炮台打靶模拟系统的研制
- 格式:doc
- 大小:225.00 KB
- 文档页数:13
某型舰炮武器系统训练模拟器设计作者:牛效兵白洪宝李立纬来源:《电脑知识与技术》2015年第34期摘要:为满足某型舰炮武器系统教学训练需求,结合半实物仿真和虚拟建模,研制了该训练模拟器;介绍了该训练模拟器的总体设计思路,详细论述了模拟器的功能及组成,操作训练和故障排除的仿真方法,该模拟器能较好地满足任职教育院校培养学员岗位任职能力的需求,并且对新装备训练模拟器的开发具有较强的借鉴作用。
关键词:模拟器;模拟训练;故障模拟中图分类号:TM743 文献标识码:A 文章编号:1009-3044(2015)34-0191-02Abstract: In order to meet the training needs of a certain type of naval gun weapon system,combined with the semi physical simulation and virtual modeling, the training simulator is developed. The general design idea of the training simulator is introduced. The function and composition of the simulator and the simulation method of the operation training and fault elimination are discussed in detail. The simulator can meet the needs of training posts competencies of students in assignment education academy. And it has a strong reference to the development of new equipment training simulator.Key words: simulator; simulation training; fault simulation1 概述由于受到装备、场地、经费、维护保养等条件的限制,某型舰炮武器系统实装联动及故障排除训练很难开展,尤其是实装不可能随意产生各种故障现象,装备故障分析排除的训练更是难以开展,而模拟训练以安全、经济、不受气候条件和场地限制、能实现“全任务”训练、大批量训练等独特优势,成为解决上述问题的主要途径。
模拟电磁曲射炮设计张泽旭邵化壮刘鹏徐辑林胡志成(山东农业大学机械与电子工程学院,山东泰安271018)摘要:模拟电磁曲射炮在军事、工业等方面都有实际应用意义。
现设计了模拟电磁曲射炮系统,该设计以STM32单片机作为主控芯片,通过OpenMV3采集数据给单片机进行数据处理,通过舵机对云台进行角度和方向调整,还可以手动通过按键输入距离和角度对云台进行调整,瞄准标识物体,通过继电器控制电磁炮的充电和放电,通过程序对弹丸初速度和舵机角度进行调整,间接控制弹丸运动,最终实现对目标靶的精准射击。
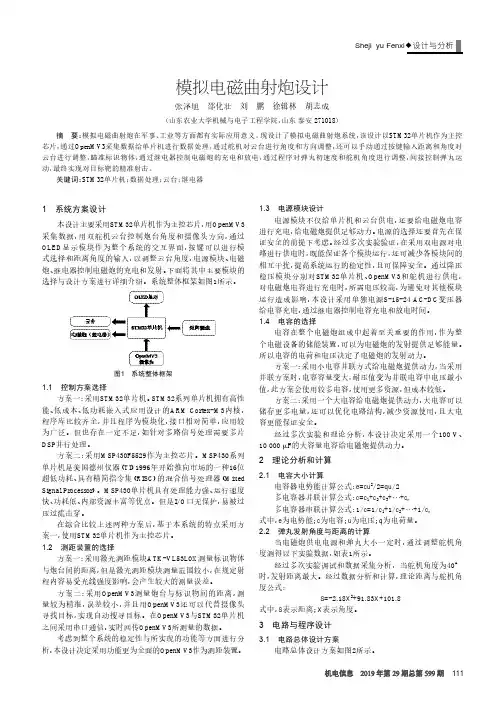
关键词:STM32单片机;数据处理;云台;继电器1系统方案设计本设计主要采用STM32单片机作为主控芯片,用OpenMV3采集数据,用双舵机云台控制炮台角度和摄像头方向,通过OLED 显示模块作为整个系统的交互界面,按键可以进行模式选择和距离角度的输入,以调整云台角度,电源模块、电磁炮、继电器控制电磁炮的充电和发射。
下面将其中主要模块的选择与设计方案进行详细介绍。
系统整体框架如图1所示。
