汽车安全辅助系统课题
- 格式:ppt
- 大小:2.56 MB
- 文档页数:16
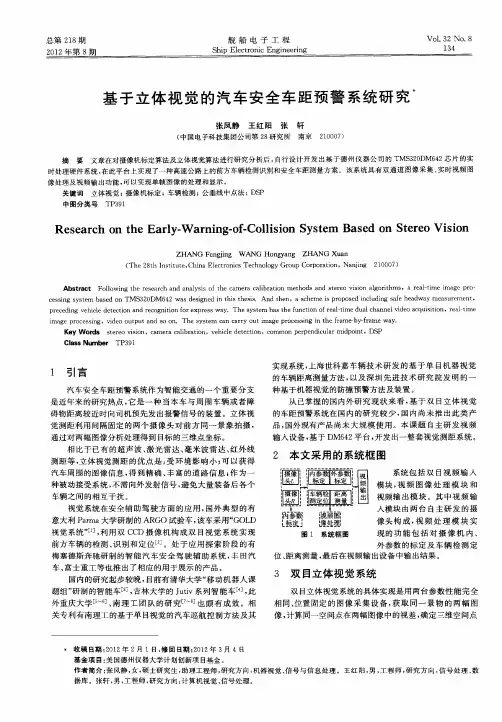
倒车雷达概述1引言自从1886年2月9日卡尔•本茨发明了人类第一辆汽车,至今世界汽车工业经过了近122年的发展,当代汽车已经非常成熟和普遍了。
汽车已经渗透于国防建设、国民经济以及人类生活的各个领域之中,成为人类生存必不可少的、最主要的交通工具,为人类生存和社会的发展与进步起到了至关重要的作用。
当今,汽车已经成为人们生活中不可缺少的一部分,它给人们带来方便快捷的同时,也出现了许多问题。
如越来越多的汽车使道路上有效的使用空间越来越小,新手也越来越多,由此引起的剐蹭事件也越来越多,由此引起的纠纷也在不断地增加。
原来不是问题的倒车也逐渐变成了问题。
尽管每辆车都有后视镜,但不可避免地都存在一个后视盲区,倒车雷达则可以在一定程度上帮助驾驶员扫除视角死角和视线模糊的缺陷,提高驾驶的安全性,减少剐蹭事件。
因此,提出了基于超声波测距的汽车用倒车雷达的设计。
2倒车雷达的发展倒车雷达(Car Reversing System)全称“倒车防撞雷达”,又称“泊车辅助装置”,它是汽车泊车或者倒车时的安全辅助装置。
它能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除驾驶员泊车、倒车和启动车辆时因前后左右探视所引起的困扰,并帮助驾驶员克服视角死角和视线模糊的缺陷,提高驾驶的安全性。
经过几年的发展,倒车雷达系统已经过了数代的技术改良,不管从结构外观上,还是从性能价格上,这几代产品都各有特点,目前使用较多的是数码显示、荧屏显示和魔幻镜倒车雷达这3种。
倒车雷达真正开始于轰鸣器,也就是第一代倒车雷达。
我想很多人都不会忘记“倒车请注意!”这句话,因为现在多数普通车还在使用它。
第二代则是采用数码波段显示,可显示后障碍物离车体距离的数码波段显示倒车雷达。
第三代的液晶荧屏显示较以前有了一个质的飞跃。
紧接着的四代魔幻镜倒车雷达和五代整合影音系统更是结合了前几代产品的优点,在原有倒车雷达的基础上增加了很多功能。
3主要技术介绍距离是在不同的场合和控制中需要检测的一个参数。
汽车制动系统的设计-开题报告毕业设计(论文)开题报告学生姓名:XXX指导教师姓名:XXX系部:汽车工程系专业:车辆工程专业、班级:XXX车辆工程是否外聘:□是□否职称:副教授题目名称:汽车制动系统的设计一、课题研究现状、选题目的和意义随着高速公路路网的不断发展,汽车车速的提高以及车流密度的增大,对汽车制动系统的工作可靠性要求日益提高。
只有制动效能好、制动系统工作可靠的汽车才能充分发挥出高速行驶的动力性能并保证行驶的安全性。
目前,汽车制动系统种类很多,形式多样,主要包括机械式、气动式、液压式和气—液混合式。
这些制动系统结构型式虽然不同,但基本工作原理相同,都是利用制动装置,用工作时产生的摩擦热来逐渐消耗车辆所具有的动能,以达到车辆制动减速或停车的目的。
随着节能和清洁能源汽车的研究开发,汽车动力系统发生了很大的改变,出现了很多新的结构型式和功能形式。
新型动力系统的出现也要求制动系统结构型式和功能形式发生相应的改变。
因此,本文选取汽车制动系统的设计作为毕业设计主题,旨在研究汽车制动系统的结构、工作原理和设计方法,为汽车制动系统的发展提供参考和指导。
本文的研究意义在于提高汽车制动系统的效能和可靠性,保证汽车行驶的安全性,促进汽车制造业的发展。
