《机械原理》第八版课后习题答案
- 格式:docx
- 大小:2.22 MB
- 文档页数:11
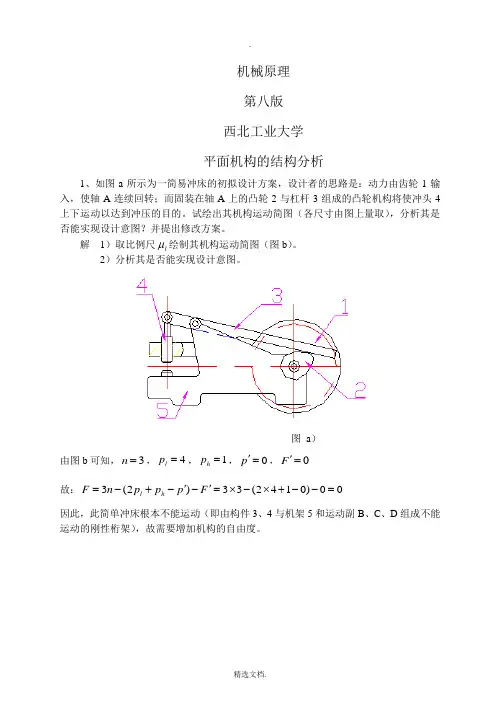
第2章 机构的结构分析(P29)2-12:图a 所示为一小型压力机。
图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O 连续转动。
在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C 轴上下摆动。
同时,又通过偏心轮1’、连杆2、滑杆3使C 轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G 使冲头8实现冲压运动。
试绘制其机构运动简图,并计算自由度。
解:分析机构的组成:此机构由偏心轮1’(与齿轮1固结)、连杆2、滑杆3、摆杆4、齿轮5、滚子6、滑块7、冲头8和机架9组成。
偏心轮1’与机架9、连杆2与滑杆3、滑杆3与摆杆4、摆杆4与滚子6、齿轮5与机架9、滑块7与冲头8均组成转动副,滑杆3与机架9、摆杆4与滑块7、冲头8与机架9均组成移动副,齿轮1与齿轮5、凸轮(槽)5与滚子6组成高副。
故解法一:7=n 9=l p 2=h p12927323=-⨯-⨯=--=h l p p n F解法二:8=n 10=l p 2=h p 局部自由度1='F11210283)2(3=--⨯-⨯='-'-+-=F p p p n F h l(P30) 2-17:试计算如图所示各机构的自由度。
图a 、d 为齿轮-连杆组合机构;图b 为凸轮-连杆组合机构(图中在D 处为铰接在一起的两个滑块);图c 为一精压机机构。
并问在图d 所示机构中,齿轮3与5和齿条7与齿轮5的啮合高副所提供的约束数目是否相同?为什么?解: a) 4=n 5=l p 1=h p11524323=-⨯-⨯=--=h l p p n Fb) 5=n 6=l p 2=h p12625323=-⨯-⨯=--=h l p p n F12625323=-⨯-⨯=--=h l p p n Fc) 5=n 7=l p 0=h p10725323=-⨯-⨯=--=h l p p n Fd) 6=n 7=l p 3=h p13726323=-⨯-⨯=--=h l p p n F(C 可看做是转块和导块,有1个移动副和1个转动副)齿轮3与齿轮5的啮合为高副(因两齿轮中心距己被约束,故应为单侧接触)将提供1个约束。
齿条7与齿轮5的啮合为高副(因中心距未被约束,故应为双侧接触)将提供2个约束。
第3章 平面机构的运动分析(P50) 3-8:在图示的凸轮机构中,已知凸抡1以等角速度s rad 101=ω转动,凸轮为一偏心圆,其半径︒====90,50,15,251ϕmm l mm l mm R AD AB ,试用图解法求构件2的角速度2ω与角加速度2α 。
解:1) 高副低代,以选定比例尺,绘制机构运动简图。
(图3-8 )2) 速度分析:图3-6(b )s m l v v AB B B 15.0015.010114=⨯===ω 取B 4、、B 2为重合点。
速度方程:4242B B B B v v v += 速度多边形如图3-8(b)s m pb v V B 1175.05.23005.022=⨯==μ sm b b v V B B 16.032005.02442=⨯==μs l pb l v BD v BD B 129.2400125.01175.0222=⨯===μω 转向逆时针Bω11ACD 234ω2α2b 2bp′4′图3-8(b)(c)3)加速度分析:图3-8(c )rB B K B B B t B n B a a a a a 4242422++=+2221145.1015.0101s m l a a AB n B n B =⨯===ω122222D2.290.00125410.269n B B a l m s ω==⨯⨯= 242242732.016.029.222s m v a B B k B B =⨯⨯==ω22222136.94100125.01204.0s BD b b l a l a BD tB =⨯⨯='''==μμα 转向顺时针。
(P51) 3-11:试求图示各机构在图示位置时全部瞬心的位置,并给出连杆上E 点的速度方向。
(E 点的速度方向:找到固连E 点构件的绝对瞬心位置,连接该绝对瞬心和E 点,过E 点做垂线即是E 点的速度方向)(a )(b )(c)(d)(P51) 3-15:在图所示的牛头刨床机构中,h=800mm ,h 1=360mm ,h 2=120mm ,AB l =200mm ,CD l =960mm ,DE l =160mm ,设曲柄以等角速度ω1=5rad/s 逆时针方向回转,试用图解法求机构在φ1=135°位置时,刨头上点C 的速度C v 。
解: 选定比例尺,mm mAB l AB l 001.01212.0===μ 绘制机构运动简图。
