高速公路汽车安全距离模型
- 格式:pdf
- 大小:199.55 KB
- 文档页数:4

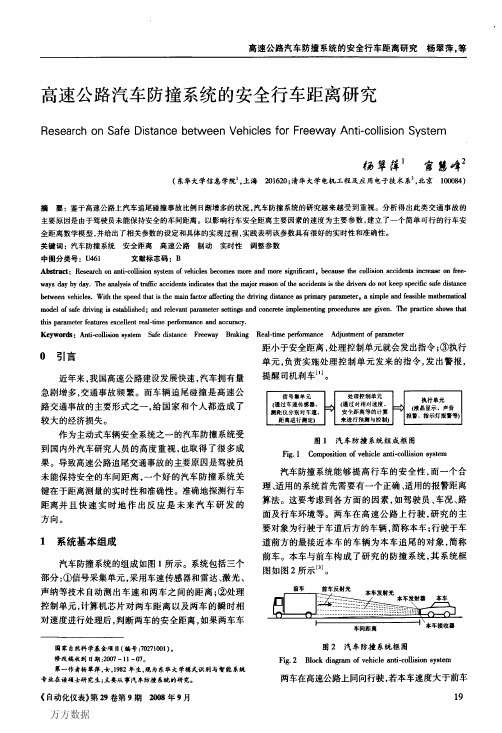
第19卷第2期2019年4月交通运输系统工程与信息Journal of Transportation Systems Engineering and Information TechnologyV ol.19No.2April 2019文章编号:1009-6744(2019)02-0182-07中图分类号:U491.3文献标志码:ADOI:10.16097/ki.1009-6744.2019.02.026双车道公路超车安全距离模型张文会*,孙舒蕊,苏永民(东北林业大学交通学院,哈尔滨150040)摘要:双车道公路上因超车不当而导致交通事故频发且后果多较为严重,故提出超车安全距离模型,旨在为超车安全预警装置、超车辅助判断系统等提供理论依据.本文首先分析了车辆在双车道公路超车过程中可能发生的碰撞类型,基于可能发生的碰撞类型对超车时间进行分段,分析每一超车时段车辆之间的安全距离,进而建立超车安全距离模型,以等速超车和加速超车为例,选取小型车、中型车、大型车作为前方被超车辆,确定仿真参数,基于MATLAB 软件仿真,分析、验证超车安全距离模型的有效性.得出超车车辆与前方车辆及对向车辆之间的临界安全距离图,为汽车主动安全系统的研发和超车事故的预防提供了理论基础.关键词:交通工程;临界安全距离;控制变量法;超车阶段划分;安全区域;超车安全Safe Distance Model for Overtaking on Two-lane HighwayZHANG Wen-hui,SUN Shu-rui,SU Yong-min(Schoolof Traffic,NortheastForestry University,Harbin 150040,China)Abstract:Traffic accidents induced by improper overtaking on the two-lane highways occur frequently.Thesetraffic accidents tend to cause serious consequences.Therefore,a safe distance model during overtaking is proposed to provide theoretical basis for safe warning devices and assistant judging system.At first,this paper analyzes the types of collision during overtaking on a two-lane highway.The overtaking stage is divided into time segments based on the types of collision.The safe distance between vehicles in every overtaking period is analyzed.Then the safe distance model is established during overtaking.Taking speed remaining and speed increasing as examples,the small,medium and large type of vehicle serves as the leading vehicle respectively.The simulating parameters are input MATLAB to analyze and verify the effectiveness of the safe distance models.Finally,the critical safety distance curves of overtaking vehicle with leading vehicle and opposite vehicle are obtained.The results provide a theoretical basis for developing vehicle active safe system and preventing overtaking accidents.Keywords:traffic engineering;critical safety distance;control variable method;division of overtaking stages;safety zone;overtaking safety0引言双车道公路上超车是较为危险的交通行为,由于要借用对向车道,驾驶人需要观察横向和纵向的车辆,以保持安全距离.如果超车时机选择不当,就可能发生追尾、刮擦或者正碰等交通事故.因此,精确的超车碰撞预警模型对于避免碰撞事故显得尤为重要.Eleni 将超车过程分为变换车道、加速和返回原车道等阶段,利用驾驶模拟的方法分析超车过程持续时间,发现目标车辆和对向车辆的相对速收稿日期:2018-10-16修回日期:2019-01-07录用日期:2019-01-15基金项目:中央高校基本科研业务费专项资金/Fundamental Research Funds for the Central Universities(2572018BG01);国家重点研发计划项目/National Key Research and Development Projects(2017YFC0803901);教育部社会科学研究基金/Social Sciences Research Fund of the Ministry of Education(17YJCZH250).