四象限位置测量系统设计实验
- 格式:doc
- 大小:4.31 MB
- 文档页数:11
文章编号:1002-2082(2008)04-0493-05四象限光电检测系统的定位算法研究及改进余 峰1,何 烨2,李 松2,张继涛2(1.武汉武大卓越科技有限责任公司,湖北武汉430223;2.武汉大学电子信息学院,湖北武汉430079)摘 要: 在相同硬件条件下,四象限光电检测系统的线性区间和响应灵敏度等会因算法不同而产生差异。
首先分析光斑定位的常用算法,通过数值积分和曲线拟合得出具有高斯分布的激光光斑位移量在不同算法下的修正曲线,设计制作了一套精度较高的数字式四象限光电定位系统,并使用该系统验证了理论推导结果。
关键词: 激光技术;四象限光电检测系统;算法研究;数值积分中图分类号:T N 247;T L 814 文献标志码:AImprovement of positioning algorithm for four -quadrant optoelectronic detection systemYU Feng 1,HE Ye 2,LI Song 2,ZHANG Ji-tao 2(1.W uhan W uda Z oyo n Science and T echno log y Co.L td,Wuhan 430223,China;2.Electr onic Info rmation Schoo l,Wuhan U niver sity ,W uhan 430079,China)Abstract :Under the same hardw are conditio ns ,the system atic characteristics such as the linear area and the r esponsiv ity of a four-quadrant optoelectr onic detector changes as the algo rithm changes.T he com mon alg orithms for laser spot positioning w ere analyzed.T he co rrection curves fo r the displacement o f Gauss laser spo t were deduced w ith tw o -dimensional numerical integration and curve fitting ,and a hig h -precision digital fo ur -quadrant optoelectronic po sition detection system was desig ned and fabricated.T he theor etically deduced result w as verfied by the detection system.Key words :laser technique ;four -quadrant optoeletronic detection system ;alg orithm analysis ;num erical integr ation引言四象限光电探测器是以光导模式工作的光伏探测器件。
基于LabVIEW的四象限光电探测器数据采集系统设计冯强;耿爱辉【摘要】设计了一种用于进行激光光束校准的四象限光电探测器数据采集系统.在硬件设计中,采用高速的模数转换芯片ADS7864对信号进行采样;同时,使用高速数据处理器TMS320F2812进行数据处理,保证了数据采样精度和数据处理的速度.计算机显示界面程序采用NI公司的图形化编程软件labVIEW编写,用户显示界面信息丰富而且美观.通过使用四象限探测器对长波红外激光的采样实验,可以看出在四象限探测器上照射的红外激光位置与在labview界面上显示的光斑位置一致.实验表明,本数据采集系统具有结构简单、数据采集精度高、数据读取方便、人机界面友好等特点,可以满足对激光光束校准的要求.【期刊名称】《计算机测量与控制》【年(卷),期】2013(021)005【总页数】4页(P1397-1399,1403)【关键词】四象限光电探测器;DSP;数据采集;LabVIEW【作者】冯强;耿爱辉【作者单位】中国科学院长春光学精密机械与物理研究所,长春 130033;中国科学院长春光学精密机械与物理研究所,长春 130033【正文语种】中文【中图分类】TP3320 引言四象限光电探测器是一种基于光生伏特效应的光电位置传感器。
它是将4个性能相同的光电位置敏感器件以直角坐标系的形式排列而成的。
它可以用来确定光点在二维平面上的位置坐标,被广泛的应用在激光制导、光电定位、跟踪及激光准直等领域中。
本文针对某工程项目中的红外激光光束对准系统,设计了一种基于四象限光电探测器的数据采集系统。
本数据采集系统是将四象限光电探测器接收到的红外激光信号通过一块数据采集卡将模拟的光电信号转换为数字信号,并通过串口将采集后的数据传输至计算机上进行显示、分析和存储,然后系统再根据计算机处理后的数据对激光光束进行对准校正。
