一种拥挤环境下的多目标跟踪算法
- 格式:pdf
- 大小:821.15 KB
- 文档页数:4
《复杂背景中的多目标检测与跟踪》篇一一、引言随着人工智能和计算机视觉技术的快速发展,多目标检测与跟踪在复杂背景下的应用变得尤为重要。
本文将探讨在各种复杂环境中如何有效地实现多目标检测与跟踪的技术方法和研究进展,包括面临的挑战和潜在的应用前景。
二、复杂背景下的多目标检测与跟踪概述多目标检测与跟踪在现实生活中有着广泛的应用,如视频监控、自动驾驶、机器人视觉等。
在复杂背景下,由于场景中目标的多样性和环境的动态性,实现高精度的多目标检测与跟踪是一个极具挑战性的任务。
其主要目的是对场景中的多个目标进行准确的定位、识别和追踪。
三、关键技术与方法在复杂背景下实现多目标检测与跟踪,需要运用一系列先进的技术和方法。
首先,利用深度学习技术,通过训练大量的数据集,使得模型能够自动学习和提取目标的特征信息。
其次,采用目标检测算法,如基于区域的方法和基于回归的方法,对场景中的目标进行准确的定位和识别。
此外,还需要运用多目标跟踪算法,如基于滤波的方法和基于学习的方法,对多个目标进行连续的跟踪和轨迹预测。
四、挑战与解决方案在实现多目标检测与跟踪的过程中,面临着诸多挑战。
首先,由于复杂背景的干扰,如光照变化、阴影、遮挡等,容易导致目标误检和漏检。
针对这一问题,可以通过改进算法的鲁棒性,提高模型对复杂背景的适应能力。
其次,当多个目标相互靠近或重叠时,容易导致目标之间的混淆和跟踪丢失。
为了解决这一问题,可以采用数据关联技术,通过分析目标的特征信息,对不同目标进行准确的区分和匹配。
五、研究进展与实例分析近年来,多目标检测与跟踪技术在研究领域取得了显著的进展。
例如,基于深度学习的目标检测算法在精度和速度上都有了显著的提升。
同时,多目标跟踪算法也在不断优化和改进,如基于全局优化的轨迹预测算法和基于多特征融合的跟踪算法等。
这些技术的进步为多目标检测与跟踪在复杂背景下的应用提供了有力的支持。
以视频监控为例,通过运用多目标检测与跟踪技术,可以实现对场景中多个目标的实时监测和追踪。
多目标跟踪算法及实现研究一、本文概述Overview of this article随着计算机视觉技术的快速发展,多目标跟踪算法已成为该领域的研究热点之一。
多目标跟踪旨在从视频序列中识别并持续跟踪多个目标对象,是许多实际应用如智能监控、人机交互、自动驾驶等不可或缺的关键技术。
本文旨在深入研究和探讨多目标跟踪算法的原理、发展现状以及实际应用。
With the rapid development of computer vision technology, multi-objective tracking algorithms have become one of the research hotspots in this field. Multi object tracking aims to identify and continuously track multiple target objects from video sequences, and is an indispensable key technology in many practical applications such as intelligent monitoring, human-computer interaction, and autonomous driving. This article aims to conduct in-depth research and exploration on the principles, current development status, and practical applications of multi-objective tracking algorithms.本文将对多目标跟踪算法的基本框架和关键技术进行概述,包括目标检测、数据关联、轨迹预测等核心组件。
文章将重点介绍当前主流的多目标跟踪算法,如基于滤波的方法、基于深度学习的方法等,并分析它们的优缺点和适用场景。
多目标追踪算法多目标追踪是计算机视觉中的一个重要研究领域,其目标是利用视频流中的信息,对其中的多个目标进行实时的跟踪和定位。
多目标追踪算法的研究有助于实现一些实际应用,如视频监控、人体行为分析等。
常见的多目标追踪算法可以分为两类:基于外观特征和基于运动特征。
