控制工程基础习题解答2
- 格式:doc
- 大小:588.50 KB
- 文档页数:16
习 题2.1 什么是线性系统?其最重要的特性是什么?下列用微分方程表示的系统中,x o 表示系统输出,x i 表示系统输入,哪些是线性系统? (1) x x x x x ioooo 222=++ (2) x tx x xiooo222=++ (3) x x x xio 222oo=++ (4) x tx x x xiooo222o=++ 解: 凡是能用线性微分方程描述的系统就是线性系统。
线性系统的一个最重要特性就是它满足叠加原理。
该题中(2)和(3)是线性系统。
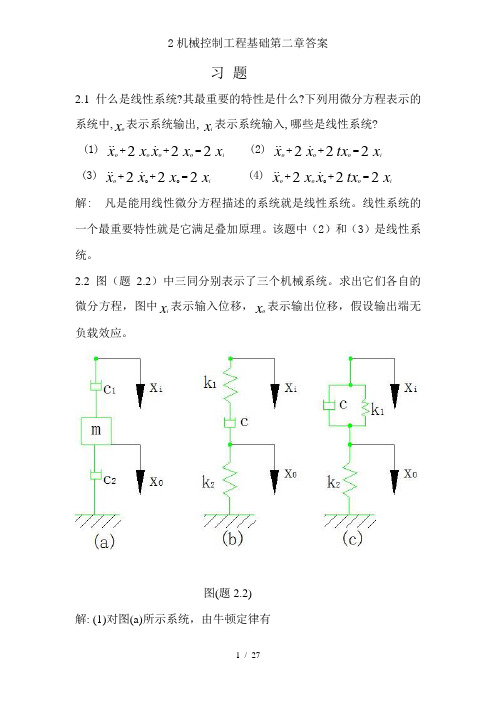
2.2 图(题2.2)中三同分别表示了三个机械系统。
求出它们各自的微分方程,图中x i 表示输入位移,x o 表示输出位移,假设输出端无负载效应。
图(题2.2) 解: (1)对图(a)所示系统,由牛顿定律有xm x c x x c ioo2o1)(=-- 即x c x c c xm i121oo )(=++ (2)对图(b)所示系统,引入一中间变量x,并由牛顿定律有)1()()(1x xc k x x oi-=- )2()(2x k x xc oo=-消除中间变量有x ck x k k xk k c io121o21)(=-- (3)对图(c)所示系统,由牛顿定律有 x k x x k x xc ooioi21)()(=-+-即x k x c x k k xc iioo121)(+=++ 2.3求出图(题2.3)所示电系统的微分方程。
图(题2.3)解:(1)对图(a)所示系统,设i 1为流过R 1的电流,i 为总电流,则有⎰+=idt Ci R u o122i R u u o i 11=-dti i Cu u oi)(111⎰-=-消除中间变量,并化简有u R C u CC R R uR C u R C u C C R R u R C iiiooo12211221222121211)()1(1+++=-+++(2)对图(b)所示系统,设i 为电流,则有⎰++=idtC i R u u oi111⎰+=i R idt Cu o221 消除中间变量,并化简有u Cu R u C C u R R iioo2221211)11()(+=+++2.4 求图(题2.4)所示机械系统的微分方程。

习 题2.1 什么是线性系统其最重要的特性是什么下列用微分方程表示的系统中,x o 表示系统输出,x i 表示系统输入,哪些是线性系统 (1) x x x x x ioooo 222=++&&& (2) x tx x xiooo222=++&&& (3) x x x x io222oo=++&&& (4) x tx x x xiooo222o=++&&& 解: 凡是能用线性微分方程描述的系统就是线性系统。
线性系统的一个最重要特性就是它满足叠加原理。
该题中(2)和(3)是线性系统。
2.2 图(题2.2)中三同分别表示了三个机械系统。
求出它们各自的微分方程,图中x i 表示输入位移,x o 表示输出位移,假设输出端无负载效应。
图(题2.2) 解: (1)对图(a)所示系统,由牛顿定律有 即xc x c c x m i&&&&121oo )(=++ (2)对图(b)所示系统,引入一中间变量x,并由牛顿定律有 消除中间变量有(3)对图(c)所示系统,由牛顿定律有 即x k x c x k k x c iioo121)(+=++&&2.3求出图(题2.3)所示电系统的微分方程。
图(题2.3)解:(1)对图(a)所示系统,设i 1为流过R 1的电流,i 为总电流,则有 消除中间变量,并化简有u R C u CC R R u R C u R C u C C R R u R C iiiooo12211221222121211)()1(1+++=-+++&&&&&&&(2)对图(b)所示系统,设i 为电流,则有 消除中间变量,并化简有2.4 求图(题2.4)所示机械系统的微分方程。
