双足步行机器人仿真
- 格式:pdf
- 大小:13.89 MB
- 文档页数:95

双足行走机器人知识点总结一、概述双足行走机器人是一种仿生机器人,模拟人类的行走方式,具有独特的工作原理和技术特点。
双足行走机器人的出现,不仅是人工智能和机器人技术的进步,也是对人类步行机理的深入研究和模拟。
双足行走机器人在军事、医疗、救援、娱乐等领域有着广泛的应用前景,具有较高的研究和开发价值。
本文将对双足行走机器人的相关知识点进行总结,包括其工作原理、技术特点、应用领域、研究进展等方面的内容。
二、工作原理双足行走机器人的工作原理主要包括下面几个方面:1. 仿生学原理双足行走机器人的设计初衷是模拟人类的行走方式,因此其工作原理主要受到仿生学的影响。
通过对人类步行过程和髋关节、膝关节等关节运动原理的研究,获得了双足行走机器人的灵感和设计方向。
2. 动力学原理双足行走机器人的行走是由电动机、液压系统或气动系统提供动力,通过控制步进和踢腿的方式,实现机器人步态的模拟。
通过对机械结构的精确设计和动力学方程的优化计算,提高了双足行走机器人的步行效率和稳定性。
3. 控制原理双足行走机器人的控制系统是其核心技术之一,包括硬件控制和软件控制两方面。
在硬件控制方面,采用传感器检测地面状态和机器人姿态,实现对机器人动作的精确控制;在软件控制方面,采用运动规划和动力学优化算法,实现机器人稳定行走和适应不同地形的能力。
4. 感知与决策双足行走机器人的感知与决策系统是其智能化的重要组成部分,包括视觉、声音、激光雷达等传感器,以及路径规划、障碍避障等决策算法。
通过对环境信息的感知和对行为的决策,实现双足行走机器人在复杂环境中的稳定行走和智能导航。
三、技术特点双足行走机器人具有以下技术特点:1. 多关节结构双足行走机器人与传统的轮式机器人相比,具有更加复杂的多关节结构,可以实现更加灵活的步态和更加复杂的动作。
通过对关节结构和驱动方式的优化设计,提高了机器人的运动性能和动态稳定性。
2. 动力系统双足行走机器人的动力系统包括电动机、液压系统或气动系统,可以实现不同的步态演示和负重运输。
0 引言仿人双足机器人是通过模仿人体外形、结构和功能而设计的一类仿生机器人,一般具有双臂、双腿、躯干和头部等人体结构特征,能够像人一样进行双手协同作业和双足稳定行走[1]。
与轮式、履带式机器人相比,仿人双足机器人独特的单、双腿交替支撑行走模式具有更大的机动性和更强的环境适应能力,未来有望在军事、服务、科普和娱乐等领域获得广泛应用,具有重大的理论研究意义和实际应用价值。
仿人双足机器人的步态规划是在满足稳定步行条件的前提下,通过规划机器人步行时质心和踝关节的运动轨迹,确定机器人各关节转角随时间的变化函数曲线。
目前,生成双足机器人步态的主要方法可归为三类:1)基于人体运动捕捉数据(HMCD)的步态规划[2];2)基于力学简化模型的步态规划[3-5];3)基于智能算法的步态规划[6-7]。
以上方法中,第一类方法因人体与机器人在结构和形态上存在差异,故人体步行数据不能直接用于机器人的控制,需要经过复杂的修正、变换后才能使用;第三类方法包括人工神经网络(ANN)、中枢模式发生器(CPG)等智能算法[6-7],这类步态生成方法是机器人步态规划的发展趋势,但目前尚缺少严格的数学理论论证,仍不够成熟;而第二类方法是目前最简便、最成熟、应用最广泛的步态规划方法,主要基于二维或三维线性倒立摆、桌子-小车等力学简化模型规划步态[1,3-5]。
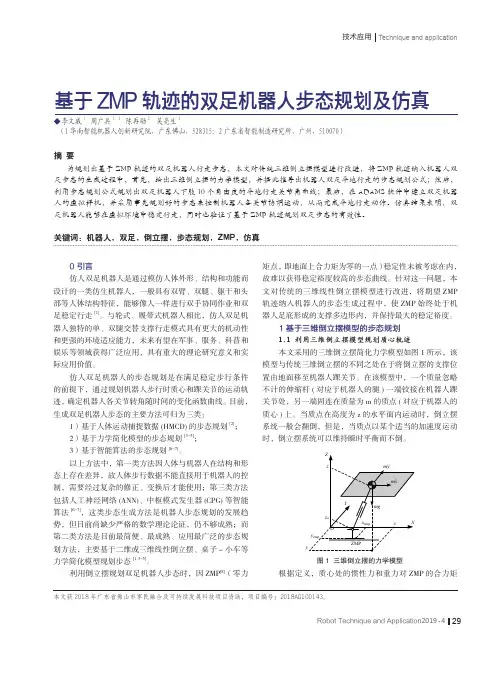
利用倒立摆规划双足机器人步态时,因ZMP[8](零力矩点,即地面上合力矩为零的一点)稳定性未被考虑在内,故难以获得稳定裕度较高的步态曲线。
针对这一问题,本文对传统的三维线性倒立摆模型进行改进,将期望ZMP 轨迹纳入机器人的步态生成过程中,使ZMP始终处于机器人足底形成的支撑多边形内,并保持最大的稳定裕度。
1 基于三维倒立摆模型的步态规划1.1 利用三维倒立摆模型规划质心轨迹本文采用的三维倒立摆简化力学模型如图1所示,该模型与传统三维倒立摆的不同之处在于将倒立摆的支撑位置由地面移至机器人踝关节。
双足步行机器人快速步行与仿真(英文)
蔚伟;吴伟国
【期刊名称】《系统仿真学报》
【年(卷),期】2009()13
【摘要】结合基于预观控制的ZMP步态生成模式的优点并引入脚尖脚后跟与地面间的旋转关节,以生成双足步行机器人质心和踝关节轨迹,同时提出了侧向质心摆动幅度递减方法以降低快速步行下侧向关节力矩。
通过2km/h双足动步行样本生成实例,利用机械设计与动力分析软件在虚拟物理环境下实现了快速动步行,验证了所提出方法的有效性。