作者简介:张文会(1978-),男,黑龙江哈尔滨人,副教授,博士.*通信作者:rayear@第19卷第2期双车道公路超车安全距离模型度、纵向间距、天气条件和驾驶人性别是超车过程的主要影响因素[1].Amir 等基于临界碰撞时间(Time-to-collision ,TTC)建立了超车距离接受模型,并利用视频数据验证了模型的可行性[2].国内学者游峰等基于双车道公路超车过程中的纵向临界安全距离构建了超车过程中的车辆碰撞预警模型[3];何兆成等基于横向安全距离建立了车辆跟驰模型[4];赵贝贝等结合车载传感器的应用,建立了符合超车辅助判断需要的超车安全距离计算模型[5];吴付威等建立了智能车辆超车过程中的轨迹跟随运动模型,提出智能车辆超车过程中的控制算法[6];许伦辉等根据超车时两车侧向距离的变化,建立了基于车间距及其变化率的模糊控制模型[7].上述研究成果为超车安全研究奠定了一定的理论基础,但较少学者对目标车辆类型及超车车辆速度变化展开详细分析.本文在现有研究的基础上,结合超车过程可能出现的碰撞类型,对超车过程中的超车时间进行了分段,详细分析每个时段的超车安全间距.对匀速超车及保持特定加速度加速超车两种超车类型的超车安全区域的判定进行了仿真演算.1超车阶段划分图1为一个典型的双车道公路超车场景图,车辆在超车过程中与对向车辆和目标车辆均容易发生冲突.图1双向两车道公路典型超车场景图Fig.1Typical overtaking scene of two-way two-lanehighway结合文献[8]对双车道公路超车安全影响因素的研究结果,并考虑超车车辆与目标车辆及对向车辆的相互关系,得到超车过程中可能发生的碰撞类型如图2所示.图2双车道公路超车碰撞类型Fig.2Type of overtaking collision on two-lane highway图2(a)为超车行为开始时车辆与目标车辆的临界安全状态,图2(b)为换道加速返回原车道的临界安全状态,图2(c)为车辆运行过程中偏离车道的状态,图2(d)为超车行为开始时车辆与对向车辆的临界安全状态.本文主要研究驾驶人产生超车意图后,车辆与目标车辆、对向车辆之间的安全距离模型,辅助驾驶人完成感知和判断过程,研究内容集中于超车意图产生后、超车行为发生前的预警,因此,只考虑图2(a)和图2(d)两种碰撞.超车前,驾驶人需要根据目标车辆和对向车辆的行驶速度、车辆间的距离、车流状态及道路条件等情况,判断超车时机.参照文献[9]和[10],假设超车过程中目标车辆和对向车辆的行驶速度保持不变,考虑超车过程中的临界碰撞点对超车时段进行划分,如图3所示,每个时间段的定义如表1所示.图3超车时间段分割图Fig.3Segmentation chart of overtaking period183交通运输系统工程与信息2019年4月表1超车时间段定义表Table1Overtaking period definition table超车时间段t0tpt1t2t3t4t5t6超车时间段定义驾驶人产生超车意图时间(取t0=0)实施超车行为前调整时间开始实施超车时间到达第1个临界碰撞点时间完成换道时间完成超越时间到达第2个临界碰撞点时间完成超车过程时间2超车安全距离模型分析2.1车辆的运动学建模对超车过程的分析中,不能单纯把车辆简化为1个质点,因为车辆的长度和宽度均会影响超车时间,而在实际超车过程中,车辆的高度对超车过程的影响不大,因此,如图4所示,将车辆看成是一个长方形,选取车辆左前角、右前角,右后角,左后角4个点,分别定义为Pi(i=1,2,3,4).文中均以P1点为基准点,定义超车开始阶段即t1时刻,P1点的纵向位移与横向位移都为零,即y0=0,x0=0.超车初期的坐标为(0,0),超车过程中车辆的横向位移为W,完成超车所对应的横向位移最小值取W min=W n+1.5,如图5(a)所示.完成超车时对应的横向位移最大值取车辆的左侧边界与道路边缘线重合的位置,取W max=W lane+W lane-W n2,如图5(b)所示.车辆在位移为W2的时候,横向速度达到最大.图4超车关键点定义Fig.4Definition of overtaking key points图5超车过程车辆运动学分析Fig.5Vehicle kinematics analysis during overtaking2.2车辆与目标车辆的安全距离分析超车车辆与目标车辆发生碰撞的形式有追尾和侧碰两种.在t=t1时刻,车辆产生横向加速度,发生横向位移,t2时刻到达图6所示的临界碰撞位置,B1为碰撞点.图中设BL线为目标车辆左侧的边界线,车辆在t=0时刻实施超车,以横向加速度换道至对向车道.在本文的假设条件下,目标车辆在换道之前保持匀速直线运动,即满足条件:xn+1=0⋂y n+1=0.当车辆以一定的横向加速度穿越BL线时,车辆的右前角点P2易与目标车辆发生碰撞.定义t2-t1为n车到达碰撞点的时间.分析在换道过程中,基于纵向安全距离,避免车辆与目标车辆发生碰撞的安全预警条件为xAB1(t)<x AB(n+1)(t)-l n+1(1)式中:ln+1为车辆长度(m).在实际超车过程中车辆与目标车辆碰撞的临界点是车辆的P2点,考虑车辆几何关系与xAB1、xABn 之间的关系为xAB1=x ABn-w n sin(θ(t)),t∈[t1,t2](2)式中:wn为车辆n宽度(m);θ(t)为车辆在t时刻相对于x 轴的夹角(°).