1.1控制方案选择方案一:采用STM32单片机。
STM32系列单片机拥有高性能、低成本、低功耗嵌入式应用设计的ARM Cortex -M3内核,程序库比较齐全,并且程序为模块化,接口相对简单,应用较为广泛。
但也存在一定不足,如针对多路信号处理需要多片DSP 并行处理。
方案二:采用MSP430F5529作为主控芯片。
MSP430系列单片机是美国德州仪器(TI )1996年开始推向市场的一种16位超低功耗、具有精简指令集(RISC )的混合信号处理器(Mixed Signal Processor )。
MSP430单片机具有处理能力强、运行速度快、功耗低、内部资源丰富等优点。
但是I /O 口无保护,易被过压过流击穿。
在综合比较上述两种方案后,基于本系统的特点采用方案一,使用STM32单片机作为主控芯片。
1.2测距装置的选择方案一:采用激光测距模块ATK -VL53L0X 测量标识物体与炮台间的距离,但是激光测距模块测量范围较小,在规定射程内容易受光线强度影响,会产生较大的测量误差。
舰炮武器系统仿真试验平台的建立与应用一、绪论A. 研究背景和意义B. 国内外研究现状和发展动态C. 研究目的和意义二、理论基础A. 舰炮武器系统基本原理B. 仿真试验技术的基本原理C. 舰炮武器系统仿真试验平台的基本要求三、舰炮武器系统仿真试验平台的建立A. 舰炮武器系统仿真试验平台的系统设计B. 舰炮武器系统仿真试验平台的软硬件环境构建C. 舰炮武器系统仿真试验平台的组成与运行原理四、应用实例分析A. 舰炮武器系统仿真试验平台的测试案例及结果分析B. 舰炮武器系统仿真试验平台的可行性证明C. 舰炮武器系统仿真试验平台的应用前景展望五、结论A. 主要研究成果总结B. 存在的问题与改进措施C. 后续研究展望及发展方向一、绪论A. 研究背景和意义舰炮武器系统是海上作战中的重要武器装备之一,其直接决定着海上作战力量的攻击打击能力。
随着科学技术的不断发展,现代舰炮武器系统不断提高了其射击精度、射程、威力以及自动化程度等方面的性能指标,从而大幅度提高其在海上作战中的实用性和效能。
随着互联网及数字技术等的发展成熟,仿真技术的应用也越来越广泛,并逐渐被应用到了武器装备的设计、建模、仿真以及真实环境下的验证等各个领域。
因此,利用仿真技术对舰炮武器系统的建模及仿真,可有效降低开发成本、提高装备性能、减少实际环境下的测试次数,是未来发展的方向。
B. 国内外研究现状和发展动态目前,国内外对于舰炮武器系统仿真技术的应用日趋广泛。
国外在舰炮武器系统仿真试验方面已有多个平台,如美国海军研究实验室(NSWC)推出的WEPS、美国陆军兵器研究发展工程中心(ARDEC)开发的BCS和SYSCOM,以及俄罗斯的KET等。
而国内则由于缺乏相关技术和资金的投入,在舰炮武器系统仿真试验上相对滞后,需进一步提高技术水平。
C. 研究目的和意义本论文旨在通过对舰炮武器系统仿真试验平台的建立、应用案例的模拟分析及数据研究,探讨利用仿真技术对该系统进行建模仿真的可行性、效果和应用前景等问题,为舰炮武器系统仿真试验的相关研究提供一定的理论指导和实践基础,以此来提高舰炮武器系统在海上作战中的实用性和效能。

学生军训激光模拟打靶系统设计
王辉;姜大鹏;曾光宇
【期刊名称】《应用科技》
【年(卷),期】2009(036)012
【摘要】针对当前国内学生军训射击训练中存在的问题,设计了一套基于图像处理技术的激光模拟射击训练系统.该系统由发射部分和接收处理部分组成,发射部分结合了7.62mm口径冲锋枪制作了简易的激光发射机,发射到靶面上的激光由CCD 摄像机获取送至PC机进行处理,并在VC++6.0开发环境下设计了管理及显示界面,最后结合单片机系统实现了自动语音报靶功能.试验表明:此系统可以更真实地模拟实弹射击训练,满足学生军训射击训练的要求.
