成车辆模型、道路模型、导入路网等功能;自动化测试工具支持场景的管理的创建、测试用例的管理、测试用例执行和测试报告的生成等功能;协议一致性测试系统可对被测件执行网络层、消息层、安全层的协议一致性测试系统;外围设备管理,可管理机柜、C-V2X测试辅测机、GNSS 信号源等外围设备。
1.2.功能架构系统功能架构,如下图所示:2.子系统设计与说明2.1.C-V2X 仿真测试软件本项目采用VTD构建C-V2X仿真测试软件。
Virtual Test Drive (VTD)复杂交通环境视景建模、仿真软件由德国的 VIRES 公司开发,该公司成立于 1996 年,VIRES 的产品主要是针对交通领域实时视景系统的应用而开发,包括汽车、轨道交通及航空领域,其中汽车主动安全的复杂交通视景系统开发是 VIRES VTD 最重要的应用方向,并已在奥迪、宝马及奔驰应用在各自的驾驶模拟器的交通场景开发中。
VTD 提供了一套从道路设计到仿真框架的完整工具链,支持标准设计,使用开放标准(OpenDRIVE,OpenCRG etc.),支持实时仿真,如在 SIL/DIL/VIL/HIL 环境下评估高级驾驶员辅助系统(ADAS)、主动安全系统(active safety systems),内置多种传感器模型,能够为智能驾驶提供逼真的场景和传感器,主要针对复杂的实时交通环境实现视景仿真应用,在 Linux 系统中运行,高度模块化,是一款非常灵活的软件,支持视景实时渲染能力强,渲染稳定。
竭诚为您提供优质文档/双击可除adas解决方案篇一:adas开发及测试系统解决方案adas开发及测试系统解决方案高级驾驶员辅助系统(adas)作为实现车辆主动安全的关键系统,已经越来越多的配置到各种级别的乘用车和商用车上。
同时面对日益加强的法律法规,基于Fas-cam(前视主动安全摄像头)的adas解决方案将逐渐成为euro-ncap五星安全等级车辆的必须配置。
随着adas控制器功能的增加,控制系统硬件、图像处理、算法策略、与整车其他子系统的交互越来越复杂,这将给开发过程和测试过程带来前所未有的挑战。
在汽车hil系统领域,针对新兴的adas系统开发、测试的解决方案可以解决实车开发测试一致性差、效率低、周期长、成本昂贵、危险性高的弊端。
采用仿真技术的硬件在回路(hil)测试系统在adas系统开发、测试阶段可以很好的解决以下问题:摄像头功能调试;摄像头性能分析;摄像头标定;euroncap摸底测试;场地试验;控制策略验证;网络通讯测试;失效保护测试;hmi功能测试;无人车控制算法的开发与测试。
adas开发及测试系统组成:外围系统测试内容算法功能车道线偏离报警(ldw,lanedeparturewarning)前方碰撞预警(Fcw,Forwardcollisionwarning)前方碰撞预警(Fcw,Forwardcollisionwarning)智能大灯控制(ihc,intelligenceheadlampcontrol) 限速标志识别(tsR/sas,tra-csignRecognition,speedassistsystem) 自动紧急刹车(aeb/aebp,autonomousemergencybraking)自适应巡航(acc,adaptivecruisecontrol)自适应巡航(acc,adaptivecruisecontrol)系统功能针对euro-ncap的虚拟场地测试针对euro-ncap的虚拟场地测试失效保护测试系统网络性能测试解决方案服务内容:根据客户控制系统功能提供:系统测试解决方案搭建定制的hil测试系统提供完整的视频处理测试系统提供adas控制器快速原型系统用户控制器信号匹配(用户提供控制器)车辆动力学模型参数化can网络报文集成(用户提供dbc文件)hmidemo开发测试用例开发(基于euro-ncap不同星级标准)提供工况素材测试数据分析