管道清灰机器人设计
- 格式:doc
- 大小:770.00 KB
- 文档页数:36

浅谈管道清洗机器⼈设计毕业论⽂答辩浅谈管道清洗机器⼈设计论⽂摘要⽕炮在发射后会在⾝管内残留⼤量的物质,这些物质受⾼温、⾼压的与管壁黏贴⾮常牢固极不易清除,会导致⾝管内壁的腐蚀,进⽽影响炮的准确性、可靠性并影响⾝管的使⽤寿命。
这些残留物主要依靠⼈⼯和机械的⽅法清除,设备笨重、智能化程度低,⼠兵劳动强度⼤,效率低,且清不⾼,不能满⾜和适应现代化⾼科技战争的作战要求。
清洗机器⼈,该机器⼈与⽕炮⾝管构成⼀个柔性统,可实现清洗的智能化及管内状况的可视化,不仅极⼤地减轻⼠兵的劳动⽽且可以有效提⾼⽕炮⾝管的维护保养⽔平和寿命,对提⾼部队战⽃⼒具的军事和经济效益,具有⼴阔的应⽤前景。
关键词:管道清洗机器⼈单⽚机⾃动控制AbstractDue to high temperature and pressure, the remaining substances in the bore after the gun is launched will adhere to the bore firmly and can't be removed easily, which will result in erosion of the bore and have an impact on the veracity and reliability of the gun launching as well as its operating life. These substances are removed with manual and mechanical cleaning mainly, which can't meet and accommodate with the campaign need of modernization high-tech wars because of unwieldy equipment, low intelligentization, over laboring intension of soldiers, low efficiency and cleaning extent.Robot and bore achieves in intelligentization of cleaning and visualization of inner bore, which not only greatly lessens laboring tension of soldiers, but advances maintenance level and operating life of bore as well. It is of bright future in expansive application and of great military and economic benefit in enhancing battle effectiveness of the army.Key words:bore cleaning;robot;single chip microcomputer;automation摘要 (I)Abstract......................................................................................................................... II 第⼀章绪论. (1)1.1课题研究背景及关键技术 (1)1.1.1课题的研究背景 (1)1.1.2课题的关键技术 (2)1.2国内外管道机器⼈的研究现状和发展⽅向 (3)1.2.1管道机器⼈的研究现状 (3)1.2.2管道机器⼈的发展⽅向 (5)1.3课题的研究意义 (5)第⼆章炮管擦洗机器⼈总体⽅案设计 (7)2.1需求分析与设计思路 (7)2.2移动功能模块设计 (8)2.2.1运动⽅式分析与选择 (8)2.2.2⾃适应机构设计 (9)2.3擦洗功能模块设计 (11)2.3.1炮膛擦洗过程分析与研究 (11)2.3.2轴向往复式擦洗头设计 (11)2.4控制功能模块设计 (13)2.4.1主控制系统 (13)2.4.2传感器 (13)2.4.3驱动系统 (13)第三章管道清洗机器⼈详细设计 (15)3.1移动功能模块设计与分析 (15)3.1.1传动机构设计 (15)3.1.2连接件设计 (16)3.2擦洗功能模块的设计 (18)3.2.1旋转式清洗头设计 (18)3.3控制系统的设计 (18)3.3.1主控制芯⽚ (19)3.3.2 ATmega128介绍 (20)3.3.3电机控制技术 (21)3.4最⼩系统电路设计 (23)3.4.1时钟/复位模块设计 (23)3.4.2电源模块设计 (23)3.5⼈机接⼝电路设计 (24)3.5.1 LCD显⽰模块 (24)3.5.2键盘电路 (25)3.5.3蜂鸣器电路 (25)3.5.4串⼝通信模块 (26)3.6电机控制电路设计 (26)第四章系统软件设计 (28)4.1系统软件架构 (28)4.1.1 PWM调速程序设计 (28)结论 (31)5.1论⽂总结 (31)5.2⼯作展望 (31)参考⽂献 (32)致谢 (33)附录 (34)第⼀章绪论1.1课题研究背景及关键技术1.1.1课题的研究背景现代国防⼯业⽇新⽉异,武器装备制造及维护的技术⽔平直接决定了国家的军事实⼒。
目录1引言 (3)1.1 论文背景、意义及要求 (3)1.2 国外、国内研究概况 (4)1.3 市场需求预测 (6)1.4 设计的重点与难点 (6)2 机器人行走机构的设计 (7)2.1空调管道系统介绍及清洗原理 (7)2.2 机器人移动载体方案设计 (8)2.2.1 总体方案设计 (8)2.2.2 传动方案的设计 (9)2.3张紧机构的设计 (11)3. 具体设计计算 (12)3.1 移动载体传动计算 (12)3.1.1 左右驱动轮传动计算 (12)3.1.2 后万向轮传动计算 (20)3.2张紧启动系统的设计计算 (24)3.2.1气缸的选择 (24)3.2.2启动辅助元件和回路的选择设计 (26)3.3 传动齿轮﹑蜗轮蜗杆的尺寸计算 (27)3.4 轴的设计﹑计算和校核 (27)3.5 轴承的寿命计算 (32)4 机器人转弯时的管道通过性分析 (33)4.1 管道机器人在水平直角弯管的通过性分析 (33)4.2 管道机器人在矩形管水平圆弧形弯头的通过性分析 (35)5 结构设计 (36)1 引言1.1 论文背景、意义及要求清洁机器人作为服务机器人领域中的一个新产品,尽管目前国内在这方面的研究开发方面已经取得一定的成果, 但是仍有许多关键技术问题需要解决或提高, 行走机构就是其中的一个比较重要的技术。
