小直流电机调速控制系统方案
- 格式:doc
- 大小:1.35 MB
- 文档页数:43
第一章:前言Pwm 电机调速原理对于电机的转速调整,我们是采用脉宽调制(PWM)办法,控制电机的时候,电源并非连续地向电机供电,而是在一个特定的频率下以方波脉冲的形式提供电能。
不同占空比的方波信号能对电机起到调速作用,这是因为电机实际上是一个大电感,它有阻碍输入电流和电压突变的能力,因此脉冲输入信号被平均分配到作用时间上,这样,改变在始能端EN1 和EN2 上输入方波的占空比就能改变加在电机两端的电压大小,从而改变了转速。
此电路中用微处理机来实现脉宽调制,通常的方法有两种:(1)用软件方式来实现,即通过执行软件延时循环程序交替改变端口某个二进制位输出逻辑状态来产生脉宽调制信号,设置不同的延时时间得到不同的占空比。
(2)硬件实验自动产生PWM 信号,不占用CPU 处理的时间。
这就要用到STC89C52的在PWM模式下的计数器1,具体内容可参考相关书籍。
51 单片机PWM 程序产生两个PWM,要求两个PWM 波形占空都为80/256,两个波形之间要错开,不能同时为高电平!高电平之间相差48/256,PWM 这个功能在PIC 单片机上就有,但是如果你就要用51 单片机的话,也是可以的,但是比较的麻烦.可以用定时器T0来控制频率,定时器T1 来控制占空比:大致的的编程思路是这样的:T0 定时器中断是让一个I0口输出高电平,在这个定时器T0的中断当中起动定时器T1,而这个T1 是让IO 口输出低电平,这样改变定时器T0 的初值就可以改变频率,改变定时器T1 的初值就可以改变占空比。
前言:直流电机的定义:将直流电能转换成机械能(直流电动机)或将机械能转换成直流电能(直流发电机)的旋转电机。
近年来,随着科技的进步,直流电机得到了越来越广泛的应用,直流具有优良的调速特性,调速平滑,方便,调速范围广,过载能力强,能承受频繁的冲击负载,可实现频繁的无极快速起动、制动和反转,需要满足生产过程自动化系统各种不同的特殊要求,从而对直流电机提出了较高的要求,改变电枢回路电阻调速、改变电压调速等技术已远远不能满足现代科技的要求,这是通过 PWM 方式控制直流电机调速的方法就应运而生。
直流电机开环调速系统工作原理1. 什么是直流电机?直流电机,顾名思义,就是那种靠直流电供电的电机。
就像我们日常生活中常见的玩具车、电风扇一样,这些电机在我们生活中可谓是随处可见。
它们能把电能转化为机械能,帮我们完成各种各样的工作。
而开环调速系统,听上去很高大上,但其实就是一种简单的控制方式。
它不像闭环控制那样复杂,所以咱们今天就来聊聊这个“简单明了”的开环调速系统到底是怎么工作的。
2. 开环调速系统的基本原理2.1 电机与电源的关系直流电机的运行离不开电源。
就像人需要吃饭才能有力气一样,电机也需要电源才能转动。
开环调速系统主要是通过调节电机供电电压来实现转速的变化。
简单来说,就是你把电压调高,电机转得快;调低,转得慢。
这个过程就像是给一辆车加油,油加得多,车跑得快,油加得少,车就慢吞吞的。
2.2 转速的变化转速变化的原理其实很简单。
当你给电机输入不同的电压时,电流也会随之改变。
电流越大,产生的磁场越强,电机转动得也就越快。
就像小朋友们在游乐场上玩秋千,推得越用力,秋千摆得越高,乐趣也就越多。
而电机转速的变化也能影响到它的输出功率,就像我们跑步的速度不同,消耗的体力也不一样。
3. 开环调速系统的优势与局限3.1 优势开环调速系统的最大好处就是简单易用,成本低。
对于一些不需要精确控制转速的场合,比如说风扇、玩具车,开环系统就像一位好管家,负责把电源和电机的关系打理得妥妥当当,省去不少麻烦。
而且,系统的设计也比较简单,不需要太多复杂的传感器和控制器,这样可以大大降低维护成本,简直就是一劳永逸。
3.2 局限不过,开环调速系统也有它的不足之处。
最大的局限在于它缺乏反馈机制。
想象一下,如果你的车子没有速度表,你怎么知道自己开得快还是慢?开环系统在负载变化时,无法实时调整电机的转速,可能导致转速不稳定,尤其是在负载变化较大的情况下,电机可能会出现过载或运行不平稳的情况。
这就像一场马拉松,选手们虽然都拼劲十足,但如果没有教练的实时指导,很可能会出现偏离轨道的情况。
一、总体设计概述本设计基于8051单片机为主控芯片,霍尔元件为测速元件, L298N为直流伺服电机的驱动芯片,利用 PWM调速方式控制直流电机转动的速度,同时可通过矩阵键盘控制电机的启动、加速、减速、反转、制动等操作,并由LCD显示速度的变化值。
二、直流电机调速原理根据直流电动机根据励磁方式不同,分为自励和它励两种类型,其机械特性曲线有所不同。
但是对于直流电动机的转速,总满足下式:式中U——电压;Ra——励磁绕组本身的内阻;——每极磁通(wb );Ce——电势常数;Ct——转矩常数。
由上式可知,直流电机的速度控制既可以采用电枢控制法也可以采用磁场控制法。
磁场控制法控制磁通,其控制功率虽然较小,但是低速时受到磁场和磁极饱和的限制,高速时受到换向火花和换向器结构强度的限制,而且由于励磁线圈电感较大,动态响应较差,所以在工业生产过程中常用的方法是电枢控制法。
电枢控制法在励磁电压不变的情况下,把控制电压信号加到电机的电枢上来控制电机的转速。
传统的改变电压方法是在电枢回路中串连一个电阻,通过调节电阻改变电枢电压,达到调速的目的,这种方法效率低,平滑度差,由于串联电阻上要消耗电功率,因而经济效益低,而且转速越慢,能耗越大。
随着电力电子的发展,出现了许多新的电枢电压控制法。
如:由交流电源供电,使用晶闸管整流器进行相控调压;脉宽调制(PWM)调压等。
调压调速法具有平滑度高、能耗低、精度高等优点,在工业生产中广泛使用,其中PWM应用更广泛。
脉宽调速利用一个固定的频率来控制电源的接通或断开,并通过改变一个周期内“接通”和“断开”时间的长短,即改变直流电机电枢上的电压的“占空比”来改变平均电.压的大小,从而控制电动机的转速,因此,PWM又被称为“开关驱动装置”。
如果电机始终接通电源是,电机转速最大为Vmax,占空比为D=t1/t,则电机的平均转速:Vd=Vmax*D,可见只要改变占空比D,就可以调整电机的速度。
平均转速Vd与占空比的函数曲线近似为直线。
基于STM32的直流电机PID调速系统设计一、引言直流电机调速系统是现代工业自动化系统中最常用的电机调速方式之一、它具有调速范围广、响应快、控制精度高等优点,被广泛应用于电力、机械、石化、轻工等领域。
本文将介绍基于STM32单片机的直流电机PID调速系统的设计。
二、系统设计直流电机PID调速系统主要由STM32单片机、直流电机、编码器、输入和输出接口电路等组成。
系统的设计流程如下:1.采集反馈信号设计中应通过编码器等方式采集到反馈信号,反应电机的转速。
采集到的脉冲信号经过处理后输入给STM32单片机。
2.设计PID算法PID调节器是一种经典的控制算法,由比例(P)、积分(I)和微分(D)三个部分组成,可以根据实际情况调整各个参数的大小。
PID算法的目标是根据反馈信号使电机达到期望的转速。
3.控制电机速度根据PID算法计算出的偏差值,通过调节电机的占空比,实现对电机速度的控制。
当偏差较大时,增大占空比以加速电机;当偏差较小时,减小占空比以减速电机。
4.界面设计与控制设计一个人机交互界面,通过该界面可以设置电机的期望转速以及其他参数。
通过输入接口电路将相应的信号输入给STM32单片机,实现对电机的远程控制。
5.系统保护在电机工作过程中,需要保护电机,防止出现过流、超速等问题。
设计一个保护系统,能够监测电机的工作状态,在出现异常情况时及时停止电机工作,避免损坏。
6.调试与优化对系统进行调试,通过实验和测试优化PID参数,以获得更好的控制效果。
