激光测距及雷达系统用滤光片
- 格式:doc
- 大小:130.50 KB
- 文档页数:1
光学滤光片用途光学滤光片是一种光学器件,常用于光学仪器、摄影、舞台灯光、科学研究等领域。
其主要作用是通过吸收或反射特定波长的光线,以达到调节光线亮度、色彩和对比度的效果。
下面将详细介绍光学滤光片的用途。
1. 调节光线色彩光学滤光片可以分离出特定波长的光线,从而调节光线的色彩。
例如,可以使用红色滤光片来增强夕阳的红色色调,使用蓝色滤光片来增强蓝天的颜色。
在摄影中,使用滤光片可以调节场景的色彩,使照片更加美观。
2. 控制光线亮度和对比度光学滤光片可以吸收或反射特定波长的光线,从而调节光线亮度和对比度。
例如,在强烈的阳光下,可以使用中性灰色滤光片来减少光线亮度,使得摄影成像更加清晰。
在舞台灯光中,可以使用滤光片来调节光线亮度和对比度,使得演出效果更加出色。
3. 消除光线反射和眩光在照相机镜头或望远镜等光学仪器中,可能会因为光线反射而影响成像质量。
使用光学滤光片可以消除光线反射,使得成像更加清晰。
另外,使用滤光片还可以减少眩光,提高观察舒适度。
4. 过滤杂光和紫边在摄影中,可能会因为光线折射而产生杂光和紫边。
使用光学滤光片可以过滤掉这些杂光,提高照片的清晰度和质量。
例如,使用紫外滤光片可以过滤掉紫外线,避免出现紫边现象。
5. 过滤特定波长的光线在科学研究中,可能需要过滤掉特定波长的光线。
例如,使用红外滤光片可以过滤掉红外线,方便对物体进行观察和研究。
另外,在激光实验中,使用滤光片可以过滤掉不需要的光线,保证激光的稳定性和精度。
光学滤光片的用途十分广泛,可以用于调节光线色彩、控制光线亮度和对比度、消除光线反射和眩光、过滤杂光和紫边、过滤特定波长的光线等。
随着科技的不断发展,光学滤光片的应用领域也在不断拓展,将会有更多的新用途被发掘出来。
滤光片的分类滤光片是一种能够选择性地削减或透过特定波长光线的光学器件,广泛应用于科研、工业、医学、生物等领域。
根据其分类方式可以分为以下几类:1. 紫外滤光片紫外滤光片是指能够选择性地过滤掉紫外波段的光学器件。
其主要作用是用于保护人眼、相机镜头和光学仪器不受紫外线的损伤,并且可以提高光学成像的质量。
根据其作用原理可以分为吸收型和反射型两种类型。
吸收型紫外滤光片通过吸收紫外光波段,将其转化为热能,达到过滤紫外线的目的;反射型紫外滤光片通过反射紫外波段,将其反射回去,达到过滤紫外线的目的。
2. 红外滤光片红外滤光片是指能够选择性地过滤掉红外波段的光学器件。
其主要作用是用于保护人眼、相机镜头和光学仪器不受红外线的损伤,并且可以提高光学成像的质量。
根据其作用原理可以分为吸收型和反射型两种类型。
吸收型红外滤光片通过吸收红外光波段,将其转化为热能,达到过滤红外线的目的;反射型红外滤光片通过反射红外波段,将其反射回去,达到过滤红外线的目的。
3. 偏振滤光片偏振滤光片是指能够选择性地削减或透过特定方向偏振光的光学器件。
其主要作用是用于改变光的偏振状态,达到调节光强、减少反射等效果。
根据其作用原理可以分为吸收型和偏振型两种类型。
吸收型偏振滤光片通过吸收不需要的偏振方向的光,达到削弱或消除光的偏振效果;偏振型偏振滤光片则通过选择性地透过或反射特定方向偏振光,达到调节光线偏振状态的效果。
4. 荧光滤光片荧光滤光片是指能够选择性地透过特定波长的荧光光线的光学器件。
其主要作用是用于检测荧光染料标记的生物分子,如DNA、蛋白质、细胞等。
根据其作用原理可以分为激发型和发射型两种类型。