该方案的优势采用世界领先的mobileye单目视觉解决方案采用针对adas应用的世界领先的ipg车辆空力学模型采用先进的自动代码生成技术的快速控制原型系统可针对euro-ncap及其他标准进行评分测试可进行针对sop阶段的摄像头标定测试支持外部视频注入,可实现全工况模拟可进行hmi快速开发、测试、验证支持人在环测试篇二:adi高级驾驶员辅助系统(adas)视觉解决方案adi高级驾驶员辅助系统(adas)视觉解决方案来源:网络整理作者:maggie[导读]高级驾驶员辅助系统(adas)在未来几年将出现大幅增长。
ADAS测试方案1. 引言自动驾驶辅助系统(ADAS)是一种基于车载传感器和计算机视觉技术的车辆辅助系统,可为驾驶员提供诸如自动刹车、智能巡航控制、车道保持辅助等功能。
为了确保ADAS的稳定性和性能,开发者需要设计一种有效的测试方案。
本文将介绍一个基本的ADAS测试方案,包括测试目标、测试环境、测试方法和测试评估指标等内容。
2. 测试目标ADAS测试的主要目标是验证系统的功能和性能。
具体目标包括: - 验证自动刹车功能是否可靠且符合安全要求 - 验证智能巡航控制功能是否准确地跟随车辆前方交通 - 验证车道保持辅助功能是否可以准确地识别和跟踪车道线 - 验证系统的灵敏度和响应时间是否符合要求3. 测试环境ADAS测试需要在真实道路上进行,以模拟真实驾驶场景。
测试环境应包括以下方面: - 道路条件:包括直线道路、弯道、上坡、下坡等多种道路类型 - 交通环境:包括其他车辆、行人、交通信号灯等 - 天气条件:包括晴天、雨天、夜晚等多种天气条件 - 驾驶场景:包括高速公路、城市道路、乡村道路等不同场景4. 测试方法4.1 功能测试功能测试是验证ADAS系统各项功能是否正常工作的基本测试。
测试方法包括以下步骤: 1. 自动刹车功能测试:在不同速度和距离下,模拟前方障碍物来测试自动刹车功能的触发和准确性。
2. 智能巡航控制功能测试:设定目标速度并在车辆前方引入不同速度的前车来测试系统的跟随和加减速控制功能。
3. 车道保持辅助功能测试:在不同的车道宽度和路况下,测试系统对车道线的识别和跟踪能力。
4. 紧急和危险情况测试:模拟紧急情况,如突然刹车或变道,测试系统的响应时间和动作准确性。
4.2 性能测试性能测试是验证ADAS系统的性能指标的测试。
测试方法包括以下步骤: 1. 系统响应时间测试:测试系统从检测到交通障碍物到触发相应功能所需的时间。
2. 跟随准确性测试:测试系统在各种速度下对前车的跟随精度和稳定性。
高级驾驶辅助系统前视摄像头硬件在环测试郭剑鹰;陈晓;高升【摘要】高级驾驶辅助系统可以大幅度降低交通事故,减少人员伤亡和经济损失,摄像头是该系统中的重要部件.为了在前视摄像头开发期间更早发现存在的问题,模拟路试过程中的危险工况,提出了一种基于CarMaker和VeriStand的硬件在环测试系统.应用所搭建的台架进行了大量摄像头的硬件在环功能测试,台架测试结果与实车测试结果一致,在车道偏离预警和前方碰撞预警典型工况下均能及时产生报警信号.【期刊名称】《光学仪器》【年(卷),期】2018(040)003【总页数】6页(P22-27)【关键词】高级驾驶辅助系统;前视摄像头;硬件在环【作者】郭剑鹰;陈晓;高升【作者单位】华域汽车系统股份有限公司,上海200433;华域汽车系统股份有限公司,上海200433;华域汽车系统股份有限公司,上海200433【正文语种】中文【中图分类】U467.5Abstract: Advanced driver assistance system(ADAS) can significantly reduce traffic accident rate,the number of casualties and economiclosses.The camera is an important