目前,汽车制动系统主要由能装置、控制装置、传动装置和制动器组成。
其中,供能装置包括供给、调节制动所需能量以及各个部件,产生制动能量的部分称为制动能源;控制装置包括产生制动动作和控制制动效果的部件;传动装置包括把制动能量传递到制动器的各个部件;制动器是产生阻碍车辆运动或者运动趋势的力的部件,也包括辅助制动系统中的部件。
现代的制动系统还包括制动力调节装置和报警装置、压力保护装置等辅助装置。
综上所述,本文将研究汽车制动系统的结构、工作原理和设计方法,以提高汽车制动系统的效能和可靠性,促进汽车制造业的发展。
供能装置包括人力制动、伺服制动、动力制动或两种的结合使用。
人力制动有机械式和液压式两种形式,机械式主要用于驻车制动系统,而液压式则是通过制动踏板推动制动主缸,使制动器进入工作状态。
江苏大学毕业设计(论文)选题报告课题名称专用汽车制动性能研究学生姓名汪凯狄专业班级车辆工程0905 课题来源自选指导教师朱茂桃2013年3月1 选题的依据及意义汽车制动系统是车辆行驶安全的关键装置。
近年来,随着人类安全意识的提高,行车安全已是汽车发展的一个主要趋势之一。
为了保证行车安全,如今汽车制动系的作用愈显重要,也只有制动性能良好,制动工作可靠的汽车,才能充分发挥其动力性能。
近年来随着汽车车速不断的提高,汽车行使的动能增加,制动时产生的热量越大,都位于车轮内,通风散热条件差,长时间的高速行使,热量散布出去,致使摩擦产生热衰退、摩擦系数下降、制动力减弱,保证不了安全行使的制动效能,严重影响行车安全性。
据有关部门数据显示,2009年,中国汽车保有量约占世界汽车保有量的百分之三,但交通事故死亡人数却占世界的百分之十六。
从二十世纪八十年代末中国交通事故年死亡人数首次超过五万人至今,中国(未包括港澳台地区)每年交通事故50万起,因交通事故死亡人数均超过10万人,已经连续十余年居世界第一。
而在由于车辆本身的问题而造成的交通事故中,制动系统故障引起的事故为总数的45%,另外,由于载重汽车的“大吨小标”的普遍现象及制动器产品质量的参差不齐,无疑对制动器的安全性能留下了隐患。
可见,提高制动系统的制动质量将有助于减少事故的发生,将大幅度地提高汽车的安全性。
2 国内外研究现状及发展趋势近年来,随着车辆技术的进步和汽车行驶速度的提高,制动系统越来越重要。
众多的汽车工程师在改进汽车制动性能的研究中不断努力。
目前关于汽车制动控制的研究包括制动控制的理论和方法,以及采用新的技术等。
汽车制动时让它停下来的力是地面制动力,它来源于制动器制动力,但受制于地面最大附着力。
如果地面制动力超过最大附着力,汽车将发生抱死现象,且这时地面附着系数较小,汽车将滑行很长距离才停止,即制动距离过长。
为解决这一问题,现在汽车上普遍装有ABS,它将滑移率控制在15%-30%之间,防止汽车抱死,并且附着系数最大,制动距离缩短。
毕业设计开题报告电气工程及其自动化汽车倒车防撞报警系统硬件设计1选题的背景、意义随着汽车保有量的迅速增加以及城市市区的密集化, 目前公路上、停车场上的汽车越来越多, 交通也越来越拥挤。
由于空间的有限性, 汽车在公路上行驶或者出入停车场时, 其倒车、转弯的机率大大增加, 而驾驶员的视线由于受到限制, 尾撞和刮擦事故时有发生。
因此, 具有自动报警功能的汽车倒车防撞系统对汽车的安全行驶具有重要意义。
而且随着国民经济的高速发展,我国汽车的拥有量在大幅增加,造成道路拥堵,交通事故频发,给人们的生命和财产安全带来了巨大的损失。