【总页数】5页(P4014-4018)
【作者】蔚伟;吴伟国
【作者单位】哈尔滨工业大学机械设计系
【正文语种】中文
【中图分类】TP242.6
【相关文献】
1.基于Pro/E和ADAMS的双足步行机器人三维造型及仿真
2.基于Pro/E和ADAMS的双足步行机器人造型及仿真研究
3.双足机器人快速直线步行的一种步态规划
4.基于树型数据结构的双足机器人步行三维仿真
5.ADAMS环境下多关节型双足步行机器人步态仿真与结果分析
因版权原因,仅展示原文概要,查看原文内容请购买。
类人猿型机器人“GOROBOT”的可变ZMP双足动步行仿
真
吴伟国;郎跃东;梁风
【期刊名称】《系统仿真学报》
【年(卷),期】2007(19)17
【摘 要】为了有效地验证类人猿型机器人"GOROBOT"的双足动步行能力,通过合
理地将可变ZMP(Zero Moment Point)的变化规律定义为余弦曲线,并基于三维倒
立摆的动力学原理,推导出了单脚支撑期内机器人质心轨迹方程。在此基础上,采用
样条插值函数来保证机器人质心加速度的连续性,从而提出了基于这种可变ZMP的
双足动步行关节轨迹生成方法。最后,在虚拟物理环境下利用仿真软件实现了虚拟
的3-D类人猿机器人"GOROBOT"双足动步行,验证了方法的正确性和实际类人猿
机器人"GOROBOT"的双足动步行能力。
【总页数】5页(P4000-4003)
【关键词】类人猿型机器人;可变ZMP;动步行;三维倒立摆
【作 者】吴伟国;郎跃东;梁风
【作者单位】哈尔滨工业大学机电工程学院机械设计系
【正文语种】中 文
【中图分类】TP242.6
【相关文献】
1.类人猿型机器人前向四足步行的研究 [J], 张福海;吴伟国;郎跃东
2.ZMP理论在双足步行机器人步态控制中的应用 [J], 车玲玲;王志良
3.双足机器人预观控制的ZMP补偿步行模式研究 [J], 敬成林;李祖枢;薛方正
4.基于ZMP轨迹的双足机器人步态规划及仿真 [J], 李文威;周广兵;陈再励;吴亮生
因版权原因,仅展示原文概要,查看原文内容请购买
双足仿生机器人设计与制作——机械结构设计摘要随着时代的发展,人们的生活节奏越来越快,对工作的效率更是越来越重视,而且如今的科技也在飞速发展中,所以机器人在未来人类生活中发挥着重要的作用,是我们的好帮手,它可以改善我们生活的质量,提高我们的工作效率,从而推动生产力的提高和整个社会的进步。
目前,国内外对仿生机器人的研究重视程度很高,而在仿生机器人研究领域中,双足仿生机器人是一个重要的研究课题,而且我认为它的研究价值要比轮式机器人或其他足式机器人的高。
本设计为结构简单、成本低廉、可操作性高的小型双足仿生机器人,通过仿人的腿部关节和预先设定的目标来进行自由度的分配,根据设计任务来选择驱动元件,进而通过SOLIDWORKS软件进行机械结构的三维造型设计,并且对机器人的关键零件进行有限元分析。
并且根据D-H参数法来建立运动学方程,从而进行正运动学分析。
最后设计出一个可以实现前进后退、左移右移、踏步、鞠躬、超声波避障等功能的小型双足仿生机器人。
关键词:小型双足仿生机器人;机械结构;三维造型;运动学分析;有限元分析Design and manufacture of biped bionic robot -- mechanical structuredesignAbstractAlong with the development of The Times, the pace of life of people more and more fast, working efficiency is more and more attention, and now also in the rapid development of science and technology, so the robot in the future play an important role in human life, is our good helper, it can improve the quality of our life, improve our work efficiency, so as to promote the improvement of productivity and the progress of the society as a whole. At present, the research of bionic robot is highly valued at home and abroad. In the field