三、系统实现系统实现时,首先需要进行硬件设计,包括STM32单片机的选型与外围电路设计,以及输入输出接口电路的设计。
根据实际情况选择合适的编码器和直流电机。
接着,编写相应的软件代码。
根据系统设计流程中所述,编写STM32单片机的控制程序,包括采集反馈信号、PID算法实现、控制电机速度等。
最后,进行系统调试与优化。
根据系统的实际情况,调试PID参数,通过实验和测试验证系统的性能,并进行优化,以实现较好的控制效果。
一概述随着电力电子器件的发展,大功率变流技术前进到一个以弱电为控制,强电为输出的新时代。
直流电机调速系统由于它在技术性能与经济指标上具有优越性,实施技术上也比较成熟,因此在冶金、机械、矿山、铁道、纺织、化工、造纸及发电设备等行业都得到了广泛的应用,已成为工业自动控制领域一个及其重要的组成部分。
一般工业生产中大量应用各种交直流电动机。
直流电动机有良好的调速性能,三相交流桥式全控整流是目前在各种整流电路中应用最为广泛的电力电子电路,在运用到在直流电机调速时可以采用这种电路。
三相交流桥式全空整流最初用途是传动控制,但目前应用的新领域是各种直流电源设计。
前者是三相交流桥式全控整流电路的传统领域,后者则是它当前和未来发展的新领域。
而高频、大功率、高可靠性开关电源是当今电源变换技术发展的重要方向之一。
从我国的实际情况来看很好地采用三相桥式全控整流给直流电机调速仍然有很广泛的应用市场。
这对改善我国科技现状水平,提高经济效益将起着重要作用,所以研究三相桥是全控整流直流调速系统有着深远的意义,它不仅能够大大改善各种机车的调速系统,为其提高安全、快速、低损耗的调速装置,在解决目前国际各国所面临的能源无谓的消耗起到立竿见影的效果。
二设计的总体思路2.1 直流电动机的调速方法采用改变电动机端电压调速的方法。
当额定励磁保持不变,理想空载转速n随U减小而减小,各特性线斜率不变,由此可实现额定转速以下大范围平滑调速,并且在整个调速范围内机械特性硬度不变。
变电压调速要有可调的直流电源,根据供电电源的种类分两种情况:一是采用可控变流装置,将交流电转变为可调的直流电。
二是采用直流斩波器,在具有恒定直流供电电源的地方,实现脉冲调压调速由于工矿企业中大多为交流电源,因此前一种情况应用最广。
晶闸管变流装置输出的直流脉动电压U加在电抗器L和电动d机电枢两端,L起滤波作用以及保持电流连续。
改变晶闸管触发电路的移相控制电压U,就可改变触发脉冲的控制角。
单片机原理及应用课程设计报告设计题目:学院:专业:班级:学号:学生姓名:指导教师:年月日目录设计题目 (3)1 设计要求及主要技术指标: (4)1.1 设计要求 (4)1.2 主要技术指标 (5)2 设计过程 (6)2.1 题目分析 (9)2.2 整体构思 (10)2.3 具体实现 (12)3 元件说明及相关计算 (14)3.1 元件说明 (14)3.2 相关计算 (15)4 调试过程 (16)4.1 调试过程 (16)4.2 遇到问题及解决措施 (20)5 心得体会 (21)参考文献 (22)附录一:电路原理图 (23)附录二:程序清单 (24)设计题目:PWM直流电机调速系统本文设计的PWM直流电机调速系统,主要由51单片机、电源、H桥驱动电路、LED液晶显示器、霍尔测速电路以及独立按键组成的电子产品。
电源采用78系列芯片实现+5V、+15V对电机的调速采用PWM波方式,PWM是脉冲宽度调制,通过51单片机改变占空比实现。
通过独立按键实现对电机的启停、调速、转向的人工控制,LED实现对测量数据(速度)的显示。
电机转速利用霍尔传感器检测输出方波,通过51单片机对1秒内的方波脉冲个数进行计数,计算出电机的速度,实现了直流电机的反馈控制。
关键词:直流电机调速;定时中断;电动机;PWM波形;LED显示器;51单片机1 设计要求及主要技术指标:基于MCS-51系列单片机AT89C52,设计一个单片机控制的直流电动机PWM 调速控制装置。
1.1 设计要求(1)在系统中扩展直流电动机控制驱动电路L298,驱动直流测速电动机。
(2)使用定时器产生可控的PWM波,通过按键改变PWM占空比,控制直流电动机的转速。
(3)设计一个4个按键的键盘。
K1:“启动/停止”。
K2:“正转/反转”。
K3:“加速”。
K4:“减速”。
(4)手动控制。
在键盘上设置两个按键----直流电动机加速和直流电动机减速键。
在手动状态下,每按一次键,电动机的转速按照约定的速率改变。

1 绪论1.1 课题的研究背景和意义直流电动机是最早出现的电动机,也是最早能实现调速的电动机。
长期以来,直流电动机一直占据着调速控制的统治地位。
由于它具有良好的线性调速特性,简单的控制性能,高的效率,优异的动态特性;尽管近年来不断受到其他电动机(如交流变频电机、步进电机等)的挑战,但到目前为止,它仍然是大多数调速控制电动机的优先选择。
近年来,直流电动机的结构和控制方式都发生了很大变化。
随着计算机进入控制领域以及新型的电力电子功率元件的不断出现,使采用全控型的开关功率元件进行脉宽调制 (PulseWidthModulation,简称PWM)控制方式已成为绝对主流。
这种控制方式很容易在单片机控制中实现,从而为直流电动机控制数字化提供了契机。
五十多年来,直流电气传动经历了重大的变革。
首先,实现了整流器件的更新换代,从50年代的使用己久的直流发电机一电动机组(简称G-M系统)及水银整流装置,到60年代的晶闸管电动机调速系统(简称V-M系统),使得变流技术产生了根本的变革。
再到脉宽调制 (PulsewidthModulation)变换器的产生,不仅在经济性和可靠性上有所提高,而且在技术性能上也显示了很大的优越性,使电气传动完成了一次大的飞跃。
另外,集成运算放大器和众多的电子模块的出现,不断促进了控制系统结构的变化。
随着计算机技术和通信技术的发展,数字信号处理器单片机应用于控制系统,控制电路己实现高集成化,小型化,高可靠性及低成本。
以上技术的应用,使系统的性能指标大幅度提高,应用范围不断扩大。
由于系统的调速精度高,调速范围广,所以,在对调速性能要求较高的场合,一般都采用直流电气传动。
技术迅速发展,走向成熟化、完善化、系统化、标准化,在可逆、宽调速、高精度的电气传动领域中一直居于垄断地位[1]。
目前,国内各大专院校、科研单位和厂家也都在开发直流数字调速装置。
姚勇涛等人提出直流电动机及系统的参数辨识的方法。
该方法依据系统或环节的输入输出特性,应用最小二乘法,即可获得系统或环节的内部参数,所获的参数具有较高的精度,方法简便易行。
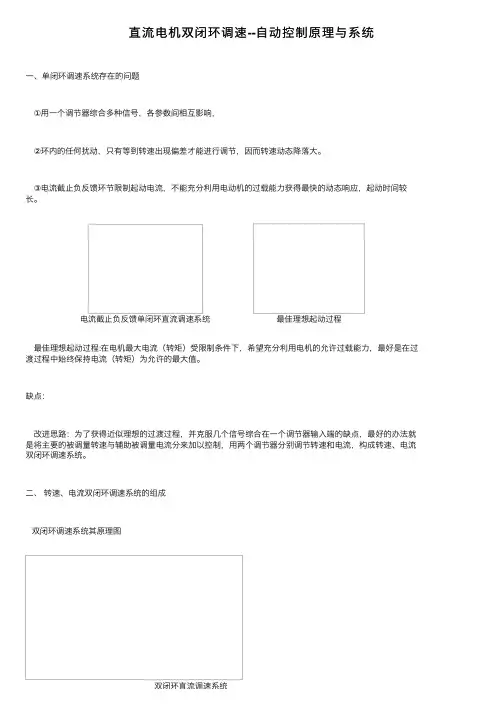
直流电机双闭环调速--⾃动控制原理与系统⼀、单闭环调速系统存在的问题①⽤⼀个调节器综合多种信号,各参数间相互影响,②环内的任何扰动,只有等到转速出现偏差才能进⾏调节,因⽽转速动态降落⼤。
③电流截⽌负反馈环节限制起动电流,不能充分利⽤电动机的过载能⼒获得最快的动态响应,起动时间较长。
电流截⽌负反馈单闭环直流调速系统最佳理想起动过程最佳理想起动过程:在电机最⼤电流(转矩)受限制条件下,希望充分利⽤电机的允许过载能⼒,最好是在过渡过程中始终保持电流(转矩)为允许的最⼤值。
缺点:改进思路:为了获得近似理想的过渡过程,并克服⼏个信号综合在⼀个调节器输⼊端的缺点,最好的办法就是将主要的被调量转速与辅助被调量电流分来加以控制,⽤两个调节器分别调节转速和电流,构成转速、电流双闭环调速系统。
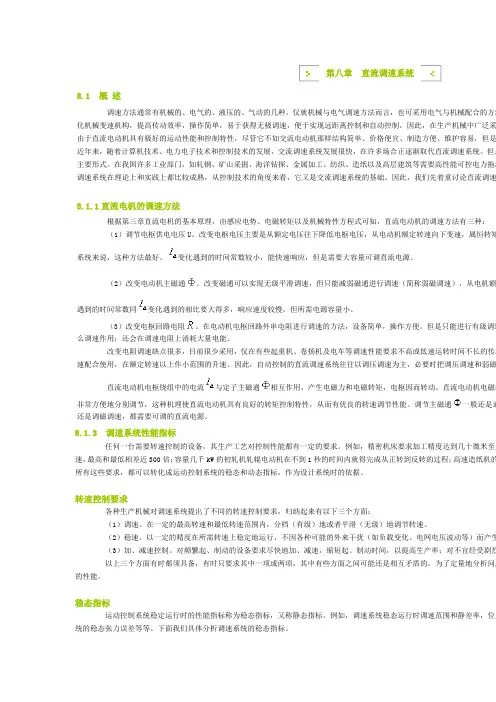
⼆、转速、电流双闭环调速系统的组成双闭环调速系统其原理图双闭环直流调速系统双闭环直流调速系统静态结构图静态结构图系统特点(1)两个调节器,⼀环嵌套⼀环;速度环是外环,电流环是内环。
