基于QR码的视觉导航AGV系统
- 格式:pdf
- 大小:1.09 MB
- 文档页数:5
AGV常用导航方式对比AGV(Automated Guided Vehicle)是一种自动导引车辆,可以在工业场景中进行物料搬运和运输任务。
AGV具有多种导航方式可供选择,每种方式都有其独特的特点和适应范围。
下面将对AGV常用导航方式进行对比,以便帮助读者选择适合自己需求的导航方式。
1.磁导航磁导航是AGV常用的一种导航方式。
它通过在地面上埋设磁条或者放置磁贴,然后AGV通过感应磁场来确定自己的位置和方向。
磁导航的优点是定位准确,精度高,适用于复杂环境。
然而,磁导航需要进行地面改造,对于一些场景可能不太适用。
2.激光导航激光导航是一种无接触的导航方式,它使用激光传感器扫描周围环境,通过分析激光反射信号来确定位置和方向。
激光导航适用于复杂环境,如仓库、工厂等,能够实现精确定位和避障功能。
然而,激光导航设备价格较高,使用成本较高。
3.视觉导航视觉导航是一种基于摄像头和图像处理算法的导航方式。
它通过捕捉环境中的图片或视频,然后使用图像处理算法来识别和跟踪目标物体,从而实现导航和定位。
视觉导航适用于柔性环境,如办公室、医院等,具有较高的灵活性和自适应性。
然而,视觉导航对于光线、视角等因素比较敏感,光线不好的环境下可能无法正常工作。
4.惯性导航惯性导航是一种基于加速度计和陀螺仪等惯性传感器的导航方式。
它通过测量车辆的加速度和角速度来确定位置和方向。
惯性导航适用于简单环境和短距离移动,具有实时性好和适应性强的特点。
然而,惯性导航容易受到误差累积的影响,导航精度相对较低。
5.超声波导航超声波导航是一种基于超声波传感器的导航方式。
它通过发射超声波并检测回波的时间来计算物体与车辆的距离,从而实现避障和导航功能。
超声波导航适用于近距离避障和定位,具有成本低、检测范围广的优势。
然而,超声波传感器的准确度受到环境因素的影响,如温度、湿度等。
综上所述,AGV常用的导航方式有磁导航、激光导航、视觉导航、惯性导航和超声波导航。

AGV视觉导航技术研究进展AGV(Automated Guided Vehicle)是一种自动导航的搬运车辆,广泛应用于自动化仓储物流系统中。
AGV视觉导航技术是指通过摄像头等视觉设备获取环境信息,实现AGV自主定位、路径规划和避障等功能的技术。
随着人工智能和机器视觉技术的不断发展,AGV视觉导航技术也在不断增强和完善,为物流行业的自动化和智能化提供了更便利和高效的解决方案。
一、三维建图和定位技术:AGV视觉导航的第一步是对环境进行三维建图,以便于AGV能够准确地定位自己的位置。
目前,研究者们通过使用激光雷达、摄像头等传感器,结合SLAM(Simultaneous Localizationand Mapping)算法,实现对环境的高精度建模,并能够实时更新地图信息,以适应环境的变化。
二、路径规划和避障技术:AGV在进行搬运过程中需要避开障碍物并选择最优路径,以提高工作效率和安全性。
目前,研究者们结合图像识别、深度学习等技术,能够实现对环境中的障碍物的快速识别和预测,从而为AGV提供最佳的路径规划方案。
三、交互式控制和协作技术:在实际的物流系统中,多台AGV可能需要协同工作,以完成复杂的搬运任务。
为此,研究者们提出了基于无线通信和分布式控制的协作策略,实现多台AGV之间的信息交换和协同工作,从而提高整个物流系统的效率和灵活性。