part of ADAS.In order to find out problems earlier during the development of the front-view-camera and simulate dangerous conditions during the road test,a hardware-in-the-loop test system based on CarMaker and VeriStand was proposed.A large amount of hardware-in-the-loop function tests were carried out with the built platform.In typical conditions of lane departure warning and front collision warning,alarm signals can be generated in time,which is consistent with actual vehicle test results.Keywords: advanced driver assistance system; front-view-camera; hardware-in-the-loop test引言高级驾驶辅助系统(advanced driver assistance system,ADAS)可以大幅度降低交通事故,减少人员伤亡和经济损失。
硬件在环仿真(HIL):NI领先汽车测试关键之匙美国国家仪器有限公司(National Instruments, 简称NI)于日前参加了在上海光大会展中心举办的2015年汽车测试及质量监控博览会。
在此次博览会上,NI联合多家业内合作伙伴,集中展示了NI为汽车行业提供的灵活开放式的测试平台与多样化的解决方案。
2015年是汽车测试及质量监控博览会举办的第十个年头,它已确立为向中国汽车工业展示确保质量、可靠性、耐久性和安全性的各种技术与服务的行业内头号展会。
会上逾280家公司展示了自己的新产品,具体领域包括:发动机/排气测试;车辆动力学测试;材料测试以及碰撞测试等。
NI也借助此次盛会向企业及大众展示了NI 在汽车行业的技术优势与优质解决方案。
据了解,现今几乎所有的汽车OEM与一级供应商在各类测试应用中均有使用或集成了NI产品。
通过为控制、设计和测试提供通用平台,NI 帮助用户节省了在汽车研发到生产各个阶段耗费的成本和时间。
凭借业内领先的I/O、灵活现成的硬件、强大高效的LabVIEW开发环境,用户可以创建适合各种应用的解决方案。
目前NI的产品在汽车行业涉及了车载测试和数据记录、硬件在环仿真、台架测试与控制、快速控制原型、生产线测试、车载信息娱乐系统测试等几大应用。
此次博览会上,NI着重展示了其业内权威的硬件在环仿真(HIL)技术方面的应用。
NI通过其创新的低成本模块化硬件和软件平台帮助工程师和科学家设计并建立自己的HIL系统。
硬件在环HIL仿真技术可以使用NI PXI实时控制器运行仿真模型来模拟受控对象的运行状态,配合NI FPGA模块可适应更高动态特性及更高精度的模型应用需求。
NI硬件在环测试平台具有开放的软硬件技术架构,可以减少工程师的开发时间、成本和风险。
在支持第三方硬件和软件建模工具的同时,NI还提供一系列高性能模拟和数字I/O设备,CAN、LIN和FlexRay总线接口,故障注入硬件等硬件,让客户可以高效实现应用。
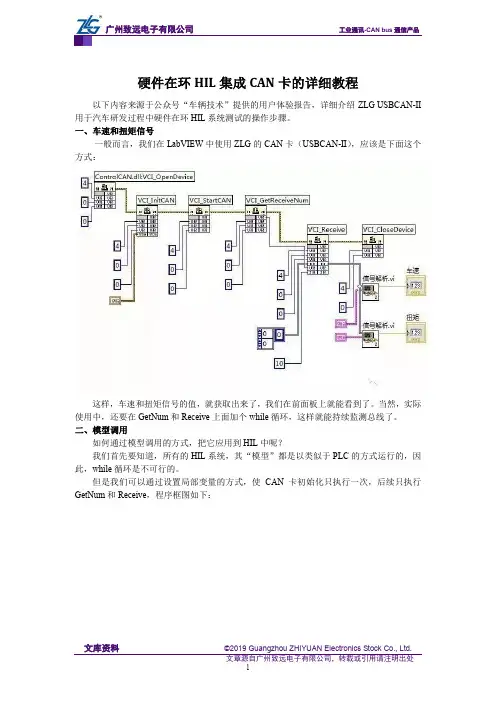
硬件在环HIL集成CAN卡的详细教程以下内容来源于公众号“车辆技术”提供的用户体验报告,详细介绍ZLG USBCAN-II 用于汽车研发过程中硬件在环HIL系统测试的操作步骤。