有的可在房间内随机移动,但要求有一定的动力和对地面有足够大的摩擦。
事实上,虽然有一些公司推出了一些样品或产品,但却不能达到满意程度:清洁效果不佳,遍历时间长。
随着当今社会的发展,空调通风系统在日常生活中发挥着越来越重要的作用。
中央空调系统主宰着楼宇中空气的新陈代谢,被称为“建筑物之肺”。
中央空调管道在长期使用中会积累许多灰尘、病菌及放射物等,这些有害物质在送风过程中便污染了空气,长期被人体吸入,就会危害大众的健康。
因此人们在迫切要求提高生活质量的同时,要求提高工作居住场所及其他公共场所环境质量(特别是空气质量)的呼声也越来越急切。
管道除尘机器人结构设计(机械CAD图纸)题目:管道除尘机器人结构设计摘要基于利用行星磨头清洗技术对管道进行清洗的目的,在总结现有的管道机器人设计方案的基础上,根据现场的实际情况,论文首先对管道清洗机器人行走部分进行方案设计,经分析比较后确定了新型管道清洗机器人行走的较佳设计方案,并据此方案对机器人作了行走部分结构设计;对机器人的行走特性进行了研究,提出了使机器人在管道内能够保持稳定运行的方法.通过对机器人机构的设计和机器人在直管道内运动情况的思考研究,进一步验证了设计思想的可行性。
最后,研究了管道清洗机器人行走系统的安全性能,给出了在高压情况下保证行走系统安全的基本方案,为管道清洗机器人系统的实用化提供可靠的依据。
关键词: 管道机器人;安全防护 ;行走II本科机械毕业设计论文CAD图纸 QQ 401339828AbstractBased on the use of planetary grinding head cleaning technology for the purpose of cleaning pipes, at the conclusion of the existingpipeline robot design based on the actual situation at the scene, the first paper on the pipe cleaning robot to walk part of program design, by analysis and comparison a new pipeline after cleaning robot designed to walk a better program, and accordingly the program made a walk on part of the structure of robot design; characteristics of walking robots have been studied and put forward in the pipeline so that the robot wasable to remain stable The method of operation. By the design of the robot body and the robot movement in the straight tube case study of thinking, and further verify the feasibility of the design idea.Finally, the research pipeline cleaning robot running the safety of the system performance, given the high-pressure circumstances to ensure that the basic operating system security program, for pipe cleaning robot system of the utility to provide a reliable basis.Key words: pipe robot; security; walkIII本科机械毕业设计论文CAD图纸 QQ 401339828目录摘要...................................................................... .. (I)IABSTRACT............................................................ . (III)绪论...................................................................... ........................................................................ (1)1 概述.............................................................................................................................................21.1 管道清洗机器人常见问题分析...................................................................... ..................... 2 1.2 除垢机器人理念...................................................................... ............................................. 