基于外观特征的算法使用目标的外观信息(如颜色、纹理等)来进行跟踪。
这种方法的优点是对目标形状和尺寸的变化较为鲁棒,但对于目标之间外观相似或遮挡情况下的区分较为困难。
基于运动特征的算法则利用目标在视频帧中的运动信息进行跟踪。
这种方法对目标之间的外观相似问题较为鲁棒,但对目标形状和尺寸的变化比较敏感。
一种常见的多目标追踪算法是卡尔曼滤波器。
卡尔曼滤波器通过建立目标运动模型和观测模型,并利用观测信息进行目标状态估计和预测。
该算法最初用于航空航天领域,其优点是速度快、精度高,适用于目标运动模型线性且噪声满足高斯分布的情况。
另一种常见的多目标追踪算法是粒子滤波器。
粒子滤波器利用一组粒子来表示目标的位置状态,通过不断更新和重采样来准确估计目标位置。
粒子滤波器对目标的形状和尺寸变化比较敏感,适用于非线性运动模型和非高斯噪声的情况。
目前,多目标追踪算法的研究重点主要集中在提高目标跟踪的准确性和实时性。
一种常见的解决方法是结合多个特征进行目标跟踪,如外观特征、运动特征、深度特征等。
利用多个特征可以提高目标的鉴别度,提高跟踪的准确性。
此外,还可以使用多种滤波器进行目标跟踪,如卡尔曼滤波器、粒子滤波器等,将它们进行融合,提高跟踪的实时性。
在未来,多目标追踪算法还有许多值得研究的方向。
例如,如何提高目标跟踪算法对于目标尺寸和形状变化的适应能力,如何对目标目标之间的关系进行建模,如何提高算法的鲁棒性等。
这些问题的解决将进一步推动多目标追踪算法的发展,并有助于解决实际应用中面临的挑战。
多⽬标跟踪算法——SORT1 前⾔跟踪是很多视觉系统中的⼀个核⼼模块,有很多算法都需要使⽤到跟踪的信息。
⽐如在基于视频的⾏为识别,我们就需要获得视频中每个个体的⾏为⽚段。
在我们项⽬的pipeline中,跟踪采⽤的是DeepSORT算法,⽽DeepSORT的基础是SORT算法,所以本⽂主要先介绍SORT 算法,后⾯另开⼀篇介绍DeepSORT算法。
2 SORT2.1 SORT是什么SORT是论⽂《Simple Online and Realtime Tracking》的缩写,它是⼀个解决多⽬标跟踪(Multiple Object Tracking: MOT)问题的算法,该算法基于“tracking-by-detection”框架,且是⼀个在线跟踪器(Online Tracker)。
⽽所谓Online Tracker,就是跟踪器只能利⽤当前和之前帧的检测结果去实现跟踪算法。
SORT算法在设计时的建模有以下特点:不考虑遮挡,⽆论是短时的还是长时的未使⽤外观特征(appearance feature),在运动估计和数据关联时只利⽤了检测框的位置(postiion)和⼤⼩(size)没有过多考虑跟踪中的⼀些corner case以及检测错误,因此算法对detection error的鲁棒性可能不是那么好,或者说跟踪效果的好坏很⼤程度上受到检测的影响2.2 SORT原理SORT算法主要包括4个模块:1)检测模块;2)运动估计模块;3)数据关联模块;4)被跟踪物体的建⽴与销毁模块。
检测模块其中检测模块采⽤的是Faster RCNN,这个在实际项⽬中可以被其它检测算法替换,⽐如我们项⽬中使⽤的就是YOLO算法。
运动估计模块每个物体的状态定义为\mathbf{x}=[u, v, s, r, \dot{u}, \dot{v}, \dot{s}]^{T}。
假如当前帧检测出3个物体,运动估计模块利⽤Kalman Filter,得到下⼀帧(或下⼏帧)这3个物体的状态。
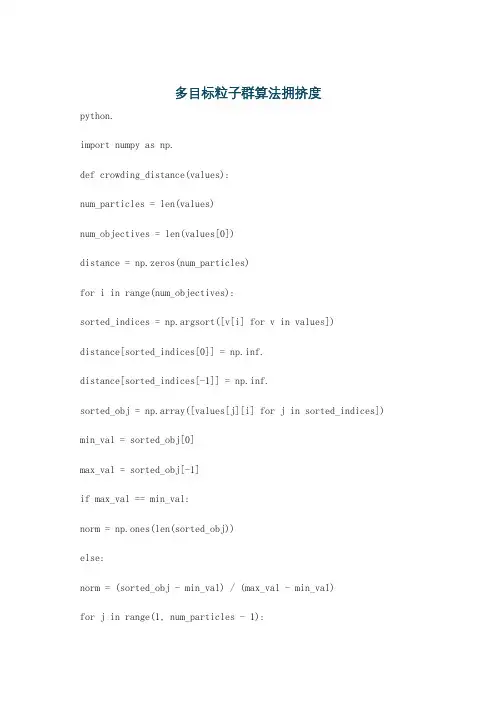
多目标粒子群算法拥挤度python.import numpy as np.def crowding_distance(values):num_particles = len(values)num_objectives = len(values[0])distance = np.zeros(num_particles)for i in range(num_objectives):sorted_indices = np.argsort([v[i] for v in values])distance[sorted_indices[0]] = np.inf.distance[sorted_indices[-1]] = np.inf.sorted_obj = np.array([values[j][i] for j in sorted_indices]) min_val = sorted_obj[0]max_val = sorted_obj[-1]if max_val == min_val:norm = np.ones(len(sorted_obj))else:norm = (sorted_obj - min_val) / (max_val - min_val)for j in range(1, num_particles - 1):distance[sorted_indices[j]] += norm[j + 1] - norm[j - 1]return distance.在这个代码中:1. 确定粒子的数量 `num_particles` 和目标的数量 `num_objectives`。
2. 对于每个目标:- 对粒子按照该目标的值进行排序(`argsort`)。
- 将排序后的第一个和最后一个粒子的拥挤度设为无穷大(因为它们是边界粒子,在边界上拥挤度最大)。
- 对中间的粒子,计算其在该目标上的拥挤度贡献,通过计算相邻粒子的归一化值的差并累加。
基于拥挤距离的动态粒子群多目标优化算法魏武;郭燕【期刊名称】《计算机工程与设计》【年(卷),期】2011(32)4【摘要】An improved dynamic particle swarm algorithm for multi-objective optimization based on crowding distance is proposed.To explore the global space more efficiently, the inertia weight and acceleration coefficients are dynamically changed.Meanwhile, the crowding distance sorting is used to maintain the external elitist archive and select the global social leaders.To keep the diversity of the non-dominated solutions, the mutation operator mechanism is adopted, and the probability of mutation is selected according to the size of the population.At last, the algorithm is applied to five classical test functions and compared to other algorithms.It is shown from the results that the Pareto solution obtained from this strategy has a good convergence and diversity.%提出了一种改进的基于拥挤距离的动态粒子群多目标优化算法.为提高粒子的全局搜索能力,提出了新的动态变化惯性权重和加速因子的方法.引进了拥挤距离排序方法维护外部精英集和更新全局最优值.为保持非劣解的多样性,采用了小概率变异机制,并根据种群的大小选择不同的变异概率.最后,把算法应用到5个典型的多目标测试函数并与其他算法进行比较.实验结果表明,该算法所得的Pareto解集有很好的收敛性和多样性.【总页数】5页(P1422-1425,1452)【作者】魏武;郭燕【作者单位】华南理工大学,自动化科学与工程学院,广东,广州,510640;华南理工大学,自动化科学与工程学院,广东,广州,510640【正文语种】中文【中图分类】TP301.6【相关文献】1.基于拥挤距离排序的多目标粒子群优化算法及其应用 [J], 李中凯;谭建荣;冯毅雄;方辉2.基于动态拥挤距离的混合多目标免疫优化算法 [J], 马元锋;李昂儒;余慧敏;潘晓英3.基于拥挤距离排序多变异多目标粒子群优化的轨迹规划 [J], 谢一鸣;王琳;;4.基于自适应网络与动态拥挤距离的多目标粒子群算法及应用 [J], 丁晓霖;侍洪波5.基于动态聚集距离的多目标粒子群优化算法及其应用 [J], 刘丽琴;张学良;谢黎明;李明磊;温淑花;卢青波因版权原因,仅展示原文概要,查看原文内容请购买。
