第五讲-GPS绝对(单点)定位
- 格式:ppt
- 大小:333.50 KB
- 文档页数:32


GPS系统及其应用第五讲 GPS系统的绝对定位解算
苗履丰
【期刊名称】《测绘科学》
【年(卷),期】1989()1
【摘要】在应用CPS系统导航定位时,基本的作业方式分为单点定位和联测定位。
单点定位是使用一台接收机用于测定接收机的绝对坐标,联测定位是使用多台接收机用于测定接收机的相对坐标。
在定位解算上单点定位往往使用GPS系统播发的导航电文进行实时处理,而联测定位则可以利用各种星历来源进行事后处理。
单点定位除用于动态实时导航之外,在联测定位之前往往用于参考点绝对坐标的测定,因此绝对定位的导航算法是GPS系统定位解算的基础。
一、广播星历参数对卫星轨道坐标的计算进行卫星定位解算。
【总页数】7页(P40-46)
【关键词】定位解算;GPS;单点定位;广播星历;卫星轨道;导航电文;绝对坐标;钟差;伪距;导航算法
【作者】苗履丰
【作者单位】国家测绘局研究所
【正文语种】中文
【中图分类】P2
【相关文献】
1.GPS绝对定位解算方法探讨 [J], 栾元重;班训海
2.GPS绝对定位的非迭代解算方法 [J], 王忠军;袁秋宇
3.GPS系统及其应用第七讲 GPS系统的误型源及GPS定位技术的应用 [J], 苗履丰
4.GPS系统及其应用第六讲 GPS系统的相对定位解算 [J], 苗履丰
因版权原因,仅展示原文概要,查看原文内容请购买。

GPS单点定位的原理与方法GPS(全球定位系统)单点定位是通过利用卫星信号来计算接收器的位置坐标的一种定位方法。
其原理基于三角测量和卫星轨道测量,具体包括以下几个步骤:1.卫星发射信号:GPS系统由一组人造卫星组成,这些卫星在地球上方不断绕行。
每颗卫星都向地面发射微波信号,包含了卫星的精确位置信息和时间信息。
2.接收器接收信号:GPS接收器是我们手持设备或车载设备中的组成部分,能够接收卫星发射的信号。
至少接收到4个卫星的信号时,GPS接收器开始进行定位计算。
信号的接收通常会受到建筑物、树木、峡谷等遮挡物的干扰。
3.信号时间测量:GPS接收器接收到卫星信号后,会测量信号从卫星发射到接收器接收的时间,根据信号的传播速度得出卫星和接收器之间的距离。
4.三角测量定位:至少接收到4个卫星信号后,GPS接收器会通过三角测量计算出接收器与各个卫星之间的距离差,进而确定接收器所在的位置。
5.计算接收器位置:根据接收器与至少4个卫星之间的距离差,GPS接收器可以利用三角测量原理计算出接收器的空间坐标,即经度、纬度和海拔高度。
6.位置纠正:单点定位的结果通常会受到多种误差的影响,如大气延迟、钟差、多普勒效应等。
为了提高定位的精确度,还需要纠正这些误差。
纠正方法包括差分GPS、RTK(实时动态定位)等。
除了上述的基本原理之外,GPS单点定位还可以通过改进方法来提高定位的精确度。
以下是几种常用的方法:1.多星定位:通过接收更多的卫星信号来计算接收器位置,增加多星定位的可靠性和精度。
2.差分GPS:差分GPS是通过两个或多个接收器同时接收卫星信号,其中一个接收器已知位置,用来纠正目标接收器的误差。
这样可以提高定位的精确度。
3.后处理:将接收器记录到的GPS信号数据回传到办公室,在计算机上进行后期处理,利用更复杂的算法和精确的星历文件来提高定位精度。
4.RTK定位:实时动态定位是一种高精度的GPS定位方法,利用地基台接收器和流动台接收器之间的无线通信,可以实现毫米级的定位精度。
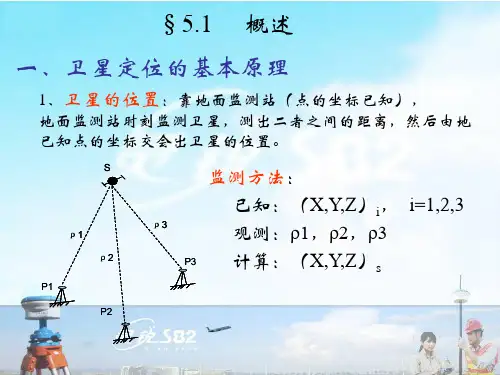
第五章 GPS 绝对定位• 定义– 单独利用一台接收机确定待定点在地固坐标系中绝对位置的方法 •定位结果-与所用星历同属一坐标系的绝对坐标,也称单点定位– 采用广播星历时属WGS-84– 采用IGS – International GPS Service 精密星历时为ITRF – InternationalTerrestrial Reference Frames•特点– 优点:一台接收机单独定位,观测简单,可瞬时定位 – 缺点:精度主要受系统性偏差的影响,定位精度低5.1动态绝对定位1.测码伪距动态绝对定位法测码伪距的误差方程为:当仅观测4颗卫星时,无多余观测量,解算是唯一的。