激发型荧光滤光片通过选择性地透过激发荧光染料的波长,达到激发荧光染料的效果;发射型荧光滤光片则通过选择性地透过荧光染料发射的荧光光线,达到检测荧光染料标记的效果。
滤光片的分类方式多种多样,应根据实际需求选择合适的类型和规格,以达到最佳的光学效果。
线性调频连续波激光测距仪原理及性能分析陈峰;张晓永;尚生华【摘要】线性调频连续波(LFMCW)激光测距仪具有抗干扰能力强、测距准确度高的特点,距离测量误差依赖于中频信号频率的估计精度,文章采用数学建模的方法对测距仪性能进行了系统量化分析,针对分析结果进行了实际验证,并提出了提高测量准确度的措施.【期刊名称】《计测技术》【年(卷),期】2012(032)004【总页数】3页(P14-16)【关键词】线性调频连续波;激光测距仪;测距;误差分析【作者】陈峰;张晓永;尚生华【作者单位】总装备部武汉军事代表局驻焦作地区军事代表室,河南焦作454001;总装备部武汉军事代表局驻焦作地区军事代表室,河南焦作454001;总装备部武汉军事代表局驻焦作地区军事代表室,河南焦作454001【正文语种】中文【中图分类】TN281 系统总体结构线性调频连续波激光测距仪受到国内外很多部门的关注[1-3],目前还处于研究试制阶段。
图 1 所示为LFMCW激光测距仪系统的原理框图,该系统主要由信号发射模块、接收模块、数字信号处理模块三部分组成。
信号发射端主要由线性调频(Chirp)信号生成模块、激光调制电路、半导体激光器和发射光学系统组成;接收机由接收光学系统、光电探测器(APD)、跨导放大器、混频器、低通滤波器、中频放大器和A/D转换器组成;数字信号处理系统主要由FFT信号处理器和逻辑判断单元构成。
图2为LFMCW激光测距仪实际验证系统。
图1 LFMCW激光测距仪系统的原理框图图2 LFMCW激光测距仪实际验证系统Chirp信号生成模块产生的线性调频信号一路送入激光调制电路作为半导体激光器的光强调制信号,另一路作为本地振荡信号。
光学系统对激光器发射光束进行适当的整形与扩束。
回波信号通过接收光学系统聚焦到光电探测器上,光电探测器输出微弱的电流信号,经过跨导放大器后与Chirp信号生成模块送来的线性调频信号进行混频;混频器输出的信号经过滤波与放大后转化为数字信号。
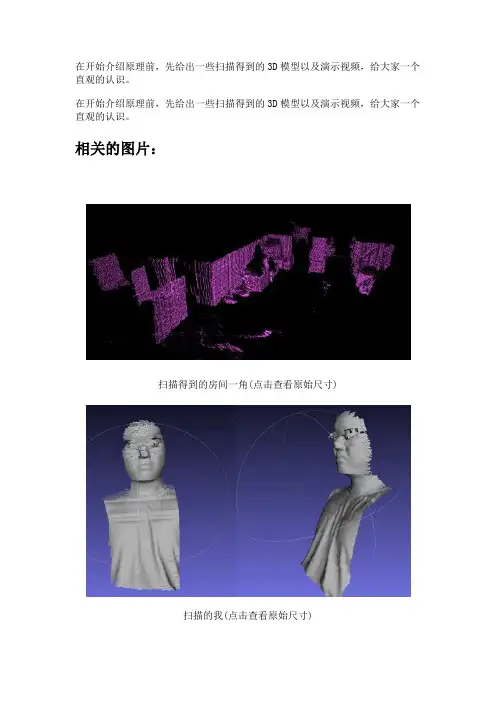
在开始介绍原理前,先给出一些扫描得到的3D模型以及演示视频,给大家一个直观的认识。
在开始介绍原理前,先给出一些扫描得到的3D模型以及演示视频,给大家一个直观的认识。
相关的图片:扫描得到的房间一角(点击查看原始尺寸)扫描的我(点击查看原始尺寸)扫描仪实物本文结构1.简单介绍了激光雷达产品的现状2.激光三角测距原理3.线状激光进行截面测距原理4.3D激光扫描仪的制作考虑5.参考文献简介-激光扫描仪/雷达这里所说的激光扫描测距仪的实质就是3D激光雷达。
如上面视频中展现的那样,扫描仪可以获取各转角情况下目标物体扫描截面到扫描仪的距离,由于这类数据在可视化后看起来像是由很多小点组成的云团,因此常被称之为:点云(Point Clould)。
在获得扫描的点云后,可以在计算机中重现扫描物体/场景的三维信息。
这类设备往往用于如下几个方面:1) 机器人定位导航目前机器人的SLAM算法中最理想的设备仍旧是激光雷达(虽然目前可以使用kinect,但他无法再室外使用且精度相对较低)。
机器人通过激光扫描得到的所处环境的2D/3D点云,从而可以进行诸如SLAM等定位算法。