【总页数】3页(P45-47)
【作者】王辉;姜大鹏;曾光宇
【作者单位】中北大学信息与通信工程学院,山西,太原,030051;中北大学机电工程学院,山西,太原,030051;中北大学信号检测重点实验室,山西太原,030051
【正文语种】中文
【中图分类】TP751.2
【相关文献】
1.激光打靶多路数据通信系统设计 [J], 周锐;周健
2.基于帧同步技术的激光打靶控制系统设计 [J], 王宏松;李杰;
3.无线激光打靶系统设计 [J], 柴婷婷;何小刚;闫瑞杰
4.基于opencv的激光打靶自动报靶系统设计 [J], 林木泉;陈逸凡;林千龙
5.用预脉冲打靶提高强激光吸收效率的模拟计算——激光与等离子体相互作用的理论模拟(Ⅲ) [J], 彭惠民;张国平;盛家田
因版权原因,仅展示原文概要,查看原文内容请购买。
炮兵射击指挥模拟系统通用平台设计方案
胡建旺
【期刊名称】《情报指挥控制系统与仿真技术》
【年(卷),期】1998(000)010
【摘要】本文结合各种射击指标系统,提出了炮兵射击指挥模拟系统通用平台总体设计方案,并且具体讨论了各部分的构成和功能。
【总页数】4页(P66-68,31)
【作者】胡建旺
【作者单位】不详;不详
【正文语种】中文
【中图分类】E933.3
【相关文献】
1.炮兵射击指挥系统的智能检测诊断系统 [J], 陈国顺;王格芳;王学明;马飒飒
2.基于神经网络专家系统的炮兵射击指挥系统故障诊断 [J], 魏长流;敖世奇
3.炮兵射击指挥系统嵌入式测试平台设计 [J], 段修生;单甘霖;高庆
4.以色列师炮兵射击指挥系统功能要求及特点分析 [J], 盛江
5.炮兵分队指挥训练模拟系统设计及实现 [J], 王磊;刘怡昕;高才喜
因版权原因,仅展示原文概要,查看原文内容请购买。
虚拟舰炮仿真训练系统的研究与设计
赵伟;吴旭光;成静
【期刊名称】《火力与指挥控制》
【年(卷),期】2009(034)002
【摘要】由于进行实弹射击的组织实施复杂,花费多,危险性大,易受天气,海况等条件影响,海军舰艇部队进行的实弹射击训练非常有限,远不能达到实战的需要.基于虚拟现实技术,对舰炮射击仿真训练模拟器的软件、硬件进行了总体设计,研究了炮弹弹道坐标的解算问题,使用Vega结合Creator进行视景系统的开发,研究建立了桌面式的虚拟现实系统.基本实现了舰炮射击仿真训练模拟器的桌面原型系统.
【总页数】4页(P76-79)
【作者】赵伟;吴旭光;成静
【作者单位】西北工业大学航海学院,陕西,西安,710072;西北工业大学航海学院,陕西,西安,710072;西北工业大学航海学院,陕西,西安,710072
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.舰艇对空作战仿真训练系统中舰炮毁伤效果判定与仿真磁 [J], 吉玉洁;马志军;刘蜀
2.手工电弧焊焊接仿真训练系统总体架构的研究与设计 [J], 许崇良;董云杰;
3.某型舰炮虚拟仿真训练系统的实践研究 [J], 白洪宝;王海滨;牛效兵;李立纬
4.某型舰炮虚拟仿真训练系统的实践研究 [J], 白洪宝;王海滨;牛效兵;李立纬;;;;
5.新生儿PICC置管操作虚拟仿真训练考评系统的设计与初步应用 [J], 王雪君;姜红;肖适崎;范玲
因版权原因,仅展示原文概要,查看原文内容请购买。
间瞄火炮室内仿真训练模拟系统研究——迫击炮训练模拟系
统
王江春
【期刊名称】《系统仿真学报》
【年(卷),期】2008(20)8
【摘要】介绍的迫击炮训练模拟系统,解决了间瞄武器训练模拟系统常出现的成像测量难题,实现了室内三维成像间接测量与实装设备现场测算地无缝融合。
系统全过程模拟分队实弹射击的组织与实施过程,为迫击炮兵训练提供一种经济、有效的训练方式。
【总页数】5页(P2018-2022)
【作者】王江春
【作者单位】总参谋部第六十研究所
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.某自行火炮指挥车训练仿真系统研究
2.某型火炮液压训练模拟系统实现研究
3.STC单片机在炮瞄训练模拟系统中的应用
4.间瞄火炮射击训练模拟系统的设计与实现
5.基于刚体运动学仿真的坦克训练模拟系统研究
因版权原因,仅展示原文概要,查看原文内容请购买。
靶场导弹试验训练仿真系统关键技术研究陈 敏,汤晓安,胡昆明(国防科学技术大学,长沙 410073)摘 要:根据靶场导弹试验训练任务的实际需求,研制了一个面向靶场的导弹试验训练仿真系统。