of bionic robot research, bipedal bionic robot is an important research topic, and I think its research value is higher than that of wheeled robot or other foot robot.This design is a small bipedal bionic robot with simple structure, low cost and high maneuverability. It distributes the degree of freedom by imitating the human leg joints and preset goals, selects the driving elements according to the design task, and then carries out the three-dimensional modeling design of the mechanical structure through SOLIDWORKS software, and carries out the finite element analysis of the key parts of the robot. And according to the D-H parameter method to establish kinematics equations, so as to carry out positive kinematics analysis. Finally, a small bipedal bionic robot is designed, which canrealize forward and backward, left and right, step, bow, ultrasonic obstacle avoidance and other functions.Keywords: Small bionic biped robot; mechanical structure; 3D modeling; kinematics analysis;finite element analysis目录1 绪论 (1)1.1双足仿生机器人的研究意义与目的 (1)1.2国内外对双足仿生机器人研究的现状 (1)2 双足仿生机器人总体方案设计与动力选择 (4)2.1双足仿生机器人的工作原理 (4)2.2结构设计 (4)2.2.1设计目标 (4)2.2.2自由度的分配和计算 (5)2.2.3设计方案分析 (7)2.2.4设计方案的选取 (8)2.3动力源 (8)2.3.1电动机的选择 (9)2.3.2舵机原理 (11)2.3.3舵机选型 (11)2.4总体设计 (12)3 机械结构设计 (12)3.1机器人结构 (12)3.2机器人零件图 (13)3.3机器人装配图 (17)4三维造型设计 (17)4.1关键零件设计与说明 (17)4.1.1机器人的腿部设计 (17)4.1.2机器人的上身设计 (21)4.1.3机器人的手臂设计 (24)4.2机器人的整体三维造型 (25)5运动学分析 (26)5.1正运动学分析 (26)5.1.1 建立机器人的运动学方程 (26)6有限元分析 (29)6.1有限元分析的意义 (29)6.2有限元分析的过程 (29)6.3分析结果 (32)7总结 (33)参考文献 (34)谢辞 ......................................................................................................................... 错误!未定义书签。
仿人双足机器人机构的设计毕业论文毕业设计中文摘要仿人双足机器人是机器人研究的前沿领域,是多种科技的结合,代表一个国家的技术水平。
仿人双足机器人最大的特征就是双足步行,因此它的灵活性很高,可以代替人类完成危险作业。
本文回顾了国内外仿人双足机器人的发展历史,在分析人类下肢结构的基础上,确定机器人机构的自由度配置、关节结构及驱动形式。
在inventor环境下进行机构的建模及装配,完成仿人双足机器人机构的设计,最后对仿人双足机器人机构进行运动模拟和强度分析,检验机构的运动性能和强度,进一步优化机构的设计。