《交通场景下的车辆行人多目标检测与跟踪算法研究》篇一一、引言在现代化交通系统中,对于车辆行人多目标检测与跟踪的准确性以及效率,正变得愈发重要。
对于实现自动驾驶、交通流量分析以及事故预防等应用,多目标检测与跟踪技术发挥着至关重要的作用。
本文将深入探讨交通场景下的车辆行人多目标检测与跟踪算法的研究现状、方法和应用。
二、多目标检测与跟踪的背景和意义在复杂的交通场景中,对车辆和行人多目标进行检测和跟踪是计算机视觉领域的重要研究方向。
这种技术能够实时获取交通场景中的动态信息,为自动驾驶、智能交通系统等提供关键数据支持。
同时,通过多目标检测与跟踪技术,我们可以更好地理解交通流动态,预测可能的交通状况,以实现事故预防和交通优化。
三、多目标检测与跟踪算法研究现状目前,多目标检测与跟踪算法主要包括基于深度学习和传统计算机视觉的方法。
其中,基于深度学习的方法在处理复杂交通场景时表现出色。
例如,卷积神经网络(CNN)在特征提取和目标识别方面具有强大的能力,而循环神经网络(RNN)和长短期记忆网络(LSTM)等在序列数据处理中具有优势,可实现目标的持续跟踪。
四、车辆行人多目标检测算法研究车辆行人多目标检测是利用图像处理技术从交通场景中提取出车辆和行人等目标信息的过程。
常见的检测算法包括基于区域的方法、基于特征的方法以及基于深度学习的方法。
其中,基于深度学习的目标检测算法如Faster R-CNN、YOLO等在准确性和实时性方面表现出色。
这些算法能够自动学习目标的特征表示,从而实现对复杂交通场景中车辆和行人的准确检测。
五、车辆行人多目标跟踪算法研究多目标跟踪是在检测到目标的基础上,通过关联分析等方法实现对多个目标的持续跟踪。
常见的多目标跟踪算法包括基于滤波的方法、基于匹配的方法以及基于深度学习的方法。
其中,基于深度学习的方法通过学习目标的时空特征,实现更准确的跟踪。
同时,利用神经网络模型如Siamese网络等可以实现高效的在线学习和跟踪。
《交通场景下的车辆行人多目标检测与跟踪算法研究》篇一一、引言随着智能交通系统的快速发展,交通场景下的车辆行人多目标检测与跟踪技术成为了研究热点。
该技术能够有效地对交通场景中的车辆和行人进行实时检测和跟踪,为自动驾驶、智能交通管理等领域提供重要支持。
本文旨在研究交通场景下的车辆行人多目标检测与跟踪算法,为相关领域的研究和应用提供参考。
二、研究背景与意义在复杂的交通场景中,车辆和行人的多目标检测与跟踪是智能交通系统的关键技术之一。
通过对车辆和行人的实时检测和跟踪,可以有效地提高道路交通安全、缓解交通拥堵、优化交通管理等方面的问题。
因此,研究交通场景下的车辆行人多目标检测与跟踪算法具有重要的理论价值和实际应用意义。
三、相关技术综述3.1 目标检测技术目标检测是计算机视觉领域的重要研究方向,主要包括基于传统计算机视觉方法和基于深度学习的方法。
传统方法主要依靠特征提取和分类器进行目标检测,而深度学习方法则通过神经网络自动学习目标的特征,实现更高的检测精度。
3.2 多目标跟踪技术多目标跟踪是指对多个目标进行实时跟踪的技术。
常用的多目标跟踪方法包括基于滤波的方法、基于聚类的方法和基于深度学习的方法等。
其中,基于深度学习的方法在复杂场景下的多目标跟踪中具有较好的性能。
四、车辆行人多目标检测与跟踪算法研究4.1 算法原理本文研究的车辆行人多目标检测与跟踪算法主要基于深度学习方法。
首先,通过卷积神经网络对交通场景中的车辆和行人进行特征提取和分类,实现目标的检测。
然后,利用多目标跟踪算法对检测到的目标进行实时跟踪,实现多目标的关联和轨迹预测。
4.2 算法实现在实现过程中,首先需要构建合适的卷积神经网络模型,对交通场景中的车辆和行人进行特征提取和分类。
其次,需要设计多目标跟踪算法,对检测到的目标进行实时跟踪和关联。
在实现过程中,需要考虑算法的实时性、准确性和鲁棒性等方面的问题。
4.3 实验结果与分析通过在公共数据集和实际交通场景中的实验,验证了本文研究的车辆行人多目标检测与跟踪算法的有效性和优越性。
第 38 卷第 8 期2023 年 8 月Vol.38 No.8Aug. 2023液晶与显示Chinese Journal of Liquid Crystals and Displays复杂环境下基于改进DeepSORT的行人实时稳定跟踪方法张丽娟1,2,张紫薇2,姜雨彤3*,李东明1,4,胡梦达2,刘英雪2(1.无锡学院物联网工程学院,江苏无锡 214105;2.长春工业大学计算机科学与工程学院,吉林长春 130012;3.中国北方车辆研究所,北京 100072;4.吉林农业大学信息技术学院,吉林长春 130118)摘要:实时多目标跟踪算法取得了理想的跟踪性能,但大多数现有算法的跟踪速度较慢,且随着背景复杂度的增加,跟踪精度也随之降低。
