ICC错误集锦
- 格式:doc
- 大小:117.50 KB
- 文档页数:29

ICEM画⽹格常见出错及处理(1)ICEM常见⽹格出错及处理(1)关联(projection)错误净⽔泥盆1、错误描述⽹格错乱,⽹格与⼏何体形状不贴合,⽹格扭曲及极度扭曲(哦,哦,看着很恐怖!)2、诊断这种情况多数是由于⽹格关联错误导致,⽽且出现这种错误是⼩case,很好解决的哦,下⾯详细说说可能出错的⼏种情况。
3、解决办法下⾯针对具体的情况讲⼀讲解决办法。
(1)⼏何形状⽐较复杂如下图⼀段弯管:我们开始兢兢业业的建⽴block:好⾟苦,好⾟苦,看⼀看⽹格效果吧(本⽂暂不考虑O⽹格呢)哎呀,妈呀,⽹格这啥也不是啊,怎么啦,到底哪⾥出错了,抓狂啊。
别着急,耐⼼找原因勾选edge/show association 然后右图就看到了edge的关联错了。
可是为啥会关联错误呢,因为虽然ICEM有很好的⼏何⾃动捕捉能⼒,但是由于⼏何过于复杂,导致ICEM的⾃动关联发⽣错误。
怎么解决呢?(1)把⾓点、或线edge拉⼀拉,使之更贴合⼏何体;(2)有时需要把block再砍⼏⼑,这样就和⼏何体更贴合;(3)强制关联⾓点、edge或face。
对于例⼦中的问题,我就⼜把弯头砍了⼀⼑,把⾓点拉了拉,就解决了,如下图。
(2)使⽤旧的block有时我们更新了⼏何体,但仍在旧的block 基础上做⽹格(这也是ICEM 的⼀⼤优势啊,可惜有时⼀上来⽹格乱七⼋糟)。
这时旧的block 还是记住了和旧的⼏何体的关联,当导⼊新的⼏何体时,就会容易出现关联错误。
怎么解决呢,勾选edge/show association 然后右图就看到了关联错误的edge。
然后重新关联就好了。
(⼿上暂时没有案例,以后有机会补上)。
(3)⼀个edge跨两条line,⼀个face跨两个surface,⼀个block跨两个part有时出错是由于上⾯的原因导致的,怎么办呢,⼿起⼑落,⼀⼑砍下去,谁的归谁就好了。
⼩结。
欢迎交流哦!。

pix飞控地面站常见故障报错解锁故障提示:safe switch:安全开关未关闭,长按至灯长亮RC not calibrated :遥控器没有校准inconsistent compass… :加速度计重新校准(校准时箭头需始终对着一个方向)Baro not healthy:气压计不健康Alt disparity:气压计与惯性导航系统的高度不一致超过2米以上,这一消息通常是短暂的,当飞行控制器首次插入或如果它接收到一个硬的颠簸发生,如果没有消失,加速度计或许需要校准,或者气压计有故障Compass not healthy : 罗盘不健康,重新校准罗盘Compass not calibrated : 罗盘没有校准Compass offsets too high : 罗盘偏移值太大,也许是附近有金属或者其他干扰Check mag field:所感测的磁场在该区域中的磁场是35%高于或低于预期值,需要重新校准罗盘Compasses inconsistent : 内部和外部的罗盘指向不同的方向(从大于45度),通常是GPS外置罗盘放置位置不一致GPS Glitch : GPS故障,当选择的飞行模式需要GPS定位,或者开启地理围栏,此时GPS没有定位会有此提示Need 3D Fix :检查地理围栏是否关闭,(若无法解决,请重刷固件)Bad Velocity :检查飞行模式是否为自稳,检查地理围栏是否关闭High GPS HDOP : 检查飞行模式是否为自稳,检查地理围栏是否关闭INS not calibrated: 加速度计没有校准Accels not healthy:加速度计不健康,可能硬件问题,可能发生在刷新固件没有重启Accels inconsistent: 加速度计不一致超过1m/s/s ,重新校准加速度计Gyros not healthy: 陀螺不正常,可能硬件问题,可能发生在刷新固件没有重启Gyro cal failed:陀螺仪校准未能捕捉偏移,这个由于启动校准时候移动了飞控,在红蓝闪烁就是校准时刻 :陀螺不一致超过20deg/sec Check Board Voltage:检查板上电压,应该在4.3V到5.8V之间,如果通过USB供电,请尝试更换端口或者线缆Ch7&Ch8 Opt cannot be same:7/8通道不能设置一致Check FS_THR_VALUE:3通道最低值太接近失控保护值Check ANGLE_MAX: 控制飞控的最大倾斜角度设定在10度以下的angle_max参数(即1000)或80度以上(即8000)。

gcc编译错误表-备查conversion from %s to %s not supported by iconv”iconv 不支持从 %s 到 %s 的转换”iconv_open”iconv_open”no iconv implementation, cannot convert from %s to %s”没有 iconv 的实现,无法从 %s 转换到%s”character 0x%lx is not in the basic source character set\n”字符 0x%lx 不在基本源字符集中\n”converting to execution character set”转换到可执行文件的字符集”character 0x%lx is not unibyte in execution character set”字符 0x%lx 在执行字符集中不是单字节的”Character %x might not be NFKC”字符 %x 可能不是NFKC”universal character names are only valid in C++ and C99″Unicode 字符名只在 C++ 和 C99 中有效”the meaning of ‘\\%c’ is different in traditional C”‘\\%c’的意义与在传统 C 中不同”In _cpp_valid_ucn but not a UCN”在 _cpp_valid_ucn 中但不是一个UCN”inc omplete universal character name %.*s”不完全的 Unicode 字符名%.*s”%.*s is not a valid universal character”%.*s 不是一个有效的 Unicode 字符”‘$’ in identifier or number”‘$’出现在标识符或数字中”universal character %.*s is not valid in an identifier”Unicode 字符 %.*s 在标识符中无效”universal character %.*s is not valid at the start of an identifier”Unicode 字符 %.*s 在标识符开头无效”converting UCN to source character set”将 UCN 转换到源字符集”converting UCN to execution character set”将 UCN 转换到执行字符集”the meaning of ‘\\x’ is different in traditional C”‘\\x’的意义与在传统 C 中不同”\\x used with no following hex digits”\\x 后没有 16 进制数字”hex escape sequence out of range”16 进制转义序列越界”octal escape sequence out of range”8 进制转义序列越界”the meaning of ‘\\a’ is different in traditional C”‘\\a’的意义与在传统 C 中不同”non-ISO-standard escape sequence, ‘\\%c’”非 ISO 标准的转义序列,‘\\%c’”unknown escape sequence: ‘\\%c’”未知的转义序列:‘\\%c’”unknown escape sequence: ‘\\%s’”未知的转义序列:‘\\%s’”converting escape sequence to execution character set”将转义序列转换到执行字符集”character constant too long for its type”字符常量大小超出其类型”multi-character character constant”多字节字符常量”empty character constant”空的字符常量”failure to convert %s to %s”无法从 %s 转换到%s”extra tokens at end of #%s directive”#%s 指示的末尾有多余的标识符”#%s is a GCC extension”#%s 是一个 GCC 扩展”#%s is a deprecated GCC extension”#%s 是一个已过时的 GCC 扩展”suggest not using #elif in traditional C”建议在传统 C 中不使用#elif”traditional C ignores #%s with the # indented”当 # 有缩进时传统 C 忽略#%s”suggest hiding #%s from traditional C with an indented #”建议使用缩进的 # 以让 #%s 对传统 C 不可见”embedding a directive within macro arguments is not portable”将一个指示嵌入宏参数中是不可移植的”style of line directive is a GCC extension”line 指示的风格是一个 GCC 扩展”invalid preprocessing directive #%s”无效的预处理指示#%s”\”defined\” cannot be used as a macro name”“defined”不能被用作宏名”\”%s\” cannot be used as a macro name as it is an operator in C++”“%s”不能被用作宏名,因为它是 C++ 中的一个操作符”no macro name given in #%s directive”#%s 指示中未给出宏名”macro names must be identifiers”宏名必须是标识符”undefining \”%s\”"取消对“%s”的定义”missing terminating > character”缺少结尾的 > 字符”#%s expects \”FILENAME\” or ”#%s 需要 \”FILENAME\” 或”empty filename in #%s”#%s 中文件名为空”#include nested too deeply”#include 嵌套过深”#include_next in primary source file”#include_next 出现在主源文件中”invalid flag \”%s\” in line directive”line 指示中有无效的标记“%s””unexpected end of file after #line”#line 后未预期的文件结束”\”%s\” after #line is not a positive integer”#line 后的“%s”不是一个正整数”line number out of range”行号超出范围”\”%s\” is not a valid filename”“%s”不是一个有效的文件名”\”%s\” after # is not a positive integer”# 后的“%s”不是一个正整数”invalid #%s directive”无效的 #%s 指示”registering pragmas in namespace \”%s\” with mismatched name expansion”在命名空间“%s”中注册 pragma 时名称扩展不匹配”registering pragma \”%s\” with name expansion and nonamespace”pragma “%s”被注册为一个命名扩展,而没有命名空间”registering \”%s\” as both a pragma and a pragma namespace”“%s”既被注册为一个pragma 又被注册为一个 pragma 命名空间”#pragma %s %s is already registered”#pragma %s %s 已经被注册”#pragma %s is already registered”#pragma %s 已经被注册”registering pragma with NULL handler”pragma 注册为被 NULL 处理”#pragma once in main file”#pragma once 出现在主文件中”invalid #pragma push_macro directive”无效的 #pragma push_macro 指示”invalid #pragma pop_macro directive”无效的 #pragma pop_macro 指示”invalid #pragma GCC poison directive”无效的 #pragma GCC poison 指示”poisoningexisting macro \”%s\”"对已存在的宏“%s”投毒”#pragma system_header ignored outside include file”#pragma system_heade 在包含文件外被忽略”cannot find source file %s”找不到源文件%s”current file is older than %s”当前文件早于%s”_Pragma takes a parenthesized string literal”_Pragma 需要一个括起的字符串字面常量”#else without #if”#else 没有匹配的#if”#else after #else”#else 出现在 #else 后”the conditional began here”条件自此开始”#elif without #if”#elif 没有匹配的#if”#elif after #else”#elif 出现在 #else 后”#: directives.c:1960#endif without #if”#endif 没有匹配的#if”missing ‘(‘ after predicate”谓词后缺少‘(’”missing ‘)’ to complete answer”完整的答案缺少‘)’”predicate’s answer is empty”谓词的答案为空”assertion without predicate”断言后没有谓词”predicate must be an identifier”谓词必须是一个标识符”\”%s\” re-asserted”重断言“%s””unterminated #%s”未终止的#%s”unterminated comment”未结束的注释”stdout”stdout”%s: %s”%s:%s”too many decimal points in number”数字中有太多小数点”fixed-point constants are a GCC extension”定点常量是一个 GCC 扩展”invalid digit \”%c\” in binary constant”二进制常量中有无效数字“%c””invalid digit \”%c\” in octal constant”8 进制常量中有非法字符“%c””invalid prefix \”0b\” for floating constant”浮点常量的“0b”前缀无效”use of C99 hexadecimal floati ng constant”使用 C99 式的 16 进制浮点常量”exponent has no digits”指数部分没有数字”hexadecimal floating constants require an exponent”16 进制浮点常量需要指数部分”invalid suffix \”%.*s\” on floating constant”浮点常量的“%.*s”后缀无效”traditional C rejects the \”%.*s\” suffix”传统 C 不接受“%.*s”后缀”suffix for double constant is a GCC extension”双精度常量后缀是一个 GCC 扩展”invalid suffix \”%.*s\” with hexadecimal floating constant”十六进制浮点常量的“%.*s”后缀无效”decimal float constants are a GCC extension”十进制浮点常量是一个 GCC 扩展”invalid suffix \”%.*s\” on integer constant”整数常量的“%.*s”后缀无效”use of C++0x long long integer constant”使用 C++0x long long 整数常量”imaginary constants are a GCC extension”虚数常量是一个 GCC 扩展”binary constants are a GCC extension”二进制常量是一个 GCC 扩展”integer constant is too large for its type”整数常量值超出其类型”integer constant is so large that it is unsigned”整数常量太大,认定为unsigned”missing ‘)’ after \”defined\”"“defined” 后出现‘)’”operator \”defined\” requires an identifier”操作符“defined”需要一个标识符”(\”%s\” is an alternative token for \”%s\” in C++)”(在 C++ 中“%s”会是“%s”的替代标识符)”this use of \”defined\” may not be portable”使用“defined”可能不利于移植”floating constant in preprocessor expression”浮点常量出现在预处理表达式中”imaginary number in preprocessor expression”预处理表达式中出现虚数”\”%s\” is not defined”“%s”未定义”assertions are a GCC extension”断言是一个 GCC 扩展”assertions are a deprecated extension”断言是一个已过时的 GCC 扩展”missing binary operator before token \”%s\”"标识符“%s”前缺少二元运算符”token \”%s\” is not valid in preprocessor expressions”标识符“%s”在预处理表达式中无效”missing expre ssion between ‘(‘ and ‘)’”‘(’与‘)’之间缺少表达式”%s with no expression”%s 后没有表达式”operator ‘%s’ has no right operand”操作符‘%s’没有右操作数”operator ‘%s’ has no left operand”操作符‘%s’没有左操作数”‘:’ without preceding ‘?’”‘:’前没有‘?’”unbalanced stack in %s”%s 中堆栈不平衡”impossible operator ‘%u’”不可能的操作‘%u’”missing ‘)’ in expression”表达式中缺少‘)’”‘?’ without following ‘:’”‘?’后没有‘:’”integer overflow in preprocessor expression”预处理表达式中整数溢出”missing ‘(‘ in expression”表达式中缺少‘(’”the left operand of \”%s\” changes sign when promoted”“%s”的左操作数在提升时变换了符号”the right operand of \”%s\” changes sign when promoted”“%s”的右操作数在提升时变换了符号”traditional C rejects the unary plus operator”传统 C 不接受单目 + 运算符”comma operator in operand of #if”#if 操作数中出现逗号”division by zero in #if”#if 中用零做除数”NULL directory in find_file”find_file 中有 NULL 目录”one or more PCH files were found, but they were invalid”找到一个或多个 PCH 文件,但它们是无效的”use -Winvalid-pch for more information”使用 -Winvalid-pch 以获得更多信息”%s is a block device”%s 是一个块设备”%s is to o large”%s 过大”%s is shorter than expected”%s 短于预期”no include path in which to search for %s”没有包含路径可供搜索%s”Multiple include guards may be useful for:\n”多个防止重包含可能对其有用:\n”cppchar_t must be an unsigned type”cppchar_t 必须是无符号型”preprocessor arithmetic has maximum precision of %lu bits; target requires %lu bits”预处理算术的最高精度为 %lu 位;目标需要 %lu 位”CPP arithmetic must be at least as precise as a target int”CPP 算术必须至少具有目标 int 的精度”target char is less than 8 bits wide”目标 char 短于 8 位”target wchar_t is narrower than target char”目录 wchar_t 短于目标char”target int is narrower than target char”目标 int 短于目标char”CPP half-integer narrower than CPP character”CPP 半整数短于 CPP 字符”CPP on this host cannot handle wide character constants over %lu bits, but the target requires %lu bits”在此宿主机上,CPP 不能处理长于 %lu 位的宽字符常量,但目标需要 %lu 位”backslash and newline separated by space”反斜杠和换行为空格所分隔”backslash-newline at end of file”反斜杠续行出现在文件末尾”trigraph ??%c converted to %c”三元符 ??%c 转换为%c”trigraph ??%c ignored, use -trigraphs to enable”三元符 ??%c 被忽略,请使用 -trigraphs 来启用”\”/*\” within comment”“/*”出现在注释中”%s in preprocessing directive”预处理指示中出现%s”null character(s) ignored”忽略空字符”`%.*s’ is not in NFKC”‘%.*s’不在 NFKC 中”`%.*s’ is not in NFC”‘%.*s’不在 NFC 中”attempt to use poisoned \”%s\”"试图使用有毒的“%s””__VA_ARGS__ can only appear in the expansion of a C99 variadic macro”__VA_ARGS__ 只能出现在 C99 可变参数宏的展开中”identifier \”%s\” is a special operator name in C++”标识符“%s”是 C++ 中的一个特殊操作符”raw string delimiter longer than 16 characters”原始字符串分隔符长过 16 个字符”invalidcharacter ‘%c’ in raw string delimiter”原始字符串分隔符中有无效字符‘%c’”unterminated raw string”未终止的原始字符串”null character(s) preserved in literal”空字符将保留在字面字符串中”missing terminating %c character”缺少结尾的 %c 字符”C++ style comments are not allowed in ISO C90″C++ 风格的注释在 ISO C90 中不被允许”(this will be reported only once per input file)”(此警告为每个输入文件只报告一次)”multi-line comment”多行注释”unspellable token %s”无法拼出的标识符%s”macro \”%s\” is not used”宏“%s”未被使用”invalid built-in macro \”%s\”"无效的内建宏“%s””could not determine file timestamp”无法决定文件的时间戳”could not determine date and time”无法决定日期与时间”__COUNTER__ expanded inside directive with -fdirectives-only”带 -fdirectives-only 