四、自适应学习和智能优化技术:随着AGV的不断运行和积累经验,研究者们提出了基于机器学习和智能优化的方法,使得AGV能够根据自身的运行状况和环境的变化,自主进行学习和优化,以实现自适应的路径规划和避障控制。
总的来说,AGV视觉导航技术的研究进展主要集中在三维建图和定位、路径规划和避障、交互式控制和协作、自适应学习和智能优化等方面。
随着人工智能和机器视觉技术的不断创新和应用,AGV视觉导航技术将会更加强大和智能,为自动化物流系统的发展提供更多的可能性。
在未来,AGV视觉导航技术有望成为自动化物流系统中的关键技术,推动整个物流行业向着智能化、高效化和柔性化的方向前进。
AGV智能导航系统研究与实现智能导航系统是自动导引车(AGV)中至关重要的一个组成部分。
该系统能够帮助AGV在复杂的环境中进行定位和导航,同时确保车辆与人员、设备等的安全交互。
本文将研究和实现AGV智能导航系统的关键技术和流程。
1. 系统硬件设计首先,我们需要设计AGV智能导航系统的硬件。
硬件设计包括选择合适的传感器、控制器和电源等。
传感器是智能导航系统的核心组件,常用的传感器有激光传感器、红外线传感器和摄像头等。
这些传感器可以用于感知AGV周围的环境和障碍物。
此外,控制器也是系统的关键部分。
控制器可以根据传感器获取的数据进行判断和决策,从而实现AGV的导航和路径规划。
在选择控制器时,需要考虑其处理速度和计算能力,以确保系统的高效运行。
最后,电源的选择也是重要的一步。
AGV需要持续的电力供应,才能保证系统的正常运行。
因此,选择高品质的电池和电源管理装置是确保AGV长时间运行的关键。
2. 系统软件开发除了硬件设计,系统软件开发也是实现AGV智能导航系统不可或缺的一部分。
软件开发包括导航算法、路径规划和决策等。
导航算法是AGV智能导航系统的核心。
基于传感器所获得的数据,导航算法能够分析环境和障碍物的位置,从而确定AGV应该如何移动。
常用的导航算法包括SLAM (Simultaneous Localization and Mapping)、A*算法等,它们能够帮助AGV进行精确的定位和导航。
路径规划是指确定AGV从起点到终点的最佳路径。
路径规划算法要考虑到环境中的障碍物和限制条件,并确保AGV能够安全、迅速地到达目的地。
常用的路径规划算法有Dijkstra 算法、A*算法等。
决策部分则是根据导航算法和路径规划算法的结果,对AGV的动作进行控制和调整。
决策算法需要根据不同的情况和目标,选择合适的控制策略和运动规划。
3. 实验验证和性能优化完成系统硬件设计和软件开发后,我们需要进行实验验证和性能优化。
实验验证是通过在实际环境中测试AGV智能导航系统的性能和可靠性。
agv小车工作原理
AGV(机器人导引车)是一种自主移动的机器人车辆,其工
作原理基于导航系统、感知系统和控制系统的协同工作。
导航系统是AGV的核心之一,它利用激光传感器、视觉传感
器或者无线信号等技术,对周围环境进行扫描和感知。
通过建立环境地图,AGV能够确定自身的位置和目标位置,并根据
导航算法规划最优路径。
感知系统是用于实时感知AGV周围环境的重要组成部分。
激
光传感器、红外传感器以及摄像头等设备能够获取到交通标志、路障和其他障碍物的信息,进而判断行驶路径上是否存在障碍物,以保证安全行驶。
控制系统则负责控制AGV的运动,通过实时调整车辆的速度、方向和制动等参数,实现准确的导航和自动化操作。