1 四象限光电探测器的工作原理四象限光电探测器是一种将光信号转换成电信号的传感器。
基于四象限探测的激光跟踪系统的设计与实现刘思鸣;何宁;邓德迎【摘要】为提高激光目标系统跟踪能力,提出了一种基于四象限探测的激光跟踪系统.采用四象限探测器完成光斑位置检测与目标信息接收,分析传感器光照位置的输出电流误差变化与光斑偏离光敏面中心坐标对应关系,感知和判断目标方位及运动方向,通过伺服系统的闭环控制方法,实现激光快速跟踪,利用上位机对被跟踪目标的方位信息进行图形监测.实验测试表明,采用四象限光电检测构建的激光目标伺服跟踪系统,能快速搜寻锁定目标,并实施激光指向干扰,在目标位置±20°移动变化时,系统跟踪误差约为0.1%,跟踪速度达到22.6°/s,实验结果为激光跟踪的实际应用提供一定参考价值.【期刊名称】《桂林电子科技大学学报》【年(卷),期】2019(039)001【总页数】5页(P7-11)【关键词】光电探测;位置传感;激光跟踪;伺服控制【作者】刘思鸣;何宁;邓德迎【作者单位】桂林电子科技大学信息与通信学院,广西桂林 541004;桂林电子科技大学信息与通信学院,广西桂林 541004;桂林电子科技大学信息与通信学院,广西桂林 541004;桂林航天工业学院广西高校无人机遥测重点实验室,广西桂林541004【正文语种】中文【中图分类】TN249激光跟踪具有高精度、无导轨、大范围、实时动态等优点,它集计算技术、电子技术、精密机械、控制技术于一体,在激光制导领域有着广泛应用[1]。
激光跟踪是实现激光精确制导的基础,经过四十多年的快速发展,激光制导技术和各种激光制导武器已成为高科技的现代和未来战争克敌制胜的重要手段,其中激光制导武器系统具有制导精度高、抗干扰能力强、结构简单、成本低等优势,因而各军事大国都竞相开展研制[2]。
针对激光跟踪系统快速对准能力问题,应用位置传感器完成光斑位置检测与信息接收,通过平衡状态误差分析,采用伺服系统控制实现激光目标的快速跟踪,经实验测试,系统能获取跟踪目标的方位信息,并利用干扰激光对跟踪目标实现锁定指向,为系统应用研究奠定基础。
大视场四象限探测光学系统设计
大视场四象限探测光学系统是一种广角、高分辨率的光学系统,在多
个领域中具有广阔的应用前景,比如遥感、天文学、医学影像等。
在本文中,将探讨大视场四象限探测光学系统的设计原理、关键技术和性能参数。
以下是一份超过1200字的文章:
导言:
大视场四象限探测光学系统是一种具有广角、高分辨率和快速采集能
力的光学传感系统,可以用于在大区域内进行高精度的目标探测和图像采集。
这种光学系统不仅在军事领域中具有重要应用,还可以在地质勘探、
遥感、天文学、医学影像等领域发挥重要作用。
大视场四象限探测光学系统设计薛珮瑶;吴耀;冯茜;李川【摘要】In order to realize large field laser detecting and tracking , the characteristics of optical system are analyzed.First, based on the requirement of light spots uniformity for four-quadrant detector and system inde-xes, the premium structure of optical system is selected and the method of aberration correcting is presented . Then the large field optical system for four-quadrant detector is designed by using the ZEMAX software .The light spots quality is evaluated by the spot diagram , footprint and encircled energy while the distribution of the rays illuminance on the quadrant detector is obtained by TRACEPRO software .Finally, manufacture and as-sembly for the optical system are finished and optical performance is tested based on designingresult .Testing results indicate that linear field of laser detection system is 6 degree and precision of angle measurement is less than 0.15degree.Testing curve is consistent with theoretical curve , which validates correction of the design .%为了实现大视场激光探测跟踪,分析了大视场激光探测光学系统的研制特点。