令Sr(t)=x ABn(t)-x AB(n+1)(t)+l n+1+w n sin(θ(t))(3)当t∈[t1,t2]时,只要确保S r(t)>0,车辆与目标车辆就不会发生任何形式的碰撞,即车辆与目标车辆不发生碰撞的初始距离Sr(0)的最小值为两车不发生任何碰撞的最小安全距离MSSn(n+1).184第19卷第2期双车道公路超车安全距离模型图6本车与前车的安全距离图Fig.6Safety distance map between this car and the front carMSS n (n +1)(t )=max{(S r (0)+∫t1t 2∫t 1t 2(x 1n (τ)-x n +1(τ))d τd λ+[v n (0)-v n +1(0)]t +w n sin(θ(t ))+l n +1≥0),0}(4)2.3车辆与对向车辆的安全距离分析换道完成阶段两车的最小安全距离模型为S nm (t 3)≥x CB 4+x m +S a 3(5)图7车辆与对向车辆的超车安全距离Fig.7Safety distance map of overtaking between vehicle and opposite vehicle如图7所示,两车的临界碰撞点在P 4,x AB 1(t ),x CB 4与x CE 的几何关系为x CB 4=x CE -l n cos θ(6)考虑超车时距的情况下,超车车辆与对向车辆之间基于实际测量的最小距离为MSS nm (t 3)=max ìíîïïïïïïïïüýþïïïïïïïïæèççççççççççöø÷÷÷÷÷÷÷÷÷÷∫t 3t 5∫t 1t 3x 1n (τ)d τd λ+∫t 3t 4∫t 3t 4x 2n (τ)d τ+∫t 4t 5∫t 3t 4x 2n (τ)d τ+[v n (0)+v m (0)](t 5-t 3)-w n sin(θ(t ))-l n cos θ+2(v n(0)+v m (0)),0(7)3安全距离计算模型求解3.1车辆以等速进行超车的情况本文选取二级公路作为超车路段的道路模型,以新捷达作为超车车辆模型,根据目标车辆类型确定3组仿真参数如表2所示.表2仿真参数Table 2Simulation parameters参数符号w n l n W lane w m l m w n +1l n +1说明车辆的车宽车辆的车长车道宽对向车辆车宽对向车辆车长目标车辆车宽目标车辆车长仿真参数/m1.74.53.751.74.5小型车中型车大型车小型车中型车大型车 1.72.02.54.77.010.0车辆以等速形式进行超车时,与对向车辆的纵向相对速度始终是常数,即:x n (t )-x n +1(t )≈const MSS n (n +1)=[v n (0)-v n +1(0)](t 2+2)+1.7sin(5)+l n +1,v n (0)-v n +1(0)∈[6,18]m/s(8)分别确定目标车辆为小型车、中型车、大型车,确定加速度为1m/s 2,得出车辆与目标车辆之间的最小安全距离如图8所示.185交通运输系统工程与信息2019年4月由于车辆保持匀速运动,纵向速度保持不变,即v n (0)+v m (0)≈const ,且此时x n =0,基于超车时距可得,车辆与对向车辆不发生碰撞的条件可以简化为MSS nm (t 3)=[v n (0)+v m (0)](t 5-t 3)+S a 3(9)选取小型车、中型车、大型车,给定最大加速度为1m/s 2,车辆与目标车辆的相对速度为3m/s ,得到车辆与对向车辆相对速度对相对距离的影响如图9所示.图8等速超车车辆与目标车辆的安全距离Fig.8Safe distance between vehicle and target vehicle under constant speed overtaking图9等速超车车辆与对向车辆的安全距离Fig.9Safe distance between vehicle and opposite vehicleunder constant speed overtaking3.2车辆以特定加速度进行超车的情况车辆以特定加速度进行超车,其加速时间为t 4,在换道阶段为了安全起见,其加速度仅使车辆产生横向位移,纵向速度保持不变,因此,加速超车的纵向加速时间从t 3时刻开始,加速阶段发生于对向车道,行驶速度过快或时间过长都会影响其行驶安全性.由于加速阶段的加速度是一个先平缓增大后平缓减小的变换形式,并且是连续变化的,其变化形式类似于sin 函数,文中参考sin 函数的加速度控制策略,如图10所示,最大加速度为a max ,加速时间为t 4-t 3.基于仿真参数确定车辆与目标车辆的安全距离为MSS n (n +1)=[v n (0)-v n +1(0)](t 2+2)+1.7sin(5)+l n +1,-6≤v n (0)-v n +1(0)≤6(10)选取目标车辆车型为小型车、中型车、大型车,选取换道过程加速度为1m/s 2,得到加速超车时,车辆与目标车辆的安全距离与相对速度的关系如图11所示.图10正弦函数加速度控制策略Fig.10Sine function acceleration control strategy图11加速超车下车辆与目标车辆的安全距离Fig.11Safe distance between vehicle and target vehicleunder accelerated overtaking选择加速超车形式进行超车时,由于车辆在换道超越及并道阶段均存在加速度,因此超车车辆与对向来车之间的安全距离与换道阶段、超越阶段及并道阶段的加速度均有关系,且由于超越阶段的超车时间与超车车辆与目标车辆之间的相对速度相关,因此,车辆与对向来车在采用加速超车形式超车时,两车之间安全距离的影响因素有:车辆之间的相对速度,车辆与对向来车的相对速度,以及换道、超越、并道阶段的加速度.MSS nm (t 3)=(t 4-t 3)2πα+[v n (0)+v m (0)](t 5-t 3+2)-4.5cos 5-1.7sin 5(11)由于变化量过多,本文采取控制变量的方法进行分析,取车辆的最大加速度a max =1m/s 2,可确186第19卷第2期双车道公路超车安全距离模型定换道结束的时间t 3=4s ,选取目标车辆为小型车、中型车、大型车,确定车辆与对向车辆的相对速度为17m/s ,得到加速超车时车辆与对向车辆的安全距离图如图12(a)所示;确定车辆与目标车辆的相对速度为6m/s ,得到加速超车时车辆与对向车辆的安全距离图如图12(b)所示.