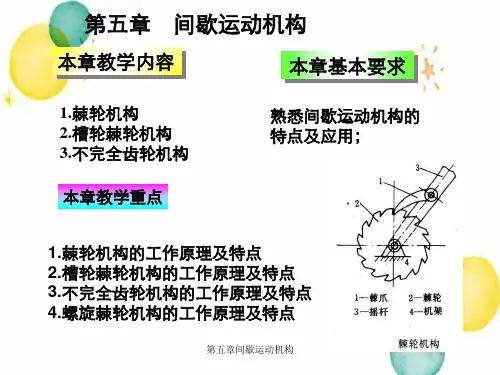
第五章 获得往复运动的机构
- 格式:ppt
- 大小:19.76 MB
- 文档页数:48
第五章常用机构学案本章重点一、掌握曲柄摇杆机构、双曲柄机构双摇杆机构的组成条件二、掌握四杆机构中急回特性内容和死点位置判断等运动特性三、掌握四杆机构的演化形式及应用;四、熟悉凸轮机构的组成、分类及用用特点;五、了解凸轮机构各主要参数和对机构性能影响和常用从动杆运动规律;熟悉经轮机构和槽轮机构的组成及典型应用。
本章内容提要一、平面连杆机构平面连杆机构:各构件是用销轴、滑道等方式连接起来的,各构件间的相对运动均在同一平面或相互平行的平面内。
平面四杆机构:有四个杆件组成的最简单的平面连杆机构称为平面四杆机构。
铰链四杆机构:由四个杆件通过转动铰链连接而成的机构。
1.运动副=低副+高副2. 低副:面接触高副:点、线接触(一)铰链四杆机构的组成铰链四杆机构由机架、连接杆、连杆组成。
(二)铰链四杆机构的组成条件1.曲柄摇杆机构(1)最长杆和最短杆长度之和小于或等于其余两杆长度之和;(2)以最短杆的相邻杆为机架。
凡符合上述以上两条要求的四杆机构为曲柄摇杆机构2.双曲柄机构(1)最长杆和最短杆长度之和小于或等于其余两杆长度之和;(2)以最短杆为机架。
凡符合上述以上两条要求的四杆机构为双曲柄机构。
3.双摇杆机构(1)最长杆和最短杆长度之和小于或等于其余两杆长度之和,以最短杆的相对杆为机架;(2)最长杆和最短杆长度之和大于其余两杆长度之和。
凡符合上述任意一条要求的四杆机构为双摇杆机构。
4.急回特性:曲柄与连杆两次共线位置之间所夹的锐角θ称为极位夹角.摇杆的返度较快,称它具有“急回运动”特性。
当有曲柄存在时,急位夹角越大,急回特性越强;急位夹角为0就不存在急回特性。
急回运动特性有利于提高机械的工作效率。
机械在工作中往往具有工作行程和空回行程两个过程,可以利用急回运动特性来缩短机械空回行程的时间。
5. 死点:曲柄摇杆机构中,设摇杆为主动件,曲柄为从动件,当机构处于连杆与曲柄在一条直线上。
这时主动件通过连杆作用于从动件上的力恰好通过其回转中心,此力对旋转中心不产生力矩。