(2)两个PI调节器均设置有限幅;⼀旦PI调节器限幅(即饱和),其输出量为恒值,输⼊量的变化不再影响输出,除⾮有反极性的输⼊信号使调节器退出饱和;即饱和的调节器暂时隔断了输⼊和输出间的关系,相当于使该调节器处于断开。
⽽输出未达限幅时,调节器才起调节作⽤,使输⼊偏差电压在调节过程中趋于零,⽽在稳态时为零。
(3)电流检测采⽤三相交流电流互感器;(4)电流、转速均实现⽆静差。
由于转速与电流调节器采⽤PI调节器,所以系统处于稳态时,转速和电流均为⽆静差。
转速调节器ASR输⼊⽆偏差,实现转速⽆静差。
三、双闭环调速系统的静特性双闭环系统的静特性如图所⽰特点:1)n0-A 的特点①ASR不饱和。
②ACR不饱和。
或n0为理想空载转速。
此时转速n与负载电流⽆关,完全由给定电压所决定。
电流给定有如下关系??因ASR不饱和,,故。
n0A这段静特性从⼀直延伸到。
2)A—B段①ASR饱和。
第八章直流调速系统8.1 概述调速方法通常有机械的、电气的、液压的、气动的几种,仅就机械与电气调速方法而言,也可采用电气与机械配合的方法化机械变速机构,提高传动效率,操作简单,易于获得无极调速,便于实现远距离控制和自动控制,因此,在生产机械中广泛采由于直流电动机具有极好的运动性能和控制特性,尽管它不如交流电动机那样结构简单、价格便宜、制造方便、维护容易,但是近年来,随着计算机技术、电力电子技术和控制技术的发展,交流调速系统发展很快,在许多场合正逐渐取代直流调速系统。
但是主要形式。
在我国许多工业部门,如轧钢、矿山采掘、海洋钻探、金属加工、纺织、造纸以及高层建筑等需要高性能可控电力拖动调速系统在理论上和实践上都比较成熟,从控制技术的角度来看,它又是交流调速系统的基础。
因此,我们先着重讨论直流调速8.1.1直流电机的调速方法根据第三章直流电机的基本原理,由感应电势、电磁转矩以及机械特性方程式可知,直流电动机的调速方法有三种:(1)调节电枢供电电压U。
改变电枢电压主要是从额定电压往下降低电枢电压,从电动机额定转速向下变速,属恒转矩系统来说,这种方法最好。
变化遇到的时间常数较小,能快速响应,但是需要大容量可调直流电源。
(2)改变电动机主磁通。
改变磁通可以实现无级平滑调速,但只能减弱磁通进行调速(简称弱磁调速),从电机额遇到的时间常数同变化遇到的相比要大得多,响应速度较慢,但所需电源容量小。
(3)改变电枢回路电阻。
在电动机电枢回路外串电阻进行调速的方法,设备简单,操作方便。
但是只能进行有级调速么调速作用;还会在调速电阻上消耗大量电能。
改变电阻调速缺点很多,目前很少采用,仅在有些起重机、卷扬机及电车等调速性能要求不高或低速运转时间不长的传动速配合使用,在额定转速以上作小范围的升速。
因此,自动控制的直流调速系统往往以调压调速为主,必要时把调压调速和弱磁直流电动机电枢绕组中的电流与定子主磁通相互作用,产生电磁力和电磁转矩,电枢因而转动。
直流电机调速,往往说的是他励有刷直流电机调速,根据直流电机的转速方程,转速n=(电枢电压U-电压电流Ia*内阻Ra)÷(常数Ce*气隙磁通Φ),因为电枢的内阻Ra非常小,所以电压电流Ia*内阻Ra≈0,这样转速n=(电枢电压U)÷(常数Ce*气隙磁通Φ),只要在气隙磁通Φ恒定下调整电枢电压U,就可以调整直流电机的转速n;或者在电枢电压U恒定下调整气隙磁通Φ,同样可以调整电机的转速n,前者叫恒转矩调速,后者称之为恒功率调速。
1直流电机恒转矩调速方式恒转矩模式下,要先保持气隙磁通Φ恒定,直流电机的定子和转子磁场是正交状态的,互相没有影响。
要保持Φ恒定,只要保证励磁线圈的电流稳定在一个值就可以了。
理论上给一个恒流源来控制励磁线圈的电流是比较完美的,但是因为电流源不好找,而一般给励磁线圈施加一个稳定的电压值,也可以近似让励磁电流稳定,进而让气隙磁通Φ恒定。
如果是永磁直流电机,用永磁铁来替代了励磁线圈,磁通是永久恒定的,所以不用操这个心了。
简单的调整电压,并不能满足负载波动比较厉害的场合,所以引进了串级调速系统,通过检测电机的电流和转速,分别弄出电流环内环和速度环外环了,使用PID算法,有效的满足了负载波动状况下的调速,让直流电机的调速工作特性非常“硬”,也就是最大转矩不会受到转速的波动而变化,实现了真正的恒扭矩输出。
这种调速方式,一直是交流调速系统的模仿对方,比如变频器矢量控制,就是模仿这种方式而实现的。
如果只用电流环内环,还可以直接控制电机输出一定的扭矩,满足不同的拉伸和卷曲等控制要求。
电枢电压控制,在晶闸管和IGBT这些没有被发明前,控制起来也不是容易的事情了,毕竟功率比较大,早期是通过一台发电机直流发电来控制的,通过调整发电机的磁通就可以控制发电机的输出电压,进而调整了电枢电压大小的。
在晶闸管可控硅被发明出来以后,通过给可控硅施加交流输入电压,利用移相触发技术控制可控硅的导通角,就可以把交流电整流成一定脉动的直流电,因为直流电机是大感性负载,脉动直流电会被大电感缓冲稳定下来。
直流电动机的调速方法直流电动机分为有换向器和无换向器两大类。
直流电动机调速系统较早采用恒定直流电压给直流电动机供电,通过改变电枢回路中的电阻来实现调速。
这种方法简单易行、设备制造方便、价格低廉;但缺点是效率低、机械特性软,不能得到较宽和平滑的调速性能。
该法只适用在一些小功率且调速范围要求不大的场合。
30年代末期,发电机-电动机系统的出现才使调速性能优异的直流电动机得到广泛应用。
这种控制方法可获得较宽的调速范围、较小的转速变化率和平滑的调速性能。
但此方法的主要缺点是系统重量大、占地多、效率低及维修困难。
近年来,随着电力电子技术的迅速发展,由晶闸管变流器供电的直流电动机调速系统已取代了发电机-电动机调速系统,它的调速性能也远远地超过了发电机-电动机调速系统。
特别是大规模集成电路技术以及计算机技术的飞速发展,使直流电动机调速系统的精度、动态性能、可靠性有了更大的提高。
电力电子技术中IGBT等大功率器件的发展正在取代晶闸管,出现了性能更好的直流调速系统。
直流电动机的转速n和其他参量的关系可表示为(1)式中Ua——电枢供电电压(V);Ia ——电枢电流(A);Ф——励磁磁通(Wb);Ra——电枢回路总电阻(Ω);CE——电势系数,,p为电磁对数,a为电枢并联支路数,N为导体数。
由式1可以看出,式中Ua、Ra、Ф三个参量都可以成为变量,只要改变其中一个参量,就可以改变电动机的转速,所以直流电动机有三种基本调速方法:(1)改变电枢回路总电阻Ra;;(2)改变电枢供电电压Ua;(3)改变励磁磁通Ф。
1. 改变电枢回路电阻调速各种直流电动机都可以通过改变电枢回路电阻来调速,如图1(a)所示。
此时转速特性公式为(2)式中Rw为电枢回路中的外接电阻(Ω)。
{{分页}}图1(a) 改变电枢电阻调速电路图1(b) 改变电枢电阻调速时的机械特性当负载一定时,随着串入的外接电阻Rw的增大,电枢回路总电阻R=(Ra+Rw)增大,电动机转速就降低。
摘要当今,自动化控制系统已经在各行业得到了广泛的应用和发展,而直流调速系统控制作为电气传动的主要方式之一,在现代化生产中起着主要作用。
随着微电子技术的发展,集成芯片在调速系统中的应用不仅使系统简化,体积减小,可靠性提高,而且各种经典和智能算法都分别在调速系统中得到了灵活的应用,以此来实现最优控制。
本设计从直流电动机的工作原理入手,并详细分析了系统的原理与其静态和动态性能。
然后按照自动控制原理,对转速闭环调速系统的设计参数进行分析和计算,还在直流调速系统理论研究的基础上,对转速闭环直流调速系统中的转速调节器采用PI控制算法;提出了PI参数的整定方法,转速闭环直流调速系统是性能很好,应用广泛的直流调速系统, 采用转速闭环直流调速系统可获得优良的静、动态调速特性。
转速闭环直流调速系统的控制规律,性能特点和设计方法是各种交、直流电力拖动自动控制系统的重要基础。
在设计中采用TL494控制的PWM 脉宽调节作为控制电路。