首先提出了导弹试验训练仿真系统体系结构及其处理流程;然后分析了其中视景仿真子系统各部分的功能;最后针对该子系统中复杂场景的实时绘制问题,给出了场景的动态调度与数据裁减方法。
实验结果表明,该方法能够在保证较高逼真度的前提下对靶场环境进行模拟,并能够依据观测数据对导弹飞行过程进行实时仿真,可以较好地满足导弹试验训练的实际需求。
关键词:导弹;试验训练;体系结构;数据调度中图分类号:T J76016 文献标志码:AR esearch on K ey T echniques for Missile T esting andT raining Simulation SystemCH EN Min,TAN G Xiaoan,HU Kunming(National University of Defence Technology,Changsha410073,China)Abstract:Firstly,an architecture and the perform process of this testing and training simulation system are put forward. Then the functions of its visual simulation subsystem are discussed.Finally,in order to solve the real2time rendering of complex scene which is a key problem of the visual simulation subsystem,a method of data dynamic schedule and data extract is declared.Experimentation shows that the present method can simulate environment of shooting range upon the proposition that the present method ensures the high fidelity of the scene,and this method can realize missile real2 time simulation according to the measurement data.K eyw ords:missile;testing and training simulation;architecture;data schedule1 引言导弹试验训练仿真系统对于降低导弹研制成本、降低研制风险、提供有效模拟实弹训练手段以及提高试验训练后期的数据处理分析能力等方面均起到了重要作用。
炮台打靶模拟系统的研制摘要:设计并实现了一种能够手动和自动瞄准的炮台打靶系统,通过激光器代替炮弹模拟打靶过程。
该系统分为电子靶和炮台两部分,其中电子靶以STC12C5604AD微处理器为核心,采用光敏电阻阵列捕获炮台的命中情况;炮台部分以MCF52255微处理器为核心,可通过电机带动激光器水平和垂直转动,采用摇杆实现手动瞄准,使用摄像头识别靶心实现自动瞄准。
实验表明,该系统可快速完成瞄准,并实时显示和播报打靶结果;自动打靶环数为9~10环,具有很高精度。
关键词:炮台打靶自动瞄准电子靶摄像头随着电子技术的发展,人们对生产和生活中各种设备的自动化程度要求越来越高,能否简单迅速地对远处目标进行定位并执行相应的控制步骤,是衡量设备自动控制水平的一项重要指标[1]。
该文是2012年黑龙江省大学生电子设计竞赛设置的题目之一,充分体现了定位控制技术的重要意义。
赛题要求炮台打靶模拟系统具有炮台和电子靶两部分。
采用红色激光笔代替火炮,通过电机控制激光笔沿水平和竖直方向转动,实现瞄准功能。
电子靶的中心环数是10环,最外圈是6环,共五个环数等级。
中心10环的直径为1?cm,其他环相邻的两环半径差为1cm,整个靶面为17cm的正方形,不准利用靶环区引导炮塔。
炮台与电子靶水平相距2~3m,竖直距离在1m之内,且二者之间不能通信。
能够通过手动和自动两种方式实现炮台的瞄准射击功能,电子靶在被击中后能够迅速地显示并播报相应环数和总环数。
该文所完成的装置获2012年黑龙江省大学生电子设计竞赛一等奖。
1 系统方案设计炮台打靶模拟系统分为电子靶和炮台两部分,彼此间没有电气连接,下文将对这两部分设计方案分别介绍。