如图(a) 解法一:速度分析:先确定构件3的绝对瞬心P 36,利用瞬心多边形,如图(b )由构件3、5、6组成的三角形中,瞬心P 36、P 35、P 56必在一条直线上,由构件3、4、6组成的三角形中,瞬心P 36、P 34、P 46也必在一条直线上,二直线的交点即为绝对瞬心P 36。
速度方程2323B B B B v v v +=mm s m pb v B v 05.0201===μs m l v v AB B B 12.05112=⨯===ω 方向垂直AB 。
V B3的方向垂直BG (BP 36),V B3B2的方向平行BD 。
速度多边形如图3-9 (c)速度方程33CB B Cv v v += sm pc v V C 24.1==μ解法二:确定构件3的绝对瞬心P 36后,再确定有关瞬心P 16、P 12、P 23、P 13、P 15,利用瞬心多边形,如图3-9(d )由构件1、2、3组成的三角形中,瞬心P 12、P 23、P 13必在一条直线上,由构件1、3、6组成的三角形中,瞬心P 36、P 16、P 13也必在一条直线上,二直线的交点即为瞬心P 13。
利用瞬心多边形,如图3-9(e )由构件1、3、5组成的三角形中,瞬心P 15、P 13、P 35必在一条直线上,由构件1、5、6组成的三角形中,瞬心P 56、P 16、P 15也必在一条直线上,二直线的交点即为瞬心P 15。
如图3-9 (a) P 15为构件1、5的瞬时等速重合点sm AP v v l P C 24.115115===μω第8章 连杆机构及其设计(P160) 8-7:第9章凸轮机构及其设计(P190) 9-7:试标出题9—6a图在图示位置时凸轮机构的压力角,凸轮从图示位置转过90º后推杆的位移;并标出题9—6b图推杆从图示位置升高位移s时,凸轮的转角和凸轮机构的压力角。
解如图(a)所示,用直线连接圆盘凸轮圆心A和滚子中心B,则直线AB与推杆导路之间所夹的锐角为图示位置时凸轮机构的压力角。
以A为圆心, AB为半径作圆, 得凸轮的理论廓线圆。
连接A与凸轮的转动中心O并延长,交于凸轮的理论廓线于C点。
以O为圆心.以OC为半径作圆得凸轮的基圆。
以O为圆心, 以O点到推杆导路的距离OD为半径作圆得推杆的偏距圆;。
延长推杆导路线交基圆于G-点,以直线连接OG。
过O点作OG的垂线,交基圆于E点。
过E 点在偏距圆的下侧作切线.切点为H点.交理论廓线于F点,则线段EF的长即为凸轮从图示位置转过90后推杆的位移s。
方法同前,在图(b)中分别作出凸轮的理论廓线、基圆、推杆的偏距圆。
延长推杆导路线交基圆于G点,以直线连接OG。
以O为圆心,以滚子中心升高s 后滚子的转动中心K到O点的距离OK为半径作圆弧,交理论廓线于F点。
过F点作偏距圆的切线,交基圆于E点,切点为H。
则∠GO E为推杆从图示位置升高位移s时-凸轮的转角,∠AFH为此时凸轮机构的压力角。
(a) (b)(P190) 9-13:一摆动滚子推杆盘形凸轮机构(参看图9—23),已知lOA=60 mmr0=25 mm,lAB=50 mm,rr=8 mm。
凸轮顺时针方向等速转动,要求当凸轮转过180º时,推杆以余弦加速度运动向上摆动25º;转过一周中的其余角度时,推杆以正弦加速度运动摆回到原位置。
试以作图法设计凸轮的工作廓线。
解推杆在推程及回程段运动规律的位移方程为(1)推程:s=Φ[1-cos(πδ/δ0)/2 0º≤δ≤180º(2)回程:s=Φ[1-(δ/δ`0)十sin(2πδ/δ`0)]/(2π) oº≤δ≤180º计算各分点的位移值如表:根据表作图如图所示第11章 齿轮系及其设计11-16如图所示为两个不同结构的锥齿轮周转轮系,已知z 1=20,z 2=24,z 2,=30,z 3=40,n 1=200 r /min ,n 3=-100 r /min 。
求n H 等于多少? (a)解:(b)解:2311331224401.62030HH H z z n n i n n z z -⨯====-⨯‘131331[1.6]/1H h Hi n n n i -==⨯-(100)-200(1.6-1)=-600r/min 231133122440 1.62030HH H z z n n i n n z z -⨯==-==--⨯‘131331[ 1.6]/1H h Hi n n n i -==-⨯-(-100)-200(-1.6-1)=15.385r/min图示为手动起重葫芦,已知z 1=Z 2,=10,z 2=20,z 3=40。
设各级齿轮的传动效率(包括轴承损失)η1=0.98,曳引链的传动效率η2=0.97。
为提升重G=10 kN 的重物,求必须施加于链轮A 上的圆周力F 。
解:所以2040191010⨯+=⨯411440160Q p i w m Q w m P η∂==414/4710/40.99308.64p Q I N ==⨯⨯=。