时 __COUNTER__ 在指示中扩展”invalid string literal, ignoring final ‘\\’”无效的字面字符串,忽略最后的‘\\’”pasting \”%s\” and \”%s\” does not give a valid preprocessing token”毗连“%s”和“%s”不能给出一个有效的预处理标识符”ISO C99 requires rest arguments to be used”ISO C99 需要使用剩余的参数”macro \”%s\” requires %u arguments, but only %u given”宏“%s”需要 %u 个参数,但只给出了 %u 个”macro \”%s\” passed %u arguments, but takes just %u”宏“%s”传递了 %u 个参数,但只需要 %u 个”unterminated argument list invoking macro \”%s\”"调用宏“%s”时参数列表未终止”function-like macro \”%s\” must be used with arguments in traditional C”类似函数的宏“%s”在传统 C 中必须与参数一起使用”invoking macro %s argument %d: empty macro arguments are undefined in ISO C90 and ISO C++98″调用宏 %s 的参数 %d:空的宏参数未被 ISO C90 和 ISO C++98 定义”duplicate macro parameter \”%s\”"重复的宏参数“%s””\”%s\” may not appear in macro parameter list”“%s”不能出现在宏参数列表中”macro parameters must be comma-separated”宏参数必须由逗号隔开”parameter name missing”缺少形参名”anonymous variadic macros were introduced in C99″匿名可变参数宏在 C99 中被引入”ISO C does not permit named variadic macros”ISO C 不允许有名的可变参数宏”missing ‘)’ in macro parameter list”在宏参数表中缺少‘)’”‘##’ cannot appear at either end of a macro expansion”‘##’不能出现在宏展开的两端”ISO C99 requires whitespace after the macro name”ISO C99 要求宏名后必须有空白”missing whitespace after the macro name”宏名后缺少空白”‘#’ is not followed by a macro parameter”‘#’后没有宏参数”\”%s\” redefined”“%s”重定义”this is the location of the previous definition”这是先前定义的位置”macro argument \”%s\” would be stringified in traditional C”宏参数“%s”将在传统 C 中被字符串化”invalid hash type %d in cpp_macro_definition”cpp_macro_definition 中有无效的散列类型%d”while writing precompiled header”在写入预编译头时”%s: not used because `%.*s’ is poisoned”%s:未使用因为‘%.*s’已被投毒”%s: not used because `%.*s’ not defined”%s:未使用因为‘%.*s’未定义”%s: not used because `%.*s’ defined as `%s’ not `%.*s’”%s:未使用因为‘%.*s’被定义为‘%s’而非‘%*.s’”%s: not used because `%s’ is defined”%s:未使用因为‘%s’已定义”%s: not used because `__COUNTER__’ is invalid”%s:未使用因为‘__COUNTER__’无效”while reading precompiled header”在读取预编译头时”detected recursion whilst expanding macro \”%s\”"展开宏“%s”时检测到递归”syntax error in macro parameter list”宏参数列表语法错误”#~ warning: ”#~ 警告:”#~ internal error: ”#~ 内部错误:”#~ error: ”#~ 错误:”#~ In file included from %s:%u”#~ 在包含自 %s:%u 的文件中”#~ ”#~ “,\n”#~ ” from %s:%u”#~ ”#~ “,\n”#~ ” 从 %s:%u”#~ no newline at end of file”#~ 文件未以空白行结束”。
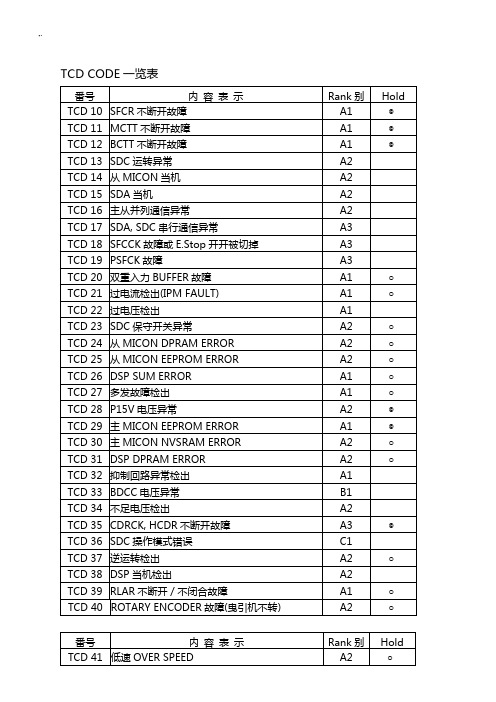
,.TCD CODE一览表◎:故障排除,主电源开关切OFF-ON后,操作MODE 2清除TCD,方能恢复运转。
○:故障排除,操作MODE 2清除TCD或主电源开关切OFF-ON后,方能恢复运转。
U V W控制櫃輸入電子台櫃馬達電源端子台54 A1 RE故障(U,V,W相磁极角度异常) ◎检出目的在PM马达控制中,变频控制器,利用编码器(ENCODER)uvw信号,来判断PM马达磁极所在位置,进一步送出正确的三相电压以产生一旋转磁场。
若编码器中任意一相以上损坏,将导致控制器送出的旋转磁场无法与马达磁极位置吻合,而造成马达运转不顺畅,让电梯产生晃动,此时应立即时停机。
检出条件1.Rotary Encoder的磁极检出Plus全部为HI,且持续检出1.37ms以上,则立即停止运转,且不可再起动。
2.Rotary Encoder的磁极检出Plus全部为LO,且持续检出1.37ms以上,则立即停止运转,且不可再起动。
注1.13. Rotary Encoder编码顺序不正常,且持续检出1.37ms以上,则立即停止运转,且不可再起动。
复归方式故障排除,FFB切OFF-ON后,操作MODE 2清除TCD,方能恢复运转。
调查项目:1.检查uvw之LED灯号是否正常。
2.检查ENCODER有无损坏〈下图〉,若损坏请更换ENCODER,若无请检查第二项。
观看编码器是否波型正常量测讯号3.检查U79 (AM26LS32AC) 有无损坏〈下图〉U79 (AM26LS32AC)55 A1马达电流检出回路异常◎检出目的本故障的检出目的及条件分为以下三种: 1、 避免HCT 长久使用损坏或Switching Power 之5V 电压异常下,使零点偏移(亦及电流为零时DSP 输入信号电压不为2.5V 与DSP A/D 参考电压不为5V)。
此时CPU 读入电流回授信号将不正确,而造成马达运转不顺畅,让电梯产生晃动,此时电梯不应再次走行。

Free Pascal错误一览表1.Out of memory[内存溢出]2.Identifier expected[缺标识符]3.Identifier not found[标识符未找到]*如:Identifier not found INTEGR[标识符INTEGER未找到]4.Duplicate identifier[重复说明]*如:Duplicate identifier N[变量N重复说明]5.Syntax error[语法错误]*6.Error in real constant[实型常量错]7.Error in integer constant[整型常量错]8.String constant exceeds line[字符串常量跨行]9.Too many nested file[文件嵌套过多]10.Unexpected end of file[非正常文件结束]11.Line to long[行过长]12.Type Identifier expected[缺类型标识符]13.Too many open file[打开文件过多]14.Invalid file name[无效文件名]15.File not found[文件未找到]*16.Disk full[磁盘满]17.Invalid compiler directive[无效编译指示]18.Too many file[文件过多]19.Undefined type in pointer definition[指针定义中未定义类型]20.Variable identifier expected[缺变量标识符]21.Error in type definition[类型错误说明]*22.Stucture too large[结构过长]23.Set base type out of range[集合基类型越界]24.File components may not be files or object[FILE分量不能为文件或对象]25.Invalid string length[无效字符串长度]26.Type mismatch[类型不匹配]*27.Invalid subrange base type[无效子界基类型]28.Lower bound greater than upper bound[下界大于上界]29.Ordinal type expected[缺有序类型]30.Integer constant expected[缺整型常数]31.Constant expected[缺常量]32.Integer or real constant expected[缺整型或实型常量]33.Pointe type identifier expected[缺指针类型标识符]34.Invalid function result type[无效的函数结果类型]bel identifier expected[缺标号标识符]36.Begin expected[缺BEGIN]*37.End expected[缺END]*38.Integer expression expected[缺整型表达式]39.Ordinal expression expected[缺有序表达式]40.Boolean expression expected[缺布尔表达式]41.Operand type do not match operator[操作数与操作符不匹配]42.Error in expression[表达式错]43.Illegal expression[非法赋值]*44.Field identifier expected[缺域标识符]45.Object file too large[目标文件过大]46.Undefined external[未定义外部标识符]47.Invalid object file record[无效OBJ文件记录]48.Code segment too large[代码段过长]49.Data segment too large[数据段过长]*50.Do expected[缺DO]*51.Invalid PUBLIC definition[无效PUBLIC定义]52.Invalid EXTRN definition[无效EXTRN定义]53.Too many EXTRN definition[EXTRN定义过多]54.Of extected[缺0F]*55.INTERFACE expected[缺INTERFACE]56.Invalid relocatable reference[无效重定位引用]57.THEN expected[缺THEN]*58.TO(DOWNTO)expected[缺T0或DOWNTO]*59.Undefined forward[提前引用未定义的说明]60.Too many procedures[过程过多]61.Invalid typecast[无效类型转换]62.Division by zero[被零除]63.Invalid typecast[无效文件类型]64.Cannot Read or Write variable of this type[不能读写该类型的变量]*65.Ponter variable expected[缺指针变量]66.String variable expected[缺字符串变量]67.String expression expected[缺字符串表达式]68.Circular unit reference[单元循环引用]69.Unit name mismatchg[单元名不匹配]70.Unit version mismatch[单元版本不匹配]71.Duplicate unit name[单元重名]72.Unit file format error[单元文件格式错误]73.Implementation expected[缺IMPLEMENTATl0N]74.constant and case types do not match[常数与CASE类型不相匹配]75.Record variable expected[缺记录变量]76.Constant out of range[常量越界]77.File variable expected[缺文件变量]78.Pointer extression expected[缺指针变量]79.Integer or real expression expected[缺整型或实型表达式]ble not within current block[标号不在当前块中]ble already defined[标号已定义]82.Undefined lable in preceding statement part[在前面语句中标号未定义]83.Invalid@argument[无效的@参数]84.Unit expected[缺UNIT]85.