考虑起算数据误差的测边交会精度估算公式_李全信
- 格式:pdf
- 大小:451.22 KB
- 文档页数:3

边角后方交会计算方法及精度分析赵振伟【摘要】文章论述了野外测量中边角后方交会的一种方法,并进行了精度评定和实际应用举例.该方法简捷易行,克服了已知点不通视给测量工作带来的麻烦,在实际工作中具有较好的应用价值.【期刊名称】《辽宁科技学院学报》【年(卷),期】2010(012)001【总页数】2页(P16-17)【关键词】边角后方交会;点位误差分析【作者】赵振伟【作者单位】本溪市规划设计研究院,辽宁,本溪,117022【正文语种】中文【中图分类】TU198.6在测量工作中,利用交会点的方法来求未知点的坐标和高程,早已被广泛采用。
传统的方法有:极坐标法、测角交会法、测边交会法、边角交会法、后方交会法等。
这些方法大多要先在已知点上设站,后视另一已知点,然后在未知点上立镜测边或测角,交会出未知点。
由于城市导线点破坏比较严重,往往出现两已知点不通视的情况,此时再用上述交会法就无法进行测量工作。
随着全站仪的发展和普及,现介绍一种利用全站仪在未知点上设站,观测两个相互通视或不通视的两已知点间夹角及到其中一已知点的边长,计算未知点坐标和高程的边角后方交会方法,供同行探讨。
1 外业观测方法野外测量中,我们经常会遇到下面这种情况,在已知导线点设站,由于某种原因看不到后视方向而无法进行工作。
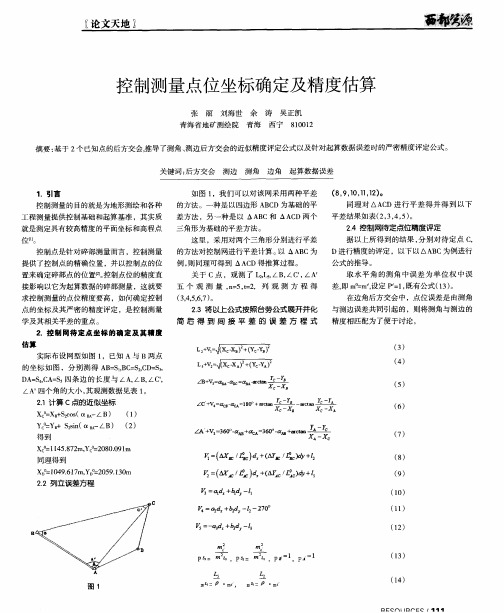
实际工作中,我们在现场选择一个既能看到一较近已知点,又能看到一个或两个较远已知三角点的位置作为未知点 P,正倒镜观测A、B两已知点间夹角γ和 PA的水平距离 S,取其平均值作为观测结果,应用相关公式即可求出 P点坐标;应用正倒镜所测高差中数计算出 P点高程。
考虑到该方法缺少多余观测,无法发现粗差,可在观测γ角的同时,正倒镜测出 C、A两已知点间夹角γ′,待 P 点真坐标求出后作为检核。
如图 1所示。
图1由于这种交会是在未知点上进行的,且仅观测了一条边和一个角,故可称为边角后方交会。
下面来讨论这种交会的计算方法和精度。
2 计算方法由图 1可见,AP的水平边长已知为 S,再求得 AP的方位角αAP,可得AP边的坐标增量ΔXAP、ΔYAP,于是 P点坐标可求。
测边后方交会的直接计算方法作者:李行洋李珩来源:《价值工程》2014年第23期摘要:在图根控制测量中,交会定点是一种常用、简单的加密平面控制点的方法,有必要探讨在待定点上观测三条边长情况下的交会定点的直接计算问题。
Abstract: In topographic control survey, the intersection point is a common and simple encryption method of horizontal control point. It is necessary to explore the direct calculation problem of intersection of three sides in the case of fixed point observation.关键词:边长测量;后方交会;计算Key words: linear measurement;resection;calculation中图分类号:G64文献标识码:A文章编号:1006-4311(2014)23-0287-020引言在图根控制测量中,交会定点是一种常用、简单的加密平面控制点的方法。
目前,随着全站仪的广泛使用,除了可以采用传统的测角交会方法外,测边交会加密平面控制点方法的运用越来越普遍。
但现在关于测边交会定点的计算主要是采用间接计算公式,公式推导不仅复杂,而且计算不易掌握。
考虑到边长测量特点,可以推导出测边交会的直接计算公式。
1计算方法如图,A(xA,yA)、B(xB,yB)、C(xC,yC),为三个已知坐标的控制点,P(xP,yP)为选定的待定控制点。
现在P点设置仪器,分别照准A、B、C三点,观测三条边长DPA、DPB、DPC,则有:D=(x-x)+(y-y)(1)D=(x-x)+(y-y)(2)D=(x-x)+(y-y)(3)分别展开三式,并作化简,有(-2xA+2xB)xP+(-2yA+2yB)yP=-x+x-y+y+D-D(4)(-2xA+2xC)xP+(-2yA+2yC)yP=-x+x-y+y+D-D(5)(-2xB+2xC)xP+(-2yB+2yC)yP=-x+x-y+y+D-D(6)显然,由上述三式中的任意两式均可求出P(xP,yP)。