(a)相对速度为17m/s(b)相对速度为6m/s图12加速超车下车辆与对向车辆的安全距离Fig.12Safe distance between vehicle and opposite vehicleunder accelerated overtaking4结论驾驶员在双车道公路上进行超车时,需根据车速、车辆横向间距与纵向间距及车流情况适时调整驾驶策略以完成超车行为或者终止超车行为.在短时间内要进行如此复杂的判定与决策,驾驶员极有可能产生误判而引发事故.本文提出了保障超车安全的预警算法,分析了双车道公路超车过程中可能发生的典型碰撞类型,基于碰撞临界点对超车时间进行了划分;进而建立了考虑车辆横向间距与纵向间距的超车安全模型,同时考虑了超车时距,将车辆看作一个具有长和宽的矩形,定义了车辆的几何关系,提出超车过程中的预警方法;最后选取小型车、中型车、大型车3类车作为前方被超车辆,对算法进行了仿真分析,分别得出在等速超车及以特定加速度加速超车的情况下,超车车辆与前方车辆及对向车辆之间的临界安全距离.超车安全距离模型有助于驾驶人正确感知目标车辆和对向车辆的运动状态,完成超车安全辅助决策,为智能车辆主动安全系统的设计提供理论依据,当车辆与目标车辆和对向车辆的相对距离小于理论安全间距时,辅助系统可产生预警,并改变车辆的运动状态,避免交通事故.此外,研究结果也可为车流量较大、车速较高的特殊路段进行超车安全管理提供参考和借鉴.参考文献:[1]ELENI I V.Modeling duration of overtaking in two lanehighways[J].Transportation Research Part F,2013(20):135-146.[2]AMIR H G,FRANK F S.Development and evaluation of a microscopic overtaking gap acceptance model for two-lane highways[J].Canadian Journal of Civil Engineering,2016,43(6):573-581.[3]游峰,张荣辉,王海玮,等.基于纵向安全距离的超车安全预警模型[J].华南理工大学学报(自然科学版),2013(8):87-92.[YOU F,ZHANG R H,WANG H W,et al.Overtaking safety warning model based on longitudinal safety distance[J].Journal of South China University of Technology (Natural Science Edition),2013(8):87-92.][4]何兆成,孙文博.考虑横向分离与超车期望的车辆跟驰模型[J].物理学报,2013,62(16):168-174.[HE Z C,SUN W B.Vehicle following model considering lateral separation and overtaking expectation[J].Journal of Physics,2013,62(16):168-174.][5]赵贝贝,李文勇,侯秀喆.基于车载传感器的超车安全距离模型的研究[J].装备制造技术,2012(12):8-9.[ZHAO B B,LI W Y,HOU X Z.Research on overtaking safety distance model based on on-board sensor[J].Equipment Manufacturing Technology,2012(12):8-9.][6]吴付威,秦加合,任超伟,等.高速公路智能汽车自动超车控制算法仿真研究[J].计算机工程与设计,2013(7):2542-2546.[WU F W,QIN J H,REN C W,et al.Simulation research on automatic overtaking control algorithm of intelligent vehicles on expressways[J].Computer Engineering and Design,2013(7):2542-2546.][7]许伦辉,胡三根,伍帅,等.考虑车辆运行特性的双车道超车模型[J].华南理工大学学报(自然科学版),2015(4):7-13.[XU L H,HU S G,WU S,et al.Two-lane overtaking model considering vehicle running characteristics[J].Journal of South China University of187交通运输系统工程与信息2019年4月Technology(Natural Science Edition),2015(4):7-13.] [8]张文会,马俊.双车道公路超车危险因素辨识[J].森林工程,2017,33(3):89-93.[ZHANG W H,MA J.Theidentification of overtaking risk factors on two lanehighways[J].Forest Engineering,2017,33(3):89-93.] [9]唐铁桥,黄海军,梅超群.一种改进的超车模型[J].交通运输系统工程与信息,2005,5(4):23-25.[TANG TQ,HUANG H J,MEI C Q.An improved overtakingmodel[J].Journal of Transportation Systems Engineeringand Information Technology,2005,5(4):23-25.] [10]许伦辉,胡三根,伍帅,等.考虑车辆运行特性的双车道超车模型[J].华南理工大学学报(自然科学版),2015,43(4):7-13.