空间光滑地震活动性模型中光滑函数的比较研究
- 格式:pdf
- 大小:1.44 MB
- 文档页数:13

复杂油气藏Complex Hydrocarbon Reservoirs第14卷第1期2021年3月doi:ki.fzyqc.2021.01.002四川盆地超深地震大剖面勘探及深部地质结构研究胡峰1,梁顺军I,张晓斌打彭业君2,杨智超1,龙思萍2,王中海2(1.中国石油集团东方地球物理勘探有限责任公司西南物探分公司,四川成都500643;2.中国石油集团东方地球物理勘探有限责任公司西南物探研究院,四川成都500643)摘要:为了研究四川盆地中部地震诱发因素,了解沉积盖层到莫霍界面的地震反射信息,近年来部署了2018GJ和2009HN 两条超深地震大剖面勘探测线,获得了沉积盖层、岩石圈及莫霍界面的深部地震信息,全景式地再现了四川盆地中部岩石圈结构具明显的3大界面(基地、康拉德界面、莫霍面),4大层系(沉积盖层、上地壳和下地壳、上地幔),对四川盆地深部地质结构,特别是康纳德界面及莫霍界面地质特征有了新的初步认识,为研究四川盆地中部地壳结构和地震诱发因素提供了可靠的基础资料。
关键词:超深地震大剖面;天然地震;沉积盖层;莫霍界面;康拉德界面;四川盆地中部中图分类号:P631文献标志码:AUltra-deep layers seismic profile exploration and study on deep geologicalstructure in Sichuan BasinHU Feng1,LIANG Shunjun1,ZHANG Xiaobin1,PENG Yejun2,YANG Zhichao1,LONG Siping2,WANG Zhonghai2(1.BGP Southwest Geophysical Company,CNPC,Chengdu500643,China;2.Southwest Geophysical Exploration Research Institute ofBGP,CNPC,Chengdu500643,China)Abstract:In order to study the seismic inducing factors in the central Sichuan Basin and understand the seismic reflection information from sedimentary caprocks to the Moho interface,two ultra-deep seismic profiles of2018GJ and2009HN have been deployed in recent years,and the deep seismic information of sedimentary caprock,lithosphere and Moho interface has been obtained.A panoramic view of the lithospheric structure in the central Sichuan Basin has three distinct interfaces(base,Conrad interface and Moho discontinuity)and four major strata(i.e.sedimentary caprock,upper and lower crust,and upper mantle).A new preliminary understanding of the deep geological structure of the Sichuan Basin,especially the geological characteristics of the Conrad interface and Moho interface,has provide reliable basic data for the study of the crustal structure and earthquake inducing factors in the central Sichuan Basin.Key words:ultra-deep layers seismic profile;natural earthquake;sedimentary cove;Moho interface;Conrad interface;central Sichuan Basin早期的调查四川盆地基底-莫霍界面地质构造、地层结构,常用勘探成本低的天然地震和非地震(电法、磁力及重力)勘探,因其精度低,只能宏观反映基底或莫霍界面的起伏形态和深度,不能满足深入研究的需求IT〕。



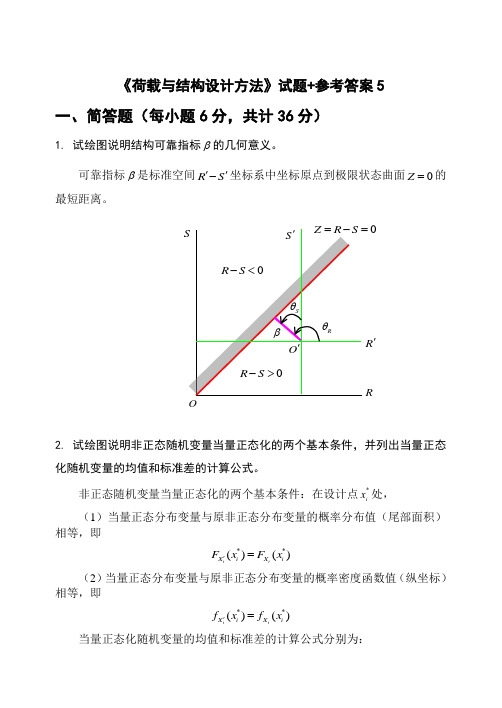
《荷载与结构设计方法》试题+参考答案5一、简答题(每小题6分,共计36分)1. 试绘图说明结构可靠指标β的几何意义。
可靠指标β是标准空间R S ''-坐标系中坐标原点到极限状态曲面0Z =的最短距离。
2. 试绘图说明非正态随机变量当量正态化的两个基本条件,并列出当量正态化随机变量的均值和标准差的计算公式。