针对此问题,本文提出了基于在线数据关联的行人实时跟踪算法。
首先,设计了核相关滤波和卡尔曼滤波双轨道预测机制,配合DeepSORT中的级联匹配形成了预测-跟踪-校准体系,使数据关联更加可靠。
此外,在目标检测部分引入了注意力机制,通过强化目标对象的位置信息增强特征表示能力,从而提升跟踪的精度。
该模型在MOT16数据集上的MOTA达到了66.5%、IDF1达到了64.2%、IDSW达到了641。
与DeepSORT算法对比,MOTA 和IDF1分别提升了13%和13.2%,IDSW下降了410。
本文算法有助于解决行人实时跟踪时出现的目标误检、漏检等问题,在跟踪中对严重遮挡情况仍保持了较高的跟踪精度,在复杂环境下可以实现行人实时稳定跟踪。
关键词:多目标跟踪;实时跟踪;YOLOv5;核相关滤波算法;DeepSORT中图分类号:TP391 文献标识码:A doi:10.37188/CJLCD.2022-0350Stable and real-time pedestrian tracking method based on improved DeepSORT under complex backgroundZHANG Li-juan1,2,ZHANG Zi-wei2,JIANG Yu-tong3*,LI Dong-ming1,4,HU Meng-da2,LIU Ying-xue2(1.School of Internet of Things Engineering, Wuxi University, Wuxi 214105, China;2.College of Computer Science and Engineering, Changchun University of Technology,Changchun 130012, China;3.China North Vehicle Research Institute, Beijing 100072, China;4.School of Information Technology, Jilin Agricultural University, Changchun 130118, China)Abstract: The real-time multiple object tracking algorithms have achieved ideal tracking performance, but 文章编号:1007-2780(2023)08-1128-11收稿日期:2022-10-22;修订日期:2023-11-13.基金项目:吉林省生态环境厅科研项目(吉环科字第2021-07号);吉林省科技发展计划重点研发项目(No.20210204050YY);无锡学院引进人才科研启动专项经费(No.2023r004, 2023r006)Support by Scientific Research Project of Jilin Provincial Department of Ecological Environment (No.2021-07); Key R&D Projects of Jilin Provincial Science and Technology Development Plan (No.20210204050YY);Wuxi University Research Start-up Fund for Introduced Talents(No.2023r004, 2023r006)*通信联系人,E-mail:jiangyutong201@第 8 期张丽娟,等:复杂环境下基于改进DeepSORT的行人实时稳定跟踪方法the tracking speed is slow,and tracking accuracy is also decreased with the increase of background complexity in most of the recent algorithms. In terms of these