“;”expected[缺“;”]*86.“:”expected[缺“:”]*87.“,”expected[缺“,”]*88.“(”expected[缺“(”)*89.“)”expected[缺“]”]*90.“=”expected[缺“=”]*91.“:=”expected[缺“:=”]*92.“[”or“(”expected[缺“[”或“(”)*93.“]”or“)”expected[缺“]”或“)”]*94.“..”expected[缺“.”]*95.“..”expected[缺“..”]*96.Too many variable[变量过多]97.Invalid FOR control variable[无效FOR控制变量]98.Integer variable expected[缺整型变量]99.File and procedure types are not allowed here[此处不允许用文件和过程类型]100.Srting length mismatch[字符串长度不匹配]101.Invalid ordering of fields[无效域顺序]102.String constant expected[缺字符串常量]103.Integer or real variable expected[缺整型或实型变量]104.Ordinal variable expected[缺顺序变量]105.INLINE error[INLINE错]106.Character expression expected[缺字符表达式]107.Too many relocation items[重定位项过多]112.Case constant out of range[CASE常量越界]113.Error in statement[语句错]114.Can’t call an interrupt procedute[不能调用中断过程] 116.Must be in8087mode to complie this[必须在8087方式下编译]117.Target address not found[未找到目标地址]118.Include files are not allowed here[此处不允许包含INCLUDE文件]120.NIL expected[缺NIL]121.Invalid qualifier[无效限定符]122.Invalid variable reference[无效变量引用]123.Too many symbols[符号过多]124.Statement part too large[语句部分过长]126.Files must be var parameters[文件必须为变量参数]127.Too many conditional directive[条件符号过多]128.Misplaced conditional directive[条件指令错位]129.ENDIF directive missing[缺少ENDIF指令]130.Error in initial conditional defines[初始条件定义错] 131.Header does not match previous definition[过程和函数头与前面定义的不匹配]132.Critical disk error[严重磁盘错误]133.Can’t evalute this expression[不能计算该表达式]*如:Can’t evalute constart expression[不能计算该常量表达式] 134.Expression incorrectly terminated[表达式错误结束]135.Invaild format specifier[无效格式说明符]136.Invalid indirect reference[无效间接引用]137.Structed variable are not allowed here[此处不允许结构变量] 138.Can’t evalute without system unit[无SYSTEM单元不能计算] 139.Can’t access this symbols[不能存取该符号]140.Invalid floating–point operation[无效浮点运算]141.Can’t compile overlays to memory[不能将覆盖模块编译至内存] 142.Procedure or function variable expected[缺过程和函数变量] 143.Invalid procedure or function reference.[无效过程或函数引用] 144.Can’t overlay this unit[不能覆盖该单元]147.Object type expected[缺对象类型]148.Local object types are not allowed[不允许局部对象类型]149.VIRTUAL expected[缺VIRTUAL]150.Method identifier expected[缺方法标识符]151.Virtual constructor are not allowed[不允许虚拟构造方法] 152.Constructor Identifier expected[缺构造函数标识符]153.Destructor Identifier expected[缺析构函数标识符]154.Fail only allowed within constructors[FAIL标准过程只允许在构造方法内使用]155.Invalid combination of opcode and operands[无效的操作符和操作数组合]156.Memory reference expected[缺内存引用]157.Can’t add or subtrace relocatable symbols[不能加减可重定位符号]158.Invalid register combination[无效寄存器组合]159.286/287Instructions are not enabled[未激活286/287指令] 160.Invalid symbol reference[无效符号引用]161.Code generation error[代码生成错]162.ASM expected[缺ASM]二、运行错误运行错误将显示错误信息,并终止程序的运行。

在没有考虑vdw作用之前,算Bi2Se3材料soc中出现的错误汇总V ASP自旋轨道耦合计算错误汇总静态计算时,报错:VERY BAD NEWS! Internal内部error in subroutine子程序IBZKPT:Reciprocal倒数的lattice and k-lattice belong to different class of lattices. Often results are still useful (48)INCAR参数设置:对策:根据所用集群,修改INCAR中NPAR。
将NPAR=4变成NPAR=1,已解决!错误:sub space matrix类错误报错:静态和能带计算中出现警告:W ARNING: Sub-Space-Matrix is not hermitian共轭in DA V结构优化出现错误:WARNING: Sub-Space-Matrix is not hermitian in DA V 4 -4.681828688433112E-002对策:通过将默认AMIX=0.4,修改成AMIX=0.2(或0.3),问题得以解决。
以下是类似的错误:WARNING: Sub-Space-Matrix is not hermitian in rmm -3.00000000000000RMM: 22 -0.167633596124E+02 -0.57393E+00 -0.44312E-01 1326 0.221E+00BRMIX:very serious problems the old and the new charge density differ old charge density: 28.00003 new 28.06093 0.111E+00错误:WARNING: Sub-Space-Matrix is not hermitian in rmm -42.5000000000000ERROR FEXCP: supplied Exchange-correletion table is too small, maximal index : 4794错误:结构优化Bi2Te3时,log文件:WARNING in EDDIAG: sub space matrix is not hermitian 1 -0.199E+01RMM: 200 0.179366581305E+01 -0.10588E-01 -0.14220E+00 718 0.261E-01BRMIX: very serious problems the old and the new charge density differ old charge density: 56.00230 new 124.70394 66 F= 0.17936658E+01 E0= 0.18295246E+01 d E =0.557217E-02curvature: 0.00 expect dE= 0.000E+00 dE for cont linesearch 0.000E+00ZBRENT: fatal error in bracketingplease rerun with smaller EDIFF, or copy CONTCAR to POSCAR and continue但是,将CONTCAR拷贝成POSCAR,接着算静态没有报错,这样算出来的结果有问题吗?对策1:用这个CONTCAR拷贝成POSCAR重新做一次结构优化,看是否达到优化精度!对策2:用这个CONTCAR拷贝成POSCAR,并且修改EDIFF(目前参数EDIFF=1E-6),默认为10-4错误:WARNING: Sub-Space-Matrix is not hermitian in DA V 1 -7.626640664998020E-003网上参考解决方案:对策1:减小POTIM: IBRION=0,标准分子动力学模拟。
故障代码中文解释Err000无错误(* No error *)Err001变频器检测电网掉电(* Grid Loss detected by power converter Err002保留(* Reserve *) (* 0*)Err003保留(* Reserve *) (* 0*)Err004变频器复位超时(* Timeout occurred converter reset *) (Err005PLC软件ID不正确(* Plc software identification number no Err006变桨软件版本不正确(* Pitch software versions not correct *Err007偏航软件版本不正确(* Yaw software version not correct *) (Err008初始化时,轮毂未达到停止状态(* In initialization, hub doesn't reach Err009变频器软件版本不正确(* Converter software version not correc Err010检测不到机舱零位置(* Zero position nacelle can't be found Err011SS-0 熔丝熔断 (* SS-0: Fuse melted *) (* 3*)Err012SS-1 急停按钮 (* SS-1: Emergency button *) (* 3*)Err013SS-5 发电机超速 (* SS-5: Generator over speed *) (* 2*)Err014SS-6 振动传感器 (* SS-6: Vibration sensor *) (* 2*)Err015SS-7 转子超速 (* SS-7: Rotor over speed *) (* 5*)Err016SS-8 看门狗 (* SS-8: Watchdog *) (* 2*)Err017SS-9 制动器位置 (* SS-9: Brake position *) (* 2*)Err018SS-10 超出工作位置 (* SS-10: Working position