关键词:PWMVDMOS 转速闭环ABSTRACTNowadays, automation control system has been widely in industries, and the application and development of electric control system of dc speed as the main method of transmission, in modern plays a main role in production. Along with the development of microelectronics technology, integrated chips in the governing system not only makes the application system, volume decreases, and reliability, and various classic and intelligent algorithm in the governing system of the flexible application, so as to achieve the optimal control.This design from the working principle of dc motor are analyzed in detail, and the principle and system static and dynamic performance. Then according to the principle of the automatic control system of single loop, the design parameters of analysis and calculation, and also in dc speed control system based on the study of the theory of single closed loop speed regulator in the dc speed control system by PI control algorithm,, the speed closed loop dc speed control system is performance is very good, one of the most widely used dc speed control system, adopt single closed loop speed dc speed control system can get good static and dynamic characteristics of speed. Speed single closed loop control dc speed control system, the characteristics and the design method of ac, dc power is dragging the automatic control system is the important foundation. In the design of TL494 adopted PWM control pulse width adjustment as the control circuit. Keywords: PWM VOMOS CLOSED LOOP SPEED REGULATION目录前言1第1章PWM单闭环直流调速控制系统方案的确定21.1 PWM单闭环直流调速系统拖动方案的确定21.1.1 直流电机的选择与调速方法21.1.2 电力拖动供电方案的确定31.2 PWM单闭环直流调速系统控制方案的确定51.2.1 采用转速闭环直流调速的理由71.2.2 选择PWM控制系统的理由71.2.3 选择VDMOS的主电路的理由8第2章转速单闭环直流调速控制系统92.1 转速单闭环直流调速系统的系统组成92.1.1 转速控制的要求102.1.2 转速调速指标102.1.3 调速围、静差率和额定速降之间的关系112.2 转速单闭环直流调速系统的原理图122.2.1 转速单闭环直流调速系统的静特性分析122.2.2 转速单闭环直流调速系统的稳态结构图13第3章变流器主电路和保护环节设计153.1 PWM信号发生器153.1.1 TL494芯片的主要特点153.1.2 TL494引脚各端子功能173.1.3 TL494的工作原理173.2 检测环节183.2.1 转速检测与其测速发电机183.2.2过电流保护环节 (19)3.2.3电机驱动电路203.2.4调速方法 (2)13.3 调节器的选择与调整213.3.1 调节器电路213.3.2 调节器限幅22第4章调速系统动态参数的工程设计244.1 调节器工程设计方法的基本思路244.2 转速调节器的设计254.2.1转速调节器的选择254.2.2 转速调节器参数的选择25结论27参考文献28附录错误!未定义书签。
辽宁工业大学单片机与接口技术课程设计(论文)题目:小直流电机调速控制系统院(系):专业班级:学号:学生:指导教师:教师职称:起止时间:2014-6-30至2014-7-11课程设计(论文)任务及评语院(系):教研室:目录第1章绪论 (1)第2章元器件的介绍 (2)2.1AT89C51单片机 (2)2.2ADC0809单片机 (4)2.3DAC0832单片机 (5)第3章方案设计 (7)3.1总设计方案 (7)3.2控制电路 (7)3.3最小系统与显示器 (8)3.3驱动电路 (8)3.4外部中断设置 (9)第4章程序代码 (10)第5章课程设计总结 (36)参考文献...................................................... (38)附录...................................................... .. (39)第1章绪论单片微型计算机的诞生是计算机发展史上的一个新的里程碑。
近年来,随着技术的发展和进步,以及市场对产品功能和性能的要求不断提高,直流电动机的应用更加广泛,尤其是在智能机器人中的应用。
直流电动机的起动和调速性能、过载能力强等特点显得十分重要,为了能够适应发展的要求,单闭环直流电动机的调速控制系统得到了很大的发展。
而作为单片嵌入式系统的核心—单片机,正朝着多功能、多选择、高速度、低功耗、低价格、大存储容量和强I/O功能等方向发展。
随着计算机档次的不断提高,功能的不断完善,单片机已越来越广泛地应用在各种领域的控制、自动化、智能化等方面,特别是在直流电动机的调速控制系统中。
这是因为单片机具有很多优点:体积小,功能全,抗干扰能力强,可靠性高,结构合理,指令丰富,控制功能强,造价低等。
所以选用单片机作为控制系统的核心以提高整个系统的可靠性和可行性。
对直流电机调速器设计的研究,主要实现对电机的控制。
本课程设计主要是通过对电位器的调节实现电机的加速、减速操作。
并实现电路的仿真。
为实现系统的微机控制,在设计中,采用了AT89C51单片机作为整个控制系统的控制电路的核心部分,配以各种显示、驱动模块,实现对电动机转速参数的显示和测量。
设计的整个控制系统,在硬件结构上采用了大量的集成电路模块,大大简化了硬件电路,提高了系统的稳定性和可靠性,使整个系统的性能得到提高。
第2章元器件的介绍2.1 AT89C51单片机ATMEL公司的AT89C51芯片具有以下特性: 4KB片在系统可编程Flash程序存储器;时钟频率为0~33MHz;128字节片随机读写存储器(RAM);32个可编程I/O引脚; 2个16位定时/计数器;6个中断源,2级优先级;全双工串行通信接口;监视定时器;低功耗的闲置和掉电模式。