图中M 为输入转矩,C m 为圆周阻尼,J 为转动惯量。
For personal use only in study andresearch; not for commercial use习 题2.1 什么是线性系统?其最重要的特性是什么?下列用微分方程表示的系统中,x o 表示系统输出,x i 表示系统输入,哪些是线性系统? (1) x x x x x ioooo 222=++ (2) x tx x xiooo222=++ (3) x x x xio 222oo=++ (4) x tx x x xiooo222o=++ 解: 凡是能用线性微分方程描述的系统就是线性系统。
线性系统的一个最重要特性就是它满足叠加原理。
该题中(2)和(3)是线性系统。
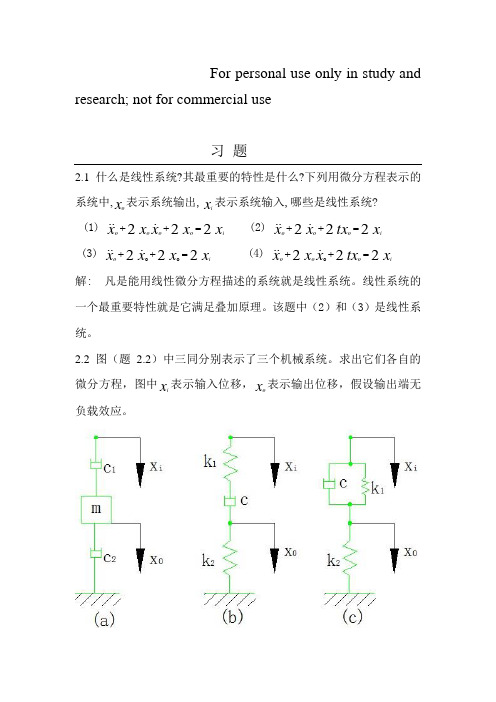
2.2 图(题2.2)中三同分别表示了三个机械系统。
求出它们各自的微分方程,图中x i 表示输入位移,x o 表示输出位移,假设输出端无负载效应。
图(题2.2) 解: (1)对图(a)所示系统,由牛顿定律有 xm x c x x c ioo2o1)(=-- 即x c x c c xm i121oo )(=++ (2)对图(b)所示系统,引入一中间变量x,并由牛顿定律有)1()()(1x xc k x x oi-=- )2()(2x k x xc oo=-消除中间变量有x ck x k k xk k c io121o21)(=-- (3)对图(c)所示系统,由牛顿定律有 x k x x k x xc ooioi21)()(=-+-即x k x c x k k xc iioo121)(+=++ 2.3求出图(题2.3)所示电系统的微分方程。
图(题2.3)解:(1)对图(a)所示系统,设i 1为流过R 1的电流,i 为总电流,则有⎰+=idt Ci R u o122i R u u o i 11=-dt i i Cu u oi )(111⎰-=-消除中间变量,并化简有u R C u CC R R uR C u R C u C C R R u R C iiiooo12211221222121211)()1(1+++=-+++(2)对图(b)所示系统,设i 为电流,则有⎰++=idtC i R u u oi111⎰+=i R idt Cu o221 消除中间变量,并化简有u Cu R u C C u R R iioo2221211)11()(+=+++2.4 求图(题2.4)所示机械系统的微分方程。

控制工程基础课后习题及答案下面是控制工程基础课后习题及答案的一个示例,供参考。
1.什么是控制工程?答:控制工程是一门研究如何设计、分析和实现控制系统的工程学科。
它涉及到自动控制理论、系统建模、信号处理、电路设计等多个领域。
2.控制系统的基本组成部分有哪些?答:控制系统的基本组成部分包括传感器、执行器、控制器和反馈系统。
传感器用于获取被控对象的状态信息,执行器用于实现控制指令,控制器用于生成控制指令,反馈系统用于将被控对象的输出信息反馈给控制器进行调节。
3.什么是开环控制系统和闭环控制系统?答:开环控制系统是指控制器的输出不受被控对象输出的影响,只根据预先设定的控制指令进行控制。
闭环控制系统是指控制器的输出根据被控对象的输出进行调节,通过反馈系统实现控制。
4.请简述PID控制器的工作原理。
答:PID控制器是一种常用的控制器,其工作原理基于对误差信号进行比例、积分和微分处理。
比例项根据误差的大小产生控制指令,积分项根据误差的累积产生控制指令,微分项根据误差的变化率产生控制指令。
PID控制器的输出是这三个项的加权和。
5.什么是控制系统的稳定性?答:控制系统的稳定性指的是在系统输入变化或外部干扰的情况下,系统输出能够保持在可接受范围内的能力。
稳定的控制系统可以实现良好的跟踪性能和抗干扰能力。
6.如何评价一个控制系统的稳定性?答:一个控制系统的稳定性可以通过判断系统的极点位置来评价。
如果系统的所有极点都位于左半平面,则系统是稳定的;如果系统存在极点位于右半平面,则系统是不稳定的。
