声音识别与定位系统的设计与实现
- 格式:ppt
- 大小:1.04 MB
- 文档页数:39

一、刖目近年来,声源定位技术已成为新的研究热点,被广泛应 用于民用、军事、工业等各个领域111。
而在人工智能领域,听觉与视觉相比,还处于一个初期研究阶段。
相对于视觉场 的180度的范围,听觉可以带来360度的听觉场景,可以定 位不在视觉场范围内的声音目标,因此,研究声源定位系统 对于人工智能来说同样具有重要的理论意义和实际价值。
当前,基于麦克风阵列的声源定位技术,按照其定位原理不同,可以分为三类:基于最大输出功率的可控波束形 成的定位技术、高分辨率谱估计声源定位技术、基于到达 时间差(T D O A)的声源定位技术|2'与前两者相比,基于 T D O A的定位算法,具有成本较低、运算量小、实时性好等 优点而得到广泛应用|M1。
文献[7]将T D O A算法用于对室内 移动目标的定位,验证了该方法的可行性。
在T D O A算法中,时延估计是算法的关键。
当前对于 T D O A定位算法的研究很多都是基于信号的自相关和互相关的方法1B|。
文献[9]在传统二次相关算法中的互相关函数部分加人S C O T加权函数,提出了基于改进二次相关算法的T D O A时延估计。
文献[10]通过4个麦克风阵列,利用 归一化正方形算法求的声源坐标,时延估计和定位算法采用MSP430单片机实现。
本文提出一种归一化三角形算法,声音信号的到达时延通过单片机STC15定时器获得,该算 法通过勾股定理根据麦克风阵列的空间排列以及到达时延,推导出声源目标在二维空间中的位置,然后通过L C D显示 屏显示出来。
二、 系统方案设计在本系统中,采用三个处于不同位置的声音传感器对声音信号进行采集,然后通过L M393模块将声音传感器的模拟信号转换为数字信号,以便于单片机进行信号处理,同时L M393还可以起到缓冲、隔离的作用%。
单片机接收到L M393信号后,启动定时器,同时标记是哪个传感器检测到声音信号,用于记录不同传感器之间的时延,然后根据 T D O A算法计算出声源的位置信息,最后通过L C D1602显示 位置结果。
声源定位系统的设计一、课题研究的目的和意义声源定位技术是利用声学与电子装置接受声波以确定声源位置的一种技术,它是一种重要的军事侦察手段。
声源定位产生于第一次世界大战。
开始根据火炮发出的声音测定火炮位置。
其系统有多个声测哨站与声测中心组成,两者用电缆连接。
声测哨根据传感器接受信号,声测中心记录信号并根据同一信号到达不同传感器的时间差计算火炮位置[1]。
随着雷达侦测技术的兴起,声定位技术曾一度遭到冷冻,法军和美军分别于70年代80年代取消了声测侦察[2]。
近年来,由于雷达面临着电子干扰、反辐射导弹、低空突防和隐身技术这四大威胁,越来越容易遭受攻击。
因此,人们又开始重视被动式传感器,重新激起对声测技术的兴趣[3]。
声源定位作为一种传统的侦察手段,近年来通过采用新技术,提高了性能,满足了现代化的需要,其主要特点是[4]:(1)不受通视条件限制。
可见光、激光和无线电侦察器材需要通视目标,在侦察器材和目标之间不能有遮蔽物,而声测系统可以侦察遮蔽物(如山,树林等)后面的声源。
(2)隐蔽性强。
声测系统不受电磁波干扰也不会被无线电侧向及定位,工作隐蔽性较强。
(3)不受能见度限制。
其他侦察器材受环境气候影响较大,在恶劣气候条件下工作时性能下降,甚至无法工作。
声测系统可以在夜间、阴天、雾天、和下雪天工作,具有全天候工作的特点。
声源定位在战场之外也同样具有广泛的应用前景,它可用于电话会议系统、视频会议系统、可是电话等系统中的控制摄像头和传声器阵列波速方向对准正在说话的人;也可用于语音及说话人识别软件的前端预处理,以提供高质量的声音信号,提高语音及说话人识别软件的识别率;亦可用于强噪声环境下的声音获取、大型场所的会议记录,以提高声音拾取质量;还可用于助听装置中,更好地为耳障患者服务等[5]。