三坐标精度计算公式
1.首先,需要收集测量数据,包括取样点的坐标数据和对应的真实值
或理论值。
取样点可以是零件的各个特征点。
2.然后,需要计算每个取样点的测量误差。
测量误差是测量值与真实
值之间的差异,可以通过测量值减去真实值得到。
3.接下来,需要计算每个取样点的平均误差。
平均误差是每个取样点
的测量误差的平均值,可以通过将所有测量误差相加并除以测量点数量得到。
4.然后,需要计算每个取样点的标准偏差。
标准偏差是测量误差的平
均偏离度,可以通过将每个测量误差减去平均误差的平方相加并除以测量
点数量再开平方得到。
5.最后,可以使用标准偏差来表示测量结果的精度。
标准偏差越小,
表示测量结果的精度越高。
标准偏差也可以转换为百分比形式,表示精度
的相对大小。
-测量误差:E=Xm-Xt
其中,E是测量误差,Xm是测量值,Xt是真实值或理论值。
-平均误差:Em=ΣE/n
其中,Em是平均误差,ΣE是所有测量误差的总和,n是测量点数量。
-标准偏差:σ=√(Σ(E-Em)²/n)
其中,σ是标准偏差,Σ(E-Em)²是所有测量误差与平均误差之差的
平方之和,n是测量点数量。
-精度百分比:P=(σ/Xt)*100%
其中,P是精度百分比,σ是标准偏差,Xt是真实值或理论值。
通过以上公式,可以计算出三坐标测量的精度,从而评估测量结果的可靠性和准确性。

后方交会在施工测量中的应用摘要:测绘仪器经过长期的发展,其功能多样化、专业化充分显现,同时精度更加可靠。
测绘仪器的发展为工程测量提供了多种方法,尤其是全站仪的普遍运用使测量工作的开展更加便捷高效。
在施工放样过程中,由于后方交会的测量方法具有控制点布设灵活、施测方便快捷、控制点之间无需通视等优点,常被采用。
关键词:施工放样、后方交会、全站仪、精度一、引言玉溪矿业有限公司大红山铜矿位于新平县戛洒镇境内,其地理位置为东经101°39′,北纬24°06′,地表海拔高度为600-1850米,相对高差为1250米。
矿区属侵蚀剥蚀山地地形,地势险峻,河谷发育交错。
矿区地下工程错综复杂,井巷内通风条件、温湿度、空气能见度都相对地表有明显差异。
综合考虑客观限制条件以及安全因素,要求井下测量作业在满足精度的前提下,快速完成作业。
由于井巷工程顶板垮落、巷道喷浆支护、密闭墙施工、采空区、爆破作业等原因,使得布设在巷道顶板上的控制点掉落,造成控制点之间无法通视或者巷道内长距离没有控制点的状况。
当新建工程远离现有控制点且新建工程零星分布时,特别是采矿区域处于逐渐收缩的情况下时,为满足类似新建工程的施工放样测量,重新布设控制导线,进行测量平差,会增加生产成本以及安全风险。
如何根据实际情况选择恰当的测量方法进行工程放样,并完成后期测图工作,成为局限条件下应当思考的问题。
局限条件下,后方交会为高效开展井下测量作业提供了一种技术手段。
二、两点后方交会方法的比选根据后方交会过程中观测值的不同,可将后方交会方法分为测边后方交会、测角后方交会以及边角同测后方交会。
选择角度后方交会时,我们需要在已知点上观测夹角。
而根据实际情况出发,井下巷道内布设导线或临时控制点,较为可行的方法是在巷道侧帮及顶板上布设控制点。
这时,测角交会的方法没有现实可行性,不考虑。
如图1所示,某次测量作业中,在巷道侧帮布设三个临时控制点A (6993.327,2015.638,446.008)、B(6993.428,2017.308,445.987)、C (6986.975,2016.509,445.963),自由设站P点。

数字测图原理与方法一、名词解释1、大地水准面:把一个假象的、与静止的平均海水面重合并向陆地延伸且包围整个地球的特定重力等位面称为大地水准面。
2、视准轴:物镜光心与十字丝交点的连线称为视准轴。
3、系统误差:在相同的观测条件下,对某一量进行一系列的观测,如果出现的误差在符号和数值大小都相同,或按一定的规律变化,这种误差称为“系统误差”。
4、偶然误差:在相同的观测条件下,对某一量进行一系列的观测,如果误差出现的符号和数值大小都不相同,从表面上看没有任何规律性,这种误差称为“偶然误差”。
5、方位角:由直线一端的基本方向起,顺时针方向至该直线的水平角度称为该直线的方位角。
方位角的取值范围是0°~360°。