如果同步观测的卫星数nj 大于4颗时,则需利用最小二乘法平差求解。
误差方程组的一般形式为 根据最小二乘法平差求解 )()()(t t t i i i i l Z a v +=δ[][])()()()(1t t t t i T i i Ti i l a a a Z --=δ)(-)(-)(-)(~)(-)](),(),([t V 0j i t T t I t t t t c X t n t m t l j i g j i j i j i i i j i j i j i δρδρρρδδ+=)(在GPS 中,同时出现在地平线以上的可见卫星数不会多于12个。
测码伪距绝对定位模型广泛用于船只、飞机、车辆等运动目标的导航、监督和管理。
2.测相伪距动态绝对定位法 测相伪距误差方程为:于历元t ,观测nj 颗卫星,误差方程可写为:误差方程的一般式为:式中:观测量的总数和观测卫星数nj 相同,而待定未知数为nj+4。
所以无法解算。
一般无法用测相伪距来进行动态绝对定位。
若于历元 t 同步观测nj 颗卫星,初始整周未知数Nij 已知,则可列出nj 个误差方程:此时,若同步观测卫星数大于等于4时,也可获得唯一实时解。
但载体在运动过程中,要始终保持对所测卫星的连续跟踪,目前在技术上尚有一定困难,同时目前动态解算整⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡)(...)()()(1)()()(1.........1)()()(1)()()()(...)()(2122211121t L t L t L t Z Y X t n t m t l t n t m t l t n t m t l t v t v t v j jj j j n i i i i i i i n i n i n i i i i i i i n i i i δρδδδ)(-)(-)(-)()()(-)](),(),([t V 00j i t T t I t t t N t t c X t n t m t l j i g j i j i j i j i i i j i j i j i δρδρρλϕλδδ++=)(⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡)(...)()()(...)()(1000............00100001)(t c 1)()()(1.........1)()()(1)()()()(...)()(210020122211121t L t L t L t N t N t N t Z Y X t n t m t l t n t m t l t n t m t l t v t v t v j j j j j j n i i i n i i i i i i i n i n i n i i i i i i i n i i iλδδδδ)()()()()()(t t t t t t i i i i i i i i l N e ρb X a v +++=δδ[][][][][]Tn i i i i Tn i i i i Ti i i i Ti Tn ii i i j jjN N N t L t L t L t Z Y X t t v t v t v t ...)(...)()()(1...11)()(...)()()(212121===---==N l X b v δδδδ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=1...000.........0...100...01)()()()(.........)()()()()()()(222111t t n t m t l t n t m t l t n t m t l t i n i n i n i i i i i i i i jj je a周未知数的方法,在应用上也有局限性。