声音是人类常用的工具,是传递和获取信息中非常重要的一种。
不同物体往往发出自己特有的声音,而根据物体发出的声音,就可以判断出物体的方位[6]。
可移动声源定位系统设计随着科技的进步和人们生活水平的提高,人们对生活质量的要求也越来越高,音乐渐渐成为人们生活的一部分。
而在演出、录音等领域,人们需要对声源进行准确的定位,此时可移动声源定位系统就显得尤为重要。
可移动声源定位系统是一种可以对声源进行定位的设备,它通过使用多个麦克风、信号处理算法及系统控制等技术手段,可以将声源的位置进行高精度的监测和追踪,然后将声源的位置信息传输给设备,进而进行声音的定位和分析。
该系统结合了传统的声音处理技术和现代计算机技术,提供了一种简单又高效的可移动声源定位方案。
本文将从硬件设计、信号处理和系统控制等方面进行阐述,探讨可移动声源定位系统的设计。
一、硬件设计1.麦克风阵列的设计麦克风阵列是可移动声源定位系统的核心部件之一,其位置和数量直接影响到系统的定位精度和准确度。
因此,麦克风阵列的设计需要考虑到麦克风的数量、类型、布局和定位方式等因素。
为了提高定位精度,通常采用多麦克风阵列,而且每个麦克风的距离应当相等,以保证声音到达不同麦克风的时间差得到精确测算。
麦克风类型可以选择传统动圈麦克风或者卡尔曼过滤麦克风,其灵敏度要么高,要么稳定。
2.模拟信号处理为了满足可移动声源定位系统设计的实际应用环境,处理模拟信号是该系统的一个重要特点。
高精度变倍增益放大器(CGA)和高速模数转换器(ADC)是模拟信号处理的主要组件。
其中,变倍增益放大器的设计首先需要选择放大器的噪声系数,以保证输出一致性和静态精度。
制造尽量保证成熟系统性能的简单PCB可导致高性价比。
数字信号处理是可移动声源定位系统的另一个核心技术,它可以处理从多个麦克风中收集到的信号,并得出声源位置的信息。
数字信号处理的主要任务是通过信号滤波、时差测量等算法,得到声源距离各个麦克风的时间差,然后进一步计算出声源的空间位置。
在数字信号处理中,需要利用MATLAB等处理软件,运用协助算法开始估计不同麦克风到声源的时间差,并由此推出声源位置的估计值。
《基于麦克风阵列的声源定位技术研究》一、引言随着科技的不断发展,声源定位技术在众多领域中扮演着越来越重要的角色。
麦克风阵列技术作为声源定位的主要手段之一,因其高精度、高效率的特点,得到了广泛的应用。
本文旨在探讨基于麦克风阵列的声源定位技术的研究现状、原理及实现方法,并对其未来发展趋势进行展望。
二、麦克风阵列技术概述麦克风阵列是指将多个麦克风按照一定的几何布局排列在一起,形成一个具有特定功能的声学传感器系统。
通过分析麦克风接收到的声波信号,可以实现对声源的定位、追踪和识别等功能。
麦克风阵列技术具有高精度、高效率、低成本等优点,因此在军事、安防、智能家居、机器人等领域得到了广泛应用。
三、声源定位技术原理基于麦克风阵列的声源定位技术主要依赖于声波传播的特性和麦克风的信号处理技术。
其基本原理包括时差法(TDOA)、相位差法、波束形成法等。
其中,时差法是应用最广泛的一种方法。
通过测量不同麦克风接收到声波信号的时间差,结合声波传播速度和麦克风阵列的几何布局,可以计算出声源的位置。
四、声源定位技术实现方法1. 信号预处理:对接收到的声波信号进行滤波、降噪等预处理操作,以提高信噪比。
2. 特征提取:通过时频分析等方法提取出声源信号的特征,如到达时间、到达角度等。
3. 定位算法:根据提取的特征信息,运用时差法、相位差法等算法计算出声源的位置。
4. 位置输出:将计算得到的位置信息输出,可用于后续的声源追踪、识别等任务。
五、研究现状及挑战目前,基于麦克风阵列的声源定位技术已经取得了显著的成果。
然而,在实际应用中仍面临一些挑战,如环境噪声干扰、多径效应、非线性声波传播等问题。