[XU L H,HU S G,WU S,et al.Overtaking model for two-lane highway consideringvehicle running characteristics[J].Journal of SouthChina University of Technology,2015,43(4):7-13.]上接第181页[2]JIANG X B,WANG W H.Drivers'effective deceleratingzone in an urban vehicle-pedestrian conflict situation:observational studies and analyses[J].TransportationResearch Part D,2018(5):76-84.[3]张存保,陈峰.无信号控制路段手机对行人过街行为和安全的影响[J].交通运输系统工程与信息,2018,18(4):136-141.[ZHANG C B,CHEN F.Effects of cellphone on pedestrian crossing behavior and safety inunsignalized road sections[J].Journal of TransportationSystems Engineering and Information,2018,18(4):136-141.][4]WANG Y,PENG Z Y.Simulated interactions ofpedestrian crossings and motorized vehicles inresidential areas[J].Physical A,2017(10):490-497.[5]ZHUANG X,WU C.The safety margin and perceivedsafety of pedes-trians at unmarked roadway[J].Transportation Research Part F,2012,15(2):119-131.[6]SVENSSONÅ,HYDÉN C.Estimating the severity ofsafety related behavior[J].Accident Analysis andPrevention,2006,38(2):379-385.[7]GRAYSON G B.The Malmöstudy:a calibration of trafficconflict techniques[C].A Study Organised by ICTCT(The International Committee on Traffic ConflictTechniques),1984:8-12.[8]HARKEY D L,REINFURT D W,KNUIMAN M.Development of the bicycle compatibility index[R].Transportation Research Record1636,TRB,NationalResearch Council,Washington,D.C.,1998:13-20. [9]宗芳,许洪国,张慧永.基于Ordered Probit模型的交通事故受伤人数预测[J].华南理工大学学报(自然科学版),2012(7):41-46.[ZONG F,XU H G,ZHANG H Y.Prediction of traffic accident injuries based on OrderedProbit model[J].Journal of South China University ofTechnology(Natural Science),2012(7):41-46.] [10]周钊,谭莉.成都市城市道路行人交通特性研究[J].交通节能与环保,2017(6):27-30.[ZHOU Z,TAN L.Pedestrian traffic characteristics of urban road inChengdu[J].Traffic Energy Conservation andEnvironmental Protection,2017(6):27-30.]188。


汽车安全距离问题的研究XXX,XXX,XXX(江苏大学理学院数师1102)摘要:将同向行驶的两辆车的车速、驾驶人的反应快慢以及天气、路况好坏,是否平路、坡路等因素结合起来,运用运动学分析方法,建立汽车刹车距离的数学模型,研究汽车安全距离问题,并讨论最新公布的《道路交通安全法》和《道路交通安全法实施条例》中部分规定(关于对车速、安全车距)的合理性。
关键词:安全距离;运动学分析;刹车模型;驾驶员在驾驶机动车过程中难免会遇到突发事件而被迫紧急停车,致使尾随其后的车辆极易发生追尾事故。
刹车距离与车速有很大关系,发生追尾事故与后车的跟车距离也有很大关系。
此外,驾驶人的反应快慢以及天气、路况好坏,是否平路、坡路等因素,也会影响刹车距离。
一、实际问题最新公布的《道路交通安全法》和《道路交通安全法实施条例》对车速、安全车距以及影响驾驶人反应快慢等因素均有详细规定。
以下摘取几条:1)机动车驾驶人饮酒、服用国家管制的精神药品或者麻醉药品,或者患有妨碍安全驾驶机动车的疾病,或者过度疲劳影响安全驾驶的,不得驾驶机动车。
2)机动车在道路上行驶不得超过限速标志、标线标明的速度。
在没有限速标志、标线的道路上,机动车不得超过下列最高行驶速度:(一)没有道路中心线的道路,城市道路为每小时30公里,公路为每小时40公里;(二)同方向只有1条机动车道的道路,城市道路为每小时50公里,公路为每小时70公里。
3)机动车在高速公路上发生故障时,驾驶人应当持续开启危险报警闪光灯,并在来车方向150米以外设置警告标志等措施扩大示警距离。
4)在高速公路上行驶的小型载客汽车最高车速不得超过每小时120公里,其他机动车不得超过每小时100公里,摩托车不得超过每小时80公里。