安全驾驶已经成为大家关注的焦点,其中汽车防撞系统的设计和需求显得非常重要和迫切。
针对这种情况,设计一种响应快、可靠性高且较为经济的汽车倒车防撞报警系统势在必行。
在汽车倒车时, 汽车倒车防撞报警系统会不断显示汽车尾部与障碍物之间的距离, 当达到预先设置的阈值范围内时, 防撞报警系统就会发出不同的报警声信号, 以提醒驾驶员及时正确地处理情况, 避免碰撞, 提高其安全性。
2相关研究的最新成果及动态倒车雷达的快速发展始于20世纪末21世纪初,经过几年的时间,随着技术发展和用户需求的变化,倒车雷达在几年的时间里大致经过了六代的演变。
第一代:倒车时通过喇叭提醒。
“倒车请注意”!想必不少人还记得这种声音,这就是倒车雷达的第一代产品,只要司机挂上倒档,它就会响起,提醒周围的人注意,不能算真正的倒车雷达,基本属于淘汰产品。
第二代:采用蜂鸣器不同声音提示驾驶员。
这是倒车雷达系统的真正开始。
倒车时,如果车后1.8m~1.5m处有障碍物,蜂鸣器就会开始工作。
蜂鸣声越急,表示车辆离障碍物越近。
但没有语音提示,也没有距离显示,虽然司机知道有障碍物,但不能确定障碍物离车有多远,对驾驶员帮助不大。
第三代:数码波段显示具体距离或者距离范围。
这代产品比第二代进步很多,可以显示车后障碍物离车体的距离。
如果是物体,在1.8m开始显示;如果是人,在0.9m左右的距离开始显示。
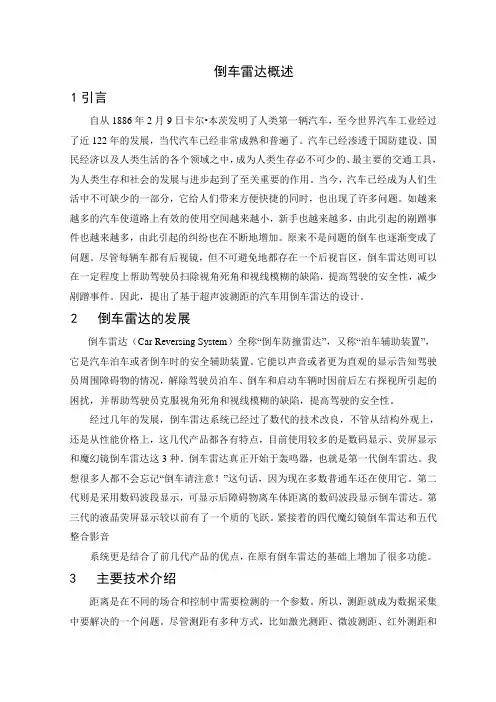
倒车雷达毕业设计【篇一:基于单片机得倒车雷达设计毕业论文】1 绪论1.1 课题背景随着我国经济的飞速发展,交通运输车辆的不断增多,由此产生的交通问题越来越成为人们关注的问题。
其中倒车事故由于发生的频率极高,已引起了社会和交通部门的高度重视。
倒车事故发生的原因是多方面的,倒车镜有死角,驾车者目测距离有误差,视线模糊等原因造成倒车时的事故率远大于汽车前进时的事故率,尤其是非职业驾驶员以及女性更为突出。
而倒车事故给车主带来的许多麻烦,有鉴于此,汽车高科技产品家族中,专为汽车倒车泊位设置的“倒车雷达”应运而生,倒车雷达的加装可以解决驾驶人员后顾之忧,大大降低倒车事故的发生。
超声波倒车雷达全称叫“倒车防撞雷达”,也叫“泊车辅助装置”,是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车和启动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除视野的死角和视线模糊的缺陷,提高驾驶的安全性。
倒车雷达的原理与普通雷达一样,是根据蝙蝠在黑夜里高速飞行而不会与任何障碍物相撞的原理设计开发的。
通过感应装置发生超声波,然后通过反射回来的超声波判断前方是否有障碍物,以及障碍物的距离、大小、方向、形状等。
只不过由于倒车雷达体积大小及实用性的限制,目前其主要功能仅为判断障碍物与车的距离,并做出提示。
1.2 国内外研究现状一般认为,关于超声波的研究最初起始于1876年f.galton的气哨实验,这是人类首次有效产生的高频声波。
在之后的三十年中,超声波仍然是一个鲜为人知的东西,由于当时电子技术发展缓慢,对超声波的研究造成了一定程度的影响。
在第一次世界大战中,对超声波的研究逐渐受到重视。
法国人langevin使用一种晶体传感器在水下发射和接收相对低频的超声波。
他提出的这种方法可以用来检测水中是否存在潜艇并进行水下通信。
1929年,sokolov首先提出用超声波探查金属物内部缺陷的建议。