exceeded *) (Err019SS-11 轮糓驱动(* SS-11: Hub drives *) (* 2*)Err020SS-12 存储继电器未复位(* SS-12: Storage relay not reset *) (* Err021柜内24V熔丝(* Fuse 24V internal cabinet *) (* 0*)Err022柜外24V熔丝(* Fuse 24V external cabinet *) (* 0*)Err023功率变频器未连接CAN总线(* Power converter not at the CANbus *) Err024功率变频器检查到故障(* Error detected by power converter *) Err025实际功率与要求功率不同(* Actual power differes to demanded *) Err026风速风向仪24V熔丝(* Fuse 24V anemometer *) (* 0*)Err027数字模块10未与CAN总线连接(* Digital module 10 not at bus *) (* 2*Err028模拟模块未与总线连接(* Analogue module not at bus *) (* 0*)Err029690V电流接触器侧熔丝(* Fuse line side contactor 690V *) (* 0Err03024V辅助电源熔丝(* Fuse 24V auxiliaries *) (* 0*)Err031变桨1通讯(* Communication pitch1 *) (* 2*)Err032变桨2通讯(* Communication pitch2 *) (* 2*)Err033变桨3通讯(* Communication pitch3 *) (* 2*)Err034SS-2制动器转子过速(* SS-2: over speed rotor for brake *) (Err035SS-3 三个叶片故障(* SS-3: All three blades error *) (* 5*Err036SS-4 制动器存储继电器(* SS-4: Brake storage relays *) (* 5*)Err037保留(* Reserve *) (* 0*)Err038变桨1停止超时(* Pitch 1 timeout Stop *) (* 0*)Err039变桨1基准位置超时(* Pitch 1 timeout Reference *) (* 0*)Err040变桨1合理性(* Pitch 1 plausibility *) (* 2*)Err041变桨2停止超时(* Pitch 2 timeout Stop *) (* 0*)Err042变桨2基准位置超时(* Pitch 2 timeout Reference *) (* 0*)Err043变桨2合理性(* Pitch 2 plausibility *) (* 2*)Err044变桨3停止超时(* Pitch 3 timeout Stop *) (* 0*)中英文故障对照表英文Err045变桨3基准位置超时(* Pitch 3 timeout Reference *) (* 0*) Err046变桨3合理性(* Pitch 3 plausibility *) (* 2*)Err047保留(* Reserve *) (* 0*)Err048变桨1手动操作盒连接(* Pitch 1 service box connected *) (* 2 Err049变桨1驱动错误(* Pitch 1 drive error *) (* 2*)Err050保留(* Reserve *) (* 0*)Err051变桨2手动操作盒连接(* Pitch 2 service box connected *) (* 2 Err052变桨2驱动错误(* Pitch 2 drive error *) (* 2*)Err053保留(* Reserve *) (* 0*)Err054变桨3手动操作盒连接(* Pitch 3 service box connected *) (* 2 Err055变桨3驱动错误(* Pitch 3 drive error *) (* 2*)Err056变桨1位置延时故障(* Pitch1 position error delayed *) (* 0 Err057变桨2位置延时故障(* Pitch2 position error delayed *) (* 0 Err058变桨3位置延时故障(* Pitch3 position error delayed *) (* 0 Err059变桨位置没有同步变慢(* Pitch positions not synchronous slow Err060变桨位置没有同步变快(* Pitch positions not synchronous fast Err061轮毂速度未设置为最大速度(* Maximum hub speed not set to the rate Err062变桨1基准位置错误(* Pitch1 reference positioning error *) Err063变桨2基准位置错误(* Pitch2 reference positioning error *) Err064变桨3基准位置错误(* Pitch3 reference positioning error *) Err065变桨1限位开关未在初始状态(* Pitch 1 limiting switch not active in Err066变桨2限位开关未在初始状态(* Pitch 2 limiting switch not active in Err067变桨3限位开关未在初始状态(* Pitch 3 limiting switch not active in Err068变桨1限位开关未在安全状态(* Pitch 1 limiting switch not active in Err069变桨2限位开关未在安全状态(* Pitch 2 limiting switch not active in Err070变桨3限位开关未在安全状态(* Pitch 3 limiting switch not active in Err071快速停止超时-高速(* Fast stop timeout high speed *) (* 2* Err072快速停止超时-低速(* Fast stop timeout low speed *) (* 2*) Err073完全停止超时-高速(* Full stop timeout high speed *) (* 2* Err074完全停止超时-高速(* Full stop timeout low speed *) (* 2*) Err075安全链停止超时-高速(* Safety chain stop timeout high speed Err076安全链停止超时-低速(* Safety chain stop timeout low speed * Err077网侧变频器电流测量(* LSC current measurement *) (* 0*)Err078发电机侧变频器电流测量(* GSC current measurement *) (* 0*)Err079直流母线连接网电压预充电(* DC bus to Line voltage in precharge * Err080发电机编码器反馈(* Generator encoder feedback *) (* 0*) Err081滑环编码器反馈(* Hub slipring encoder feedback *) (* 0 Err082轮毂速度波动误差限度(* Hub speed fluctuation error limit *) Err083保留(* Reserve *) (* 0*)Err084保留(* Reserve *) (* 0*)Err085保留(* Reserve *) (* 0*)Err086保留(* Reserve *) (* 0*)Err087保留(* Reserve *) (* 0*)Err088保留(* Reserve *) (* 0*)Err089保留(* Reserve *) (* 0*)Err090保留(* Reserve *) (* 0*)Err091保留(* Reserve *) (* 0*)Err092无油泵时齿轮箱压力(* Gearbox pressure at no pumping *) (* Err093齿轮箱加热超时(* Timeout gearbox heating *) (* 0*)Err094电池充电超时(* Timeout battery charging *) (* 0*) Err095偏航超时(* Timeout yawing *) (* 0*)Err096转速与转子速度信号有差异(* Speed difference rotor speed signals Err097速度继电器1电缆切断(* Wire cut rotor speed relais 1 *) (* 2 Err098速度继电器2电缆切断(* Wire cut rotor speed relais 2 *) (* 2 Err099保留(* Reserve *) (* 0*)Err100保留(* Reserve *) (* 0*)Err101保留(* Reserve *) (* 0*)Err102保留(* Reserve *) (* 0*)Err103NCC310柜急停按钮(* NCC310 cabinet emergency stop button Err104TBC300齿轮箱急停按钮(* CTB300 Gearbox emergency stop button Err105TBC100急停按钮(* TBC100 emergency stop button *) (* 3* Err106机舱电池柜电压过高或者无连接(* Nacelle battery extremly high or not Err107高压变压器温度(* HV Transformer temperature *) (* 0*) Err108发电机传感器PT100悬空(* PT100 sensor generator overhang *) (* Err109发电机传感器PT100悬空(* PT100 sensor generator overhang *) (* Err110发电机传感器PT100悬空(* PT100 sensor generator overhang *) (* Err111发电机轴驱动侧传感器PT100(* PT100 sensor generator bearing drive Err112发电机轴非驱动侧传感器PT100(* PT100 sensor generator bearing non dr Err113齿轮箱轴传感器PT100(* PT100 sensor gearbox bearing *) (* 0* Err114齿轮箱油温传感器PT100(* PT100 sensor gearbox oil *) (* 0*) Err115机舱电池柜电压过低或者无连接(* Nacelle battery extremly low or not c Err116机舱温度高(* Nacelle temperature high *) (* 0*) Err117机舱温度传感器缺失(* Nacelle temperature sensor defect *) Err118转子扼流圈温度高(* Rotor choke temperature high *) (* 0* Err119网侧变频器滤波熔丝(* Fuse for filter at line side converte Err120未达到偏航额定转速(* Yaw rated speed not reached *) (* 0*) Err121环境温度太高(* Environment temperature too high *) ( Err122发电机内温度(* Temperature generator overhang *) (* Err123发电机轴温(* Temperature generator bearing *) (* 0 Err124齿轮箱油温(* Temperature gearbox oil *) (* 0*)Err125机舱柜温度(* Temperature nacelle cabinet *) (* 0*) Err126齿轮箱轴温(* Temperature gearbox bearing *) (* 0*) Err127刹车垫磨损大于2mm(* Brake pad wear > 2 mm *) (* 0*)Err128制动泵无压力(* Brake pump no pressure *) (* 0*)Err129安全链没有检测到制动器关闭(* Closed brake not detected by safety c Err130齿轮箱油位太低(* Gearbox oil level too low *) (* 0*) Err131齿轮箱油温高于90°(* Gearbox oil temperature > 90鳦 *) (* Err132制动泵断路器(* Circuit