AT89C51引脚功能介绍:Vcc:AT89C51电源正端输入,接+5V;Vss:电源接地端;XTAL1:单芯片系统时钟的反相放大器输入端;XTAL2:系统时钟的反相放大器输出端;RST/VPD:RST是复位信号,高电平有效,在此引脚上出现两个机器周期以上的高电平将使单片机复位。
RST的第二功能是备用电源VPD的输入端。
EA/:外部程序存储器地址允许输入端/固化编程电压输入端。
当EA端Vpp保持高电平时,单片机复位后访问片存储器ROM。
当程序计数器PC的值超过4KB时,将自动转去执行片外存储器ROM的程序。
当EA端接地保持低电平时,则只访问片外程序存储器,而不管部是否有程序存储器。
ALE/:地址锁存允许信号端。
当访问外部存储器时,地址锁存允许PROGALE(address latch enable)信号的输出用于锁存低8位地址的控制信号,此信号频率为振荡器的1/6。
当不访问片外存储器时,ALE信号可用作对外输出时钟或定时信号。
ALE端可驱动8个LS型TTL负载。
PSEN:程序存储器允许输出信号端(program store enable)。
此端定时输出负脉冲作为读片外存储器的选通信号。
AT89C51可以利用PSEN及RD引脚分别启用存在外部的RAM与EPROM,使得数据存储器与程序存储器可以合并在一起而共用64K的定址围。
PSEN端同样可驱动8个LS型TTL负载。
P0口:P0.0~P0.7。
P0口第一功能是作为通用的I/O口,CPU在传送输入/输出数据时,输出数据可以锁存,输入数据可以缓存;P0口第二功能是当CPU访问片外存储器时,分时提供低8位地址和8位数据的复位总线。
P1口:P1.0~P1.7。
P1口第一功能是作为通用I/O口;P1口第二功能是在对片EPROM编程或校验时输入片EPROM的低8位地址。
P2口:P2.0~P2.7。
P2口第一功能是当不带片外存储器时,作为通用I/O口;P2口第二功能是当带片外存储器时,与P0口配合,传送片外存储器的高8位地址,共同选中片外存储器单元。
P3口:P3.0~P3.7。
P3口除了做通用的I/O口外,作为控制用的第二功能如表3-2所示:表3-2:P3口各位的第二功能P3口的位第2功能注释P3.0 RXD 串行数据接收口P3.1 TXD 串行数据发送口P3.2 INT0 外部中断0输入P3.3 INT1 外部中断1输入P3.4 T0 定时器/计数器0外部输入 P3.5 T1 定时器/计数器0外部输入 P3.6 WR外部RAM写选通信号P3.7 RD外部RAM读选通信号2.2 ADC0809美国国家半导体公司的ADC0809芯片具有以下特性:8路输入通道,8位A/D转换器,即分辨率为8位。
具有转换起停控制端。
转换时间为100μs(时钟为640kHz时),130μs(时钟为500kHz时)单个+5V电源供电模拟输入电压围0~+5V,不需零点和满刻度校准。
工作温度围为-40~+85摄氏度低功耗,约15mW。
ADC0809引脚功能介绍100ns0809转换)。
当A/D转换结束时,此端输出一个高电平(转换期间一直为低电平)。
OE:数据输出允许信号,输入,高电平有效。
当A/D转换结束时,此端输入一个高电平,才能打开输出三态门,输出数字量。
CLK:时钟脉冲输入端。
要求时钟频率不高于640KHZ。
REF(+)、REF(-):基准电压。
Vcc:电源,单一+5V。
GND:地。
注:仿真时只能用ADC0808,与ADC0809功能一样。
2.3 DAC0832D0~D7:8位数据输入线,TTL电平,有效时间应大于90ns(否则DAC0832是8分辨率的D/A转换集成芯片。
与微处理器完全兼容。
这个DA芯片以其价格低廉、接口简单、转换控制容易等优点,在单片机应用系统中得到广泛的应用。
D/A转换器由8位输入锁存器、8位DAC寄存器、8位D/A转换电路及转换控制电路构成。
a.主要特性参数:分辨率为8位稳定时间1us;可单缓冲、双缓冲或直接数字输入;只需在满量程下调整其线性度;单一电源供电(+5V~+15V);低功耗,200mW。
b.芯片结构:锁存器的数据会出错);CS:片选信号输入线(选通数据锁存器),低电平有效;WR1:数据锁存器写选通输入线,负脉冲(脉宽应大于500ns)有效。
由ILE、CS、WR1的逻辑组合产生LE1,当LE1为高电平时,数据锁存器状态随输入数据线变换,LE1的负跳变时将输入数据锁存;XFER:数据传输控制信号输入线,低电平有效,负脉冲(脉宽应大于500ns)有效;WR2:DAC寄存器选通输入线,负脉冲(脉宽应大于500ns)有效。
由WR1、XFER的逻辑组合产生LE2,当LE2为高电平时,DAC寄存器的输出随寄存器的输入而变化,LE2的负跳变时将数据锁存器的容打入DAC寄存器并开始D/A转换。
IOUT1:电流输出端1,其值随DAC寄存器的容线性变化;IOUT2:电流输出端2,其值与IOUT1值之和为一常数;Rfb:反馈信号输入线,改变Rfb端外接电阻值可调整转换满量程精度;Vcc:电源输入端,Vcc的围为+5V~+15V;VREF:基准电压输入线,VREF的围为-10V~+10V;AGND:模拟信号地DGND:数字第3章方案设计3.1 总方案设计本设计的硬件电路只要包括最小系统与显示器、控制电路、驱动电路三大部分。
最小系统只要是为了使单片机正常工作。
控制电路通过操作电位器来控制电机的转速。
驱动电路主要是对单片机输出的脉冲进行功率放大,从而驱动电机转动。
设计流程图如下:图33.2控制电路图3.2控制电路原理图如图 3.2所示,芯片ADC0808采样电位器的值,并转化为数字信号传给AT89C51,通过上下滑动电位器,来改变电压的大小,由此采样不同的电压值,AT8951通过采样值的大小来调节电机转速。
3.3最小系统与显示器图3.3单片机最小系统或者称为最小应用系统,素质用最少的元件组成的单片机可以工作的系统,对51系列单片机来说,最小系统一般应该包括:单片机、复位电路、晶振电路。
AT89C51的P1口和P2口的高四位控制LED显示屏,P0口接收来自ADC0808的信号。
LED显示屏显示ADC0808采样的电压值。
3.4驱动电路图3.3单片机AT89S51输出的脉宽调制(PWM)信号需经过功率放大才能驱动电机3.5 外部中断设置1)外部中断允许设置中断控制寄存器IE的EX0对应INT0,EX1对应INT1,EA为中断的总开关,若要开放外部中断,只要将IE对应的位和总开关EA置1即可。
如:开放外部中断0的设置:SETB EX0SETB EA开放外部中断0和1的设置:SETB EX0SETB EX1SETB EA(2)外部中断触发方式设置单片机外部中断有两种触发方式,一种是电平触发方式,另一种是脉冲触发方式,单片机外部中断触发方式与TCON的IT位有关。
电平触发设置方法:CLR ITX,为低电平触发方式。
脉冲触发设置方法:SETB ITX=1,为脉冲下降沿触发方式。
在使用外部中断时,如果不进行设置,则为电平触发方式。
(3)外部优先级设置外部中断IN0、INT1的中断优先级的设置是通过设置IP寄存器实现的,IP的PX0对应INT0,PX1对应INT1。
PX置1为高级中断,PX为0为低级中断。