相隔2年,1931年mulhauser获准一项关于超声检测方法的德国专利,不过他并未做更多的工作。
专科新能源汽车技术毕业设计课题实物【实用版】目录1.新能源汽车技术专科毕业设计课题实物概述2.新能源汽车技术的发展现状与趋势3.毕业设计课题实物的选题背景与意义4.毕业设计课题实物的具体内容与实现5.毕业设计课题实物的创新点与挑战6.总结与展望正文一、新能源汽车技术专科毕业设计课题实物概述随着全球能源危机和环境污染问题日益严重,新能源汽车技术作为替代传统燃油车的重要选择,得到了各国政府和企业的高度重视。
我国政府也在大力推广新能源汽车,并制定了一系列政策鼓励其发展。
在这样的背景下,新能源汽车技术成为了专科毕业设计的热门课题。
本文将介绍一个新能源汽车技术专科毕业设计课题实物,以期为相关领域的研究提供参考。
二、新能源汽车技术的发展现状与趋势1.发展现状近年来,新能源汽车技术取得了长足的发展,其中包括电动汽车、混合动力汽车、燃料电池汽车等。
这些新能源汽车在能源消耗、环境污染、驾驶性能等方面具有明显优势。
在全球范围内,各国政府和企业都在积极投入新能源汽车的研发和生产,以应对日益严重的能源和环境问题。
2.发展趋势从目前的发展趋势来看,新能源汽车技术将在未来继续保持高速发展。
首先,各国政府对新能源汽车的政策扶持力度不断加大,为新能源汽车市场创造了良好的发展环境。
其次,新能源汽车的技术创新不断取得突破,如电池续航里程、充电速度、整车性能等方面的提升,使得新能源汽车的竞争力逐渐增强。
最后,随着消费者对新能源汽车的接受度越来越高,市场需求也在持续上升。
三、毕业设计课题实物的选题背景与意义1.选题背景在新能源汽车技术快速发展的背景下,如何设计一款具有竞争力的新能源汽车成为了本毕业设计课题的出发点。
为了实现这一目标,本课题选取了某一具体车型作为研究对象,通过分析市场需求、技术发展趋势等因素,确定研究方向和内容。
2.选题意义本课题的研究具有重要的实际意义。
首先,通过对具体车型的设计,有助于提高学生的实际操作能力,培养其解决实际问题的能力。
双小齿轮助力式:曲线型助力特性能获得较好的转向手感和中间位置感。
回正控制在低速情况下起回正作用,提供一在高速情况下,阻尼控制起防止方向盘摇头。
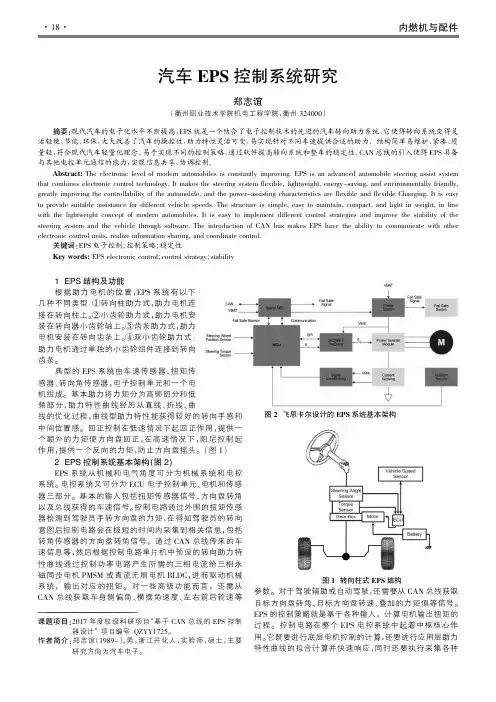
(图1)系统从机械和电气角度可分为机械系统和电控电子控制单元、电机和传感器三部分。
基本的输入包括扭矩传感器信号、方向盘转角控制电路通过外围的扭矩传感在得知驾驶员的转向意图后控制电路会在极短的时间内采集到相关信息,包括总线传来的车然后根据控制电路单片机中预设的转向助力特性曲线通过控制功率电路产生所需的三相电流给三相永进而驱动机械系统,输出对应的扭矩。
对一些高级功能而言,还需从左右前后轮速等参数。
对于驾驶辅助或自动驾驶,还需要从CAN 总线获取目标方向盘转角、目标方向盘转速、叠加的力矩值等信号。
的控制策略就是基于各种输入,计算电机输出扭矩的过程。
控制电路在整个EPS 电控系统中起着中枢核心作它既要进行底层电机控制的计算,还要进行应用层助力特性曲线的拟合计算并快速响应,同时还要执行采集各种图1转向柱式EPS 结构图2飞思卡尔设计的EPS 系统基本架构输入信息监控整个电控系统等任务。
因而EPS系统对控制电路的计算精度和速度及可靠性提出了很高的要求。
即使控制电路有故障发生的情况下也要检测到并输出关断信号到功率电路的相切断单元,以保证功能安全目标的实现。
(图3)3EPS控制系统设计开发电动助力转向系统为系统集成商提供了具有挑战性的控制设计问题。