6、危险圆:待定点P 不能位于由已知点A 、B 、C 所决定的外接圆的圆周上,否则P 点将不能唯一确定,故称此外接圆为后方交会的危险圆。
7、全站仪:全站仪是全站型电子速测仪的简称,它集电子经纬仪、光电测距仪和微处理器于一体。
8、等高距:地形图上相邻两高程不同的等高线之间的高差,称为等高距。
9、数字测图系统:是以计算机为核心,在硬件和软件的支持下,对地形空间数据进行数据采集、输入、处理、输出及管理的测绘系统,它包括硬件和软件两个部分。
10、数字地面模型(DTM ):是表示地面起伏形态和地表景观的一系列离散点或规则点的坐标数值集合的总称。
11、数字高程模型(DEM ):数字高程模型DEM ,是以数字的形式按一定结构组织在一起,表示实际地形特征空间分布的模型,是定义在x 、y 域离散点(规则或不规则)上以高程表达地面起伏形态的数字集合。
二、简答题1、实际测绘工作中,一般采用的基准面和基准线各是什么?大地水准面和铅垂线是测量外业所依据的基准面和基准线;参考椭球面和法线是测量内业计算的基准面和基准线。
2、角度观测的主要误差来源(种类)有哪些?1)仪器误差:(1)水平度盘偏心差(2)视准轴误差(3)横轴倾斜误差(4)竖轴倾斜误差;2)仪器对中误差;3)目标偏心误差;4)照准误差与读数误差;5)外界条件的影响。
全站仪转点误差计算公式
全站仪的转点误差是指在测量过程中由于仪器自身的误差所引
起的测量偏差。
转点误差通常由仪器的仪器常数误差和水平角误差
组成。
计算转点误差的公式如下:
转点误差 = 仪器常数误差 + 水平角误差。
其中,仪器常数误差是指全站仪在测量时由于仪器本身的制造
和装配误差引起的误差,通常由制造厂家提供。
水平角误差是指在
测量过程中由于水平轴的不垂直或者水平轴的不水平所引起的误差。
为了更准确地计算转点误差,我们可以使用以下公式:
转点误差 = 仪器常数误差+ √(水平轴不垂直误差^2 + 水平
轴不水平误差^2)。
在实际测量中,我们需要对全站仪进行校准,以减小转点误差
的影响。
校准的方法包括水平轴的调整和仪器常数的修正等。
除了上述公式外,还可以根据具体的全站仪型号和测量条件进
行误差计算,因为不同的全站仪可能存在不同的误差来源和修正方法。
在实际测量中,我们还需要考虑环境因素、测量方法等多个因素对误差的影响,以确保测量结果的准确性和可靠性。
总之,全站仪的转点误差计算涉及到仪器常数误差和水平角误差,通过合适的公式和校准方法可以准确计算和修正转点误差,从而提高测量的准确性和可靠性。
文章编号:049420911(2003)0820021202中图分类号:P228.4 文献标识码:BGPS 高程异常拟合精度的估算方法张兴福1,沈云中1,周全基2(1.同济大学,上海200092;2.铁道部第三勘察设计院,天津300251)The Estimate Method of the Accuracy Of GPS H eight Abnormity InterpolationZHAN G Xing 2fu ,SHEN Yun 2zhong ,ZHOU Quan 2ji摘要:利用GPS 大地高和部分水准高程进行高程拟合时,高程异常拟合精度的合理评定在实际工作中很有意义。
给出高程异常拟合精度的估算公式并分析影响高程异常拟合精度的误差来源,利用京沪高速铁路的GPS 实测数据进行验算,取得比较满意的结果。
关键词:GPS 水准;高程异常拟合;精度估算 收稿日期:2002212205作者简介:张兴福(19772),男,山东临沂人,研究生,主要从事物理大地测量、GPS 应用开发方面的研究。
一、引 言GPS 水准代替四等以下水准测量在实际工作中已经得到了广泛应用。
其方法是利用GPS 测得的大地高和水准测得的正常高求得高程异常,由于高程异常变化比较平缓,可以用一些初等函数(如:平面,二次曲面等)进行拟合从而求得未知点的高程异常,进而求得各未知点的正常高,有关这方面的文章已发表很多[1~3]。
但拟合高程异常的精度没有一个评价标准,只凭经验检测最弱点或最弱高差段来进行检核,这种检核方法既不能检核所有拟合点的精度状况,又不能保证检核的确实是最弱点。
为此,本文探讨了GPS 高程异常拟合的精度估算方法,以给出所有拟合点的精度指标,这对高程拟合结果的使用具有重要意义,同时对选择最弱点进行检核具有指导作用。
二、GPS 高程异常拟合的精度估算方法和数学模型 由于GPS 测得的大地高差的精度很高,给定GPS 网的起始大地高就可求出各GPS 点相对起始点精确的大地高。