第4章程序代码;============================================================= ====Q0000: LJMP Q02D1;==========================================================================Q0003: DB 00H, 00H, 00H, 00H, 00H, 00H, 00H, 00H ;........Q000B: DB 02H, 03H, 90H ;...;============================================================= =============Q000E: MOV A,R4ORL A,R5JZ Q0023MOV A,R0ORL A,R1JNZ Q002DMOV A,R5RLC AMOV A,R4RLC AINC AJZ Q002ACLR AMOV R4,AMOV R7,AMOV R6,AMOV R5,AQ0022: RET;============================================================= =============Q0023: MOV A,R1RLC AMOV A,R0INC AJNZ Q0022Q002A: LJMP Q01BE;============================================================= =============Q002D: LCALL Q0189ANL A,R0INC AJZ Q003DCLR AXCH A,R4ADD A,#81HJNC Q0040ADD A,R0JNC Q0046Q003D: LJMP Q01C8;============================================================= =============Q0040: ADD A,R0JC Q0046LJMP Q01C5;============================================================= =============Q0046: PUSH ACCMOV A,R3ORL A,R2JNZ Q0090CJNE R1,#80H,Q0055MOV R3,ALJMP Q01B4;============================================================= =============Q0055: MOV A,R7ORL A,R6JNZ Q0075CJNE R5,#80H,Q0064Q005C: MOV A,R3MOV R7,AMOV A,R2MOV R6,AMOV A,R1MOV R5,ASJMP Q004F;============================================================= =============Q0064: MOV A,R1MOV B,R5MUL ABMOV R6,AMOV A,BLJMP Q00F7;============================================================= =============Q006E: MOV A,R1XCH A,R5MOV R1,AMOV R6,AMOV A,R3MOV R7,AQ0075: MOV A,R7MOV B,R1MUL ABMOV R4,AMOV A,BXCH A,R6MOV B,R1MUL ABADD A,R6MOV R7,ACLR AADDC A,BXCH A,R5MOV B,R1MUL ABADD A,R5MOV R6,ACLR AADDC A,BSJMP Q00F7;============================================================= =============Q0090: MOV A,R7ORL A,R6JNZ Q0099CJNE R5,#80H,Q006ESJMP Q005C;============================================================= =============Q0099: MOV A,R7MOV B,R3MUL ABMOV R4,BMOV A,R6MOV B,R3MUL ABADD A,R4MOV R4,ACLR AADDC A,BMOV R0,AMOV A,R7MOV B,R2MUL ABADD A,R4MOV A,BADDC A,R0MOV R4,ACLR ARLC AXCH A,R3MOV B,R5MUL ABADD A,R4MOV A,BADDC A,R3 MOV R0,A MOV A,R6 MOV B,R2 MUL ABADD A,R4 MOV R4,A MOV A,BADDC A,R0 MOV R0,A CLR ARLC AXCH A,R7 MOV B,R1 MUL ABADD A,R4 MOV R4,A MOV A,BADDC A,R0 XCH A,R7 ADDC A,#00H XCH A,R6 MOV B,R1 MUL ABADD A,R7 MOV R7,A MOV A,BMOV R6,ACLR ARLC AXCH A,R1MOV B,R5MUL ABADD A,R6MOV R6,AMOV A,BADDC A,R1XCH A,R5MOV B,R2MUL ABADD A,R7MOV R7,AMOV A,BADDC A,R6MOV R6,ACLR AADDC A,R5Q00F7: MOV R5,ARLC APOP ACCMOV R3,AJNC Q0105INC R3CJNE R3,#00H,Q0111 LJMP Q01C8;============================================================= =============Q0105: MOV A,R4ADD A,R4MOV R4,AMOV A,R7RLC AMOV R7,AMOV A,R6RLC AMOV R6,AMOV A,R5RLC AMOV R5,AQ0111: LJMP Q01A0;============================================================= =============Q0114: DB 75H,0F0H, 20H, 80H, 0EH ;u....;============================================================= =============Q0119: MOV B,#10HSJMP Q0123;============================================================= =============Q011E: DB 75H,0F0H, 08H, 7DH, 00H ;u..