breaker brake pump *) (* 0*) Err133接地故障保护限制低(* Ground fault protection limit low *) Err134接地故障保护限制低(* Ground fault protection limit high *) Err135电池检测失败三次,低电压(* Battery test failed three times, low Err136保留(* Reserve *) (* 0*)Err137接地故障保护信号切断(* Ground fault protection signal cut *) Err138竖立时,机舱位置变化(* Nacelle position change during standErr139自动制动调节(* Automatic brake adjust *) (* 0*)Err140机舱位置超出(* Nacelle position exceeded *) (* 0*) Err141偏航变频器熔丝(* Fuse yaw converter *) (* 0*)Err142熔丝或直流电源接地(* Fuse or earth current DC supply *) (* Err143制动器位置不够(* Brake open position not reached *) (* Err144齿轮箱断路器-高速(* Circuit breaker gearbox high speed *) Err145转子开关未设定在自动模式(* Rotor lock switch not set in automati Err146制动阀缺失(* Brake valve defect *) (* 2*)Err147400V中断(* 400V interuption *) (* 0*)Err148电池接地故障(* Battery earth fault *) (* 0*)Err149齿轮箱泵低速运行断路器(* Circuit breaker gearbox low speed *) Err150轮毂速度过低(* Speed difference small rotor speed *) Err151发电机转速过低(* Speed difference generator speed too Err152超速级别高(* Over speed level high *) (* 4*)Err153超速级别低(* Over speed level low *) (* 4*)Err154齿轮箱高速泵无压力(* Gearbox high speed pump no pressure * Err155电池检测电网掉电(* Grid loss detected by battery *) (* 0 Err156机舱位置变化太小(* Position change in nacelle position i Err157电池检测时电压变化小(* Too small voltage difference battery Err158检测到发电机过速(* over speed by generator signal *) (* Err159变频器不同步(* Converter did not synchronise *) (* 0 Err160风速风向仪测量错误(* Anemometer measurement error. *) (* 0 Err161保留(* Reserve *) (* 0*)Err162风速在0m/s超过9小时(* winspeed signal zero for 9h *) (* 0*) Err163风速计通讯错误(* Anemometer communication error *) (* Err164PT100传感器电池温度(* PT100 sensor battery temperature *) ( Err165电池温度过低(* Battery too low temperature *) (* 0*) Err166保留(* Reserve *) (* 0*)Err167在备用或更新单元电池电压过低(* Battery voltage too lowstandby or ref Err168与偏航变频器连接的手动操作箱(* Service box yaw converter connected * Err169功率消耗 > 30 KW(* Power consumption > 30 kW *) (* 0*) Err170偏航变频器没有连接到CAN总线上(* Yaw converter not on CAN-BUS *) (* 0* Err171偏航时机舱位置无变化(* No change in the nacelle positionmovi Err172230V偏航制动器熔丝(* Fuse yaw brake 230V *) (* 0*)Err173水泵的断路器(* Circuit breaker water pump *) (* 0*) Err174变频柜入水口水压阀断路器(* Circuit breaker water valve at conver Err175变浆制动器熔丝230V(* Fuse pitch brake 230V *) (* 0*)Err176保留(* Reserve *) (* 0*)Err177保留(* Reserve *) (* 0*)Err178变频器CAN数据复用器不工作(* Converter CAN data multiplexer not OK Err179碳刷监控故障(* Reserve *) (* 0*)Err180保留(* Reserve *) (* 0*)Err181保留(* Reserve *) (* 0*)Err182保留(* Reserve *) (* 0*)Err183保留(* Reserve *) (* 0*)Err184保留(* Reserve *) (* 0*)Err185保留(* Reserve *) (* 0*)Err186保留(* Reserve *) (* 0*)Err187保留(* Reserve *) (* 0*)Err188保留(* Reserve *) (* 0*)Err189保留(* Reserve *) (* 0*)Err190保留(* Reserve *) (* 0*)Err191保留(* Reserve *) (* 0*)Err192保留(* Reserve *) (* 0*)Err193保留(* Reserve *) (* 0*)Err194保留(* Reserve *) (* 0*)Err195保留(* Reserve *) (* 0*)Err196保留(* Reserve *) (* 0*)Err197保留(* Reserve *) (* 0*)Err198保留(* Reserve *) (* 0*)Err199保留(* Reserve *) (* 0*)Err200保留(* Reserve *) (* 0*)Err201保留(* Reserve *) (* 0*)Err202保留(* Reserve *) (* 0*)Err203保留(* Reserve *) (* 0*)Err204保留(* Reserve *) (* 0*)Err205变频器CROWBAR安全检查(* Health check converter crowbar *) (* Err206DC bus电压,变浆,电池电压的自检(* Health check difference DC bus voltag Err207自检变浆到设定位置的工作时间(* Health check timeout pitch move to de Err208在安全链打开的情况下,桨叶不向回移动(* Health check pitch not move back at o Err209安全检查时制动器没有关闭(* Health check brake not closed *) (* 0 Err210安全检查时制动器压力(* Health check brake pressure *) (* 0*) Err211安全检查时风速风向仪不正确(* Health check anemometer not plausible Err212安全检查时电池无法使变浆回位(* Health check pitch not moved back by Err213安全检查时电池没有检测到电网掉电(* Health check batteries didn't detect Err214安全检查轴承摩擦太大(* Health check friction bearing too hig Err215不间断电源完全放电, 电流接触器(* Battery UPS total discharging, contac Err216不间断电源测试启动, 电流接触器(* Battery UPS test activation, contacto Err217400V不间断电源 电流接触器1(* Battery UPS 400V contactor1 *) (* 0*) Err218400V不间断电源 电流接触器2(* Battery UPS 400V contactor2 *) (* 0*) Err219直流电源500V电流接触器没关闭(* Contactor supply 500V DC not closed * Err220柜风扇熔断器(* Fuse cabinet fans *) (* 0*)Err221230V 电源接口继电器熔丝(* Fuse interface relays 230V supply *) Err222滤波板温度(* Filter plate temperature *) (* 0*) Err223自动加热器熔丝(* Fuse thermostat heating *) (* 0*)Err224偏航变频器温度(* Yaw converter error *) (* 0*)Err225制动泵接触器(* Brake pump contactor *) (* 0*)Err226塔筒通信失败看门狗显示(* Tower base communication failure watc Err227保留(* Reserve *) (* 0*)Err228保留(* Reserve *) (* 0*)Err229变频器阻流其温度(* Converter choke temperature *) (* 0*) Err230齿轮箱风扇接触器(* Gearbox fan contactor *) (* 0*)Err231水泵接触器(* Water pump contactor *) (* 0*)Err232从站PLC检测从站通讯错误(* Slave communication failure detectedErr233主站PLC检测主站通讯错误(* Slave communication failure detected Err234齿轮箱低速泵接触器(* Gearbox low speed pump contactor *) ( Err235齿轮箱高速泵接触器(* Gearbox high speed pump contactor *) Err236驱动侧振动AC加速度传感器(* Acceleration sensor AC drive side *) Err237非驱动侧振动AC加速度传感器(* Acceleration sensor AC non-drive side Err238保留(* Reserve *) (* 0*)Err239保留(* Reserve *) (* 0*)Err240保留(* Reserve *) (* 0*)Err241驱动列摇摆(* Drive train swinging *) (* 4*)Err242塔架移动驱动侧(* Tower movement drive side *) (* 4*) Err243塔架移动非驱动侧(* Tower movement non-drive side *) (* 4 Err244齿轮箱压力传感器(* Gearbox pressure sensor *) (* 0*)Err245驱动侧振动DC加速度传感器(* Acceleration sensor DC drive side *) Err246非驱动侧振动DC加速度传感器(* Acceleration sensor DC non-drive side Err2471000秒内机舱摆动警告3次(* 3 nacelle swinging warning in 1000s * Err248一分钟内定子电流过滤值太高(* Stator current filtered in 1min too h Err249一分钟内总电流过滤值过高(* Total current filtered in 1min too hi Err250偏航定位系统-左/右位被转换(* Yaw position system - Left/Right bit Err251电网功率10分钟内过滤值过高(* Grid power filtered in 10min too high Err252电网功率1分钟内过滤值过高(* Grid power filtered in 1min too high