基于四象限光位置检测器的同步光位置测量系统顾黎明;孙葆根;申超波;卢平;王季刚;王晓辉;唐雷雷;肖云云【期刊名称】《强激光与粒子束》【年(卷),期】2010(022)012【摘要】为了克服现有双丝型检测器无法进行水平、垂直两个方向同时测量同步光位置的缺点,合肥光源新研制了基于四象限光位置检测器的同步光位置测量系统,并使用对数比处理技术进行后续的数据处理.通过分别对光学成像系统和四象限光位置检测器的标定,最终得到基于四象限光位置检测器的光位置测量系统的性能参数为:水平方向灵敏度0.471 2 mm-1,线性范围为±1.83 mm,垂直方向灵敏度0.635 0 mm-1,线性范围±1.32 mm.与合肥光源现有的光位置测量系统相比,具有较高的性价比.【总页数】5页(P2964-2968)【作者】顾黎明;孙葆根;申超波;卢平;王季刚;王晓辉;唐雷雷;肖云云【作者单位】中国科学技术大学,国家同步辐射实验室,合肥,230029;中国科学技术大学,国家同步辐射实验室,合肥,230029;中国科学技术大学,国家同步辐射实验室,合肥,230029;中国科学技术大学,国家同步辐射实验室,合肥,230029;中国科学技术大学,国家同步辐射实验室,合肥,230029;中国科学技术大学,国家同步辐射实验室,合肥,230029;中国科学技术大学,国家同步辐射实验室,合肥,230029;中国科学技术大学,国家同步辐射实验室,合肥,230029【正文语种】中文【中图分类】TL594;TL506【相关文献】1.Libera Photon在合肥光源同步光位置测量系统中的应用 [J], 顾黎明;孙葆根;杨永良;卢平;肖云云;王季刚;唐雷雷2.一种带有弹簧的丝型同步光位置检测器 [J], 林顺富;孙葆根;高辉;卢平;申超波;鲍循3.采用对数比处理技术的同步光位置测量系统 [J], 林顺富;孙葆根;高辉;卢平4.基于FPGA的激光位移测量系统设计 [J], 李家奇;李静5.基于二维激光位移传感器的通过式轮对测量系统设计 [J], 伍川辉;尹纪磊;郭辉;闫磊因版权原因,仅展示原文概要,查看原文内容请购买。
四象限探测器定位精度的分析与仿真宋哲宇;付芸;范新坤;吴凯【摘要】In order to study the tracking accuracy of four-quadrant(QD)detectors in space laser communication sys-tems and the effects of spot characteristics and external environment on detectors,at first,the principle of four-quad-rant detector flare detection is deduced through the theory,the effects of facula size,facula centroid position,back-ground light,facula energy distribution,dead-area and the SNR are simulated and analyzed. The results show that the sensitivity of the position detection is reduced with the increase of the facular size. The facula energy distribution,back-ground light and dead-area will have an effect on the detection accuracy of the spot position;and the improvement of the signal-to-noise ratio can improve the position detection accuracy.%为了研究影响四象限探测器(QD)在空间激光通信系统中的跟踪精度,以及光斑特性和外部环境对探测器的影响.首先理论推导了四象限探测器光斑检测的原理,然后对光斑半径、光斑位置、背景光、光斑能量分布、死区、系统信噪比等因素进行了仿真分析.研究结果表明,光斑半径的增加会降低四象限探测器的位置探测灵敏度.光斑能量分布、背景光和死区会对光斑位置检测精度产生影响,系统信噪比的提高可以提高位置检测精度.【期刊名称】《长春理工大学学报(自然科学版)》【年(卷),期】2018(041)002【总页数】4页(P41-44)【关键词】背景光;光通信;建模;仿真;信噪比【作者】宋哲宇;付芸;范新坤;吴凯【作者单位】长春理工大学光电工程学院,长春130022;长春理工大学光电工程学院,长春130022;长春理工大学光电工程学院,长春130022;长春理工大学光电工程学院,长春130022【正文语种】中文【中图分类】TN929.1四象限探测器(QD)具有响应快、动态范围宽、灵敏度高、体积小等特点,广泛应用在光电跟踪领域[1]。
