仿生机器人技术简介文稿演示
- 格式:ppt
- 大小:3.51 MB
- 文档页数:25

仿生制造技术之仿生机器人1、仿生机器人产生的背景早在地球上出现人类之前,各种生物已在大自然中生活了亿万年,在它们为生存而斗争的长期进化中,获得了与大自然相适应的能力。
生物学的研究可以说明,生物在进化过程中形成的极其精确和完善的机制,使它们具备了适应内外环境变化的能力。
生物界具有许多卓有成效的本领。
如体内的生物合成、能量转换、信息的接受和传递、对外界的识别、导航、定向计算和综合等,显示出许多机器所不可比拟的优越之处。
生物的小巧、灵敏、快速、高效、可靠和抗干扰性实在令人惊叹不已。
仿生制造也正是结合生物的特性所进行制造和研究的一门科学。
与此同时,随着机器人技术的发展,仿生机器人也由此应运而生。
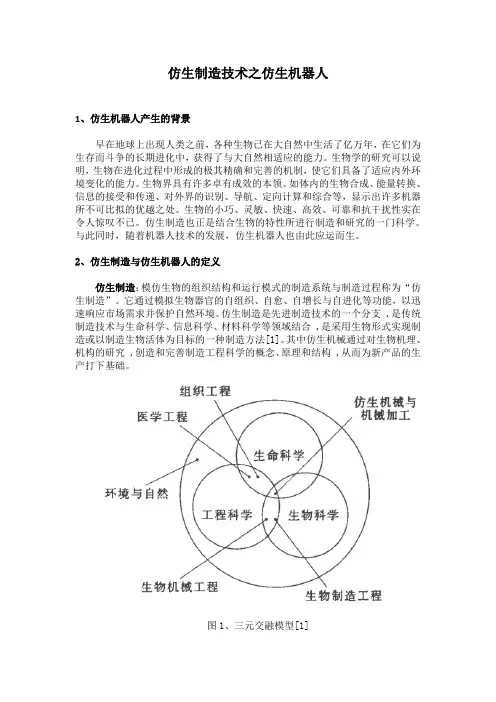
2、仿生制造与仿生机器人的定义仿生制造:模仿生物的组织结构和运行模式的制造系统与制造过程称为“仿生制造”。
它通过模拟生物器官的自组织、自愈、自增长与自进化等功能,以迅速响应市场需求并保护自然环境。
仿生制造是先进制造技术的一个分支 ,是传统制造技术与生命科学、信息科学、材料科学等领域结合 ,是采用生物形式实现制造或以制造生物活体为目标的一种制造方法[1]。
其中仿生机械通过对生物机理、机构的研究 ,创造和完善制造工程科学的概念、原理和结构 ,从而为新产品的生产打下基础。
图1、三元交融模型[1]图2、仿生制造的研究内容及方法[1]仿生机器人:包括仿人的和仿生物的机器人两类。
前者模仿人的肌体构造或器官功能,如仿人手、手臂、类人机器人等。
后者模仿各种生物如蚂蚁、象鼻、螃蟹等的功能。
医用微型机器人更需要仿生学的支持。
机器人在人体腔内移动的机理,极可能来自某些生物运动如蜗牛爬行的启发;另外必须弄清与人体腔相关的软组织生物力学,如规律性舒张收缩等因素对微移动机器人的影响。
其中仿生机器人研究的比较多的还是四足仿生机器人,获得的成果有提出了一种基于姿态传感器信息的平衡控制方法通过使用三轴加速度传感器的反馈控制来稳定行走[2];而仿人机器人技术的一大挑战是赋予智能体自主和自适应的能力,目前做的比较好的是将基于小脑的控制系统嵌入到能够处理动态外部和内部复杂性的仿人机器人中[3]。
仿生机器人概述范文仿生机器人是一种模仿生物形态、结构、功能和行为的机器人,旨在实现与真实生物相似或接近的外观、运动和行为能力。
仿生机器人结合了生物学、工程学和计算机科学等多个学科的知识,具有广泛的应用前景,在机器人技术领域引起了广泛的关注和研究。
近年来,仿生机器人技术取得了许多突破,研究人员通过模仿生物的外形和运动方式,设计出了具有更加自然、灵活和逼真动作的机器人。
仿生机器人不仅在外观上与生物相似,在功能上也越来越接近生物。
比如,一些仿生机器人可以像人类一样行走、摔倒后自己爬起来,还可以在复杂环境中进行感知、决策和控制,具备一定的智能。
仿生机器人的研究领域非常广泛,涉及机械设计、电子技术、材料科学、传感器技术、控制理论等众多学科。
研究人员们试图通过对生物形态、结构和运动机制的研究,将其应用于机器人设计中,以实现更高的性能和灵活性。
目前已经出现了一些具有生物形态的仿生机器人,比如仿鸟类的机器人,可以像鸟儿一样在空中飞行。
还有仿鱼类的机器人,可以在水中自如游动。
仿生机器人在军事、医疗、救援、娱乐等领域有着广泛的应用前景。
在军事领域,仿生机器人可以用于侦察、侦测敌情、辅助作战等任务,具有高度机动性和适应性。
在医疗领域,仿生机器人可以用于手术机器人,提高手术准确性和安全性,减少手术风险。
在救援领域,仿生机器人可以用于搜救、救援被困人员,具有适应复杂环境和高强度工作的能力。
在娱乐领域,仿生机器人可以用于制作电影特效、展览等,给人们带来更加逼真的视觉和体验。
尽管仿生机器人的研究和应用领域仍然面临许多挑战,比如传感器技术的改进、能源供给的改进、控制策略的改进等,但其前景依然十分广阔。
随着科技的不断进步,我们越来越接近创造出与生物相似、能够在各种环境中执行各种任务的仿生机器人。
这将会对我们的生活和社会产生深远的影响,推动科技的发展和人类文明的进步。