2 1.3 基本设计任务...................................................................... ................................................. 3 1.4毕业设计的目的 ..................................................................... .............................................. 3 2.1 管道射流清洗机器人的本体设计...................................................................... .. (4)2.1.1 移动方式选择...................................................................... (4)2.1.2 传动方案的选择...................................................................... ...................................... 4 2.2 管道清洗机器人变管径自适应性方案设计.......................................................................62.3 动力系统的设计计算...................................................................... . (9)2.3.1 管道机器人行驶阻力分析...................................................................... . (9).................................................................... .......... 12 2.3.2 减速器的选择................................2.4 机器人的速度和驱动能力校核...................................................................... . (13)2.4.1 运动速度校核...................................................................... . (13)2.4.2 驱动能力校核...................................................................... ........................................ 13 3 链轮传动的设计计算...................................................................... ......................................... 153.1 链轮设计的初始条件...................................................................... ................................... 15 3.2 链轮计算结果 ..................................................................... .............................................. 15 3.3历史结果 ..................................................................... .. (16)4 蜗轮蜗杆的设计计算...................................................................... ......................................... 18 4.1 蜗轮蜗杆基本参数设计 ..................................................................... (18)4.1.1 普通蜗杆设计输入参数...................................................................... (18)4.1.2 材料及热处理...................................................................... . (19)4.1.3 蜗杆蜗轮基本参数...................................................................... .. (20)4.1.4 蜗蜗轮精度...................................................................... .. (21)4.1.5 强度刚度校核结果和参数...................................................................... .. (22)4.1.6 自然通风散热计算...................................................................................................... 