最低车速不得低于每小时60公里。
5)机动车在高速公路上行驶,车速超过每小时100公里时,应当与同车道前车保持100米以上的距离,车速低于每小时100公里时,与同车道前车距离可以适当缩短,但最小距离不得少于50米。
双车道公路超车安全距离模型张文会;孙舒蕊;苏永民【摘要】双车道公路上因超车不当而导致交通事故频发且后果多较为严重,故提出超车安全距离模型,旨在为超车安全预警装置、超车辅助判断系统等提供理论依据.本文首先分析了车辆在双车道公路超车过程中可能发生的碰撞类型,基于可能发生的碰撞类型对超车时间进行分段,分析每一超车时段车辆之间的安全距离,进而建立超车安全距离模型,以等速超车和加速超车为例,选取小型车、中型车、大型车作为前方被超车辆,确定仿真参数,基于MATLAB软件仿真,分析、验证超车安全距离模型的有效性.得出超车车辆与前方车辆及对向车辆之间的临界安全距离图,为汽车主动安全系统的研发和超车事故的预防提供了理论基础.【期刊名称】《交通运输系统工程与信息》【年(卷),期】2019(019)002【总页数】7页(P182-188)【关键词】交通工程;临界安全距离;控制变量法;超车阶段划分;安全区域;超车安全【作者】张文会;孙舒蕊;苏永民【作者单位】东北林业大学交通学院,哈尔滨150040;东北林业大学交通学院,哈尔滨150040;东北林业大学交通学院,哈尔滨150040【正文语种】中文【中图分类】U491.30 引言双车道公路上超车是较为危险的交通行为,由于要借用对向车道,驾驶人需要观察横向和纵向的车辆,以保持安全距离.如果超车时机选择不当,就可能发生追尾、刮擦或者正碰等交通事故.因此,精确的超车碰撞预警模型对于避免碰撞事故显得尤为重要.Eleni 将超车过程分为变换车道、加速和返回原车道等阶段,利用驾驶模拟的方法分析超车过程持续时间,发现目标车辆和对向车辆的相对速度、纵向间距、天气条件和驾驶人性别是超车过程的主要影响因素[1].Amir 等基于临界碰撞时间(Time-to-collision,TTC)建立了超车距离接受模型,并利用视频数据验证了模型的可行性[2].国内学者游峰等基于双车道公路超车过程中的纵向临界安全距离构建了超车过程中的车辆碰撞预警模型[3];何兆成等基于横向安全距离建立了车辆跟驰模型[4];赵贝贝等结合车载传感器的应用,建立了符合超车辅助判断需要的超车安全距离计算模型[5];吴付威等建立了智能车辆超车过程中的轨迹跟随运动模型,提出智能车辆超车过程中的控制算法[6];许伦辉等根据超车时两车侧向距离的变化,建立了基于车间距及其变化率的模糊控制模型[7].上述研究成果为超车安全研究奠定了一定的理论基础,但较少学者对目标车辆类型及超车车辆速度变化展开详细分析.本文在现有研究的基础上,结合超车过程可能出现的碰撞类型,对超车过程中的超车时间进行了分段,详细分析每个时段的超车安全间距.对匀速超车及保持特定加速度加速超车两种超车类型的超车安全区域的判定进行了仿真演算.1 超车阶段划分图1为一个典型的双车道公路超车场景图,车辆在超车过程中与对向车辆和目标车辆均容易发生冲突.图1 双向两车道公路典型超车场景图Fig.1 Typical overtaking scene of two-way two-lane highway结合文献[8]对双车道公路超车安全影响因素的研究结果,并考虑超车车辆与目标车辆及对向车辆的相互关系,得到超车过程中可能发生的碰撞类型如图2所示. 图2 双车道公路超车碰撞类型Fig.2 Type of overtaking collision on two-lane highway图2(a)为超车行为开始时车辆与目标车辆的临界安全状态,图2(b)为换道加速返回原车道的临界安全状态,图2(c)为车辆运行过程中偏离车道的状态,图2(d)为超车行为开始时车辆与对向车辆的临界安全状态.本文主要研究驾驶人产生超车意图后,车辆与目标车辆、对向车辆之间的安全距离模型,辅助驾驶人完成感知和判断过程,研究内容集中于超车意图产生后、超车行为发生前的预警,因此,只考虑图2(a)和图2(d)两种碰撞.超车前,驾驶人需要根据目标车辆和对向车辆的行驶速度、车辆间的距离、车流状态及道路条件等情况,判断超车时机.参照文献[9]和[10],假设超车过程中目标车辆和对向车辆的行驶速度保持不变,考虑超车过程中的临界碰撞点对超车时段进行划分,如图3 所示,每个时间段的定义如表1所示.图3 超车时间段分割图Fig.3 Segmentation chart of overtaking period表1 超车时间段定义表Table 1 Overtaking period definition table超车时间段t0 tp t1 t2 t3 t4 t5 t6超车时间段定义驾驶人产生超车意图时间(取t0=0)实施超车行为前调整时间开始实施超车时间到达第1个临界碰撞点时间完成换道时间完成超越时间到达第2个临界碰撞点时间完成超车过程时间2 超车安全距离模型分析2.1 车辆的运动学建模对超车过程的分析中,不能单纯把车辆简化为1个质点,因为车辆的长度和宽度均会影响超车时间,而在实际超车过程中,车辆的高度对超车过程的影响不大,因此,如图4所示,将车辆看成是一个长方形,选取车辆左前角、右前角,右后角,左后角4个点,分别定义为Pi(i=1,2,3,4).文中均以P1点为基准点,定义超车开始阶段即t1时刻,P1点的纵向位移与横向位移都为零,即y0=0,x0=0.超车初期的坐标为(0,0),超车过程中车辆的横向位移为W,完成超车所对应的横向位移最小值取Wmin=Wn+1.5,如图5(a)所示.完成超车时对应的横向位移最大值取车辆的左侧边界与道路边缘线重合的位置,取,如图5(b)所示.车辆在位移为的时候,横向速度达到最大.图4 超车关键点定义Fig.4 Definition of overtaking key points图5 超车过程车辆运动学分析Fig.5 Vehicle kinematics analysis during overtaking2.2 车辆与目标车辆的安全距离分析超车车辆与目标车辆发生碰撞的形式有追尾和侧碰两种.