由于系统直接与驾驶员手互动,因此必控制器和驾驶员的神经肌肉骨骼模型。
路径跟随控制器分为补偿控制和预览控制。
转向感觉和舒适度测量值。
一些驾驶员抱怨转向松动或沉重,以及方向盘产生不愉快的振动,对偏心的中枢转向感的偏爱。
设计系统需要在存在干扰和不确定的情况下解决跟踪控制问题。
仿真软件开发驾驶员和车辆模型,基于模型的的驱动程序提供适当的帮助。
的优化程序对特性曲线进行调整,具有不同体力的驾驶员提供适当帮助,以具有相似的道路和转向感觉。
然后基于调整后的于观测器的最佳干扰抑制控制器,该控制器由线性二次调节器和加有整形滤波器的卡尔曼滤波器观测器组成,可在衰减的同时提供辅助功能。
毕业设计(论文)题目视觉导引智能寻迹小车系统设计如需要源代码或者其他资料可以联系我(1163776101@ OR m201570436@)姓名学号所在学院机械工程学院专业班级指导教师日期年月日智能车作为现代社会的新产物,以及它的安全、节能、环保、智能化和信息化越来越受到人们的关注,在智能车的基础上开发出来的产品已经成为自动化物流运输、柔性生产组织等系统的关键设备。
本设计是一种基于单片机控制的简易智能寻迹小车系统,对智能车自主行驶的决策以及算法也进行了相应的研究。
本论文主要从总体方案设计、硬件和软件设计。
硬件方面以Cortex-m3为控制核心,使用STM32F103RBT6单片机,辅助模块包括电源模块、驱动模块,图像采集模块以及为了调试方便而采用的辅助调试模块。
软件设计方面重点介绍了寻迹小车如何解决轨道检测和线路跟随问题。
单片机将CMOS摄像头对路面黑色轨迹进行检测的信号,通过一定的算法分析,通过调整PWM占空比控制小车左右两轮的速度以实现转向,从而使小车能够沿着黑色轨迹自动行驶,到达自动寻迹的目的。
关键字:智能车,图像处理,STM32As the new product of modern society, intelligent vehicle, and its safety, energy saving, environmental protection, intelligence and information technology, is paid more and more attention,The product has become the key equipment of the automation logistics transportation, the flexible production organization and so on. This design is a simple intelligent tracing car system based on microcontroller control, and the autonomous driving decision and algorithm of the intelligent vehicle are also studied.This paper mainly from the overall scheme design ,hardware and software design. Hardware to Cortex-M3 as the control core, use stm32F103RBT6 microcontroller, auxiliary module including power supply