测量的坐标象限引言在数学和物理学中,我们经常会遇到需要测量物体或现象的位置和方向的需求。
为了更准确地描述位置和方向,我们引入了坐标系的概念。
坐标系由一组数轴和原点组成,可以用来表示空间中的位置和方向。
在二维平面上,我们通常使用直角坐标系,也称为笛卡尔坐标系。
笛卡尔坐标系由两条互相垂直的数轴(x轴和y轴)和一个原点组成。
根据x轴和y轴上的正负标记,我们可以将平面分成四个象限。
本文将介绍测量的坐标象限及其特点。
坐标象限笛卡尔坐标系将平面划分成四个象限,分别用罗马数字I、II、III、IV表示。
每个象限都有一些特点,这些特点有助于我们更好地理解和描述物体或现象的位置。
第一象限(I)第一象限是位于x轴正半轴和y轴正半轴之间的区域。
在第一象限中,x轴的数值为正,y轴的数值为正。
这意味着第一象限中的点的x坐标和y坐标都大于零。
因此,第一象限被认为是坐标值都为正的象限。
在数学中,第一象限通常用来表示正数。
第二象限(II)第二象限位于x轴负半轴和y轴正半轴之间的区域。
在第二象限中,x轴的数值为负,y轴的数值为正。
这意味着第二象限中的点的x坐标为负,y坐标为正。
因此,第二象限被认为是x坐标为负、y坐标为正的象限。
在数学中,第二象限通常用来表示负y值。
第三象限(III)第三象限位于x轴负半轴和y轴负半轴之间的区域。
在第三象限中,x轴的数值为负,y轴的数值为负。
这意味着第三象限中的点的x坐标和y坐标都为负。
因此,第三象限被认为是坐标值都为负的象限。
在数学中,第三象限通常用来表示负数。
第四象限(IV)第四象限位于x轴正半轴和y轴负半轴之间的区域。
在第四象限中,x轴的数值为正,y轴的数值为负。
这意味着第四象限中的点的x坐标为正,y坐标为负。
因此,第四象限被认为是x坐标为正、y坐标为负的象限。
在数学中,第四象限通常用来表示负x值。
应用举例坐标象限的概念在实际应用中具有重要意义。
以下是一些应用举例:地理定位在地理学和导航系统中,我们经常使用坐标系来确定地理位置。
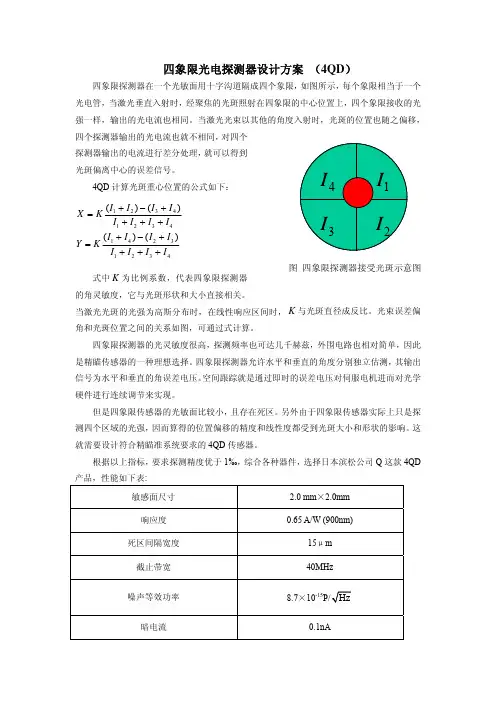
四象限光电探测器设计方案 (4QD )四象限探测器在一个光敏面用十字沟道隔成四个象限,如图所示,每个象限相当于一个光电管,当激光垂直入射时,经聚焦的光斑照射在四象限的中心位置上,四个象限接收的光强一样,输出的光电流也相同。
当激光光束以其他的角度入射时,光斑的位置也随之偏移,四个探测器输出的光电流也就不相同,对四个探测器输出的电流进行差分处理,就可以得到光斑偏离中心的误差信号。
4QD 计算光斑重心位置的公式如下: 1234123414231234()()()()I I I I X KI I I I I I I I Y K I I I I +−+=++++−+=+++式中K 为比例系数,代表四象限探测器的角灵敏度,它与光斑形状和大小直接相关。
当激光光斑的光强为高斯分布时,在线性响应区间时,K 与光斑直径成反比。
光束误差偏角和光斑位置之间的关系如图,可通过式计算。
四象限探测器的光灵敏度很高,探测频率也可达几千赫兹,外围电路也相对简单,因此是精瞄传感器的一种理想选择。
四象限探测器允许水平和垂直的角度分别独立估测,其输出信号为水平和垂直的角误差电压。
空间跟踪就是通过即时的误差电压对伺服电机进而对光学硬件进行连续调节来实现。
但是四象限传感器的光敏面比较小,且存在死区。
另外由于四象限传感器实际上只是探测四个区域的光强,因而算得的位置偏移的精度和线性度都受到光斑大小和形状的影响。
这就需要设计符合精瞄准系统要求的4QD 传感器。
根据以上指标,要求探测精度优于1‰,综合各种器件,选择日本滨松公司Q 这款4QD图 四象限探测器接受光斑示意图表 4QD S-6695-01性能指标[14]2.4.2 4QD 的电路设计由于4QD 输出的是弱的电流信号,而AD 采集的通常是0-5V 的模拟电压信号,因此需要经过后续电路的I/V 转化和信号调理。
电路的要求是符合带宽条件下的高精度的运算放大电路:首先要满足带宽的需要,保证4QD 电路高的采样能力;第二要求4QD 四个象限的放大倍数较精确的相等,保证四个象限的光电转化输出效率相同;第三要求放大器还应能够抑制传感器上的高频噪声,减少传感器噪声[17]。