在t=t1时刻,车辆产生横向加速度,发生横向位移,t2时刻到达图6所示的临界碰撞位置,B1为碰撞点.图中设BL线为目标车辆左侧的边界线,车辆在t=0时刻实施超车,以横向加速度换道至对向车道.在本文的假设条件下,目标车辆在换道之前保持匀速直线运动,即满足条件:当车辆以一定的横向加速度穿越BL线时,车辆的右前角点P2易与目标车辆发生碰撞.定义t2-t1为n车到达碰撞点的时间.分析在换道过程中,基于纵向安全距离,避免车辆与目标车辆发生碰撞的安全预警条件为式中:ln+1为车辆长度(m).在实际超车过程中车辆与目标车辆碰撞的临界点是车辆的P2点,考虑车辆几何关系与xAB1、xABn之间的关系为式中:wn为车辆n宽度(m);θ(t)为车辆在t时刻相对于x轴的夹角(°).令当t ∈[t1,t2]时,只要确保Sr(t)>0,车辆与目标车辆就不会发生任何形式的碰撞,即车辆与目标车辆不发生碰撞的初始距离Sr(0)的最小值为两车不发生任何碰撞的最小安全距离MSSn(n+1).图6 本车与前车的安全距离图Fig.6 Safety distance map between this car and the front car2.3 车辆与对向车辆的安全距离分析换道完成阶段两车的最小安全距离模型为图7 车辆与对向车辆的超车安全距离Fig.7 Safety distance map of overtaking between vehicle and opposite vehicle如图7 所示,两车的临界碰撞点在P4,xAB1(t),xCB4与xCE的几何关系为考虑超车时距的情况下,超车车辆与对向车辆之间基于实际测量的最小距离为3 安全距离计算模型求解3.1 车辆以等速进行超车的情况本文选取二级公路作为超车路段的道路模型,以新捷达作为超车车辆模型,根据目标车辆类型确定3组仿真参数如表2所示.表2 仿真参数Table 2 Simulation parameters参数符号wn ln Wlane wm lm wn+1 ln+1说明车辆的车宽车辆的车长车道宽对向车辆车宽对向车辆车长目标车辆车宽目标车辆车长仿真参数/m 1.7 4.5 3.75 1.7 4.5小型车中型车大型车小型车中型车大型车1.7 2.0 2.5 4.7 7.0 10.0车辆以等速形式进行超车时,与对向车辆的纵向相对速度始终是常数,即:分别确定目标车辆为小型车、中型车、大型车,确定加速度为1 m/s2,得出车辆与目标车辆之间的最小安全距离如图8所示.由于车辆保持匀速运动,纵向速度保持不变,即vn(0)+vm(0)≈const,且此时x¨ n=0,基于超车时距可得,车辆与对向车辆不发生碰撞的条件可以简化为选取小型车、中型车、大型车,给定最大加速度为1 m/s2,车辆与目标车辆的相对速度为3 m/s,得到车辆与对向车辆相对速度对相对距离的影响如图9所示. 图8 等速超车车辆与目标车辆的安全距离Fig.8 Safe distance between vehicle and target vehicle under constant speed overtaking图9 等速超车车辆与对向车辆的安全距离Fig.9 Safe distance between vehicle and opposite vehicle under constant speed overtaking3.2 车辆以特定加速度进行超车的情况车辆以特定加速度进行超车,其加速时间为t4,在换道阶段为了安全起见,其加速度仅使车辆产生横向位移,纵向速度保持不变,因此,加速超车的纵向加速时间从t3时刻开始,加速阶段发生于对向车道,行驶速度过快或时间过长都会影响其行驶安全性.由于加速阶段的加速度是一个先平缓增大后平缓减小的变换形式,并且是连续变化的,其变化形式类似于sin函数,文中参考sin函数的加速度控制策略,如图10所示,最大加速度为amax,加速时间为t4-t3.基于仿真参数确定车辆与目标车辆的安全距离为选取目标车辆车型为小型车、中型车、大型车,选取换道过程加速度为1 m/s2,得到加速超车时,车辆与目标车辆的安全距离与相对速度的关系如图11所示.图10 正弦函数加速度控制策略Fig.10 Sine function acceleration control strategy图11 加速超车下车辆与目标车辆的安全距离Fig.11 Safe distance between vehicle and target vehicle under accelerated overtaking选择加速超车形式进行超车时,由于车辆在换道超越及并道阶段均存在加速度,因此超车车辆与对向来车之间的安全距离与换道阶段、超越阶段及并道阶段的加速度均有关系,且由于超越阶段的超车时间与超车车辆与目标车辆之间的相对速度相关,因此,车辆与对向来车在采用加速超车形式超车时,两车之间安全距离的影响因素有:车辆之间的相对速度,车辆与对向来车的相对速度,以及换道、超越、并道阶段的加速度.由于变化量过多,本文采取控制变量的方法进行分析,取车辆的最大加速度amax=1 m/s2,可确定换道结束的时间t3=4 s,选取目标车辆为小型车、中型车、大型车,确定车辆与对向车辆的相对速度为17 m/s,得到加速超车时车辆与对向车辆的安全距离图如图12(a)所示;确定车辆与目标车辆的相对速度为6 m/s,得到加速超车时车辆与对向车辆的安全距离图如图12(b)所示.图12 加速超车下车辆与对向车辆的安全距离Fig.12 Safe distance between vehicle and opposite vehicle under accelerated overtaking4 结论驾驶员在双车道公路上进行超车时,需根据车速、车辆横向间距与纵向间距及车流情况适时调整驾驶策略以完成超车行为或者终止超车行为.