为了解决这些问题,研究者们不断探索新的算法和技术,如深度学习、机器学习等人工智能技术在声源定位中的应用。
此外,如何提高定位精度、降低系统复杂度、实现实时性等也是当前研究的重点。
六、未来发展趋势未来,基于麦克风阵列的声源定位技术将朝着更高精度、更低成本、更智能化的方向发展。
室内定位和导航系统的设计与实现概述随着人们对室内定位和导航需求的增加,室内定位和导航系统成为了一项重要的技术领域。
本文将探讨室内定位和导航系统的设计与实现,介绍其原理、挑战和解决方案。
一、室内定位和导航系统的原理室内定位和导航系统通过利用无线通信、地磁传感器、惯性测量单元等技术手段来确定用户在室内环境中的准确位置,并为其提供准确的导航指引。
以下是几种常见的室内定位和导航原理:1. 无线通信定位:利用WiFi、蓝牙、射频识别等无线通信技术,通过接收器接收来自参考节点的信号,计算用户与参考节点之间的距离,从而确定用户位置。
2. 地磁传感器定位:利用地磁传感器感知地磁场的变化,并通过对地磁场的分析,确定用户的位置。
3. 惯性测量定位:利用加速度计、陀螺仪等惯性测量单元,测量用户的加速度和角速度等信息,通过积分和滤波算法计算用户的位置和方向。
4. 视觉定位:利用摄像头、图像识别和计算机视觉等技术,对室内环境进行图像分析和特征提取,从而确定用户的位置和方向。
二、设计室内定位和导航系统的关键挑战在设计和实现室内定位和导航系统时,面临着一些关键挑战。
以下是几个常见的挑战:1. 多路径效应:室内环境中存在多个反射、干扰等问题,导致无线信号的多次传播和变形,造成定位误差。
2. 信号遮挡:在室内环境中,墙壁、家具等物体会阻挡信号的传输,导致信号弱化和失真,影响定位精度。
3. 定位算法优化:针对不同的定位原理,需要研发出适应各种复杂环境的定位算法,提高定位的准确性和鲁棒性。
4. 能耗问题:室内定位和导航系统需要长时间稳定运行,因此需要考虑系统的能耗问题,延长设备的使用时间。
三、室内定位和导航系统的解决方案为了解决上述挑战,设计室内定位和导航系统需要综合运用多种技术手段,采取合适的解决方案。
以下是几个常见的解决方案:1. 多路径效应和信号遮挡问题:可以采用多传感器融合的方式,结合不同的定位原理,通过对多个传感器获取的数据进行融合处理,提高定位的准确性和稳定性。
物联网技术 2023年 / 第9期220 引 言随着信息技术和人工智能的快速发展,声音导航跟踪定位的应用越来越广泛。
声音信号是人们传递信息的重要方式,在智能车载、智能家居、可穿戴设备等领域受到关注[1]。
声源定位技术,在现代工业制造中可以通过噪声和异响进行定位[2];在国防现代化方面,可以用来辅助测量炮兵阵地、定位狙击手位置、测量弹药、测试火炮的着落点和空中炸点[3];在生活中,可以准确识别空调、冰箱、洗衣机等家电产品的噪声源,从而确定其位置、分布,并优化控制减小噪声,改善人们的工作和生活环境[4]。
声源定位技术主要可以分成三大类:第一类是基于最大输出功率的可控波束形成技术;第二类是高分辨率谱估计技术;第三类是基于声达时间差的定位技术,利用到达阵列上各传声器的声音信号间的时间差来定位声源,这类技术计算量小,比较适用于实时处理,实际运用也十分广泛。
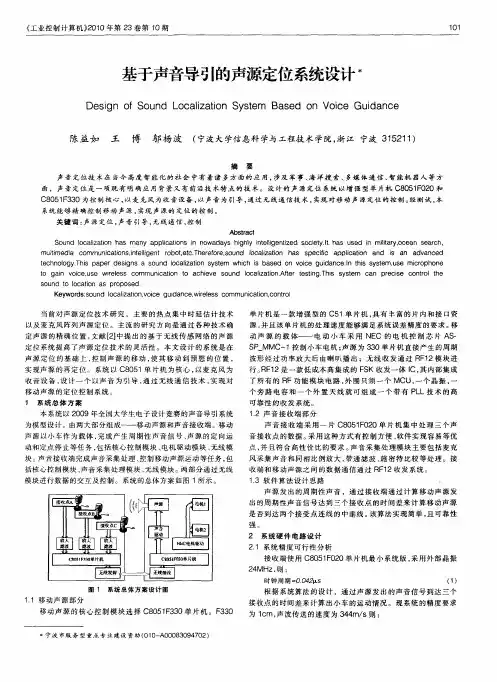
本文基于声源近场传播模型[5-6]设计并制作了一个以STM32为主控的声源定位跟踪系统,该系统实现了对较宽频率声源进行定位与追踪[7],在视频会议、语音增强、自动语音识别领域[8-9]有重要的应用价值。
1 理论分析与计算1.1 TDOA 的基本定位原理传统的基于TDOA 技术[10-12]的无线定位系统一般涉及4个基站和1个移动平台MB(x , y , z ),其中下行发射基站为B 0(x 0, y 0, z 0),上行接收基站为B i (x i , y i , z i ), i =(1, 2, 3),移动平台MB 发送到各基站的上行信号的到达时间差为t 10、t 20、t 30,且均可测得。