22 4.2蜗杆轴的结构设计...................................................................... . (23)4.2.1 轴的强度较核计算...................................................................... .. (23)4.2.2 轴的结构设计...................................................................... . (27)4.2.3 键的校核...................................................................... ................................................ 27 5 弹簧的设计计算...................................................................... . (29)IV本科机械毕业设计论文CAD图纸 QQ 4013398286 安全性能 ..................................................................... .............................................................. 31 结论 ..................................................................... ........................................................................ .. 32 参考文献 ..................................................................... .................................................................. 34 致谢 ..................................................................... ........................................................................ .. 33V本科机械毕业设计论文CAD图纸 QQ 401339828绪论1.1本课题研究的内容和意义用于石油、天然气乃至民用上下水等管道在传输液、气体过程中,因温度、压力不同及介质与管道之间的物理化学作用,常常会高温结焦,生成油垢、水垢,存留沉积物,腐蚀物等,使有效传输管径减少,效率下降,物耗、能耗增加,工艺流程中断,设备失效,发生安全事故。
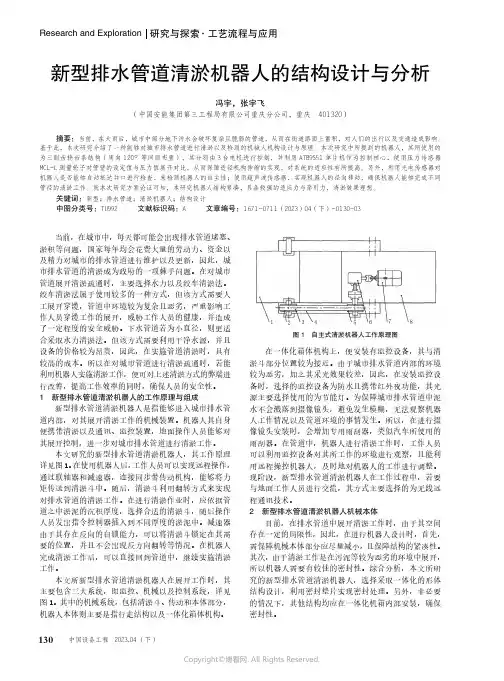
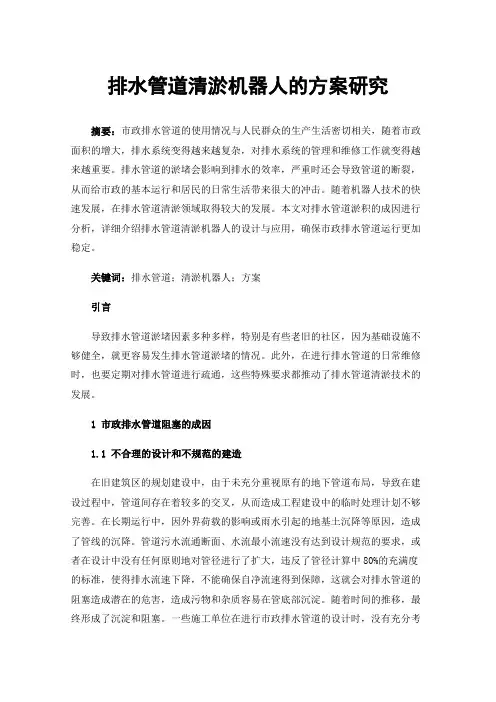
图1 自主式清淤机器人工作原理图
在一体化箱体机构上,便安装有监控设备,其与清淤斗部分位置较为接近。
由于城市排水管道内部的环境较为恶劣,加之其采光效果较差,因此,在安装监控设备时,选择的监控设备为防水且携带红外夜功能,其光源主要选择使用的为节能灯。
为保障城市排水管道中泥水不会溅落到摄像镜头,避免发生模糊,无法观察机器人工作情况以及管道环境的事情发生。
所以,在进行摄像镜头安装时,会增加专用雨刮器,类似汽车所使用的雨刮器。
在管道中,机器人进行清淤工作时,工作人员可以利用监控设备对其所工作的环境进行观察,且能利用远程操控机器人,及时地对机器人的工作进行调整。
现阶段,新型排水管道清淤机器人在工作过程中,若要与地面工作人员进行交流,其方式主要选择的为无线远
利用新型排水管道清淤机器人进行城市排水管道清淤,可以提高工作效率,降低城市排水管道清淤的总成本。
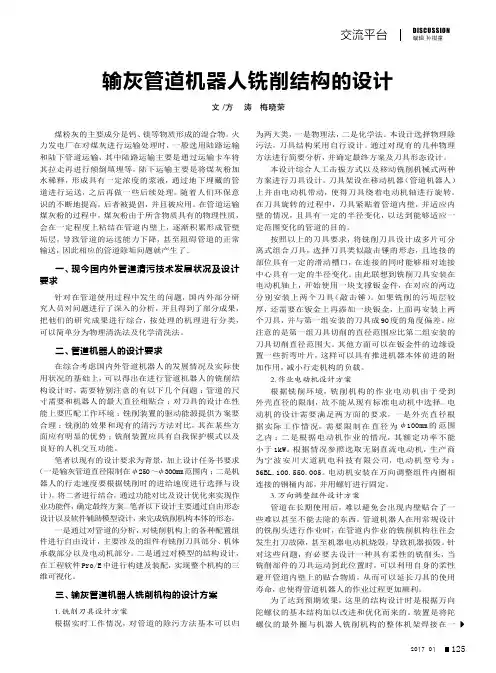
交流平台dISCUSSION编辑 孙祺童文 /方 涛 梅晓荣输灰管道机器人铣削结构的设计煤粉灰的主要成分是钙、镁等物质形成的混合物。
火力发电厂在对煤灰进行运输处理时,一般选用陆路运输和陆下管道运输,其中陆路运输主要是通过运输卡车将其拉走再进行倾倒填埋等,陆下运输主要是将煤灰粉加水稀释,形成具有一定浓度的浆液,通过地下埋藏的管道进行运送,之后再做一些后续处理。
随着人们环保意识的不断地提高,后者被提倡,并且被应用。
在管道运输煤灰粉的过程中,煤灰粉由于所含物质具有的物理性质,会在一定程度上粘结在管道内壁上,逐渐积累形成管壁垢层,导致管道的运送能力下降,甚至阻碍管道的正常输送,因此相应的管道除垢问题就产生了。
一、现今国内外管道清污技术发展状况及设计要求针对在管道使用过程中发生的问题,国内外部分研究人员对问题进行了深入的分析,并且得到了部分成果,把他们的研究成果进行综合,按处理的机理进行分类,可以简单分为物理清洗法及化学清洗法。
二、管道机器人的设计要求在综合考虑国内外管道机器人的发展情况及实际使用状况的基础上,可以得出在进行管道机器人的铣削结构设计时,需要特别注意的有以下几个问题:管道的尺寸需要和机器人的最大直径相贴合;对刀具的设计在性能上要匹配工作环境;铣削装置的驱动能源提供方案要合理;铣削的效果和现有的清污方法对比,其在某些方面应有明显的优势;铣削装置应具有自我保护模式以及良好的人机交互功能。
笔者以现有的设计要求为背景,加上设计任务书要求(一是输灰管道直径限制在φ250~φ300mm范围内;二是机器人的行走速度要根据铣削时的进给速度进行选择与设计),将二者进行结合,通过功能对比及设计优化来实现作业功能件,确定最终方案。
笔者以下设计主要通过自由形态设计以及软件辅助模型设计,来完成铣削机构本体的形态。
一是通过对管道的分析,对铣削机构上的各种配置组件进行自由设计,主要涉及的组件有铣削刀具部分、机体承载部分以及电动机部分。
一种机械式管道清淤机器人的设计沈体强摘要:文章设计了一种机械式管道清淤机器人,主要通过电动缸控制清淤斗升降和翻转的方式完成清淤工作。
介绍了清淤机器人的系统组成和工作原理,确定了主要技术参数。
该机械式管道清淤机器人的研究,开辟了一条解决排水管道淤积堵塞问题的道路。
关键词:机械式;管道清淤机器人;设计;研究1概述随着我国城市的建设和人民生活水平的提高,各省市的用水量不断增加,随之排水管道的排水量也不断增加。