使用四象限探测器测量微小位移朱梦实;张权;李元旭;向霄;陈俊康;赵伟;黄环;朱玲【摘要】四象限探测器的工作原理是光生伏特效应,通过4个象限电势的变化可算出光源的位移.使用四象限探测器测量了光源横向和纵向的位移,分析了实验误差的来源并给出了修正方法,实验结果表明,四象限探测器测量位移具有较高的测量精度和较短的时间响应,纵向测量的灵敏度比横向测量的灵敏度低.【期刊名称】《物理实验》【年(卷),期】2013(033)001【总页数】4页(P8-11)【关键词】四象限探测器;微小位移;横向测量;纵向测量【作者】朱梦实;张权;李元旭;向霄;陈俊康;赵伟;黄环;朱玲【作者单位】中国科学技术大学物理学院,安徽合肥230026;中国科学技术大学物理学院,安徽合肥230026;中国科学技术大学物理学院,安徽合肥230026;中国科学技术大学物理学院,安徽合肥230026;中国科学技术大学物理学院,安徽合肥230026;中国科学技术大学物理学院,安徽合肥230026;中国科学技术大学物理学院,安徽合肥230026;中国科学技术大学物理学院,安徽合肥230026【正文语种】中文【中图分类】TH8221 引言探测微小位移是工程界一直在研究的热门方向,如今探测微小位移也已经有了诸多手段,比如利用CCD探头测距,其优点在于不需直接接触物体,可以进行远距离测量,但存在后期图像处理工作过于复杂的问题,从而使得产品体积过大,工作环境受到限制[1-2].四象限探测器具有较高的位移测量精度和较短的时间响应.四象限探测器已广泛应用于军事和民用,如光学制导炮弹,装载在太阳能电池板上实时追踪太阳等.本文从理论上对四象限探测器作简要分析,并通过实验探究了四象限探测器在测量微小位移的应用.2 基本原理及实验仪器四象限探测器是利用集成电路光刻技术将1个圆形的光敏面窗口分割成4个面积相等、形状相同、位置对称的象限[1-3],如图1(a)所示.每个象限就是1个光电器件,能够产生光生伏特效应.照射在光敏面上的光斑被4个象限分成4个部分,对应在电极产生电势A,B,C,D.当光斑在四象限探测器上移动时,各象限受光面积发生变化,从而引起4个象限电势的变化.通过后端4个象限电势的变化可以推算出光源的位移[2,4].实验采用的四象限探测器的型号为BOSS066A[图1(b)],波长范围为600~1 000nm,使用波长632.8nm的氦氖激光器[5].其他主要仪器:滤光片(50%),扩束镜,凸透镜(焦距12cm),柱面透镜(半径4.5cm),凯瑟琳表及千分尺.图1 四象限探测器结构示意图3 实验测量3.1 横向测量光路如图2所示,探头摆放方式如图3所示.横向移动激光器,探头四象限窗面上的光斑会发生相应的移动.对圆形光斑进行如图4情形的近似,则可获得X或Y方向的位移量表达式[6]:式中A,B,C,D为四象限探测器各象限的输出电压值.图2 横向测量光路图3 探头摆放方式1图4 光斑近似情形1移动光源,测得如图5所示一系列实验数据,图中ΔU/U0为电压幅值比简称比幅,对图中线性区域拟合,可以看出实验中的线性测量范围为X∈(0.09,0.27)mm.可见其测量范围是非常小的,其原因为:1)扩束器、凸透镜口径较小,光源横移过程中会遮挡光斑;图5 横向测量拟合曲线2)由于成像系统的放大作用,光斑横移量比光源移动量大很多,光斑较快移出探头的有效测量范围.令M=,由图5得到横向定标关系式为(2)式中斜率反映了灵敏度,斜率的绝对值越大,灵敏度越高.进一步推得横向位移X的测量公式:式中将理论计算位移与实际测量位移作比较可得表1.从测量结果可以看出,四象限探测器在测量范围内的灵敏度还是非常高的.表1 横向位移探测器测量X′与千分尺测量X比较X/mm X′/mm Er 0.250 0.242 0.040 0.170 0.183 0.058 0.200 0.198 0.0103.2 纵向测量为了方便纵向测量,在探测器前放置了柱面透镜,光路如图6所示.图7为纵向测量时的探头摆放方式.纵向移动激光器,四象限窗面上的光斑会发生如图8和图9所示的形变,但其中心位置保持不变.图6 纵向测量光路图7 探头摆放方式2图8 光斑近似情形2图9 纵向测量时的光斑移动按照图8,将框内的光斑近似矩形[4],则纵向位移量表示为由图9看出,在纵向测量过程中,光斑产生了较为明显的形变,其中形变大小受到探头尺寸和测量精度要求的制约,根据BOS-S066A的尺寸,光斑的横纵距离均不得超过(0,5)mm.纵向移动光源,测得一系列数据,绘出散点图并拟合,如图10所示.图10 纵向测量拟合曲线图实验中发现在纵向测量时,测量范围非常大,已经超过了10mm,而从这段测量中我们已经得到想要的结果,因此没有必要进行更大范围的测量.记比幅为M,得到纵向定标关系式为进一步推得纵向位移的测量公式为将理论计算位移与实际测量位移作比较,可以获得测量结果见表2.表2 纵向位移探测器测量Z′与千分尺测量Z比较Z/mm Z′/mm Er 2.5002.499 0.000 4 00 93.200 3.203 0.0 0.500 0.511 0.02由测量结果可以看出,纵向位移测量不仅测量范围大,还具有较高的测量精度.从实验中得到纵向的测量范围大于10mm,其线性区间也较大,实验中只要光斑的大小不超出5mm×5m m的正方形格子,都能得到较为准确的测量结果.我们注意到,纵向的测量范围要比横向大很多.其原因在于纵向测量恰好克服了制约横向测量范围的2个问题.但是,纵向测量的灵敏度比横向测量低很多,这主要是由于柱面透镜的成像特点使得小范围移动中光斑形变太明显.这表明用四象限探测器作微小位移的测量时测量范围与测量精度会相互制约.4 误差分析及修正本次实验的误差主要来自光学方面.