module, a driving module, image acquisition module and to facilitate the debugging and the auxiliary debug modul . The design of the software focuses on how to solve the track detection and line following problem. SCM CMOS camera on the road to detect the black trajectory of the signal, through a certain algorithm analysis.By adjusting the duty ratio of PWM to control the speed of the car around two wheels to achieve the steering, so that the car can automatically travel along the black track, reaching the purpose of automatic tracing.Keywords: smart car, image processing, stm32目录1 绪论......................................... 错误!未定义书签。
aeb vru 术语全文共四篇示例,供读者参考第一篇示例:近年来,随着技术的不断发展,智能汽车行业也日渐兴起。
在智能汽车的研发过程中,AEB和VRU成为了一个重要的研究领域。
AEB 是Automatic Emergency Braking的缩写,中文译为自动紧急制动系统,而VRU则指可变道路用户,即行人、自行车手和摩托车手等。
AEB系统是一种能够监测车辆前方可能发生碰撞的系统,一旦发现碰撞危险,系统会自动进行制动或加速以避免碰撞发生。
这种系统采用了车载传感器,如雷达、激光器和摄像头等,以识别前方障碍物,并在必要时发出警告并进行紧急制动。
AEB系统可以大大减少交通事故的发生和减轻交通事故的后果,提高了驾驶安全性。
而VRU则是一种针对可变道路用户的智能辅助系统。
在城市道路中,行人、自行车手和摩托车手等可变道路用户是一种常见的交通参与者,但由于其行驶速度较慢且对交通情况的感知能力有限,易受到交通事故的威胁。
针对这些可变道路用户的VRU系统的研发也成为了重要的课题。
VRU系统同样使用了车载传感器,如激光雷达、摄像头和红外线传感器等,以实时监测周围可变道路用户的位置和动态信息。
VRU系统还会对交通情况和道路环境进行分析和预测,以提前警示驾驶员可能发生的碰撞危险,并采取措施避免事故的发生。
通过提高驾驶员对可变道路用户的感知能力和响应速度,VRU系统有效地减少了与可变道路用户相关的交通事故,保障了道路交通的安全和畅通。
AEB和VRU系统作为智能汽车领域的重要技术,为提高驾驶安全性和降低交通事故风险发挥着重要作用。
随着技术的不断进步和智能汽车的不断普及,相信AEB和VRU系统的研发应用会为道路交通安全和智能出行带来更多的便利和保障。
希望未来能够有更多的科技创新和智能系统的推广,使我们的出行更加安全、便捷和舒适。
第二篇示例:AEB(Automatic Emergency Braking)是一种主动安全技术,旨在帮助驾驶员避免碰撞或减少碰撞造成的危害。