而人们所排放的生活垃圾、工厂所排放的工业垃圾以及建筑垃圾等经常导致排水管道淤泥沉积,如果不按时清理,必然导致管道堵塞,污水溢流。
不仅会污染环境,还可能妨碍交通运输的正常运行,甚至给人们正常的生活带来困扰,损害市容市貌,给国家和人民造成巨大的经济损失。
我国排水管道的分布非常广泛,管道内部环境更是复杂多变,所以城市排水管道的清理和维护工作非常棘手。
目前,大多数情况下只能通过人工作业的方式进行清理,且清理效果不是很有效。
然而管道里往往含有一些有毒气体,给工人的工作带来了非常大的困难,而且容易对工人的身体健康造成伤害。
于是,我们设计了一种机械式管道清淤机器人,能够安全高效的清理管道淤泥,为城市管道清理工作提供了一种新的解决方法[1]-[3]。
2清淤机器人的系统组成及工作原理2.1清淤机器人的系统组成机械式管道清淤机器人主要由机械系统和控制系统两部分组成。
如图1所示,机器人的机械系统主要包括清淤斗清淤机构部分和一体化箱体结构。
机械式排水管道清淤机器人适用于管径300mm以上的排水管道,在管道内的空间是有限的,因此,机器人的整体结构参数要尽可能的小并且要保证输出稳定的清淤力[4]。
整机结构设计方面要着重考虑清淤机器人在管道中的密封问题,从机械设计的角度提高密封的可靠性,我们采用一体化箱式结构提高机器人的密封性[5]。
清淤机器人的总体结构设计采用轮式行走机构,以蓄电池为动力源,以电动缸驱动力控制清淤斗的升降和翻转。
中央空调通风管清洁机器人机器人创新设计机制083沈鑫随着我国国民经济和城市建设的快速发展,中央空调已成为改善人们工作与生活环境的必备设施目前全国共有上百万台中央空调亟待清洁保养,其中相当一部分中央空调的通风系统从未进行过彻底的清洁,清洁面积大且纵横交错的中央空调通风管道已经成为长期的卫生死角,由此造成的室内空气污染问题严重影响着人们的身体健康尤其在非典、禽流感、H1N1等疫情发生之后,人们对这一问题更加关注,政府也陆续出台了相关的清洁规范,费时费力且清洁效果不佳的传统人工清洁方式已不能满足现实的需要,利用机器人进行清洁的空调清洁业正在悄然兴起,但就目前而言,中央空调风道清洁机器人市场却基本上被价格昂贵的外国产品占据,这些外国产品动辄几十万,多则上百万,使一般的企业难于承受。
因此自主研发高性价比的中央空调风道清洁机器人对促进我国中央空调风道清洗行业的发展,改善室内空气质量提高人民生活和健康水平等具有积极的意义。
在西方一些发达国家,中央空调清洁业已发展了几十年,形成了一个巨大的产业,有着比较成熟的清洁机器人技术。
尽管国外清洗机器人技术先进性能优良,但由于不是针对国内风道状况而设计,在清洁国内的风道时往往效果不甚理想。
国内一些单位提出了自己的中央空调风道清洁机器人设计及方案,但面对国内尺寸规格变化万千的风道,在适应性和清洁的彻底性方面还显欠缺针对上述实际问题,文中提出了一种新型的清洁机器人系统。
1机器人总体方案系统清洁方案设计为节约建筑面积,国内建筑物的中央空调风道绝大部分设计成扁平矩形截面,且尺寸规格属非标产品,给风道清洁带来困难。
在进行风道清洁作业时,目前的清洁机器人需要经常更换不同尺寸的毛刷,操作繁琐,而且在两种不同尺寸风道的过渡处遇到毛刷与风道宽度不同的情况时必然会存在清洗死角,影响清洁效果文中设计的清洁方案采用横向俯仰二维运动拟合矩形清洁轨迹清洁风道,改变了现有清洁机器人只能作毛刷一维俯仰运动的现状,其工作原理如图1所示,该方案在毛刷旋转清洁风道时,如图1a中step1和step3所示,可以实现清洁臂的俯仰运动,同时还可以实现横向运动,如图1a中step2和step4所示。
摘要随着社会的发展,生产力也随着社会的进步也在一步步发展,故而导致了很多东西都随着科技的发展而出现、发展知道跟不上时代。
自动清洁机器人属于服务机器人,世界各国尤其是发达国家都在致力于研究开发和广泛使用服务机器人,中国的许多高等学府在这方面的研究都处于国内和世界领先水平。
如果自动清洁机器人具有优良的性价比,那么这个产品将具有广阔的市场前景。
相信在不久的将来,自动清洁机器人将无处不在,为我们的生活更好地服务。
本文在比较了国内多种清洁机器人的产品基础上,提出油烟管道清洁机器人整体设计方案。
介绍了清洁机器人的各个组成部分,侧重介绍了清洁机器人的传动系统部分。
最后通过查阅相关的设计手册,并对所设计的清洁机器人进行各个部分的计算校核,结果表明能达到油烟管所使用的清洁机器人设计要求。
关键词:清洁机器人,传动结构,系统设计ABSTRACTWith the development of society and productive with social progress and development, so in step by step causes a lot of things with the development of science and technology and the emergence, development know can't keep up with The Times. Automatic cleaning robot belong to the service robot, countries all over the world, especially the developed countries are engaged in research and development and extensive use of service robot, many Chinese universities in the research of this aspect are in domestic and world advanced level. If automatic cleaning robot has excellent cost-performance, then the product will have wide prospect of market. Believe in the near future, automatic cleaning robots will everywhere, for our lives better service.Based on the comparison of the