光源的均匀性、成像系统的质量、光路调节误差以及光斑在探测面上的复杂作用都对实验结果有影响[7].还有,由于理论分析是建立在均匀强度分布的光斑基础上,而实验中使用的激光器得到的为高斯光斑,光强为中间强、边缘弱(图11).但由于实验中光斑会聚得很小,半径大致在1mm,这种影响也是有限的,可以根据高斯光斑特性进行理论修正为已知I=I0e-r2/2,其中,I为距光斑中心r处的光强,I0 为中心光强值,Ui∝Ii,但此时Ii为光斑中心位置(x,y)的函数,代入式(1)和(2)中可以数值计算电压比幅与x,y的关系曲线.由于光斑光强中间强边缘弱,在探头中心区域的灵敏度会明显高于均匀光斑的情况.图11 高斯光斑图另一方面,理论分析时将探头的探测面视为完整平面,但实际上四象限探测器4个探测面间存在狭缝,会给光斑的测量带来误差.如图12所示如果知道狭缝宽度2D,可以计算出光斑在不同位置时落到狭缝上的面积为在计算中扣除Vx即可修正其影响[8].图12 狭缝修正示意图5 结束语本实验对于四象限探测器的特性进行了探究,并探讨了四象限探测器在测量微小位移上的应用.四象限探测器在测量微小位移上有着较高的精度,并且有较好的实时性.实际应用中一般将四象限探测器及相关的成像光具组封装在一起,配合放大电路、滤波电路及数模转换电路可得到实时的目标位移数据,很适合用于动态的高精度位置测量.【相关文献】[1]江月松.光电技术与实验[M].北京:北京理工大学出版社,2000.[2]孙峰,黄开仁,张鑫,等.四象限探测器光斑尺寸测量方法的研究[J].光学与光电技术,2010,8(1):23-25.[3]徐代升.四象限探测系统信息光斑的优化设计[J].湖南理工学院学报(自然科学版),2007,20(1):50-53,90.[4]莫才平,高新江,王兵.InGaAs四象限探测器[J].半导体光电,2004,25(1):19-21. [5]BOS-SO66ASi Photodiode array BOSER TECHNOLOGY [Z].[6]张志峰,余涛,苏展,等.象光斑和四象限探测器象限面积大小关系的理论研究[J].光子技术,2005(3):128-130.[7]Li Dashe,Liu Shue.Research on four-quadrant detector and its precise detection [J].International Journal of Digital Content Technology and Its Applications,2011(5):4.[8]谢嘉宁,黄义清,陈东平,等.光指针式微小位移测量仪[J].物理实验,2007,27(8):16-18.。
测量坐标轴的象限位置引言在数学和物理学中,我们经常需要确定一个点在坐标轴中的位置。
坐标轴通常被分为四个象限,每个象限都有不同的特征。
测量坐标轴的象限位置是一个基本的数学技巧,它不仅在学术研究中有应用,而且在实际生活中也有很多实用的场景。
本文将介绍如何测量坐标轴的象限位置并提供一些实例。
方法1.给定一个点P(x, y),首先我们需要确定x和y的值。
x代表点P在水平方向上的位置,y代表点P在垂直方向上的位置。
2.如果x和y都是正数,那么点P位于第一象限。
第一象限的特征是x和y的值都大于零。
3.如果x是负数而y是正数,那么点P位于第二象限。
第二象限的特征是x的值小于零而y的值大于零。
4.如果x和y都是负数,那么点P位于第三象限。
第三象限的特征是x和y的值都小于零。
5.如果x是正数而y是负数,那么点P位于第四象限。
第四象限的特征是x的值大于零而y的值小于零。
实例示例一假设有一个点A(3, 4)。
我们可以使用上述方法来确定这个点在坐标轴中的位置。
•因为x和y都是正数,所以点A位于第一象限。
示例二现在我们来考虑一个点B(-2, 5)。
•因为x是负数而y是正数,所以点B位于第二象限。
示例三接下来考虑一个点C(-4, -3)。
•因为x和y都是负数,所以点C位于第三象限。
示例四最后我们考虑一个点D(6, -1)。
•因为x是正数而y是负数,所以点D位于第四象限。
结论通过测量坐标轴的象限位置,我们可以更好地理解一个点在坐标轴中的位置。
这对于解决数学问题以及在现实生活中定位事物都非常有帮助。
通过确定一个点在坐标轴的象限位置,我们能够更好地进行空间分析和推理。
希望本文提供的方法和实例能够帮助读者更好地理解和运用坐标轴的象限位置测量技巧。
参考文献无。
光电系统设计报告设计题目:四象限位置测量系统设计实验专业班级:学生姓名:学生学号:指导教师:设计时间: 2017/12/29 1、设计题方案论证;实验采用激光器作为光源,四象限探测器作为光电探测接收器,根据电子和差式原理,实现可以直观、快速观测定位跟踪目标方位的光电定向装置,是目前应用最广泛的一种光电定向方式。
光发射电路主要由光源驱动器、光源(主要是半导体光源,包括LED、LD等)、光功率自动控制电路(APC)等部分组成。
用NE555组成的脉冲发生电路来驱动650nm的激光器。