关键词:仿人双足机器人,机构设计,运动模拟,强度分析毕业设计外文摘要TitleDesignofhumanoidbipedrobotAbstractHumanoidbipedrobotisafrontierfieldofrobotresearch,istheco mbinationofscienceandtechnology,thetechnicallevelonbehalfofa country''s.Characteristicsofhumanoidbipedrobotisthebiggestbip edwalking,soitshighflexibility,canreplacehumandodangerouswor k.Thispaperreviewsthedevelopmenthistoryofdomesticandforei gnhumanoidbipedrobot,basedonanalysisofhumanlowerlimbstructure,determinetherobotDOFconfiguration,jointstructureanddriv emode.Modelingandassemblymechanismbasedoninventor,com pletedthedesignofhumanoidbipedrobotmechanism,finallycarries ontheanalysisofmotionsimulationandstrengthofhumanoidbipedr obot,motionperformanceandthestrengthoftheinspectionorganiz ation,andfurtheroptimizethemechanismdesign.KeywordsHumanoidbipedrobot,mechanismdesign,motionsimulation,strengthanalysis目录1绪论..................................................................................................11.1课题研究的意义...........................................................................11.2国内外仿人双足机器人发展现状................................................21.3本课题研究的主要内容.............................................................112仿人双足机器人机构设计.............................................................122.1人体下肢分析.............................................................................122.2仿人双足机器人总体设计..........................................................202.3仿人双足机器人关节设计..........................................................232.4仿人双足机器人总体结构..........................................................352.5本章小结....................................................................................373机器人机构的运动模拟.................................................................383.1行走的运动模拟.........................................................................383.2蹲下的运动模拟.........................................................................413.3转弯的运动模拟.........................................................................433.4本章小结....................................................