domestic various cleaning robots product is proposed, based on the lampblack pipeline overall design scheme cleaning robots. Introduces the component part of cleaning robot is introduced, with emphasis on the transmission system clean robot part.Finally, by consulting relevant design manual, and the design of each part of the cleaning robots are calculated, the result shows that can reach check the use of clean pipe lampblack robot design requirements.Keywords: Cleaning robot, Transmission structure, System design第1章绪论1.1机器人概述人们一提到机器人往往联想起科幻电影和电视中虚构的人形机器形象,他们外形如人,智能、武功超群。
排水管道清淤机器人的方案研究摘要:市政排水管道的使用情况与人民群众的生产生活密切相关,随着市政面积的增大,排水系统变得越来越复杂,对排水系统的管理和维修工作就变得越来越重要。
排水管道的淤堵会影响到排水的效率,严重时还会导致管道的断裂,从而给市政的基本运行和居民的日常生活带来很大的冲击。
随着机器人技术的快速发展,在排水管道清淤领域取得较大的发展。
本文对排水管道淤积的成因进行分析,详细介绍排水管道清淤机器人的设计与应用,确保市政排水管道运行更加稳定。
关键词:排水管道;清淤机器人;方案引言导致排水管道淤堵因素多种多样,特别是有些老旧的社区,因为基础设施不够健全,就更容易发生排水管道淤堵的情况。
此外,在进行排水管道的日常维修时,也要定期对排水管道进行疏通,这些特殊要求都推动了排水管道清淤技术的发展。
1 市政排水管道阻塞的成因1.1 不合理的设计和不规范的建造在旧建筑区的规划建设中,由于未充分重视原有的地下管道布局,导致在建设过程中,管道间存在着较多的交叉,从而造成工程建设中的临时处理计划不够完善。
在长期运行中,因外界荷载的影响或雨水引起的地基土沉降等原因,造成了管线的沉降。
管道污水流通断面、水流最小流速没有达到设计规范的要求,或者在设计中没有任何原则地对管径进行了扩大,违反了管径计算中80%的充满度的标准,使得排水流速下降,不能确保自净流速得到保障,这就会对排水管道的阻塞造成潜在的危害,造成污物和杂质容易在管底部沉淀。
随着时间的推移,最终形成了沉淀和阻塞。
一些施工单位在进行市政排水管道的设计时,没有充分考虑到施工地区地下管线的布置特征,导致工程不能适应施工要求。
市政排水管道在施工过程中,由于施工图纸的不正确,会造成排水管道的塌陷、破裂,1.2 使用不当,维修不及时在施工过程中,对其进行的管理存在着一定的问题。
比如,水泥砂浆、磨石浆、碎砖渣、木料等,都会在不经意间被丢弃到管道中,从而造成之后的管道出现堵塞,对排水造成不好的影响,并且难以进行疏通。
管道机器人毕业设计开题报告开题报告:管道机器人毕业设计(论文)摘要:在现代工业领域中,管道系统的维护和管理是一个十分重要的任务。
传统的管道维修方法通常需要人工操作,但这种方式存在时间长、工作强度大、操作环境恶劣等问题。
为了解决这些问题,本文将设计一个管道机器人系统,实现管道的智能巡检和维护。
该系统将采用机器人技术、图像处理和控制算法,可以准确地检测管道的损坏并进行修复,提高了工作效率和安全性。
本文将详细分析该系统的设计原理和实现方法,评估其性能和效果,从而为工业领域中的管道维护任务提供一种创新的解决方案。
一、研究背景和意义:管道系统是现代工业生产和生活中的重要组成部分,承担着输送液体、气体和固体物料的功能。
然而,由于长期使用和环境因素的影响,管道系统容易出现漏损、腐蚀和堵塞等问题,导致生产效率下降和安全隐患增加。
传统的管道维修方法通常需要人工进入管道进行检修,这不仅费时费力,而且存在一定的安全风险。
为了解决传统管道维修方法存在的问题,近年来,管道机器人技术受到了广泛关注。
管道机器人是指能够在管道中自主运行、检测和维修的机器人系统。
它可以利用传感器和图像处理技术对管道内的损伤进行检测和定位,并通过操纵机械臂等装置进行维护和修复。
相比传统方法,管道机器人具有工作效率高、安全性好、适用范围广等优势,已广泛应用于石油、化工、供水、排水等行业。
二、研究内容和方法:本文的研究内容是设计和实现一种管道机器人系统,实现对管道的智能巡检和维护。
基于机器人技术、图像处理和控制算法,该系统主要包括以下几个部分:1.硬件设计:设计机器人的结构和传感器装置,以实现在管道中自由运动和损伤检测等功能。
此外,还需要设计操纵机械臂的装置,实现维护和修复操作。
2.软件设计:开发管道机器人的控制程序和图像处理算法。
控制程序通过对传感器信息的处理和分析,实现机器人的智能导航和操作控制。
图像处理算法用于对管道内部的图像进行分析和损伤定位。
中央空调管道清洗机器人控制系统设计何琴【摘要】In order to solve the problems of central air conditioning duct diameter non-standard and the difficulty of the duct cleaning,the automatic centering technology was investigated. After analysing the central air conditioning duct cleaning robot control system,adopting a modular design thought, taking ATmega64 microcontroller as the control core,the relations between modules were established. A method was presented to the central air conditioning duct cleaning robot control system design. The cleaning technology was evaluated based on the existing cleaning technology. The results show that the cleaning robot can achieve automatic centering to adapt different pipe diameters to finish cleaning tasks, provide a broad application prospects for central air conditioning duct cleaning technology.