1.1 电子靶方案设计对于电子靶而言,需要完成检测、处理、显示、播报等环节,为了保证系统的可靠性和灵活性,采用多模块结构完成这些功能,将检测处理功能和显示播报功能分别用一个单片机控制实现。
当特定的靶环上有激光照射时,一个单片机检测到传感器输出信号的变化并判断出被击中的环数后,将该环数传给另一片单片机,由其控制完成环数的语音播报和数码显示。
电子靶的结构框图如图1所示。
在设计出电子靶的整体系统后,优化电子靶面传感器排布的问题成为了关键。
光敏电阻具有光照下阻值显著减小的特性[2]。
在靶环区放置光敏电阻并分别按环并联,将并联后的各组电压值送到比较器的一端,通过给比较器另一端设置合适的阈值电压,就可以检测出哪一环有激光照射。
图2所示为电子靶示意图及靶面传感器排布设计图。
在图2(b)中,由于红色激光炮的光源是点光源,直接打在电阻环上的着落面积很小,因此若要实现靶面上传感器排布无盲区,就需要数量很多的光敏电阻。
如图2(b)所示,用白纸将靶罩住,使点光源发生散射从而增大激光在靶面上的照射面积,能有效地减少光敏电阻数量。
由于光敏电阻对日光也同样敏感,在日光较强时容易造成误判,为此在白纸下放置多层红色滤光纸遮挡电子靶以减少照射到光敏电阻的日光强度而不影响激光炮所发出红色光束的透射,可提高系统抗环境干扰能力。
对于环与环之间的干扰问题,使用黑色卡纸按照电子靶各环的边界大小制成2?cm高的隔栅将每一环的光敏电阻隔开,如图2(d)所示。
此外,为了防止并联在一起的电阻过多阻值变小而缩短了光敏电阻两端电压变化范围,导致激光照射时电压变化不明显,我们将最外圈两环各分成两组,其余电阻数量较少的环可以每环并联成一组。
图3为整个靶面的传感器分布情况,其中靶环区的每个小圆形代表一个光敏电阻,相同图案的光敏电阻并联成一组,两个红外发光管的作用是炮台定位引导。
1.2 炮台方案设计炮台瞄准要求有手动和自动两种方式,其总体结构框图如图4所示。
手动瞄准使用摇杆控制。
摇杆具有两个滑动变阻器,当其在横、竖两个方向转动不同角度时,相应方向上的滑动变阻器的输电压值也会随之改变。
通过辅助单片机对这两组电压值进行AD采集,并转化成的数字信号送入核心单片机进行分析,从而控制两个减速电机的转向和转速以改变炮台位置;同时,使用辅助单片机检测发射按键是否按下,从而实现炮台发炮的控制。
自动控制部分选用摄像头作为图像传感器,固定摄像头使之与激光炮的方向相同。
正常情况下,摄像头视野内各种颜色的景物和光线会大大增加图像分析的难度,因此,我们使用红外光透镜遮住摄像头,使其只对红外光线敏感。
如图3所示在电子靶上布置有两个红外发光管,则在普通光照条件下整个摄像头采集的图像中仅有发光管处为两个亮点,其余部分均为较深的暗色。
如图5所示为摄像头采集到的图像示意图,当两个红外管图像所定位的靶心O’偏离摄像头中心O 时,通过单片机控制电机转动来调整摄像头角度,最终使图中O点和O’点重合,则视为瞄准成功,进而完成后续的控制激光器发射“炮弹”操作。
2 硬件设计系统的整体硬件由两部分组成,其中电子靶部分包括用于采集信号和控制显示播报的STC12C5604AD单片机最小系统电路、电子靶面的光敏电阻和炮台的自动定位引导装置、比较器电路、数码显示模块、SD语音模块、音频功放电路;炮台部分由MCF52255单片机系统电路、电机驱动、摇杆及其AD转换电路以及OV7620摄像头及其控制电路等几个模块组成[3-5]。
为方便系统制作,语音模块和摄像头模块采用购买的已集成好的电路。
如前面图4的炮台系统总体结构所示,其中STC12C5604AD芯片为辅助单片机,使用其片内集成的8位AD采集摇杆电位信号,并判断手动发炮按键是否按下。
Coldfire系列的MCF52255单片机为核心单片机,它作为整个炮台部分的总处理器,用来处理图像、驱动减速电机以实现激光炮瞄准和执行射击操作。
2.1 电子靶整体硬件电路设计如图1所示,当某一靶环上有激光照射时,该环上光敏电阻传感器两端的电压信号会发生变化,与之相接的LM393比较器电路的输出电平也随之改变,使用一片STC12C5604AD的I/O端口检测比较器的输出信号并判断出击中的环数后,将所得环数信息传给另一片STC12C5604AD,由其通过串行通信控制SD语音模块进行相应的环数播报,并使用一组8位I/O端口控制74LS47译码器电路从而通过共阳极数码管显示环数及总环数,根据题目要求最多显示两位数即可。
两片单片机之间通过芯片自带的串行通信端口实现通信。
2.2 电机控制部分电路减速电机的驱动电路如图6所示。