一、车速和扭矩信号一般而言,我们在LabVIEW中使用ZLG的CAN卡(USBCAN-II),应该是下面这个方式:这样,车速和扭矩信号的值,就获取出来了,我们在前面板上就能看到了。
当然,实际使用中,还要在GetNum和Receive上面加个while循环,这样就能持续监测总线了。
二、模型调用如何通过模型调用的方式,把它应用到HIL中呢?我们首先要知道,所有的HIL系统,其“模型”都是以类似于PLC的方式运行的,因此,while循环是不可行的。
但是我们可以通过设置局部变量的方式,使CAN卡初始化只执行一次,后续只执行GetNum和Receive,程序框图如下:当这个“模型”第一遍运行的时候,布尔的值默认为假,初始化部分执行,读取部分不执行,初始化成功之后,布尔值即变成真。
“模型”第二次及以后运行的时候,初始化部分即不再运行,只运行后续的读取信号部分。
接下来,我们把这个VI编译成“模型”。
我们先把“车速”、“扭矩”这两个控件连到接线端,然后通过genetrate model选项,生成“模型”,如下图:之后在弹出的对话框中点“generate”,几秒钟之后就会显示生成成功了。
随后,我们打开Veristand,添加上这个“lvmodel”,就能看到HIL系统中的“车速”和“扭矩”这两个输出变量了,如下图所示:然后,把这两个变量关联到HIL面板上,就可以使用了,RUN一下HIL工程,就可以观察到CAN信号的持续变化了。
接下来,是做人工测试还是做自动化测试,都是很方便的。
上面的例子只说了读取,对于写入而言,如果您需要往总线上发送CAN信号,只要您会用LabVIEW发报文,也是很容易集成到HIL中的,方法类似,就不重复演示了。
三、应用场合在某些应用场合,您可以用这种方式来在HIL中集成ZLG的CAN卡,ZLG的CAN卡相比NI原厂CAN卡,比较常见并且便宜不少,值得尝试。
车辆工程技术64车辆技术 汽车行业不断提升了电气化和智能化水平,也逐渐丰富了汽车的功能,不断增加电控单元,导致车辆电子电气系统变得更加复杂,因此增加了潜在安全隐患,因此企业也更加重视基于功能安全的开发理念,开始注重开发利用各种电控单元。
再加上当前能源问题越来越严峻,也因此推动了新能源汽车的发展。
整车控制器负责协调汽车的运行过程,因此属于汽车的核心零部件,我国整车企业需要合理开发整车控制技术。
硬件在环测试是整车开发流程中的重要环节,并且在各种ECU开发工作中广泛推广利用,在整车控制器量产前需要开展硬件再还测试。
在电动汽车中,整车控制器发挥着重要的作用,可以保障汽车的安全性,在整车控制器开发阶段需要保障功能安全性。
当前我国很多厂商已经可以生产出符合标准的产品。
本文分析了硬件在环的整车控制器功能安全测试技术,通过整车控制器研究硬件再换测试方法。
1 概述功能安全标准ISO26262 电气系统功能安全基本标准为ISO26262,主要是针对道路车辆功能安全制定的标准,可以在汽车整个生命周期中利用。
我国在2018年发布第二版ISO26262标准,扩宽了车辆适用范围,并且在ISO26262标准中增加了半导体功能安全应用方针。
ISO26262中提出功能安全管理体系,以此作为安全生命周期[1]。
开发电控单元的过程中,需要开发安全生命周期。
在开发初期,需要分析和评估目标系统的危险和风险(HARA),因此明确汽车安全完整性等级(ASIL),根据安全完整性等级设定安全目标。
确定汽车安全完整性等级,需要综合考虑严重度和暴露率以及可控性三个要素。
在产品开发过程中,ISO26262标注也提出了严格规定要求,并且针对不同级别的测试方法提出了针对性的参考。
本文主要验证研究VCU软件功能,开展软件集成测试,无需深入分析其他级别测试,ISO26262标准对于软件集成测试提出了具体的要求。
根据下图可以明确,针对HIL测试环境,强烈推荐ASIL C和ASIL D等级安全目标的测试,建议使用ASIL C和ASIL D。