7.什么是系统的过渡过程和稳定过程?答:系统的过渡过程指的是系统从初始状态到稳定状态的过程,包括系统的响应时间、超调量等性能指标。
系统的稳定过程指的是系统在达到稳定状态之后的行为,包括稳态误差、稳定精度等性能指标。
8.如何设计一个稳定的控制系统?答:设计一个稳定的控制系统需要满足系统的稳定性条件,例如极点位置的要求。
可以通过选择合适的控制器参数、采用合适的控制策略等方式来实现系统的稳定性。

《控制工程基础》练习题及答案1. 单选题1. 作为控制系统,一般()。
A. 开环不振荡B. 闭环不振荡C. 开环一定振荡D. 闭环一定振荡正确答案:A2. 串联相位滞后校正通常用于()。
A. 提高系统的快速性B. 提高系统的稳态精度C. 减少系统的阻尼D. 减少系统的固有频率正确答案:B3. 下列串联校正装置的传递函数中,能在频率ωc=4处提供最大相位超前角的是()。
A. (4s+1)/(s+1)B. (s+1)/(4s+1)C. (0.1s+1)/(0.625s+1)D. (0.625s+1)/(0.1s+1)正确答案:D4. 利用乃奎斯特稳定性判据判断系统的稳定性时,Z=P-N中的Z表示意义为()。
A. 开环传递函数零点在S左半平面的个数B. 开环传递函数零点在S右半平面的个数C. 闭环传递函数零点在S右半平面的个数D. 闭环特征方程的根在S右半平面的个数正确答案:D5. 某环节的传递函数为G(s)=Ts+1,它是()。
A. 积分环节B. 微分环节C. 一阶积分环节D. 一阶微分环节正确答案:D6. 单位反馈控制系统的开环传递函数为G(s)=4/s(s+5) ,则系统在r(t)=2t输入作用下,其稳态误差为()。
A. 10/4B. 5/4C. 4/5D. 0正确答案:A7. 已知系统的开环传递函数为100/S2(0.1S+1)(5S+4),则系统的开环增益以及型次为()。
A. 25,Ⅱ型B. 100,Ⅱ型C. 100,Ⅰ型D. 25,O型正确答案:A8. 控制论的中心思想是()。
A. 一门即与技术科学又与基础科学紧密联系的边缘科学B. 通过信息的传递、加工处理和反馈来进行控制C. 抓住一切通讯和控制系统所共有的特点D. 对生产力的发展、生产率的提高具有重大影响正确答案:B9. 反馈控制系统是指系统中有()。
A. 反馈回路B. 惯性环节C. 积分环节D. PID调节器正确答案:A10. 下面因素中,与系统稳态误差无关的是()。

习 题什么是线性系统其最重要的特性是什么下列用微分方程表示的系统中,x o 表示系统输出,x i 表示系统输入,哪些是线性系统 (1) x x x x x ioooo 222=++&&& (2) x tx x xiooo222=++&&& (3) x x x x io222oo=++&&& (4) x tx x x xiooo222o=++&&& 解: 凡是能用线性微分方程描述的系统就是线性系统。
线性系统的一个最重要特性就是它满足叠加原理。
该题中(2)和(3)是线性系统。
图(题)中三同分别表示了三个机械系统。
求出它们各自的微分方程,图中x i 表示输入位移,x o 表示输出位移,假设输出端无负载效应。
图(题 解: (1)对图(a)所示系统,由牛顿定律有 即xc x c c x m i&&&&121oo )(=++ (2)对图(b)所示系统,引入一中间变量x,并由牛顿定律有 消除中间变量有(3)对图(c)所示系统,由牛顿定律有 即x k x c x k k x c iioo121)(+=++&&求出图(题所示电系统的微分方程。
图(题)解:(1)对图(a)所示系统,设i 1为流过R 1的电流,i 为总电流,则有 消除中间变量,并化简有u R C u CC R R u R C u R C u C C R R u R C iiiooo12211221222121211)()1(1+++=-+++&&&&&&&(2)对图(b)所示系统,设i 为电流,则有 消除中间变量,并化简有求图(题所示机械系统的微分方程。
图中M 为输入转矩,C m 为圆周阻尼,J 为转动惯量。