非正态随机变量当量正态化的两个基本条件:在设计点*i x 处, (1)当量正态分布变量与原非正态分布变量的概率分布值(尾部面积)相等,即**()()i i X i X i F x F x '=(2)当量正态分布变量与原非正态分布变量的概率密度函数值(纵坐标)相等,即**()()i i X i X i f x f x '=当量正态化随机变量的均值和标准差的计算公式分别为:OR 'R*1*()iiiX i X i X x F x μσ-''⎡⎤=-Φ⎣⎦{}1**()()iii X i X X i F x f x ϕσ-'⎡⎤Φ⎣⎦=3. 简述结构构件可靠度设计的实用表达式包括哪些内容,并列出具体表达式。
(1) 承载能力极限状态设计表达式1102()(,,,)i i inG Gk Q Q k Q C Q k R k k i S S S R f a γγγγψγ=++≤∑01()(,,,)iiinG Gk Q C Q k R k k i S S R f a γγγψγ=+≤∑(2) 正常使用极限状态设计表达式1) 标准组合设计表达式112[]i i nGk Q k C Q k i S S S f ψ=++≤∑2) 频遇组合设计表达式122[]i i i nGk f Q k q Q k i S S S f ψψ=++≤∑ii i X i X i '3) 准永久组合设计表达式31[]i i nGk q Q k i S S f ψ=+≤∑4. 简述荷载代表值有哪些类型,并说明每种代表值的确定方法。
复习提纲1、全球地震活动在空间上有什么特点?如何利用现在对地球结构的了解解释这种特点? 呈带状分布。
无论是震源几何位置(地理的、深度的)、震源强度的空间分布、震源机制的空间分布均与板块学说中的大断层十分一致。
断层说是板块学说的组成部分,板块学说中的断层理论很好地解释了地震活动。
板块学说的主要论点:①软流层(热、粘)上驮着岩石层(冷、脆)一起移动; ②海岭~张裂、发散; ③海沟~腑冲、消没④转换断层~剪切、滑移; ⑤各板块绕轴旋转。
2、根据古登堡-里克特的震级频度公式bM a N -=log ,估计某地区所能发生的最大地震震级。
(假定a=6.7,b=0.9)3、评定地震烈度的主要标志有哪些?1)自然景观的变化 2)建筑物的破坏 3)人和动物的反应 4、影响地震烈度的主要因素地震本身释放的能量、观测点与震源点之间的距离、地质条件、建筑物的类型、调查人本身的因素、当地人对地震的经验等 5、地震烈度和震级的区别?地震烈度:按一定的宏观(野外场地调查)标准,表示地震对地面影响和破坏程度的一种量度,称之为地震烈度。
通常用I 表示。
震级:按一定的微观标准(仪器观测),表示地震波能量大小的量度,常用字母M 表示。
震级和烈度都是衡量地震强度的,根据统计结果,震级M 和震中烈度I0之间有下列关系:0321I M +=6、全球地震带的分布特征,三个主要地震带? 全球的地震带分布: (1)环太平洋地震带位于太平洋边缘地区,即海洋构造和大陆构造的过渡地区。
全球80%的浅震,许多中源地震和差不多的深源地震都发生在这一带,包括大部分灾难性地震。
(2)欧亚地震带沿欧亚大陆南部展布,欧亚地震带内也常发生破坏性地震及少数深源地震,它是最宽的地震带。
我国的大部分地区处于此地震带内。
(3)海岭地震带几乎包括全部海岭构造地区,沿洋中脊展布,又称为洋中脊地震带,它是最长的地震带。
7. 哪个地震带是全球地震活动最强烈的地震带,全球 80%的浅源地震、90%的深源地震均集中在该带上,这是一条对人类危害最大的地震带。
一种六足机器人在复杂地形情况下的步态规划方法摘要:随着近年来全球变暖,火山活动频繁,自然灾害增多,例如飓风,地震等灾害毁坏房屋的事件时有发生,而目前的救灾机器人大多是采用履带式结构,不能很好的完成在复杂地形之上的任务。
研究采用D-H法,蒙特卡洛法等方法,并利用MATLAB,CATIA等软件为工具,构建单腿柱状结构模型,并求出单腿足端在六足本体坐标系下的空间位置矩阵,和各单腿的足端在六足本体坐标系下的空间位置,最后在MATLAB平台中绘制本研究六足机器人腿5的足端的工作空间以及各个二位平面图上的空间范围,最后优化了六足机器人在复杂地形情况的步态运动规划,提升了六足机器人在复杂地形情况下运动的能力。
关键词:六足机器人;复杂地形情况;步态规划1.引言近年来,随着全球变暖,火山活动频繁,地震海啸频发,给人民的生命财产安全带来巨大挑战。
目前救灾主要依靠人工和大型工程机械进行外部作业,而小型的救灾机器人,主要进行进入废墟内部进行被困人员。
目前机器人均采用的是履带式,在复杂情况下,诸如陡坡等情况容易发生事故。
而六足机器人的腿拥有较多的自由度,因此其在运动的过程中较为灵活,而且与轮式和履带式机器人相比较,足式机器人与地面的接触面积更小,故而在崎岖不平的地面上更容易找到合适的支撑点。
但是,六足机器人的步态研究仅限于如何在平整地面上行走加速,对于复杂地形情况下的步态研究关注相对较少。
例如南京理工大学的李桂海对全气动多自由度关节型机器人平稳步态进行了研究,浙江工业大学的郭锦涛便提出了一种新型的多自由度关节机器人在平稳步态的研究。
基于此,本研究将着重于六足机器人的步距计算,以及六足机器人在复杂地形情况下的步态规划。
1.六足机器人的步距计算在机器人的运动分析中,在一个步态周期中与地面接触的各条腿称为支撑相,脱离地面的各条腿称为摆动相,在一个步态周期T中,假设支撑相所用的时间为,摆动相所用的时间为,则占空比再设支撑相的足端的速度为,本体移动速度为,摆动相的足端的速度为步行腿从摆动相到支撑相的位置称为前极限位置(AEP),支撑相到摆动相的位置称为后极限位置(AEP)。