Err253电网功率10秒内过滤值过高(* Grid power filtered in 10s too high * Err254移动时偏航功率低于错误极限值(* Yaw power below error limit at moving Err255保留(* Reserve *) (* 0*)power converter *) (* 6*)ed converter reset *) (* 0*)dentification number not correct *) (* 0*) versions not correct *) (* 0*)ersion not correct *) (* 0*)ion, hub doesn't reach state stop *) (* 0*) ware version not correct *) (* 0*)nacelle can't be found *) (* 0*)ted *) (* 3*)y button *) (* 3*)r over speed *) (* 2*)n sensor *) (* 2*)er speed *) (* 5*)*) (* 2*)sition *) (* 2*)position exceeded *) (* 2*)ves *) (* 2*)relay not reset *) (* 2*)nal cabinet *) (* 0*)nal cabinet *) (* 0*)r not at the CANbus *) (* 6*)by power converter *) (* 6*)ifferes to demanded *) (* 0*)meter *) (* 0*)10 not at bus *) (* 2*)e not at bus *) (* 0*)contactor 690V *) (* 0*)iaries *) (* 0*)pitch1 *) (* 2*)pitch2 *) (* 2*)pitch3 *) (* 2*)ed rotor for brake *) (* 5*)e blades error *) (* 5*)orage relays *) (* 5*)t Stop *) (* 0*)t Reference *) (* 0*)bility *) (* 2*)t Stop *) (* 0*)t Reference *) (* 0*)bility *) (* 2*)t Stop *) (* 0*)t Reference *) (* 0*)bility *) (* 2*)e box connected *) (* 2*)error *) (* 2*)e box connected *) (* 2*)error *) (* 2*)e box connected *) (* 2*)error *) (* 2*)n error delayed *) (* 0*)n error delayed *) (* 0*)n error delayed *) (* 0*)s not synchronous slow *) (* 0*)s not synchronous fast *) (* 0*)eed not set to the rated maximum *) (* 2*)ce positioning error *) (* 0*)ce positioning error *) (* 0*)ce positioning error *) (* 0*)ng switch not active in stop_ok state *) (* 2*) ng switch not active in stop_ok state *) (* 2*) ng switch not active in stop_ok state *) (* 2*) ng switch not active in safety_ok state *) (* 2*) ng switch not active in safety_ok state *) (* 2*) ng switch not active in safety_ok state *) (* 2*) out high speed *) (* 2*)out low speed *) (* 2*)out high speed *) (* 2*)out low speed *) (* 2*)top timeout high speed *) (* 5*)top timeout low speed *) (* 2*)asurement *) (* 0*)asurement *) (* 0*)voltage in precharge *) (* 0*)der feedback *) (* 0*)ncoder feedback *) (* 0*)tuation error limit *) (* 0*)re at no pumping *) (* 0*)x heating *) (* 0*)y charging *) (* 0*)*) (* 0*)ce rotor speed signals *) (* 0*)speed relais 1 *) (* 2*)speed relais 2 *) (* 2*)emergency stop button *) (* 3*)emergency stop button *) (* 3*)cy stop button *) (* 3*)y extremly high or not connected *) (* 0*) temperature *) (* 0*)enerator overhang *) (* 0*)enerator overhang *) (* 0*)enerator overhang *) (* 0*)enerator bearing drive *) (* 0*)enerator bearing non drive *) (* 0*) earbox bearing *) (* 0*)earbox oil *) (* 0*)y extremly low or not connected *) (* 0*) ature high *) (* 0*)ature sensor defect *) (* 0*)mperature high *) (* 0*)r at line side converter *) (* 0*)d not reached *) (* 0*)mperature too high *) (* 0*)nerator overhang *) (* 0*)nerator bearing *) (* 0*)arbox oil *) (* 0*)celle cabinet *) (* 0*)arbox bearing *) (* 0*)> 2 mm *) (* 0*)pressure *) (* 0*)ot detected by safety chain *) (* 2*)vel too low *) (* 0*)mperature > 90鳦 *) (* 0*)r brake pump *) (* 0*)rotection limit low *) (* 0*)rotection limit high *) (* 6*)ailed three times, low voltage *) (* 0*) rotection signal cut *) (* 0*)on change during stand still *) (* 0*)e adjust *) (* 0*)on exceeded *) (* 0*)rter *) (* 0*)current DC supply *) (* 0*)ition not reached *) (* 0*)r gearbox high speed *) (* 0*)tch not set in automatic mode *) (* 2*)fect *) (* 2*)on *) (* 0*)fault *) (* 0*)r gearbox low speed *) (* 0*)ce small rotor speed *) (* 0*)ce generator speed too small *) (* 4*)el high *) (* 4*)el low *) (* 4*)peed pump no pressure *) (* 0*)cted by battery *) (* 0*)e in nacelle position is too small *) (* 0*)age difference battery test *) (* 0*)generator signal *) (* 4*)not synchronise *) (* 0*)surement error. *) (* 0*)l zero for 9h *) (* 0*)munication error *) (* 0*)attery temperature *) (* 0*)w temperature *) (* 0*)e too lowstandby or refresh state *) (* 0*)w converter connected *) (* 0*)ion > 30 kW *) (* 0*)not on CAN-BUS *) (* 0*)he nacelle positionmoving of yaw *) (* 0*)230V *) (* 0*)r water pump *) (* 0*)r water valve at converter cabinet inlet *) (* 0*) ke 230V *) (* 0*)data multiplexer not OK *) (* 0*)r crowbar *) (* 0*)ifference DC bus voltage pitch and batterie voltage *) (* 0*) imeout pitch move to demanded position *) (* 0*)itch not move back at open safety chain *) (* 5*)rake not closed *) (* 0*)rake pressure *) (* 0*)nemometer not plausible *) (* 0*)itch not moved back by battery *) (* 0*)atteries didn't detect grid loss *) (* 0*)riction bearing too high *) (* 0*)tal discharging, contactor *) (* 0*)st activation, contactor *) (* 0*)0V contactor1 *) (* 0*)0V contactor2 *) (* 0*)ly 500V DC not closed *) (* 0*)ans *) (* 0*)relays 230V supply *) (* 0*)emperature *) (* 0*)t heating *) (* 0*)error *) (* 0*)tactor *) (* 0*)munication failure watchdog *) (* 0*)e temperature *) (* 0*)ntactor *) (* 0*)tactor *) (* 0*)ation failure detected by slave PLC *) (* 2*)ation failure detected by master PLC *) (* 2*) eed pump contactor *) (* 0*)peed pump contactor *) (* 0*)ensor AC drive side *) (* 0*)ensor AC non-drive side *) (* 0*)inging *) (* 4*)drive side *) (* 4*)non-drive side *) (* 4*)re sensor *) (* 0*)ensor DC drive side *) (* 0*)ensor DC non-drive side *) (* 0*)ging warning in 1000s *) (* 0*)filtered in 1min too high *) (* 0*)filtered in 1min too high *) (* 0*)ystem - Left/Right bit inverted *) (* 0*) tered in 10min too high *) (* 0*)tered in 1min too high *) (* 0*)tered in 10s too high *) (* 0*)w error limit at moving *) (* 0*)。
常见错误信息提示
ACTION : 行动代码不正确
SEATS : 订座数与PNR中旅客数不一致
SEGMENT : 城市对输入无效
TIME : 输入时间不正确
FLT NUMBER : 航班号不正确
SCH NBR : 航线序号不符
FORMAT :指令格式
ACTION CODE : 行动代码不正确
CITY PAIR : 城市或城市对输入不正确
AIRLINE : 航空公司代码不正确
DATE 输入的日期不正确