解:设系统输入为M (即),输出θ(即),分别对圆盘和质块进行动力学分析,列写动力学方程如下:消除中间变量x,即可得到系统动力学方程KM M c Mm C R c k KJ c C km R cJ mC mJ mmm++=++-++++&&&&&&&&&θθθθ)(22)()()4( 输出y(t)与输入x(t)的关系为y(t)= 2x(t)+x 3(t)。
第一章习题及答案例1-1根据题1-1图所示的电动机速度控制系统工作原理图(1) 将a,b与c,d用线连接成负反馈状态;(2) 画出系统方框图。
解(1)负反馈连接方式为:db↔;a↔,c(2)系统方框图如图解1-1 所示。
例1-2题1-2图是仓库大门自动控制系统原理示意图。
试说明系统自动控制大门开闭的工作原理,并画出系统方框图。
题1-2图仓库大门自动开闭控制系统解当合上开门开关时,电桥会测量出开门位置与大门实际位置间对应的偏差电压,偏差电压经放大器放大后,驱动伺服电动机带动绞盘转动,将大门向上提起。
与此同时,和大门连在一起的电刷也向上移动,直到桥式测量电路达到平衡,电动机停止转动,大门达到开启位置。
反之,当合上关门开关时,电动机带动绞盘使大门关闭,从而可以实现大门远距离开闭自动控制。
系统方框图如图解1-2所示。
例1-3 题1-3图为工业炉温自动控制系统的工作原理图。
分析系统的工作原理,指出被控对象、被控量和给定量,画出系统方框图。
题1-3图 炉温自动控制系统原理图解 加热炉采用电加热方式运行,加热器所产生的热量与调压器电压c u 的平方成正比,c u 增高,炉温就上升,c u 的高低由调压器滑动触点的位置所控制,该触点由可逆转的直流电动机驱动。
炉子的实际温度用热电偶测量,输出电压f u 。
f u 作为系统的反馈电压与给定电压r u 进行比较,得出偏差电压e u ,经电压放大器、功率放大器放大成a u 后,作为控制电动机的电枢电压。
在正常情况下,炉温等于某个期望值T °C ,热电偶的输出电压f u 正好等于给定电压r u 。
此时,0=-=f r e u u u ,故01==a u u ,可逆电动机不转动,调压器的滑动触点停留在某个合适的位置上,使c u 保持一定的数值。
这时,炉子散失的热量正好等于从加热器吸取的热量,形成稳定的热平衡状态,温度保持恒定。
当炉膛温度T °C 由于某种原因突然下降(例如炉门打开造成的热量流失),则出现以下的控制过程:控制的结果是使炉膛温度回升,直至T °C 的实际值等于期望值为止。
《控制工程基础》练习题及答案1.单选题L作为控制系统,一般()。
A.开环不振荡B.闭环不振荡C.开环一定振荡D.闭环一定振荡正确答案:A2.串联相位滞后校正通常用于()。
A.提高系统的快速性B.提高系统的稳态精度C.减少系统的阻尼D.减少系统的固有频率正确答案:B3 .下列串联校正装置的传递函数中,能在频率3C=4处提供最大相位超前角的是()。
A. (4s + l)∕(s+l)B. (s+l)∕(4s + l)C. (0.1s + l)∕(0.625s + l)D. (0.625s + l)∕(0.1s + l)正确答案:D4 .利用乃奎斯特稳定性判据判断系统的稳定性时,Z=P-N中的Z表示意义为()。
A.开环传递函数零点在S左半平面的个数B.开环传递函数零点在S右半平面的个数C.闭环传递函数零点在S右半平面的个数D.闭环特征方程的根在S右半平面的个数正确答案:D5 .某环节的传递函数为G⑸=Ts + l,它是()。
A.积分环节B.微分环节C. 一阶积分环节D. 一阶微分环节正确答案:D6.单位反馈控制系统的开环传递函数为G(s)=4∕s(s÷5),则系统在r(t)=2t输入作用下,其稳态误差为()。
A. 10/4B. 5/4C. 4/5D. 0正确答案:A7.已知系统的开环传递函数为100∕S2(0∙lS+l)(5S+4),则系统的开环增益以及型次为()。
A. 25 , ∏型B. IOO , ∏ 型C. 100 z I 型D. 25 , O 型正确答案:A8.控制论的中心思想是()。