}.;============================================================= =============Q0123: MOV R6,#00HMOV R7,#00HRLC AMOV F0,CJNB F0,Q0130LCALL Q0228Q0130: MOV A,R4RLC AJC Q0144MOV A,R7RLC AMOV R7,AMOV A,R6RLC AMOV R6,AMOV A,R5RLC AMOV R5,AMOV A,R4RLC AMOV R4,ADJNZ B,Q0130RET;============================================================= =============Q0144: MOV A,BADD A,#7EHMOV C,F0RRC AXCH A,R4MOV ACC.7,CXCH A,R5XCH A,R6MOV R7,ARET;============================================================= =============Q0152: MOV A,R5SETB ACC.7XCH A,R5RLC AMOV A,R4RLC AMOV F0,CADD A,#81HJC Q0165CLR AQ0160: MOV R7,AMOV R6,AMOV R5,AMOV R4,AQ0164: RET;============================================================= =============Q0165: MOV R4,ACLR AXCH A,R7XCH A,R6XCH A,R5XCH A,R4ADD A,#0E0HJNC Q0180MOV A,#0FFHSJMP Q0160;============================================================= =============Q0173: CLR CXCH A,R4RRC AXCH A,R4XCH A,R5RRC AXCH A,R5XCH A,R6RRC AXCH A,R6XCH A,R7RRC AXCH A,R7Q0180: INC AJNZ Q0173JNB F0,Q0164LJMP Q0228;============================================================= =============Q0189: MOV A,R1SETB ACC.7XCH A,R1RLC AMOV A,R0RLC AMOV R0,AMOV F0,CMOV A,R5SETB ACC.7XCH A,R5RLC AMOV A,R4RLC AMOV R4,AJNC Q019FCPL F0Q019F: RET;============================================================= =============Q01A0: MOV A,R4JNB ACC.7,Q01B4INC R7CJNE R7,#00H,Q01B4INC R6CJNE R6,#00H,Q01B4INC R5CJNE R5,#00H,Q01B4INC R3MOV A,R3JZ Q01C8Q01B4: MOV C,F0MOV A,R3RRC AMOV R4,AMOV A,R5MOV ACC.7,CMOV R5,ARET;============================================================= =============Q01BE: MOV A,#0FFHQ01C0: MOV R4,AMOV R5,AQ01C2: MOV R6,AMOV R7,ARET;============================================================= =============Q01C5: CLR ASJMP Q01C0;============================================================= =============Q01C8: MOV C,F0MOV A,#0FFHRRC AMOV R4,AMOV R5,#80HCLR ASJMP Q01C2;============================================================= =============Q01D3: CJNE R4,#00H,Q01E1CJNE R6,#00H,Q0202MOV A,R7MOV B,R5DIV ABMOV R7,AMOV R5,BRET;============================================================= =============Q01E1: CLR AXCH A,R4MOV R0,AMOV B,#08HQ01E7: MOV A,R7ADD A,R7MOV R7,AMOV A,R6RLC AMOV R6,AMOV A,R4RLC AMOV R4,AMOV A,R6SUBB A,R5MOV A,R4SUBB A,R0JC Q01FBMOV R4,AMOV A,R6SUBB A,R5MOV R6,AINC R7Q01FB: DJNZ B,Q01E7CLR AXCH A,R6MOV R5,ARET;============================================================= =============Q0202: MOV A,R5MOV R0,AMOV B,AMOV A,R6DIV ABJB OV,Q0227MOV R6,AMOV R5,BMOV B,#08HQ0211: MOV A,R7ADD A,R7MOV R7,AMOV A,R5RLC AMOV R5,AJC Q0220SUBB A,R0JNC Q0222DJNZ B,Q0211RET;============================================================= =============Q0220: CLR CSUBB A,R0Q0222: MOV R5,AINC R7DJNZ B,Q0211Q0227: RET;============================================================= =============Q0228: CLR CCLR ASUBB A,R7MOV R7,ACLR ASUBB A,R6MOV R6,ACLR ASUBB A,R5MOV R5,ACLR ASUBB A,R4MOV R4,ARET;============================================================= =============Q0236: SETB 20H.0SETB P3.7Q023A: SETB P3.0CLR P3.0Q023E: JB P3.2,Q0245SETB P3.1SJMP Q023E;============================================================= =============Q0245: MOV R7,P0MOV 1DH,#00HMOV 1EH,R7LCALL Q03E0MOV R4,1DHMOV R5,1EHCLR ALCALL Q0119MOV R3,#48HMOV R2,#0E1HMOV R1,#0FAHMOV R0,#3FHLCALL Q000ELCALL Q0152MOV 1DH,R6MOV 1EH,R7CLR P3.1MOV R4,#00HMOV R5,#0AHLCALL Q01D3MOV A,#09HMOV R0,AMOV A,R0MOV 19H,A MOV R6,1DH MOV R7,1EH MOV R4,#00H MOV R5,#0AH LCALL Q01D3 MOV R4,#00H MOV R5,#0AH LCALL Q01D3 MOV A,#09H ADD A,R5MOV R0,AMOV A,R0MOV 1AH,A MOV R6,1DH MOV R7,1EH MOV R4,#00H MOV R5,#64H LCALL Q01D3 MOV R4,#00H MOV R5,#0AH LCALL Q01D3 MOV A,#09H ADD A,R5MOV R0,AMOV A,R0MOV R6,1DHMOV R7,1EHMOV R4,#03HMOV R5,#0E8HLCALL Q01D3MOV A,#09HADD A,R7MOV