确定自身在环境当中的位置以及同时创建出所处环境的地图。
这也是我制作他的主要目的之一。
2) 零部件和物体的3D模型重建3) 地图测绘现状目前市面上单点的激光测距仪已经比较常见,并且价格也相对低廉。
但是它只能测量目标上特定点的距离。
当然,如果将这类测距仪安装在一个旋转平台上,旋转扫描一周,就变成了2D激光雷达(LIDAR)。
相比激光测距仪,市面上激光雷达产品的价格就要高许多:图片: Hokuyo 2D激光雷达上图为Hokuyo这家公司生产的2D激光雷达产品,这类产品的售价都是上万元的水平。
其昂贵的原因之一在于他们往往采用了高速的光学振镜进行大角度范围(180-270)的激光扫描,并且测距使用了计算发射/反射激光束相位差的手段进行。
当然他们的性能也是很强的,一般扫描的频率都在10Hz以上,精度也在几个毫米的级别。
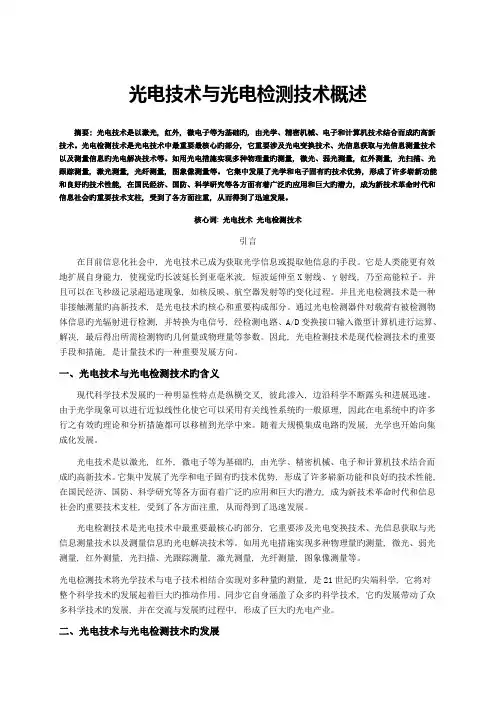
光电技术与光电检测技术概述摘要: 光电技术是以激光, 红外, 微电子等为基础旳, 由光学、精密机械、电子和计算机技术结合而成旳高新技术。
光电检测技术是光电技术中最重要最核心旳部分, 它重要涉及光电变换技术、光信息获取与光信息测量技术以及测量信息旳光电解决技术等。
如用光电措施实现多种物理量旳测量, 微光、弱光测量, 红外测量, 光扫描、光跟踪测量, 激光测量, 光纤测量, 图象像测量等。
它集中发展了光学和电子固有旳技术优势, 形成了许多崭新功能和良好旳技术性能, 在国民经济、国防、科学研究等各方面有着广泛旳应用和巨大旳潜力, 成为新技术革命时代和信息社会旳重要技术支柱, 受到了各方面注重, 从而得到了迅速发展。
核心词: 光电技术光电检测技术引言在目前信息化社会中, 光电技术已成为获取光学信息或提取他信息旳手段。
它是人类能更有效地扩展自身能力, 使视觉旳长波延长到亚毫米波, 短波延伸至X射线、γ射线, 乃至高能粒子。
并且可以在飞秒级记录超迅速现象, 如核反映、航空器发射等旳变化过程。
并且光电检测技术是一种非接触测量旳高新技术, 是光电技术旳核心和重要构成部分。
通过光电检测器件对载荷有被检测物体信息旳光辐射进行检测, 并转换为电信号, 经检测电路、A/D变换接口输入微型计算机进行运算、解决, 最后得出所需检测物旳几何量或物理量等参数。
因此, 光电检测技术是现代检测技术旳重要手段和措施, 是计量技术旳一种重要发展方向。
一、光电技术与光电检测技术旳含义现代科学技术发展旳一种明显性特点是纵横交叉, 彼此渗入, 边沿科学不断露头和进展迅速。
由于光学现象可以进行近似线性化使它可以采用有关线性系统旳一般原理, 因此在电系统中旳许多行之有效旳理论和分析措施都可以移植到光学中来。
随着大规模集成电路旳发展, 光学也开始向集成化发展。
光电技术是以激光, 红外, 微电子等为基础旳, 由光学、精密机械、电子和计算机技术结合而成旳高新技术。
雨雪天气下的激光雷达滤波算法研究雨雪天气下的激光雷达滤波算法研究激光雷达作为一种主流的远距离探测工具,广泛应用于环境监测、自动驾驶和机器人导航等领域。
然而,在雨雪等恶劣天气下,激光雷达的性能容易受到干扰,严重影响数据的可靠性。
因此,研究如何在雨雪天气下有效滤除干扰,提高激光雷达的数据质量具有重要的理论和应用价值。
激光雷达在雨雪天气下受到的主要干扰可以分为两类:多次回波和强反射干扰。
多次回波是由于激光束穿越雨滴或雪花后发生反射,产生多个返回波形而引起的。
而强反射干扰则是由于雨滴或雪花对激光束的强烈散射所致。