设R i 为MB 到各基站的距离,已知电磁波在空气中的传播速度为c ,则可算得MB 到各个基站的距离差R 1-R 0=t 10×c =R 10,R 2-R 0=t 20×c =R 20,R 3-R 0=t 30×c =R 30。
由此可列方程组:R x x y y z z R x x y y z z R 020202021212121222=−+−+−=−+−+−=()()()()()()()()()()()()x x y y z z R x x y y z z 22222232323232−+−+−=−+−+− (1)解三元二次方程组便可求得移动平台MB 的坐标(x , y , z ),从而实现声源定位。
《基于麦克风阵列的声源定向系统的研究与实现》篇一一、引言随着科技的不断发展,声源定向系统在多个领域的应用日益广泛,包括但不限于智能机器人、智能家居、音频处理以及军事应用等。
而基于麦克风阵列的声源定向系统是当前声源定位研究领域的热门话题。
本篇论文将详细介绍基于麦克风阵列的声源定向系统的研究与实现过程。
二、麦克风阵列技术概述麦克风阵列技术是一种利用多个麦克风组成的阵列系统,通过分析声波在空间中的传播特性,实现对声源的定位和定向。
该技术具有高精度、高效率、低成本的优点,广泛应用于音频处理和语音识别等领域。
三、声源定向系统原理基于麦克风阵列的声源定向系统主要依赖于声波传播的相位差和时间差原理。
当声波传播到麦克风阵列时,不同麦克风之间会接收到不同时间和幅度的声波信号,根据这些差异,可以确定声源的方向和位置。
四、系统设计与实现4.1 系统架构设计本系统采用分布式架构设计,包括硬件部分和软件部分。
硬件部分主要包括多个麦克风、信号处理模块和通信模块;软件部分则包括信号采集、预处理、特征提取、声源定位和定向等模块。
4.2 信号采集与预处理首先,通过麦克风阵列采集声波信号,并进行预处理,包括滤波、降噪等操作,以提高信噪比和定位精度。
4.3 特征提取与声源定位利用特征提取算法从预处理后的信号中提取出关键特征,如到达时间差(TDOA)等。
然后通过声源定位算法,如最小均方误差(LMS)算法等,实现对声源的精确定位。
4.4 声源定向与实现结果根据声源的位置信息,结合声音传播方向信息,实现对声源的定向。
本系统通过计算声音传播方向向量和阵列响应矩阵的关系,实现声源定向的精确输出。
同时,我们通过实验验证了系统的性能和准确性。
五、实验与结果分析5.1 实验环境与数据集我们采用多种环境下的实际录音数据作为实验数据集,包括室内、室外、嘈杂环境等场景。
实验环境包括多个不同布局的麦克风阵列系统。
5.2 实验结果与分析通过对实验数据的分析,我们发现本系统在各种环境下的声源定位和定向性能表现良好。
基于TDOA的声源定位装置的设计与实现
薛欣
【期刊名称】《电子产品世界》
【年(卷),期】2024(31)4
【摘要】随着工业自动化仪器仪表的迅猛发展,声音位置的实时定位是很多智能应用设备不可或缺的功能之一,其中麦克风阵列技术被广泛应用于军事、视频电视会议、智能交通以及智能机器人等领域,以提升声音捕捉和定位的效果。
针对传统麦克风阵列声源定位装置存在体积大、成本高、受环境干扰等问题,提出了一种基于STM32的便携式声源定位装置。
该装置以STM32F411RET6为核心处理器,利用STM32CubeMX和MDK-ARM进行软件程序设计。
该设计在信号处理、体积和成本等方面具有明显的优势,为弥补传统装置的缺陷提供了一种新颖的解决方案,具备广泛的应用前景和深远的研究意义。
【总页数】5页(P17-21)
【作者】薛欣
【作者单位】太原学院智能与自动化系
【正文语种】中文
【中图分类】TN929.11
【相关文献】
1.基于TDOA的声源定位算法研究及实现