issues, a real-time multiple pedestrian tracking algorithm is proposed based on online data association.First of all,the dual prediction mechanism of kernelized correlation filter and Kalman filter is designed.This mechanism forms a prediction tracking calibration system with the cascade matching in DeepSORT, which makes the data correlation more reliable. In addition, the attention mechanism is introduced in the object detection part of tracking to enhance feature representation ability by strengthening position information of the object, so as to improve racking accuracy. The experiment is carried out on MOT16 dataset,the MOTA is up to 66.5%,IDF1 is up to 64.2,IDSW is pared with DeepSORT algorithm,MOTA and IDF1 increase 13% and 13.2% respectively, and IDSW decreases 410.Experimental results show that the proposed algorithm is helpful to solve the problem of object false detection,missing detection and other problems in multiple pedestrian real-time tracking.It still maintains high tracking accuracy for severe occlusion in tracking,which can achieve real-time and stable multiple pedestrian tracking in complex background.Key words: multiple object tracking; online tracking; YOLOv5; kernelized correlation filters; DeepSORT1 引言多目标跟踪(Multiple Object Tracking, MOT)是指输入一段视频,在没有任何对目标的先验知识(外形或数量)的前提下,追踪其中一类或多类物体的运动轨迹。
《复杂背景中的多目标检测与跟踪》篇一一、引言在当今的计算机视觉领域,多目标检测与跟踪技术已成为一项重要的研究课题。
随着人工智能和计算机技术的飞速发展,多目标检测与跟踪技术在智能监控、无人驾驶、智能交通等领域得到了广泛应用。
然而,在复杂背景环境下进行多目标检测与跟踪,面临着许多挑战。
本文将深入探讨该技术在复杂背景环境中的应用及其相关问题。
二、复杂背景中的多目标检测2.1 检测挑战在复杂背景环境下,多目标检测面临诸多挑战。
首先,背景中的干扰因素众多,如光线变化、阴影、遮挡等,这些都可能影响目标的准确检测。
其次,多个目标之间的相互遮挡和交叉移动也会增加检测难度。
此外,实时性和准确性是检测过程中的重要指标,如何在保证准确性的同时提高检测速度,是当前研究的重点。
2.2 解决方法针对上述挑战,学者们提出了多种解决方法。
首先,利用深度学习技术,通过训练大量的数据集来提高模型的识别能力。
例如,通过卷积神经网络(CNN)提取图像中的特征信息,从而提高目标的检测准确率。
其次,采用目标检测算法来优化多目标同时出现时的处理策略。
例如,基于区域的方法和基于回归的方法在目标检测中各有优势,可以通过结合两种方法以提高整体性能。
三、多目标跟踪技术3.1 跟踪原理多目标跟踪技术主要通过利用图像序列中的时空信息来实现对多个目标的连续跟踪。