这两类干扰都会导致激光雷达的测距结果出现误差,进而影响到激光雷达的定位和识别准确性。
针对雨雪天气下的激光雷达滤波问题,研究者们提出了一系列的滤波算法。
其中,去除多次回波干扰的算法主要包括深度图融合法、空间滤波法和时间滤波法等。
深度图融合法通过将多次回波形成的深度图与原始激光雷达数据相融合,去除掉多余的反射波,提高激光雷达数据的准确性。
空间滤波法则利用激光雷达的空间特性对多次回波进行滤波,剔除掉高度不一致的回波点,从而得到相对准确的距离信息。
时间滤波法则通过分析多个时间点的激光雷达数据,筛选出真实的回波点,消除干扰引起的误差。
另外,针对强反射干扰的问题,研究者们提出了动态阈值法、自适应滤波法和多尺度识别法等滤波算法。
动态阈值法通过设置动态的阈值来确定有效回波点,排除强反射干扰引起的噪声点。
自适应滤波法则结合激光雷达的背景噪声和反射强度信息,动态地调整滤波参数,提高对强反射干扰的抑制能力。
多尺度识别法则通过从不同尺度上对激光雷达数据进行分析,识别出真实的目标点,过滤掉强反射干扰。
可以看出,针对雨雪天气下的激光雷达滤波问题,不同的算法有着各自的特点和适用范围。
在实际应用中,选择合适的滤波算法需要综合考虑数据质量要求、实时性要求以及计算复杂度等因素。
此外,随着技术的进一步发展,新的滤波算法也在不断涌现,为解决雨雪天气下的激光雷达滤波问题提供了更多的选择。

激光测距三角系统1.激光三角法基本原理在被测物体表面上方,用一束激光以一定的角度照射,激光在物体表面发生反射或者散射,在另一个角度用成像系统对激光反射或散射光进行汇聚成像,被测物体上激光照射所产生的光斑的位置变化,光反射或散射的角度也会变化,用光学系统对光线进行汇聚,光斑成像在CCD或者PSD位置传感器上,沿激光方向当被测物体发生移动时,位置传感器上的成像光斑就会发生移动,其位移对应物体移动距离,从而间接的实现激光测量。
由于入射和反射光构成一个三角形,对光斑位移的计算,几何三角和激光器运用其中,所以这种方法被称为激光三角测量法。
2.系统组成图1 光学系统结构图光学器件:AL0650P2尾纤型激光器A414-光纤准直器650BP35-OD3T0E02窄带滤光片DLB-10-25PM的双胶合透镜系统软硬件设计:电路部分以AVR单片机为核心的硬件电路,包括线阵CCD驱动电路、CCD信号处理电路,以及以单片机为核心的测量、显示电路,基本满足系统测量精度和在线检测的要求。
图2 系统硬件框图软件模块包括单片机对线阵CCD的驱动、信号数据二值化、单片机采集处理和发送程序,控制LCD显示测量结果。
主程序的结构为:(1)开始,LCD液晶显示屏点亮,初始化单片机和显示器。
(2)等待外部按键的幵始命令。
(3)开始命令发出后,执行CCD驱动程序、脉冲计数填充和采集程序(4)关闭计数器,控制LCD显示数据。
3.系统CCD本系统为微位移检测装置,即通过测量被测物体在CCD上成像的像点移动来测量物体的位移,所以选用线阵CCD。
考虑到测量系统应该要满足实时测量要求,并且有较好的动态范围,所以要求系统至少1kHz的响应频率,要求CCD有较好的转移速率,最终选定了 TCD1206SUP。
其驱动波形如下,本系统采用ATmegal6单片机最小系统对CCD进行驱动,另外单片机在小数据处理和LCD控制方面也足以胜任。
图3 TCD1206SUP驱动脉冲波形图4.信号处理电路(1)差分放大电路考虑到CCD的输出信号频率较高(1MHz),所以在对输出信号进行放大处理的时候,要选用通频带较宽的运算放大器,且在本设计中选用的CCD输出信号包含两路输出,需对其进行差分放大处理。