⼲货ADASHIL仿真测试解决⽅案⾼级驾驶员辅助系统,简称ADAS 系统,该系统利⽤在汽车上安装的摄像头、雷达等传感器,基于图像识别、雷达探测等技术,实现快速识别汽车周围交通环境的⽬的,再通过控制车辆的动⼒、制动与转向系统进⾏控制或者预警。
这些功能可以减缓司机的驾驶疲劳度,也可以规避司机在某些驾驶过程中的不良驾驶⾏为。
恒润科技作为业内领先的HIL 测试系统供应商,对ADAS HIL 测试系统积累了丰富的开发经验与测试经验,可以为⽤户提供优质与完善的解决⽅案与⼯程服务。
⽬前,ADAS HIL 测试系统已被不少的国内知名整车⼚所采购,⽤于验证ADAS 电控系统的功能,该系统对于ADAS 电控系统开发、测试发挥着举⾜轻重的作⽤。
应⽤领域ADAS HIL 测试系统典型应⽤领域如下:ADAS 系统控制策略开发/研究基于雷达 /摄像头的 ADAS 算法开发ACC,AEB,LDW,FCW,LKA等功能开发⽆⼈驾驶策略研究ADAS 电控系统标定与调试基于不同车型的ADAS 传感器标定ADAS 功能验证ADAS 电控系统 HIL 测试ADAS 功能测试Euro-NCAP的虚拟场地测试误检测和漏检测的虚拟路试失效保护测试系统⽹络性能测试系统特点复杂的商业化车辆动⼒学模型可配置丰富的车辆参数可配置丰富的交通场景与试验⼯况功能强⼤的 3D 场景动画国际标准的 ADAS 测试场景库⾃动化测试系统扩展性强提⾼开发效率节约测试成本⼯程服务恒润科技针对不同的客户需求提供的⼯程服务包括:HIL 测试系统定制测试机柜定制开发测试软件⼯程配置系统调试与测试ADAS 解决⽅案定制视频仿真⿊箱设计视频注⼊⽅案定制毫⽶波雷达模拟器设计超声波雷达信号模拟其他传感器输⼊接⼝定制模型定制与闭环调试及测试服务车辆模型参数化传感器模型参数化道路模型搭建驾驶员模型配置⽤户控制器信号匹配CAN⽹络报⽂集成针对 Euro-NCAP及 ISO 标准的交通场景搭建测试需求分析及解决⽅案定制测试⽤例开发⾃动化测试脚本开发执⾏测试数据分析技术优势代理 IPG/VIRES/TESIS 等多款国际先进的车辆动⼒学及交通场景仿真的商业模型及软件提供基于毫⽶波雷达 / 超声波雷达 / 单⽬摄像头 / 多⽬摄像头/ 环视摄像头等多种传感器仿真的解决⽅案可提供基于国际标准进⾏⾃动化评分测试的服务可进⾏针对 SOP 阶段的摄像头标定测试可以与驾驶员模拟器结合进⾏驾驶员测试以及主观评价恒润科技作为本⼟领先的汽车电⼦供应商,拥有⼀⽀庞⼤的经验丰富、技术专业的咨询团队,累计为国内200多家客户提供了专业的技术咨询服务,受到了客户们的⼴泛认可。
Hil在汽车整车测试及开发系统中的应用打开文本图片集摘要:目前中国的汽车市场竞争愈演愈烈,人们在追求汽车高性能的同时对于汽车的测试要求也在不断的提高,因此不论对于汽车的生产厂商还是汽车维修行业,都需要一种更加方面快速的仿真测试方法,那就是硬件在环技术。
硬件在环仿真测试系统可以实时的模拟出驾驶员以及车辆的具体工作环境,大大降低了车辆测试的风险,缩短了开发的周期,有效的降低开发成本。
【关键词】:^p :Hil(硬件在环);汽车技术;ECU;仿真模型1 认识HILHiL(Hardware-in-the-Loop)硬件在环仿真测试系统是采用实时处理器(真实的控制器)运行仿真模型来模拟受控对象(比如:汽车、航空飞机等设备)的运行状态,通过I/O接口与被测的ECU连接,对被测系统进行全方面的、系统的测试[1]。
这种仿真是出于计算机离线仿真和实物台架测试之间的一种测试类型,它将实物硬件嵌入到仿真系统中的实时动态仿真技术。
从安全性、可行性和合理的成本上考虑,HiL硬件在环仿真测试已经成为ECU开发流程中非常重要的一环,这种技术无需真实车辆即可达到测试的目的,减少了实车路试的次数,大大降低了车辆测试的风险,缩短开发时间,有效降低成本,同时提高ECU的软件质量,降低汽车厂的风险。