四象限位置测量器是以光导模式工作的光伏探测器件。
它利用集成电路光刻技术将一个探测器件光敏面窗口分割成4个面积相等、形状相同、位置对称的区域而形成,4个探测区域具有基本相同的性能参数。
作为一种常用的位置敏感器件,当入射光点落在器件感光面的不同位置时,四象限探测器输出不同的电信号,通过对此电信号进行处理,可以确定入射光点在感光面上的位置。
四象限光电探测器广泛应用于激光准直、测角、自动跟踪等精密光电检测系统中,通过对光斑中心位置的精确定位来检测位移或偏角的大小。
它利用半导体材料吸收光子能量引起的电子跃迁,将光信号转换为电信号。
通常是利用集成光路光刻技术将完整的PN结光电二极管的光敏面分割成几个具有相同形状和面积、位置对称的区域,每个区域可以看作1个独立的光电探测器,其背面仍为一整片。
理想情况下每个区域都具有完全相同的性能参量。
影响四象限光电检测系统工作精度的因素主要包括外围大气环境、目标光斑大小和光斑能量分布以及系统本身采用的算法、器件响应差异和噪声所带来的四象限不均匀性。
2、各单元电路设计与分电路图绘制并分析工作原理;1、STM32F103RBT6:STM32F103RBT6/STM32F103是?ST?公司基于ARM最新Cortex-M3架构内核的32位处理器产品,内置128KB的Flash、20K的RAM、12位AD、4个16位定时器、3路USART通讯口、2个IIC端口、2个SPI端口、1个CAN接口、一个USB 全速接口、有80个快速I/O端口等多种资源,时钟频率最高可达72MHz。
科学技术创新2020.28基于四象限的光斑位置探测系统设计龚元霞刘福华许孝敏刘杰(西京学院理学院,陕西西安710123)1位置探测器介绍本文主要研究的是运动光斑的位置探测,现有的运动光斑的探测器有很多种,主要有电荷耦合器件、位置敏感器件以及四象限探测器。
本文选择的四象限探测器,探测系统的核心器件进行研究。
1.1探测器的选择四象限探测器是将四个性能完全相同的光电探测器按照直角坐标系的方式排列,利用光生伏特效应将光信号转换为电信号的器件。
光照射到探测器上,探测器的光敏面会形成四个单独的区域,由于光斑占用每个区域的面积不同,从而换算出光斑占用光敏面四个区域的光电压不同,来解算光斑实际位置。
本文选择的四象限探测器如图1,具体尺寸为30mm (长)X30mm (宽)X15mm (厚),感光口径为10mm ,入光口上带螺纹,内螺纹大小为M12。
图1四象限探测器探测器的下侧有M4的螺丝,长度约为6mm ,用此连接支杆可以固定整个探测器。
末端接头采用的是标准的6针PS2接头,如图2。
图2探测器末端接头选用的四象限探测器主要性能参数:根据本系统所应用到的环境以及硬件的要求,四象限探测器的主要性能参数设计如表1。
表1四象限探测器性能参数1.2四象限探测器工作原理图3探测原理当光照射四象限探测器的光敏面上后,光斑与探测器光敏面的分布如图在探测器平面上的分布如图3所示,因探测器有四个像元,四个像元是独立的,光斑因为离四个像元的远近不同,占用的每个像元的面积也有所不同,这样四个像元因为光电效应产生的电压也有所不同,根据这些电压差别可换算出光斑在探测器上的相对位置。
1.3探测算法的选择根据本文四象限探测器的探测原理,电压与光斑位置的解算关系如下:(1)(2)本文选择比较简单的加减定位算法对光斑位置进行计算摘要:随着各种探测技术的蓬勃发展,光斑位置探测在工业精密检测以及导弹制导等领域受到极大的欢迎。
通过比较多种探测器的性能及特点,将选择一种象限探测器作为本文光斑探测系统的核心探测器件。
四象限位置测量系统设计实验
光电系统设计报告
设计题目:四象限位置测量
系统设计实验专业班级:
学生姓名:
学生学号:
指导教师:
设计时间: 2017/12/29
1、设计题方案论证;
实验采用激光器作为光源,四象限探测器作为光电探测接收器,根据电子
和差式原理,实现可以直观、快速观测定位跟踪目标方位的光电定向装置,是
目前应用最广泛的一种光电定向方式。
光发射电路主要由光源驱动器、光源(主要是半导体光源,包括LED、LD
等)、光功率自动控制电路(APC)等部分组成。
用NE555组成的脉冲发生电路
来驱动650nm的激光器。
四象限位置测量器是以光导模式工作的光伏探测器件。
它利用集成电路光
刻技术将一个探测器件光敏面窗口分割成4个面积相等、形状相同、位置对称
的区域而形成,4个探测区域具有基本相同的性能参数。
作为一种常用的位置敏
感器件,当入射光点落在器件感光面的不同位置时,四象限探测器输出不同的电
信号,通过对此电信号进行处理,可以确定入射光点在感光面上的位置。
四象限
光电探测器广泛应用于激光准直、测角、自动跟踪等精密光电检测系统中,通过
对光斑中心位置的精确定位来检测位移或偏角的大小。
它利用半导体材料吸收光子能量引起的电子跃迁,将光信号转换为电信号。
通常是利用集成光路光刻技术将完整的PN结光电二极管的光敏面分割成几个
具有相同形状和面积、位置对称的区域,每个区域可以看作1个独立的光电探
测器,其背面仍为一整片。