2.基于智能手机TDOA估计的被动声源定位方法与系统实现
3.基于麦克风阵列的声源定位装置的设计与实现
4.基于
TDOA的声源定位系统设计5.基于TDOA声源定位算法的激光武器狙击手攻击系统设计
因版权原因,仅展示原文概要,查看原文内容请购买。
室内导航定位系统的设计与实现随着现代科技的快速发展和人们对生活质量要求的提高,室内导航定位系统的设计与实现变得日益重要。
无论是在商场、机场、医院还是大型企事业单位,一个高效准确的室内导航定位系统可以帮助用户迅速找到目标位置,提高生活和工作的便利性。
本文将介绍室内导航定位系统的设计与实现的关键要素,并探讨如何提高其准确性和实用性。
首先,室内导航定位系统的设计与实现需要建立一个包含室内地图的数据库。
该数据库应包括建筑物的平面图及其内部的结构信息。
平面图需要准确反映建筑物的布局和房间分布,同时标注重要的设施和出口位置。
结构信息包括房间编号、面积、功能、楼层数等,这些信息将有助于用户在导航过程中识别目标位置。
为了实现数据库的设计,最常用的方法是通过室内地图的测绘和数据采集,如使用激光雷达扫描建筑物并获取结构信息。
其次,室内导航定位系统的设计与实现需要有效的定位技术。
目前,常用的室内定位技术包括无线局域网(Wi-Fi)定位、蓝牙低功耗(BLE)定位、超声波定位和惯性导航定位等。
无线局域网定位通过收集周围Wi-Fi信号强度和位置,结合事先建立的信号强度模型进行定位。
蓝牙低功耗定位通过检测周围蓝牙设备的信号强度和位置进行定位。
超声波定位利用超声波传感器发射和接收声波信号,根据声波的传播时间来计算位置。
惯性导航定位则通过陀螺仪、加速度计等传感器来测量用户的运动和移动方向,并实时计算位置。
根据需求和成本效益,选择适合的定位技术是室内导航定位系统设计的重要一环。
在设计与实现过程中,室内导航定位系统需要利用智能手机或其他定位设备来与用户进行交互。
通过室内导航软件或应用程序,用户可以输入目标位置或目的地,然后系统会根据用户的当前位置和地图数据库中存储的信息进行路径规划,并提供导航指引。
用户可以通过视觉界面、声音提示或振动反馈获得导航指引。
对于辅助视力或听力障碍的用户,还可以提供特殊的导航模式和辅助功能,以增强用户的体验和使用便捷性。
狙击手声学定位设备的设计与实现冯策;蒋灏;赖东林;周进宝【摘要】现代战争中由于狙击手的存在给士兵带来了极大的威胁,为了提高对士兵的保护,设计了一种可实时探测狙击手位置的声学定位设备.简要介绍了设备的工作原理、硬件组成、软件与硬件设计的主要技术要求和实现方法.通过大量试验证明该设备发现概率高、定位精度高、虚警率低.【期刊名称】《电声技术》【年(卷),期】2012(036)006【总页数】3页(P41-43)【关键词】狙击手;声学定位;传声器【作者】冯策;蒋灏;赖东林;周进宝【作者单位】中国电子科技集团公司第三研究所,北京100015;中国电子科技集团公司第三研究所,北京100015;中国电子科技集团公司第三研究所,北京100015;中国电子科技集团公司第三研究所,北京100015【正文语种】中文【中图分类】O429;TN6411 引言随着狙击步枪射程与精度的提高和高性能观瞄设备的涌现,狙击手的威胁日益增加。
在常规作战、维和、反恐等作战中,尤其是在城市巷战、丛林战中,狙击手能够高效率地射杀敌方人员、毁伤关键设备,迟滞敌方的行动。
例如俄罗斯在车臣的剿匪行动,联合国在波黑的维和行动,以及近期美军在伊拉克行动中遭遇了大量的武装狙击手,都形成了很大威胁。
据《华盛顿邮报》报道,伊拉克战争美军的伤亡比例中,近7成是被狙击手狙杀。
目前世界上不少国家加紧开展了反狙击手探测系统的研究,主要有声探测系统、红外探测系统和激光探测系统[1]。
由于在城市的环境下,楼群、树木等障碍物使得光电、红外很难发挥作用,而声探测具有全被动、全方位、全天候,不受通视影响等优点,所以各国研制的反狙击手探测系统以声探测系统为主。