A. 一门即与技术科学又与基础科学紧密联系的边缘科学8 .通过信息的传递、加工处理和反馈来进行控制C.抓住一切通讯和控制系统所共有的特点D,对生产力的发展、生产率的提高具有重大影响正确答案:B9 .反馈控制系统是指系统中有()。
A.反馈回路B.惯性环节C.积分环节D. PID调节器正确答案:A10.下面因素中,与系统稳态误差无关的是()。
习 题2.1 什么是线性系统?其最重要的特性是什么?下列用微分方程表示的系统中,x o 表示系统输出,x i 表示系统输入,哪些是线性系统? (1) x x x x x ioooo222=++ (2) x tx x xiooo222=++ (3)x x x x io222oo=++ (4) x tx x x xiooo222o=++ 解: 凡是能用线性微分方程描述的系统就是线性系统。
线性系统的一个最重要特性就是它满足叠加原理。
该题中(2)和(3)是线性系统。
2.2 图(题2.2)中三同分别表示了三个机械系统。
求出它们各自的微分方程,图中x i 表示输入位移,x o 表示输出位移,假设输出端无负载效应。
图(题2.2) 解: (1)对图(a)所示系统,由牛顿定律有xm x c x x c ioo2o1)(=-- 即x c x c c xm i121oo )(=++ (2)对图(b)所示系统,引入一中间变量x,并由牛顿定律有)1()()(1x xc k x x oi-=- )2()(2x k x xc oo=-消除中间变量有x ck x k k xk k c io121o21)(=-- (3)对图(c)所示系统,由牛顿定律有 x k x x k x xc ooioi21)()(=-+-即x k x c x k k xc iioo121)(+=++ 2.3求出图(题2.3)所示电系统的微分方程。
图(题2.3)解:(1)对图(a)所示系统,设i 1为流过R 1的电流,i 为总电流,则有⎰+=idt Ci R u o122i R u u o i 11=-dti i Cu u oi)(111⎰-=-消除中间变量,并化简有u R C u CC R R uR C u R C u C C R R u R C iiiooo12211221222121211)()1(1+++=-+++(2)对图(b)所示系统,设i 为电流,则有⎰++=idtC i R u u oi111⎰+=i R idt Cu o221 消除中间变量,并化简有u Cu R u C C u R R iioo2221211)11()(+=+++2.4 求图(题2.4)所示机械系统的微分方程。
1 控制工程基础习题解答 第二章 2-1.试求下列函数的拉氏变换,假定当t<0时,f(t)=0。 (1).ttf3cos15 解:9553cos152ssstLtfL (2). tetft10cos5.0 解:1005.05.010cos25.0ssteLtfLt
(3). 35sinttf 解:252355cos235sin2135sin2ssttLtLtfL 2-2.试求下列函数的拉氏反变换。 (1).11sssF 解:11121111skskLssLsFL 10111ssssk 111112ssssk
tessLsFL111111
(2).321ssssF 2
解:3232121111skskLsssLsFL 1223211sssssk
2333212sssssk
tteessLsFL231123221
(3).2222522ssssssF 解:22222225232112211sskskskLsssssLsFL 22222225221sssssssk
3331331222222513223222232kkjjjjkkkjssssssssjsksk
teesssLssssLsFLttcos32111322223322221211
2-3.用拉氏变换法解下列微分方程 (1)ttxdttdxdttxd18622,其中00,10tdttdxx 解:对方程两边求拉氏变换,得: 3
0,8747818747814242168616181618060042132132122222teesXLtx