%为解决中央空调管道清洗难及管径不规范等问题,将自动定心技术应用到管道清洗机器人中,开展了中央空调管道清洗机器人控制系统方案分析与设计.采用模块化的设计思想,以ATmega64单片机为控制核心,建立了各个功能模块之间的关系,实现了中央空调管道清洗机器人整个控制系统的方案设计.在现有的中央空调管道清洗技术基础上,对相关研究成果进行了对比分析及评价.研究结果表明,所设计的清洗机器人能够实现自动定心以适应不同的空调管径,完成清洗作业,为中央空调管道清洗技术提供了广阔的应用前景.【期刊名称】《机电工程》【年(卷),期】2011(028)008【总页数】4页(P944-947)【关键词】中央空调;清洗;机器人;ATmega64【作者】何琴【作者单位】武汉理工大学机电工程学院,湖北武汉430070【正文语种】中文【中图分类】TH39;TP2420 引言近年来,随着我国城市建设高速发展,越来越多的楼宇采用集中空调系统,同时关于保持空调通风系统洁净(特别是高层建筑的通风管道)的问题也随之产生。
目录1. 绪论 (1)1.1机器人的发展综述 (1)1.1.1 机器人定义 (1)1.1.2 我国科学家对机器人的定义 (1)1.1.3 机器人发展简史 (2)1.2管道机器人概述 (4)1.2.1 国外管道机器人发展现状 (4)1.2.2 国内管道机器人发展现状 (4)1.3管道清灰机器人系统概述 (5)1.3.1 管道清灰机器人驱动方式 (5)1.3.2 管道清灰机器人操作臂设计要求 (6)1.3.3 管道清灰机器人行走机构设计 (6)1.3.4 管道清灰机器人系统组成 (7)2.管道清灰机器人本体结构的设计和三维模型的建立 (8)2.1P RO/E NGINEER软件的介绍 (8)2.1.1 Pro/E的系统特征 (8)2.1.2 Pro/Engineer主要模块介绍 (9)2.2管道清灰机器人本体结构三维模型的建立 (11)3. 管道清灰机器人运动学分析 (23)3.1机器人操作臂类型选择 (23)3.2铲斗转角差及卸载角分析 (25)3.3机器人操作臂自由度 (26)3.4操作臂死点分析 (26)4. 管道机器人运动机构仿真 (29)4.1铲斗铲灰 (29)4.2 铲斗举升 (31)4.3 铲斗旋转 (32)结论 (34)致谢 ................................................... 错误!未定义书签。
参考文献 . (34)1. 绪论1.1 机器人的发展综述1.1.1 机器人定义在科技界,科学家会给每一个科技术语一个明确的定义,但机器人问世已有几十年,机器人的定义仍然仁者见仁,智者见智,没有一个统一的意见。
原因之一是机器人还在发展,新的机型,新的功能不断涌现。
机器人涉及到了人的概念,成为一个难以回答的哲学问题。
就像机器人一词最早诞生于科幻小说之中一样,人们对机器人充满了幻想。
也许正是由于机器人定义的模糊,才给了人们充分的想象和创造空间。
机器人主要类型:操作型机器人:能自动控制,可重复编程,多功能,有几个自由度,可固定或运动,用于相关自动化系统中。
程控型机器人:按预先要求的顺序及条件,依次控制机器人的机械动作。
示教再现型机器人:通过引导或其它方式,先教会机器人动作,输入工作程序,机器人则自动重复进行作业。
数控型机器人:不必使机器人动作,通过数值、语言等对机器人进行示教,机器人根据示教后的信息进行作业。
感觉控制型机器人:利用传感器获取的信息控制机器人的动作。
适应控制型机器人:机器人能适应环境的变化,控制其自身的行动。
学习控制型机器人:机器人能“体会”工作的经验,具有一定的学习功能,并将所“学”的经验用于工作中。
智能机器人:以人工智能决定其行动的机器人。
1.1.2 我国科学家对机器人的定义我国科学家对机器人的定义是:“机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器”。
在研究和开发未知及不确定环境下作业的机器人的过程中,人们逐步认识到机器人技术的本质是感知、决策、行动和交互技术的结合。
随着人们对机器人技术智能化本质认识的加深,机器人技术开始源源不断地向人类活动的各个领域渗透。
结合这些领域的应用特点,人们发展了各式各样的具有感知、决策、行动和交互能力的特种机器人和各种智能机器,如移动机器人、微机器人、水下机器人、医疗机器人、军用机器人、空中空间机器人、娱乐机器人等。
对不同任务和特殊环境的适应性,也是机器人与一般自动化装备的重要区别。
这些机器人从外观上已远远脱离了最初仿人型机器人和工业机器人所具有的形状,更加符合各种不同应用领域的特殊要求,其功能和智能程度也大大增强,从而为机器人技术开辟出更加广阔的发展空间。
中国工程院院长宋健指出:“机器人学的进步和应用是20世纪自动控制最有说服力的成就,是当代最高意义上的自动化”。
机器人技术综合了多学科的发展成果,代表了高技术的发展前沿,它在人类生活应用领域的不断扩大正引起国际上重新认识机器人技术的作用和影响。
我国的机器人专家从应用环境出发,将机器人分为两大类,即工业机器人和特种机器人。
所谓工业机器人就是面向工业领域的多关节机械手或多自由度机器人。
而特种机器人则是除工业机器人之外的、用于非制造业并服务于人类的各种先进机器人,包括:服务机器人、水下机器人、娱乐机器人、军用机器人、农业机器人、机器人化机器等。