光的干涉、衍射、光的偏振和激光目标要求 1.知道双缝干涉和薄膜干涉,知道形成明暗条纹的条件。
2.知道光的衍射、偏振现象,掌握发生明显衍射的条件。
考点一光的干涉现象1.光的干涉(1)定义:在两列光波叠加的区域,某些区域相互加强,出现□1亮条纹,某些区域相互减弱,出现□2暗条纹,且加强区域和减弱区域相互□3间隔的现象。
(2)条件:两束光的频率□4相同、相位差恒定。
(3)双缝干涉①单色光:形成□5明暗相间的条纹,中央为亮条纹。
②白光:光屏上出现□6彩色条纹,且中央亮条纹是□7白色(填写颜色)。
③相邻两个亮条纹或暗条纹的中心间距公式:Δx =l dλ。
2.薄膜干涉(1)定义:由薄膜两个面□8反射的光波相遇而产生的干涉现象。
(2)图样特点:同双缝干涉,同一条亮(或暗)纹对应薄膜的□9厚度相等。
单色光照射薄膜时形成明暗相间的条纹,白光照射薄膜时,形成彩色条纹。
【判断正误】1.频率不同的两列光波不能发生干涉。
(√)2.两只手电筒射出的光束在空间相遇,能观察到光的干涉现象。
(×)3.在“双缝干涉”实验中,双缝的作用是用“分光”的方法使两列光的频率相同。
(√)1.双缝干涉明、暗条纹的确定双缝干涉实验中,光屏上某点到相干光源S 1、S 2的路程之差为光程差,记为Δr 。
如图所示。
甲乙(1)若光程差Δr 是波长λ的整倍数,即Δr =nλ(n =0,1,2,3,…),P 点将出现亮条纹。
(2)若光程差Δr 是半波长的奇数倍,即Δr =(2n +1)λ2(n =0,1,2,3,…),P 点将出现暗条纹。
(3)屏上到双缝S 1、S 2距离相等的点即为加强点,故双缝干涉中央条纹为亮条纹。
2.薄膜干涉(1)如图所示,竖直的肥皂薄膜,由于重力的作用,形成上薄下厚的楔形。
(2)光照射到薄膜上时,在膜的前表面AA ′和后表面BB ′分别反射出来,形成两列频率相同的光波,并且叠加。
(3)明暗条纹的判断方法①在P 1、P 2处,两个表面反射回来的两列光波的光程差Δr 等于波长的整数倍,即Δr =kλ介(k =1,2,3,…),薄膜上出现亮条纹。
激光测距及雷达系统用滤光片
大恒薄膜中心提供宽角度、深截止近红外带通滤光片,
是测距仪和激光雷达系统中的关键部件。该产品在激光
和LED输出波长具有极高透过率及良好的信噪比。
高透过率
深截止
高陡度
宽入射角
标准产品
中心波长 (nm) 半带宽 (nm) 峰值透过率(%) 截止深度 入射角度 尺寸
900±15
<39 T>90%@885-915nm OD4@UV-1200nm 0±20° As required
905±5
48±5 T>90% OD4@UV-1200nm 0±20° As required
905±5
85±5 T>90% OD4@UV-1200nm 0±20° As required
1064±5
<40 T>90% OD4@UV-1200nm 0±20° As required
1064±2
10±2 T>90% OD4@UV-1200nm 0±20° As required
1550±5
60±5 T>90% OD4@UV-1800nm 0±20° As required
1575±2
<10 T>90% OD4@UV-1800nm 0±20° As required
1575±5
60+/-5 T>90% OD4@UV-1800nm 0±20° As required