BTS7960B为半桥驱动芯片,电机接在其OUT1和OUT2两端;74ALS244芯片为单片机和驱动芯片之间提供缓冲。
EN为驱动使能信号;ERO1和ERO2用于对两个芯片进行电流检测;输入控制信号IN1、IN2中一个是占空比可调的PWM波,另一个保持低电平,可以灵活改变电机转动方向和电机转速。
2.3 音频功放电路由于语音模块本身的输出非常微弱,本文采用音频功放电路作为SD语音模块的后级电路,可以将声音信号进行有效地放大。
本系统使用TI公司生产的OPA2134芯片作为前级运放,用于将语音模块音频输出的电压进行放大。
再将放大后的信号传给由音频功放芯片LM4890构成的次级电路,其输出送入扬声器,完成语音播报。
电路原理图如图7所示。
通过调节图7中的滑动变阻器R6,可以改变运放的放大倍数。
此外,由于本系统中OPA2134芯片为单电源供电,故使用电阻R2~R5为两个输入端提供2.5?V的虚拟地以防止信号失真。
为了滤除由于虚拟地的存在而产生的直流成分,在LM4890功放电路输入端加上电容C1以起到隔直通交的作用。
3 软件设计3.1 电子靶软件设计电子靶的软件设计分为靶面被击中环数的识别程序和播报显示环数功能的控制程序两部分,分别由一片STC单片机控制实现。
靶环区七组光敏电阻连接的比较器电路构成一组七位的返回值,使用前级单片机STC12C5604AD(1)的七个I/O管脚读取该值并与无激光照射下的返回值进行逐位比较,从而判断哪一环被击中。
若有两环同时被激光照射,则选取数值较大的一环。
前级单片机还计算出击中的总环数,并将环数信号通过串行通信传给后级单片机STC12C5604AD(2)。
其软件流程图如图8(a)所示。
后级单片机在接收到环数和总环数后,计算出环数的个位、十位,将其转换成相应的十六进制数字通过I/O管脚输出,控制数码显示,同时使用串行通信端口控制语音模块播报。
图8(b)为后级单片机的软件流程图。
需要注意的是,在前级单片机发出环数信号供后级选中一段音频后,要经过足够的延时待其播放完毕,前级才能继续发送下一环数信号。
使用SD语音模块时,将音频文件按照特定的编号形式命名并以MP3格式存储在SD卡中,通过输入文件名即可播放相应的语音。
本系统根据设计需要,将数字“0”~“10”、“总”、“环”、“数”和击中提示音的MP3文件存入SD卡,播报时只需以此选择与十位、个位数字对应的音频文件,再根据情况判断是否需要播报击中提示音和“总环数”即可。
3.2 炮台软件设计手动瞄准时,通过辅助单片机的AD中断功能完成对摇杆电压信号进行模数转换。
将转换得到的反映横竖两方向运动状态的两组数字信号按照一定算法组合成一个8位的二进制数据,并送入MCF52255单片机进行分析,进而控制电机的驱动。
发射按键则是通过一个输入的I/O管脚对其进行循环查询。
摇杆做前后、左右转动时,炮台分别做竖直、水平运动。
在自动瞄准情况下,由于红外透镜的滤光作用,外界环境的彩色图像被摄像头采回后变为具有不同灰度的图像,这就大大简化了图像返回值的复杂程度。
由于其中有用的信息仅为红外发光管对应的像素点,通过SCCB总线协议对摄像头的控制寄存器进行设置,改变其曝光时间,可以使采集图像中除红外发光管区域外其它全为黑色。
将各个像素点与预先设定好的阈值比较,使得黑色区域的返回值为0xFF,白色区域(红外发光管区域)的返回值为0x00。
设定相应的算法,便可以根据两个0x00区域的位置确定靶心位置,进而控制电机带动摄像头瞄准靶心。
炮台程序的流程图如图9所示。
4 实验测试对本系统进行测试,可以得到如下结果。
(1)在距离2~3?m位置时,手动打靶受人为瞄准因素影响较大,10次打靶中1次击中10环,4次击中9环,5次击中八环。
同样距离范围内,10次自动打靶,其中2次击中10环,8次击中9环。
可见,本文设计的模拟打靶系统具有很高的打靶精度。
(2)炮台可在水平方向上与靶面中垂线成-90~90?°夹角的范围内自动搜索电子靶并瞄准,且能执行相应的发出提示音、射击以及示意完成等操作。
电子靶可正确地显示打靶环数及总环数。
系统完成搜索、瞄准、延迟、射击、显示、播报等功能所需的时间均不超过60?s。
(3)移动固定电子靶的三脚架,可以在0~1?m范围内任意设置靶心与炮台的竖直距离。
实际结果表明,本系统可以成功搜索到不同相对高度的靶心。
5 结语本文通过结合光传感器和摄像头设计了炮台打靶模拟系统,能够快速瞄准电子靶并实现打靶功能,自动打靶精度在9环以上,具有较高的可靠性和稳定性。