在特种机器人中,有些分支发展很快,有独立成体系的趋势,如服务机器人、水下机器人、军用机器人、微操作机器人等。
目前,国际上的机器人学者,从应用环境出发将机器人也分为两类:制造环境下的工业机器人和非制造环境下的服务与仿人型机器人,这和我国的分类是一致的。
1.1.3 机器人发展简史(引自《环球科学》2007年第二期)1920年捷克斯洛伐克作家卡雷尔·恰佩克在他的科幻小说《罗萨姆的机器人万能公司》中,根据Robota(捷克文,原意为“劳役、苦工”)和Robotnik(波兰文,原意为“工人”),创造出“机器人”这个词。
1939年美国纽约世博会上展出了西屋电气公司制造的家用机器人Elektro。
它由电缆控制,可以行走,会说77个字,甚至可以抽烟,不过离真正干家务活还差得远。
但它让人们对家用机器人的憧憬变得更加具体。
1942年美国科幻巨匠阿西莫夫提出“机器人三定律”。
虽然这只是科幻小说里的创造,但后来成为学术界默认的研发原则。
1948年诺伯特·维纳出版《控制论》,阐述了机器中的通信和控制机能与人的神经、感觉机能的共同规律,率先提出以计算机为核心的自动化工厂。
1954年美国人乔治·德沃尔制造出世界上第一台可编程的机器人,并注册了专利。
这种机械手能按照不同的程序从事不同的工作,因此具有通用性和灵活性。
1956年在达特茅斯会议上,马文·明斯基提出了他对智能机器的看法:智能机器“能够创建周围环境的抽象模型,如果遇到问题,能够从抽象模型中寻找解决方法”。
这个定义影响到以后30年智能机器人的研究方向。
1959年德沃尔与美国发明家约瑟夫·英格伯格联手制造出第一台工业机器人。
随后,成立了世界上第一家机器人制造工厂——Unimation公司。
由于英格伯格对工业机器人的研发和宣传,他也被称为“工业机器人之父”。
1962年美国AMF公司生产出“VERSTRAN”(意思是万能搬运),与Unimation公司生产的Unimate一样成为真正商业化的工业机器人,并出口到世界各国,掀起了全世界对机器人和机器人研究的热潮。
1962年-1963年传感器的应用提高了机器人的可操作性。
人们试着在机器人上安装各种各样的传感器,包括1961年恩斯特采用的触觉传感器,托莫维奇和博尼1962年在世界上最早的“灵巧手”上用到了压力传感器,而麦卡锡1963年则开始在机器人中加入视觉传感系统,并在1965年,帮助MIT推出了世界上第一个带有视觉传感器,能识别并定位积木的机器人系统。
1965年约翰·霍普金斯大学应用物理实验室研制出Beast机器人。
Beast已经能通过声纳系统、光电管等装置,根据环境校正自己的位置。
20世纪60年代中期开始,美国麻省理工学院、斯坦福大学、英国爱丁堡大学等陆续成立了机器人实验室。
美国兴起研究第二代带传感器、“有感觉”的机器人,并向人工智能进发。
1968年美国斯坦福研究所公布他们研发成功的机器人Shakey。
它带有视觉传感器,能根据人的指令发现并抓取积木,不过控制它的计算机有一个房间那么大。
Shakey可以算是世界第一台智能机器人,拉开了第三代机器人研发的序幕。
1969年日本早稻田大学加藤一郎实验室研发出第一台以双脚走路的机器人。
加藤一郎长期致力于研究仿人机器人,被誉为“仿人机器人之父”。
日本专家一向以研发仿人机器人和娱乐机器人的技术见长,后来更进一步,催生出本田公司的ASIMO和索尼公司的QRIO。
1973年世界上第一次机器人和小型计算机携手合作,就诞生了美国Cincinnati Milacron公司的机器人T3。
1978年美国Unimation公司推出通用工业机器人PUMA,这标志着工业机器人技术已经完全成熟。
PUMA至今仍然工作在工厂第一线。
1984年英格伯格再推机器人Helpmate,这种机器人能在医院里为病人送饭、送药、送邮件。
同年,他还预言:“我要让机器人擦地板,做饭,出去帮我洗车,检查安全”。
1998年丹麦乐高公司推出机器人(Mind-storms)套件,让机器人制造变得跟搭积木一样,相对简单又能任意拼装,使机器人开始走入个人世界。
1999年日本索尼公司推出犬型机器人爱宝(AIBO),当即销售一空,从此娱乐机器人成为目前机器人迈进普通家庭的途径之一。
2002年丹麦iRobot公司推出了吸尘器机器人Roomba,它能避开障碍,自动设计行进路线,还能在电量不足时,自动驶向充电座。
Roomba是目前世界上销量最大、最商业化的家用机器人。
2006年 6月,微软公司推出Microsoft Robotics Studio,机器人模块化、平台统一化的趋势越来越明显,比尔·盖茨预言,家用机器人很快将席卷全球。
1.2 管道机器人概述在工农业生产及日常生活中,管道作为一种重要的物料输送手段,其应用范围日益广泛,数量也不断增多。
管道工程在国民经济许多行业中如石化、天然气、核工业、给排水、管道输送等行业起着极其重要的作用。
管道在使用过程中,由于各种外界因素的影响,会形成各种各样的管道故障与管道损伤。
如果不及时对管道检测、维修及清洗就可能会产生事故,形成不必要的损失和浪费。
然而,管道所处的环境往往是人们不易直接达到或不允许人们直接进入的,检修及清洗难度很大。
因此最有效的方法之一就是利用管道机器人来实现管道内的在线检测、维修和清洗。
管内机器人是一种可沿管道自动行走,携有一种或多种传感器件和作业机构,在遥控操作或计算机控制下能在极其恶劣的环境中进行一系列管道作业的机电一体化系统。
1.2.1 国外管道机器人发展现状对较长距离管道的直接检测、清理技术的研究始于本世纪50年代美、英、法、德、日等国,受当时的技术水平的限制,主要成果是无动力的管内检测清理设备一PIG,由于PIG本身没有行走能力,其移动速度、检测区域均不易控制,所以不能算作管内机器人。
70年代以后,石油、化工、天然气及核工业的发展为管道机器人的应用提供了广阔而诱人的前景,而机器人学、计算机、传感器等理论和技术的发展,也为管内和管外自主移动机器人的研究和应用提供了技术保证。
日、美、法、德等国在此方面作了大量研究工作,其中日本从事管道机器人研究的人员最多,成果也最多。
1.2.2 国内管道机器人发展现状我国管内移动机器人技术的研究己有十几年的历史,中国科学院沈阳自动化研究所、上海交通大学、大庆石油管理局、胜利油田、中原油田等单位都进行了这方面的研究工作。