kkksksksksssssssssssX
ssXssXssXsssXxssXtdttdxsxsXs
tt (2)210txdttdx,其中00x 解:对方程两边求拉氏变换,得:
0,515151511010221021001012121tesXLtx
kksksksssXssXssXssXxssXt (3)300100txdttdx,其中500x 解:对方程两边求拉氏变换,得: 4
0,4734731001003005030010050300100010012121tesXLtx
kkskskssssX
ssXssXssXxssX
t 2-4.某系统微分方程为txdttdxtydttdyii322300,已知0000ixy,其极点和零点各是多少?
解:对方程两边求拉氏变换,得:
233223323022030000zpiiiisssssX
sYsG
sXxssXsYyssY
2-5.试求图2-25所示无源网络传递函数。
解: a).
idtCiRuuiRu
i12001
iC RRu
ua) u
iC
R u
b) L
u
c)
i
iRLC
LRCii
i 5
111212002012001CsRRCsRU
UsG
UUCsRCsURCsIIRU
UIRU
iii
b).
idtCuudtdiLiRui100
111200200RCsLCsU
U
sG
ULCsRCsUCsIU
ULsIIRU
iii
c). 22222222222211111111RsLscLRsLRsCsLRZRsLsLRZ
m fm
x
x
f f
a)
kkf
b)
x
xkkf c) xxkkf e) xkk
M d)
xx
k
f
f
M FYxkf
fM Fkk
x
f) g)
xx 6 02001XkXXfsXXkii
02020101sXfXkXXsfXXkii
21212121221221
2211220
111122222222222222220LLRRsLLRRsLLCRRLRRsLLRUUsGURsLsLRRsLscLRsLRRsLscLRsLRUii
2-6.试求图2-26所示机械系统传递函数。 解: a). 微分方程为:00201xmxfxxfi
拉氏变换得:020201XmssXfXXsfi 传递函数为:211ffmsfsG b). 微分方程组为:
02010111xkxxfxxfxxk
i
拉氏变换得:
0202102010111XkXfskfsXkXkXXfsXXfsXXkii
传递函数为:21211kkfskkfsksG c). 微分方程为:02001xkxxfxxkii 拉氏变换得: 传递函数为:211kkfsfsksG d). 微分方程为:
02020101xfxkxxfxxkii
拉氏变换得: 传递函数为:212111kksffsfksG e). 微分方程为:00021ymyfykkFi 7
拉氏变换得:0212YkkfsmssFi 传递函数为:2121kkfsmssG f). 微分方程为:010100202xfxkxmxxfxxkii
拉氏变换得:02121222YkksffmsXksfi 传递函数为:2121222kksffmsksfsG
g). 微分方程为:0010121012xfxkxxkxmxxkFi 拉氏变换得:012212XkfskkkfsmssFi 传递函数为:21222132kkfskmskkmfsksG 2-7.对于如图2-27所示系统,试求从作用力F1(t)到位移x2(t)的传递函数。其中B为粘性阻尼系数。作用力F2(t)到位移x1(t)的传递函数又是什么? 解:从作用力F1(t)到位移x2(t) 微分方程为:2222211121111xmxkxxfxmxxfxkF 拉氏变换得: 22221222222211XfskfssmkksmfskfssmsmsF
传递函数为: 2121212213214211
21kkfskksmkmkfsmmsmmfsFXsG
从作用力F2(t)到位移x1(t)
f kkF
xF
x
m
m2