................................434机器人机构的强度分析.................................................................454.1静态强度分析.............................................................................454.2运动载荷下的强度分析.............................................................484.3本章小结....................................................................................51结论....................................................................................................52致谢.................................................................错误~未定义书签。
仿人机器人(双足步行机器人)——发展历史,第二阶段:90年代以后90年代以来,随着微电子、计算机技术的迅猛发展,仿人机器人的研制工作有了突破性的发展。
1996年本田公司推出的P2机器人[37][38]是仿人机器人研究的新纪元,实际上从WABOT-2推出一年之后,本田公司就开始秘密进行研究,期间推出了E0-E6仿人机器人,图1.2给出了本田公司仿人机器人研究的整个发展历程。
其中,P2高180cm,重210kg,自带电源,并综合采用了踝关节力矩控制、模型ZMP控制和落地位置控制技术,实现了稳定的步行运动。
之后,本田公司又于1997年推出了P3,2000年推出了ASIMO,ASIMO高120cm,重52kg,步速0~1.6km/h,采用i-walk技术(Intelligent Real-time Flexible Walking),实现了步行过程中的拐弯。
以实现与人类共存、和谐的新文化为目标,本田公司于2004年发布了新一代的ASIMO仿人机器人,实现了跑步动作,并用于办公室环境中的作业和配合人类完成部分工作[38][39]。
本田公司的仿人机器人样机研制无疑代表了当今世界上的最高水平。
日本经济产业省从1998开始组织实施“与人和谐共处的机器人系统研究开发”的HRP(Humanoid Robotics Project)计划[40-43],旨在探索仿人机器人在人类生活环境中的应用研究,其目标是在2010年实现仿人机器人能在日常环境的地面中行走,能上下楼梯和爬梯子,跨越障碍物,穿越狭窄空间以及操作物体等。
HRP-2于2002年推出,高1.54m,重58kg,配置30个自由度,可实现0~2km/h的行走速度,并针对该机器人开展了仿人机器人全身运动规划和机器人摔倒与爬起的控制技术研究[6]。
2009年3月推出的HRP-4C[43]“美女机器人”高1.58m,重43kg,配置30个自由度,除了实现稳定的行走外,更具有丰富的表情动作,并有望作为服务型机器人成为一个产业。
两足行走机器人(三维建模CAD图纸)1 绪论1.1 引言目前,机器人已形成一个不同技术层次、应用于多种环境的“庞大”家族,从天上到地下,从陆地到海洋到处都可以看到机器人的身影。
世界著名机器人专家,日本早稻田大学的加藤一郎教授曾经指出“机器人应当具有的最大的特征之一是步行功能”。
步行机器人的研究涉及到多门学科的交叉融合,如仿生学、机构学、控制理论与工程学、电子工程学、计算机科学及传感器信息融合等。
仿人形机器人正成为机器人研究中的一个热点,其研究水平,在一定程度上代表了一个国家的高科技发展水平和综合实力。
研究仿人形双足步行机器人,除了具有重要的学术意义,还有现实的应用价值。
1.2 机器人的发展及技术1.2.1 机器人的发展20 世纪 40 年代,伴随着遥控操纵器和数控制造技术的出现,关于机器人技术的研究开始出现。
60 年代美国的 Consolidated Control 公司研制出第一台机器人样机,并成立了 Unimation 公司,定型生产了 Unimate 机器人。
20 世纪 70 年代以来,工业机器人产业蓬勃兴起,机器人技术逐渐发展为专门学科。
1970 年,第一次国际机器人会议在美国举行。
经过几十年的发展,数百种不同结构、不同控制系统、不同用途的机器人已进入了实用化阶段。