R0,AMOV A,R0MOV 1CH,ACLR AMOV 21H,AQ02C0: MOV A,21HSETB CSUBB A,#0C8HJC Q02CALJMP Q023A;============================================================= =============Q02CA: LCALL Q035DINC 21HSJMP Q02C0;============================================================= =============Q02D1: MOV R0,#7FHCLR AQ02D4: MOV R0,ADJNZ R0,Q02D4LJMP Q0318;============================================================= =============Q02DD: LJMP Q0236;============================================================= =============Q02E0: CLR AMOVC A,A+DPTRINC DPTRMOV R0,AQ02E4: CLR AMOVC A,A+DPTRINC DPTRJC Q02ECMOV R0,ASJMP Q02ED;============================================================= =============Q02EC: MOVX R0,AQ02ED: INC R0DJNZ R7,Q02E4SJMP Q031B;============================================================= =============Q02F2: CLR AMOVC A,A+DPTRINC DPTRMOV R0,AADD A,#0CHXCH A,R0CLR CRLC ASWAP AANL A,#0FHORL A,#20HXCH A,R0MOVC A,A+PCJC Q030ACPL AANL A,R0SJMP Q030B;============================================================= =============Q030A: ORL A,R0Q030B: MOV R0,ADJNZ R7,Q02F2SJMP Q031B;============================================================= =============Q0310: DB 01H, 02H, 04H, 08H, 10H, 20H, 40H, 80H ;.......;============================================================= =============Q0318: MOV DPTR,#03B5HQ031B: CLR AMOV R6,#01HJZ Q02DDINC DPTRMOV R7,AANL A,#3FHJNB ACC.5,Q0331 ANL A,#1FHMOV R6,ACLR AMOVC A,A+DPTRINC DPTRJZ Q0331INC R6Q0331: XCH A,R7ANL A,#0C0HADD A,ACCJZ Q02E0JC Q02F2CLR AMOVC A,A+DPTRINC DPTRMOV R2,ACLR AMOVC A,A+DPTRINC DPTRMOV R0,AQ0342: CLR AMOVC A,A+DPTRINC DPTRXCH A,R0XCH A,DPLXCH A,R0XCH A,R2XCH A,DPHXCH A,R2MOVX DPTR,AINC DPTRXCH A,R0XCH A,DPLXCH A,R0XCH A,R2XCH A,DPHXCH A,R2DJNZ R7,Q0342DJNZ R6,Q0342SJMP Q031B;============================================================= =============Q035D: CLR AMOV R3,AMOV R2,AQ0360: MOV R7,03HMOV A,1FHMOV R0,07HINC R0SJMP Q036B;============================================================= =============Q0369: CLR CRLC AQ036B: DJNZ R0,Q0369MOV P2,AMOV A,#19HADD A,R3MOV R0,AMOV A,R0MOV P1,AMOV A,R3XRL A,#02HORL A,R2JNZ Q037FORL P1,#80HQ037F: MOV R7,#01HLCALL Q03CFINC R3CJNE R3,#00H,Q0389INC R2Q0389: MOV A,R3XRL A,#04HORL A,R2JNZ Q0360RET;============================================================= =============Q0390: DB 0C0H,0E0H,0C0H,0D0H, 30H, 00H, 09H,0C2H ;Q0398: DB 0B7H,0C2H, 00H, 85H, 1EH, 8CH, 80H, 0BH ;Q03A0: DB 0D2H,0B7H,0D2H, 00H,0C3H, 74H,0FFH, 95H ;Q03A8: DB 1EH,0F5H, 8CH, 75H, 8AH, 00H,0D2H, 8CH ;Q03B0: DB 0D0H,0D0H,0D0H,0E0H, 32H, 10H, 09H, 3FH ;Q03B8: DB 06H, 5BH, 4FH, 66H, 6DH, 7DH, 07H, 7FH ;Q03C0: DB 6FH, 77H, 7CH, 39H, 5EH, 79H, 71H, 01H ;Q03C8: DB 1FH, 01H, 02H, 1DH, 00H, 00H, 00H ;;============================================================= =============Q03CF: CLR AMOV R6,AQ03D1: MOV A,R6CLR CSUBB A,R7JNC Q03DFCLR AMOV R5,AQ03D8: INC R5CJNE R5,#78H,Q03D8INC R6SJMP Q03D1;============================================================= =============Q03DF: RET;============================================================= =============Q03E0: SETB EASETB ET0MOV TMOD,#01HMOV TH0,1EHCLR AMOV TL0,ASETB TR0RET;============================================================= =============第5章仿真与调试5.1软件介绍Proteus软件介绍Proteus(海神)的ISIS是一款Labcenter出品的电路分析实物仿真系统,可仿真各种电路和IC,并支持单片机,元件库齐全,使用方便,是不可多得的专业的单片机软件仿真系统。