在短时间内要进行如此复杂的判定与决策,驾驶员极有可能产生误判而引发事故.本文提出了保障超车安全的预警算法,分析了双车道公路超车过程中可能发生的典型碰撞类型,基于碰撞临界点对超车时间进行了划分;进而建立了考虑车辆横向间距与纵向间距的超车安全模型,同时考虑了超车时距,将车辆看作一个具有长和宽的矩形,定义了车辆的几何关系,提出超车过程中的预警方法;最后选取小型车、中型车、大型车3类车作为前方被超车辆,对算法进行了仿真分析,分别得出在等速超车及以特定加速度加速超车的情况下,超车车辆与前方车辆及对向车辆之间的临界安全距离.超车安全距离模型有助于驾驶人正确感知目标车辆和对向车辆的运动状态,完成超车安全辅助决策,为智能车辆主动安全系统的设计提供理论依据,当车辆与目标车辆和对向车辆的相对距离小于理论安全间距时,辅助系统可产生预警,并改变车辆的运动状态,避免交通事故.此外,研究结果也可为车流量较大、车速较高的特殊路段进行超车安全管理提供参考和借鉴.【相关文献】[1]ELENI I V. Modeling duration of overtaking in two lane highways[J]. Transportation Research Part F, 2013(20):135-146.[2]AMIR H G,FRANK F S. Development and evaluation of a microscopic overtaking gap acceptance model for two-lane highways[J]. Canadian Journal of CivilEngineering,2016,43(6):573-581.[3]游峰,张荣辉,王海玮,等.基于纵向安全距离的超车安全预警模型[J]. 华南理工大学学报(自然科学版),2013(8): 87-92. [YOU F, ZHANG R H, WANG H W,et al. Overtaking safety warning model based on longitudinal safety distance[J]. Journal of South China University of Technology(Natural Science Edition),2013(8):87-92.][4]何兆成,孙文博.考虑横向分离与超车期望的车辆跟驰模型[J].物理学报,2013,62(16):168-174.[HE Z C,SUN W B. Vehicle following model considering lateral separation and overtakingexpectation[J]. Journal of Physics,2013, 62(16):168-174.][5]赵贝贝,李文勇,侯秀喆.基于车载传感器的超车安全距离模型的研究[J]. 装备制造技术, 2012(12): 8-9.[ZHAO B B,LI W Y,HOU X Z.Research on overtaking safety distance model based on on-board sensor[J].Equipment Manufacturing Technology,2012(12):8-9.][6]吴付威,秦加合,任超伟,等.高速公路智能汽车自动超车控制算法仿真研究[J].计算机工程与设计,2013(7): 2542-2546. [WU F W, QIN J H, REN C W, et al.Simulation research on automatic overtaking control algorithm of intelligent vehicles onexpressways[J].Computer Engineering and Design, 2013(7): 2542-2546.][7]许伦辉,胡三根,伍帅,等.考虑车辆运行特性的双车道超车模型[J]. 华南理工大学学报(自然科学版),2015(4): 7-13. [XU L H, HU S G, WU S, et al. Twolane overtaking model considering vehicle running characteristics[J]. Journal of South China University of Technology(Natural Science Edition),2015(4):7-13.][8]张文会,马俊.双车道公路超车危险因素辨识[J].森林工程, 2017, 33(3): 89-93. [ZHANG W H, MA J. The identification of overtaking risk factors on two lane highways[J].Forest Engineering,2017,33(3):89-93.][9]唐铁桥,黄海军,梅超群.一种改进的超车模型[J].交通运输系统工程与信息,2005,5(4):23-25.[TANG T Q, HUANG H J, MEI C Q. An improved overtaking model[J]. Journal of Transportation Systems Engineering and Information Technology,2005,5(4):23-25.] [10]许伦辉,胡三根,伍帅,等.考虑车辆运行特性的双车道超车模型[J]. 华南理工大学学报(自然科学版),2015, 43(4): 7-13. [XU L H, HU S G, WU S, et al.Overtaking model for two-lane highway considering vehicle running characteristics[J]. Journal of South China University of Technology,2015,43(4):7-13.]。