目前,尽管关于机器人的定义还未统一,但一般认为机器人的发展按照从低级到高级经历了三代。
第一代机器人,主要指只能以“示教-再现”方式工作的机器人,其只能依靠人们给定的程序,重复进行各种操作。
目前的各类工业机器人大都属于第一代机器人。
第二代机器人是具有一定传感器反馈功能的机器人, 其能获取作业环境、操作对象的简单信息,通过计算机处理、分析,机器人按照己编好的程序做出一定推理,对动作进行反馈控制,表现出低级的智能。
当前,对第二代机器人的研究着重于实际应用与普及推广上。
第三代机器人是指具有环境感知能力,并能做出自主决策的自治机器人。
它具有多种感知功能,可进行复杂的逻辑思维,判断决策,在作业环境中可独立行动。
多足机器人仿真与运动参数控制方案介绍多足机器人是一种模仿生物动物的动作和行为方式设计而成的机器人,具有多个足以提供稳定性和灵活性的特点。
在机器人技术的发展过程中,多足机器人在各种应用领域中展现出巨大的潜力,如救援任务、工业生产、军事应用等。
为了使多足机器人能够具备更好的运动控制能力和仿真效果,需要设计合适的运动参数控制方案。
一、多足机器人动力学仿真方案介绍动力学仿真是指通过建立机器人的动力学模型,预测和模拟机器人在不同环境中的运动行为和稳定性。
在多足机器人的仿真过程中,需要考虑机器人的力学特性、摩擦力、惯性力等因素,并将其转化为数学模型进行计算。
通过动力学仿真,可以预测机器人在不同地形条件下的运动状态和稳定性,为设计运动参数控制方案提供准确的基础数据。
二、多足机器人运动参数控制方案介绍1. 步态规划步态规划是多足机器人运动控制的基础,它决定了机器人在运动中如何转移重心、腿部如何协调配合、步幅和步频如何调整等。
步态规划主要分为静态步态和动态步态两种,静态步态适用于相对平坦的地面,而动态步态适用于需跨越障碍物的复杂地形。
通过合理的步态规划,可以使机器人在运动中更加稳定和灵活。
2. 摆动轨迹生成摆动轨迹生成是多足机器人运动参数控制的关键,它决定了机器人腿部摆动的轨迹和姿态。
通过优化摆动轨迹生成算法,可以使机器人在运动过程中腿部运动更加平滑和协调,提高机器人的稳定性和运动效率。
3. 力矩控制力矩控制是多足机器人运动参数控制中的核心内容,通过控制机器人的关节力和力矩,可以使机器人在运动中具备更强的稳定性和运动能力。
根据机器人的力矩控制方案,可以实现机器人在不同地形下的负载平衡和动态姿态调整,提高机器人的适应性和运动精度。
4. 路径规划路径规划是多足机器人仿真与运动控制的综合应用,它通过规划机器人的移动路径,使机器人能够快速准确地达到目标位置。
在路径规划过程中,需要考虑机器人的运动限制、环境约束和任务目标等因素,并通过合理的算法来选择最优的运动路径。
双足仿生机器人行走机构设计双足仿生机器人行走机构的设计需要综合考虑机械结构、控制系统和传感器等多个方面。
下面是一个较为常见的双足仿生机器人行走机构设计的概述:1. 机械结构:双足仿生机器人的机械结构通常由两个对称的机械腿组成,每个机械腿由多个关节连接而成。
关节可以采用电机驱动,例如直线电机或旋转电机。
关节的设计需要考虑到机器人的运动范围、力矩需求以及稳定性等因素。
2. 步态规划:双足仿生机器人的步态规划是指确定机器人腿部关节的运动轨迹和步伐。
一种常见的步态是通过将机器人的步伐分为支撑相和摆动相来实现。
在支撑相,机器人的一只腿着地支撑身体重量;在摆动相,机器人的另一只腿离地向前摆动。
步态规划需要考虑到机器人的稳定性、能耗和速度等因素。
3. 动力学模型:为了实现双足仿生机器人的稳定行走,需要建立机器人的动力学模型。
动力学模型可以通过运动学和力学方程来描述机器人的运动和受力情况。
这些模型可以用于控制系统设计和运动规划。
4. 控制系统:双足仿生机器人的控制系统需要实时监测机器人的姿态、关节角度和力矩等信息,并根据预定的步态规划来控制机器人的运动。
控制系统通常包括传感器、控制算法和执行器。
传感器可以包括惯性测量单元(IMU)、压力传感器和视觉传感器等,用于获取机器人的状态信息。
控制算法可以根据传感器数据实时计算出控制指令,例如关节角度和力矩。
执行器则将控制指令转化为机械运动。
5. 传感器:双足仿生机器人的传感器可以用于感知环境和监测机器人状态。
例如,视觉传感器可以用于识别障碍物和地面形状,压力传感器可以用于检测脚底的接触力,IMU可以用于测量机器人的加速度和角速度等。
这些传感器可以提供给控制系统有关机器人周围环境和自身状态的信息,以便实现更精确的控制和导航。
以上是双足仿生机器人行走机构设计的一般概述,具体的设计还需要根据具体应用需求和机器人的尺寸、负载和预期性能等因素进行进一步详细设计和优化。