笔者设计了一种反狙击手声探测设备,简要介绍了该设备的工作原理及软硬件设计的实现方法。
2 狙击手声探测工作原理狙击手声学定位设备通过声传感器阵列接收狙击手射击时弹丸出膛的膛口波和弹丸超音速飞行产生的激波(或称马赫波),对狙击手的位置实施探测和定位[2]。
简易声音定位系统的设计魏冰伟【摘要】文章给出了一种简单的声音定位系统的设计方法,并对每个单元电路的设计方案进行了比较论证。
系统采用TI公司的MSP430作为系统的控制核心。
文章针对关键声音的发生,接收模块和处理模块部分,经过充分比较、论证,最终选用了低功率的扬声器作为声音发生器,用改进了的麦克风作为声音接收器,通过不同方位接收器对声音到达时间的检测,实现了声音定位的功能;系统显示部分选用了12864液晶屏幕,串行接口,显示清晰,界面人性化。
%This paper presents a simple design method for the sound positioning system,and the design scheme of each unit circuit is demonstrated.The system adopts MSP430 as the core of the system.In this paper,the key is to receive the module and the processing module.After comparing and demonstrating,chose the low power loudspeaker as the sound generator,and use the improved microphone as the sound receiver.Through the detection of the sound arrival time of different directions,the sound positioning function is realized.The system used the 12864 LCD screen and serial interface,which can display clearly,while the interface is full of hommization.【期刊名称】《无线互联科技》【年(卷),期】2015(000)021【总页数】3页(P43-44,53)【关键词】声音定位;单元电路;界面;MSP43【作者】魏冰伟【作者单位】武昌工学院,湖北武汉 430065【正文语种】中文本系统要求设计一套简易的声音定位系统。
《基于麦克风阵列的声源定位技术研究》一、引言声源定位技术在现代音频处理、智能监控和人机交互等领域有着广泛的应用。
其中,基于麦克风阵列的声源定位技术,由于能够有效地进行空间定位,因此在军事、安全监控、语音交互等方面备受关注。
本文将重点介绍基于麦克风阵列的声源定位技术的研究现状、原理及方法,并探讨其未来的发展趋势。
二、声源定位技术的研究现状目前,声源定位技术主要分为两大类:基于传声器阵列的声源定位技术和基于声音传播特性的声源定位技术。
其中,基于麦克风阵列的声源定位技术以其高精度、高效率的特点在众多领域得到了广泛应用。
该技术通过多个麦克风组成的阵列,利用声音到达不同麦克风的时延差异,实现声源的定位。
三、麦克风阵列声源定位原理及方法1. 原理麦克风阵列声源定位技术主要依据声音传播的时延差异和阵列信号处理技术实现。
当声音传播到麦克风阵列时,由于不同麦克风之间的距离不同,导致声音到达各麦克风的时延存在差异。
通过测量这些时延差异,并结合阵列信号处理技术,即可实现对声源的定位。
2. 方法(1)基于时延估计的声源定位方法:该方法通过估计声音到达不同麦克风的时延,结合麦克风阵列的几何关系,计算出声源的位置。