在复杂背景下,多目标跟踪需要综合考虑目标的外观、运动轨迹等因素。
目前,基于深度学习的多目标跟踪方法已经成为主流。
通过训练深度神经网络来提取目标的特征信息,再利用这些信息实现目标的连续跟踪。
3.2 关键技术在多目标跟踪过程中,关键技术包括目标关联、轨迹预测和状态估计等。
目标关联是指将连续帧中的目标进行匹配和关联;轨迹预测则是根据目标的运动轨迹预测其未来位置;状态估计是基于观测数据对目标状态进行估计和更新。
这些关键技术的有效结合可以提高多目标跟踪的准确性和实时性。
四、多目标检测与跟踪的融合4.1 融合策略为了实现复杂背景下的多目标检测与跟踪,需要将两者进行有效融合。
nsga2算法求解多目标优化原理下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!NSGA2算法求解多目标优化原理在工程问题中,经常会出现多个相互矛盾的优化目标,这就需要采用多目标优化方法来求解。
视频监控系统的识别和跟踪算法的研究随着技术的不断发展,视频监控系统的应用越来越广泛,从公共场所到家庭安防,已经成为我们生活中不可或缺的一部分。
在许多情况下,监控系统不仅需要实时监控,更需要能够识别和跟踪目标,才能发挥最大的作用。
本文将介绍一些视频监控系统中常用的目标识别和跟踪算法,并探讨它们的优缺点和适用场景。
一、目标识别算法1. 基于背景差分的目标检测算法这种算法是最常见的一种,主要是通过人工设定一个背景模型,当检测到视频中的图像与该模型存在差异时,便认为是有目标出现。
该算法简单易懂,而且在背景稳定的场景中效果很好。
但是当背景不稳定,比如有很多动态的物体时,这种算法的效果就会降低。
2. 基于特征提取的目标检测算法这种算法是通过在图像中提取一些具有代表性的特征,再通过分类器将目标与其他物体区分开来。
常用的特征包括色彩、形状、纹理等等。
该算法的优点是对场景的要求不高,可以应对一些比较复杂的场景。
但是由于对特征的提取和分类有一定的要求,需要较大的计算量,因此效率较低。
3. 基于深度学习的目标检测算法近年来,深度学习技术得到了广泛的应用,其中最具代表性的就是卷积神经网络(CNN)。
CNN可以自动提取图像特征,再通过分类器对目标进行识别。
这种算法的优点是准确率很高,可以应对非常复杂的场景。
但是由于需要大量训练数据和计算资源,因此对硬件的要求比较高。
二、目标跟踪算法1. 单目标跟踪算法这种算法主要是通过目标的运动信息来进行跟踪,常用的方法有基于颜色直方图的跟踪算法、基于卡尔曼滤波的跟踪算法等等。
其中基于颜色直方图的算法适用于场景比较简单的情况,而基于卡尔曼滤波的算法可以对目标的运动进行预测,效果比较好。
2. 多目标跟踪算法多目标跟踪相比于单目标跟踪更加复杂。
常用的算法有基于轨迹的跟踪算法、基于区域的跟踪算法等等。
其中基于轨迹的算法可以通过对目标运动轨迹的分析,来预测目标的下一步移动方向,进而进行跟踪。
而基于区域的算法则是通过将图像分割成多个区域,再对每个区域进行跟踪,从而提高跟踪的准确率。
nsga2拥挤度计算公式
拥挤度计算公式是用于评估多目标优化算法中个体之间的拥挤度的一种方法。
NSGA-II(Non-dominated Sorting Genetic Algorithm-II)是一种常用的多目标优化算法,而拥挤度计算公式也被广泛应用于NSGA-II算法中。
在NSGA-II算法中,拥挤度计算公式的作用是为了维持种群的多样性。
它通过衡量个体在目标空间中的分布密度来评估拥挤度。
具体而言,拥挤度计算公式考虑了个体在每个目标维度的值与其邻居个体之间的距离。
常用的拥挤度计算公式如下:
拥挤度 = (距离目标1最近的个体距离 + 距离目标2最近的个体距离 + ... + 距离目标n最近的个体距离)
其中,目标1、目标2、...、目标n是多目标优化问题中的各个目标维度。
距离目标d最近的个体距离可以通过计算个体在目标d维度上的相邻个体距离来得到。
这个距离可以通过欧氏距离、曼哈顿距离等算法来计算。
通过计算每个个体的拥挤度,可以帮助NSGA-II算法优选出具有较好多样性的解集。
较高的拥挤度值表示个体在目标空间中的分布较为均匀,说明该个体具有较好的多样性。
综上所述,拥挤度计算公式是用于评估多目标优化算法中个体之间拥挤度的一种方法。
它在NSGA-II算法中被广泛应用,能够维持种群的多样性,优选出具有较好多样性的解集。