目前,硬件在环测试系统以其专业性、实用性以及高效性被广泛适用于各项应用中。
2 Hil测试系统的基本架构2.1 HIL测试系统的基本结构HIL测试系统主要由三个基本部分组成,分别是实时处理器、I/O接口和可视化的操作界面,其中实时处理器是整个HIL测试系统的核心部分。
它的主要是精确地仿真测试系统中物理上并不存在的部分,即仿真出实际汽车驾驶及行驶过程中的可能出现的任何异常情况,同时对这些情况进行数据记录、硬件I/O通信并生成仿真模型并执行整个测试系统;I/O接口用于控制器与被测ECU之间的信息交互,它也可是用来产生某些产生激励信号,进行各种模拟信号、数字信号和总线信号的通信及数据传输。
hil测试用例设计方法HIL测试用例设计方法简介HIL(硬件在环)测试是一种将实际控制器与模型仿真相结合的测试方法,用于验证嵌入式系统的功能和性能。
正确设计的HIL测试用例是保证测试有效性和高效性的关键。
在设计HIL测试用例时,需要考虑以下几个步骤:1. 确定测试目标和测试需求:明确测试的目的和要达到的结果,例如测试控制器的输入输出响应、系统的稳定性等。
根据需求,确定关键参数和边界条件。
2. 识别测试对象和测试环境:确定被测试控制器的接口和输入/输出信号,利用仿真模型或实际硬件搭建测试环境。
测试环境应尽可能接近实际工作环境,以保证测试的真实性和可靠性。
3. 制定测试策略:根据测试目标和测试需求,制定合适的测试策略。
常用的策略包括功能测试、性能测试、边界测试等。
同时要考虑到测试的时序和并发性,以减少测试时间并提高效率。
4. 设计测试用例:根据测试策略和需求,设计具体的测试用例。
测试用例应包含测试输入、预期输出和执行步骤等信息,以确保测试的一致性和可重复性。
5. 验证测试用例的有效性:利用仿真工具或实际硬件对设计的测试用例进行验证。
通过模拟或实际执行测试用例,检查输出是否符合预期,并根据需要进行参数调整和优化。
6. 执行HIL测试:将设计好的测试用例应用于HIL测试系统,进行自动或手动测试。
在测试过程中,记录测试结果、异常情况和其他关键信息,以便后续分析和修复。
7. 分析和评估测试结果:对测试结果进行分析和评估,比较实际输出与预期输出的差异。
根据分析结果,确定问题的原因和解决方案,并进行必要的修复和优化。
8. 正式发布测试报告:根据测试结果和分析,撰写详细的测试报告。
报告中应包含测试目标、测试方法、测试结果和分析、问题和建议等内容,为后续工作提供参考。
通过以上HIL测试用例设计方法,可以有效保证测试的准确性和可靠性,提高产品的质量和稳定性。
同时,持续改进测试用例设计方法也是提高测试效率和降低成本的重要手段。
矿产资源开发利用方案编写内容要求及审查大纲
矿产资源开发利用方案编写内容要求及《矿产资源开发利用方案》审查大纲一、概述
㈠矿区位置、隶属关系和企业性质。
如为改扩建矿山, 应说明矿山现状、
特点及存在的主要问题。
㈡编制依据
(1简述项目前期工作进展情况及与有关方面对项目的意向性协议情况。
(2 列出开发利用方案编制所依据的主要基础性资料的名称。
如经储量管理部门认定的矿区地质勘探报告、选矿试验报告、加工利用试验报告、工程地质初评资料、矿区水文资料和供水资料等。
对改、扩建矿山应有生产实际资料, 如矿山总平面现状图、矿床开拓系统图、采场现状图和主要采选设备清单等。
二、矿产品需求现状和预测
㈠该矿产在国内需求情况和市场供应情况
1、矿产品现状及加工利用趋向。
2、国内近、远期的需求量及主要销向预测。
㈡产品价格分析
1、国内矿产品价格现状。
2、矿产品价格稳定性及变化趋势。
三、矿产资源概况
㈠矿区总体概况
1、矿区总体规划情况。
2、矿区矿产资源概况。
3、该设计与矿区总体开发的关系。
㈡该设计项目的资源概况
1、矿床地质及构造特征。
2、矿床开采技术条件及水文地质条件。