(2)基于模式识别的声源定位方法:该方法利用机器学习、深度学习等技术,对声音信号进行特征提取和模式识别,从而实现对声源的定位。
(3)基于多传感器融合的声源定位方法:该方法将麦克风阵列与其他传感器(如摄像头、雷达等)进行融合,综合利用多种传感器的信息实现声源的精准定位。
四、声源定位技术的应用基于麦克风阵列的声源定位技术在众多领域有着广泛的应用。
在军事领域,可用于目标探测、战场监控等;在安全监控领域,可用于视频监控系统的音频辅助定位;在人机交互领域,可用于语音识别、智能音响等。
此外,该技术还可应用于医疗、娱乐等领域。
五、未来发展趋势随着人工智能、物联网等技术的不断发展,基于麦克风阵列的声源定位技术将迎来更广阔的应用前景。
《基于麦克风阵列的声源定位技术研究》一、引言随着科技的不断发展,声源定位技术在众多领域中扮演着越来越重要的角色。
麦克风阵列技术作为声源定位的核心手段,通过多麦克风组合和信号处理,能够实现精准的声源定位。
本文旨在探讨基于麦克风阵列的声源定位技术的研究现状、方法以及未来发展趋势。
二、麦克风阵列技术概述麦克风阵列是由多个麦克风按照一定几何布局组成的系统,用于收集声波信号并进行分析处理。
通过合理布置麦克风,阵列可以有效地提高声源定位的精度和稳定性。
麦克风阵列技术主要分为波束形成、到达时间差(TDOA)估计、到达方向(DOA)估计等方法。
三、声源定位技术研究现状1. 波束形成技术:波束形成是麦克风阵列中常用的一种声源定位方法。
它通过加权求和的方式将多个麦克风的信号进行空间滤波,从而形成指向特定方向的声波束。
波束形成技术具有较高的定位精度和鲁棒性,广泛应用于语音识别、语音增强等领域。
2. TDOA估计:TDOA估计是通过测量声波在不同麦克风间的传播时间差来估计声源位置的方法。
该方法具有较高的空间分辨率和较低的信号处理复杂度,适用于多种声源定位场景。
3. DOA估计:DOA估计是利用信号的到达方向信息来估计声源位置的方法。
它通过对信号进行频域分析,提取出信号的频率特征,进而确定声源的方位。
DOA估计方法具有较高的定位精度和实时性,适用于动态声源定位。
四、声源定位技术研究方法1. 传统算法:传统算法主要包括基于模型的方法和非模型的方法。
基于模型的方法通常依赖于预先设定的阵列响应模型,通过对接收信号进行分析,提取出声源位置信息。
非模型的方法则更多地依赖于信号的统计特性,如互相关函数等。
2. 深度学习算法:近年来,深度学习在声源定位领域得到了广泛应用。
通过构建神经网络模型,可以实现对声源位置的端到端预测。
深度学习算法具有较高的定位精度和鲁棒性,尤其适用于复杂环境下的声源定位任务。
五、未来发展趋势1. 多模态融合:将麦克风阵列技术与视觉、音频等其他传感器进行融合,实现多模态的声源定位和识别。
室内声源定位系统研究内容
室内声源定位系统主要研究内容包括以下方面:
1.声源信号采集技术:室内声源定位系统需要采集环境中的声音信号,因此需要研究如何优化信号采集和处理技术,提高声音信号的质量和准确性。
2.声音处理算法:针对采集到的声音信号,需要研究可靠的声音信号
处理算法,包括噪声抑制、谱分析、时域分析等,在信号处理的过程中,
通过分析声音信号的频率、时域等特征信息,进行声源的识别和定位。
3.声源定位传感器的设计与优化:声源定位系统需要使用传感器进行
定位,因此需要研究传感器的设计和优化,提高传感器的灵敏度、鲁棒性
和精度。
4.室内声学环境:声源的定位精度受到室内声学环境的影响,在研究
中需要考虑室内声学环境的影响和优化方法。
5.定位算法的实现和优化:声源定位算法需要在计算机系统中实现,
因此需要研究如何优化算法的实现,提高定位算法的计算精度和速度。
6.应用场景研究与系统测试:室内声源定位系统的应用场景主要包括
智能家居、安防监控等领域,需要研究系统在不同场景下的精度和性能,
并进行系统测试和优化。