理想情况下每个区域都具有完全相同的性能参量。
影响四象限光电检测系统工作精度的因素主要包括外围大气环境、目标光
斑大小和光斑能量分布以及系统本身采用的算法、器件响应差异和噪声所带来
的四象限不均匀性。
2、各单元电路设计与分电路图绘制并分析工作原理;
1、STM32F103RBT6:
STM32F103RBT6/STM32F103是ST 公司基于ARM最新Cortex-M3架构内核的32位处理器产品,内置128KB的Flash、20K的RAM、12位AD、4个16位定时器、3路USART通讯口、2个IIC端口、2个SPI端口、1个CAN接口、一个USB全速接口、有80个快速I/O端口等多种资源,时钟频率最高可达72MHz。
STM32F103RBT6封装:LQFP64
2、四象限位置探测器:
主要参数:芯片型号:SO66A;
芯片尺寸:6*6mm;
光谱相应范围:400-1100nm;
峰值波长:940nm;
暗电流:1nA;
3、CX1117-3.3:
CX1117-3.3是一个正向低压降稳压器,输入电压范围:4.75-12V,固定输出3.3V。
典型应用电路如下:
4、液晶LCD12864:
1)显示原理:
本实验采用的LCD12864液晶,水平方向(X方向)具有128列像素,从左往右依次是第0列......第127列,竖直方向(Y方向)具有64行像素,每8行组成1页,从上往下依次是第0页......第7页,这样以页号和列号为坐标,就可以指定8个像素。
2)参数说明:
逻辑或电源电压:2.8V-5.0V
蓝色背光:背光电压3V
串行接口:一根数据线,一根时钟线
不带字库:需要自己编辑外部字模数组
3)管脚说明:(下面的序号和液晶上面的数字是对应的)
1、背光LEDA,蓝色背光最低2.8V,标准3V,最高3.3V
2、地VSS
3、电源正VDD:最低2.8V,标准3V,最高5.5V
4、串行数据SI :在SCL上升沿加载后至少还要保持10nS稳定;
5、串行时钟SCL
6、命令数据选择段A0
7、复位RST:启动时至少维持1uS低电平以使液晶内部复位,然后维持高电平,在经过1uS完成复位以后才能对液晶进行操作。
8、片选CS:它为低电平时才能进行操作,加载数据后至少维持40nS低电平;
3、总电路图绘制及工作过程说明,实验结果与分析;
1、将四象限装置通过支杆和滑块固定在导轨上,如图所示;
2、将激光器通过支杆固定在二维底座上,再将二维底座固定在导轨上,如图10.3所示;调节位置使激光器和四象限相对安放,且在同一水平直线上,如图10.4所示;
3、取出MXY9001-四象限系统组件板,将LCD12864液晶固定在四象限系统组件板上;
4、按照原理图搭建电路,如图所示:
5、按照实验原理图检查电路,在确保没有接线错误的前提下,接通实训平台电源,用J-LINK下载可执行文件“四象限.hex”。
6、调节激光器高度,使光斑打在第一、二象限所在的水平线上:
1)调整激光器二维底座的螺旋测微头,使光斑打在四象限的第一象限,观察液晶屏上光斑所在的位置及显示的当前坐标;
2)调整激光器二维底座的螺旋测微头,使光斑打在四象限的第二象限,观察液晶屏上光斑所在的位置及显示的当前坐标;
7、调整四象限的高度,使光斑打在第三、四象限所在的水平线上:
1)调整激光器二维底座的螺旋测微头,使光斑打在四象限的第三象限,观察液晶屏上光斑所在的位置及显示的当前坐标;
2)调整激光器二维底座的螺旋测微头,使光斑打在四象限的第四象限,观察液晶屏上光斑所在的位置及显示的当前坐标,如图所示。
4、安装、调试过程、故障问题分析及解决;
在操作的时候,老师要我们认真翻阅实验手册,了解此次实验的各个内容,实验器材,电路连接,注意事项以及操作步骤。
接电源和接地的相关部分要确保无误才能接通电源,为了避免仪器损坏这种情况,可以连电源用红线,连地用黑线。
我们初步查看了实验手册后,拿出实验所需的元件,我们迅速的把线路连起来了。
然后再通电源。
问题出现了,点状半导体激光器没有发出激光。
浴室我们请教老师,原来我们拿的不是激光。
然后老师给我们拿了正确的激光器,然后我们完成了本次实验。
电路连线实物图
5、心得体会。
经过这次的光电课程设计,我个人得到了不少的收获,一方面加深了我对课本理论的认识,另一方面也提高了实验,操作能力。
现在我总结了以下的体会和经验。
我觉得实验是很宝贵,很难得的一次机会。
实验的过程全是我们学生自己动手来完成的,这样,我们就必须要弄懂实验的原理。
在这里我深深体会到理论和实践结合的作用:弄懂实验原理,而且体会到了实验的操作能力是靠自己亲自动手,亲自开动脑筋,亲自去请教别人才能得到提高的。
在实验过程中,我们应该尽量减少操作的盲目性,提高实验效率的保证,有的人一开始就赶着做,结果却越做越忙,主要就是这个原因。
我也曾经犯过这样的错误,刚开始没有认真吃透电路图,瞎着接线,结果看不到结果,所以要稳扎稳打,一步一步的来。
最后,通过这次的测试技术实验我不但对理论知识有了更加深的理解,对于实际的操作和也有了质的飞跃。
经过这次的实验,我们整体对各个方面都得到了不少的提高。