OFFICE 部门代码不正确
PSGR ID :旅客标识不正确
CONTACT ELEMENT MISSING 缺少联系组,将旅客的联系电话输入到PNR 中
MAX TIME FOR EOT - IGNORE PNR AND RESTART
建立了航段组,但未封口的时间超过5分钟,这时系统内部已经做了IG,将座位还原,营业员应做IG,并重新建立PNR
NAMES PNR中缺少姓名项。
通用版初中物理九年级物理全册第十五章电流和电路易错题集锦单选题1、有一种自动控制的楼道灯,用表示“声敏”开关,有声音时闭合;用表示“光敏”开关,楼道光线非常暗时闭合。
在晚上楼道内有人走动发出声音时,“光敏”和“声敏”开关都闭合灯才亮。
下列图中能实现以上功能的是()A.B.C.D.2、“践行低碳环保,倡导绿色出行”,常德市城区共享单车、共享电动车、电动公共汽车为市民的绿色出行提供了方便。
电动公共汽车的动力来源于电动机,前后两门(电路开关)中任意一个门没有关闭好,电动公共汽车都无法行驶。
图中符合要求的电路是()A.B.C.D.3、常德市在旧城改造中,对空巢老人居住的房屋优先实施改造。
志愿者小唐对刘奶奶的厨房电路进行了改造,用LED灯替换了白炽灯,添加了一个换气扇,刘奶奶说开关要方便且省电。
选项图中符合要求的电路是()A.B.C.D.4、如图所示是某种USB键盘清洁器,它有两个开关,开关S1只控制照明用的小灯泡L,开关S2只控制吸尘用的电动机。
在选项所示四个电路图中符合上述设计要求的是()A.B.C.D.5、下列物质属于绝缘体的是()A.铜B.铝C.银D.橡胶6、毛皮摩擦过的橡胶棒带负电,说明摩擦过程中橡胶棒()A.得到负电荷B.失去负电荷C.得到正电荷D.失去正电荷7、如图所示,某同学设计一个楼道照明“智能化”电路,即利用“光控开关”(天黑时自动闭合,天亮时自动断开)和“声控开关”(当有人走过发出声音时,自动闭合,无人走过没有声音时,自动断开)来控制灯泡。
下列符合要求的电路图是()A.B.C.D.8、在图甲所示的电路中,闭合开关后电流表的示数如图乙所示。
下列描述正确的是()A.灯泡L1与L2并联B.电压表测L2两端的电压C.通过L1、L2的电流相等D.通过L1的电流为0.22A9、小致设计了一款电动玩具警车。
只闭合开关S1,警示灯L发光;只闭合开关S2,电动机工作,玩具警车运动。
以下设计符合要求的是()A.B.C.D.10、如图所示的电路,闭合开关后,下列关于A、B、C三处电流的大小关系正确的是()A.IA>IB>IC B.IA<IB<IC C.IA=IB=IC D.IA=IC>IB11、用丝线吊起三个通草球,其中任意两个靠近都相互吸引,则它们可能是()A.两个带异种电,一个不带电B.两个带负电,一个带正电C.两个带正电,一个不带电D.两个带正电,一个带负电12、如图所示为一种新型“水温感应龙头”。
新手用ICC编程的时候,经常会出现一些错误,现在将常见的错误报告整理如下。这里的一些错误是我为了展示而故意制造的,欢迎你提供你遇到的错误。排名不分先后: 一、正常编译通过 CODE: C:\icc\bin\imakew -f main.mak iccavr -c -IC:\icc\include\ -e -DATMEGA -DATMega16 -l -g -Mavr_enhanced D:\桌面\实验教程\LED应用\霓虹灯\main.c iccavr -o main -LC:\icc\lib\ -g -ucrtatmega.o -bfunc_lit:0x54.0x4000 -dram_end:0x45f -bdata:0x60.0x45f -dhwstk_size:16 -beeprom:1.512 -fihx_coff -S2 @main.lk -lcatmega Device 1% full. Done. 这是我们最想看到的了,万事大吉。
二、工程中未加入.C文件 CODE:
C:\icc\bin\imakew -f main.mak iccavr -o main -LC:\icc\lib\ -g -ucrtatmega.o -bfunc_lit:0x54.0x4000 -dram_end:0x45f -bdata:0x60.0x45f -dhwstk_size:16 -beeprom:1.512 -fihx_coff -S2 @main.lk -lcatmega unknown file type @main.lk, passed to linker !ERROR unknown file type '@main.lk' C:\icc\bin\imakew.exe: Error code 1 Done: there are error(s). Exit code: 1
解决办法:将你的程序加入工程中,可以右键程序区>>ADD to project 三、程序没有后缀名,或者后缀名不正确。 CODE:
C:\icc\bin\imakew -f main.mak C:\icc\bin\imakew.exe: 'main' is up to date Done.
这是一个很难理解的错误,它是由工程中的程序文件没有后缀名造成的。 解决办法:将原有文件移出工程,将文件的后缀名改为.C,然后再加入工程中。
四、没有main函数 CODE: C:\icc\bin\imakew -f main.mak iccavr -c -IC:\icc\include\ -e -DATMEGA -DATMega16 -l -g -Mavr_enhanced D:\桌面\实验教程\LED应用\霓虹灯\main.c iccavr -o main -LC:\icc\lib\ -g -ucrtatmega.o -bfunc_lit:0x54.0x4000 -dram_end:0x45f -bdata:0x60.0x45f -dhwstk_size:16 -beeprom:1.512 -fihx_coff -S2 @main.lk -lcatmega !ERROR file 'crtatmega.o': undefined symbol '_main' C:\icc\bin\imakew.exe: Error code 1 Done: there are error(s). Exit code: 1
解决办法,编写程序主函数MAIN。 五、没有选择目标芯片出现如下错误: CODE: C:\icc\bin\imakew -f main.mak iccavr -c -IC:\icc\include\ -e -l -g -Wa-W D:\桌面\实验教程\LED应用\霓虹灯\main.c iccavr -o main -LC:\icc\lib\ -g -Wl-W -bfunc_lit:0.0x2000 -dram_end:0x25f -bdata:0x60.0x25f -dhwstk_size:16 -beeprom:1.512 -fihx_coff -S2 @main.lk !E C:\icc\lib\crtAVR.o(41): Code address 0 already contains a value !E C:\icc\lib\crtAVR.o(41): Code address 0x1 already contains a value C:\icc\bin\imakew.exe: Error code 1 Done: there are error(s). Exit code: 1
解决办法:project>>Options>>target>>device configuration 选择合适的芯片。 六、缺少分号 CODE:
C:\icc\bin\imakew -f main.mak iccavr -c -IC:\icc\include\ -e -DATMEGA -DATMega16 -l -g -Mavr_enhanced D:\桌面\实验教程\LED应用\霓虹灯\main.c !E D:\桌面\实验教程\LED应用\霓虹灯\main.c(52): unrecognized statement !E D:\桌面\实验教程\LED应用\霓虹灯\main.c(53): syntax error; found `}' expecting `;' !E D:\桌面\实验教程\LED应用\霓虹灯\main.c(53): syntax error; found `end of input' expecting `}' C:\icc\bin\imakew.exe: Error code 1 C:\icc\bin\imakew.exe: 'main.o' removed. Done: there are error(s). Exit code: 1 上面的报告说明了第52行缺少一个分号,预期分号的地方出现了“}”。 解决方法,在52行末尾添加分号。 类似的有:缺少}的报错 CODE:
C:\icc\bin\imakew -f main.mak iccavr -c -IC:\icc\include\ -e -DATMEGA -DATMega16 -l -g -Mavr_enhanced D:\桌面\实验教程\LED应用\霓虹灯\main.c !E D:\桌面\实验教程\LED应用\霓虹灯\main.c(55): illegal statement termination !E D:\桌面\实验教程\LED应用\霓虹灯\main.c(55): skipping `void' !W D:\桌面\实验教程\LED应用\霓虹灯\main.c(55):[warning] calling function without prototype may cause errors !E D:\桌面\实验教程\LED应用\霓虹灯\main.c(56): syntax error; found `{' expecting `;' !E D:\桌面\实验教程\LED应用\霓虹灯\main.c(57): syntax error; found `end of input' expecting `}' C:\icc\bin\imakew.exe: Error code 1 C:\icc\bin\imakew.exe: 'main.o' removed. Done: there are error(s). Exit code: 1
七:变量没有定义 CODE:
C:\icc\bin\imakew -f main.mak iccavr -c -IC:\icc\include\ -e -DATMEGA -DATMega16 -l -g -Mavr_enhanced D:\桌面\实验教程\LED应用\霓虹灯\main.c !E D:\桌面\实验教程\LED应用\霓虹灯\main.c(48): undeclared identifier `i' C:\icc\bin\imakew.exe: Error code 1 C:\icc\bin\imakew.exe: 'main.o' removed. Done: there are error(s). Exit code: 1
解决办法:在程序开始前添加变量定义,比如unsigned char i;注意,定义变量要在函数的最前面进行,及在进行计算操作之前定义所有变量。
欢迎你发布你遇到的错误和解决方法,或者你遇到的错误还没解决的。 好东西,喜欢。 感谢 [小飞]一凡 提供下面的内容。 !E touchpad.c(67): unrecognized statement !E touchpad.c(68): syntax error; found `void' expecting `;'
上一行缺少“;”号所致。 !W touchpad.c(325):[warning] calling function without prototype may cause errors
没有在头文件中添加调用的函数库 !E E:\ICCAVR\icc\user001\main.c(100): undeclared identifier `temp'
错误:变量'temp'未声明 !E D:\iccavr6.31.A\icc\lib\crtAVR.(41):Codeaddress 0 already contains a value !E D:\iccavr6.31.A\icc\lib\crtAVR.(41):Codeaddress 0x1 already contains a value
没有选择芯片型号。 !E library(31) area ' text' not large enough
程序空间不够。 ?!E _3Q0.AAA(0): area 'data' not large enough
内存不足 C:/icc/include/iom8v.h(18): D:\icc圆织机程序\8.c(288): Macro redefinition of TWBR
重复定义TWBR calling function without prototype may cause errors
没有extern声明 !E lianxi.o(103): multiple define: '_main' main函数重复了,应该只能有一个main. [warning] declaring a function without prototype may cause errors