控制系统基于导航系统和感知系统提供的信息,对AGV进行路径规划
和运动控制,以实现按需运输、自动装卸和自动充电等功能。
AGV小车的工作过程可以简述为:首先,导航系统获取环境
地图和目标位置信息;然后,感知系统检测周围环境,判断是否有障碍物;最后,控制系统根据导航和感知信息,控制
AGV的行驶速度和方向,实现自动化移动和操作。
总而言之,AGV小车工作原理主要依赖于导航、感知和控制
系统之间的紧密协作,通过集成多种感知技术和自主导航算法,实现智能化、自主化的移动和操作能力。
AGVAGV是自动导引运输车(Automated Guided Vehicle)的英文缩写。
是指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,AGV属于轮式移动机器人(WMR――Wheeled Mobile Robot)的范畴。
更直接点:AGV就是无人驾驶(Driverless)的运输车。
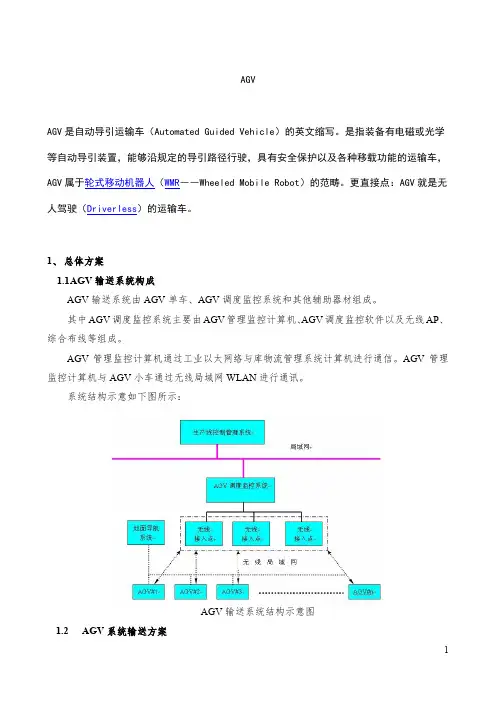
1、总体方案1.1 A GV输送系统构成AGV输送系统由AGV单车、AGV调度监控系统和其他辅助器材组成。
其中AGV调度监控系统主要由AGV管理监控计算机、AGV调度监控软件以及无线AP、综合布线等组成。
AGV管理监控计算机通过工业以太网络与库物流管理系统计算机进行通信。
AGV管理监控计算机与AGV小车通过无线局域网WLAN进行通讯。
系统结构示意如下图所示:AGV输送系统结构示意图1.2AGV系统输送方案运输过程示意图1.AGV在空闲区等待召唤;2.成品区需要发动机缸体时, 操作人员在呼叫终端呼叫AGV;3.AGV收到呼叫信号后,AGV自动前往半成品(发动机缸体装载区);4.到达半成品区后,AGV自动装载或者由操作人员人工装载发动机缸体,装载完成后操作人员点击AGV界面上的目的地“成品区”按钮,AGV自动前往成品区;5.AGV到达成品区后,AGV自动卸载或者由操作人员人工卸载发动机缸体,卸载完成后操作人员点击AGV界面上的“空闲区”按钮,AGV前往空闲等待区。
2、方案描述2.1AGV单车2.1.1AGV导引方式本AGV采用基于视觉引导方式,其基本工作原理为:在AGV的行驶路径上粘贴色带作为引导条,在关键节点粘贴二维码作为绝对位置标识,AGV在行驶过程中通过视觉传感器采集图像信息,并通过对图像信息的处理来识别AGV的当前位置,并对下一步的行驶做出规划。
视觉导引AGV相比电磁或光学等非接触自动导引方式,具有很高的识别精度,且路径设置简单、便于维护与改线、不受电磁场干扰、可以方便地识别多工位和路径分支、环境适应性更佳等诸多优点,特别适合于物流自动化和即时柔性生产组织管理。
AGV视觉导航技术研究进展一、AGV视觉导航技术的基本原理AGV视觉导航技术是利用摄像头、激光雷达等设备采集环境信息,并通过对信息的处理和分析,确定AGV在空间中的位置和姿态,从而实现对AGV的导航控制。
其基本原理可以分为三个步骤:环境感知、定位与建图、路径规划与控制。
环境感知是AGV视觉导航的第一步,通过摄像头和激光雷达等设备对周围环境进行感知,获取地标、障碍物等信息。
在此过程中,需要实时采集环境的数据,并对数据进行处理和分析,以实时更新环境地图和障碍物信息。
定位与建图是AGV视觉导航的核心步骤,通过对环境的感知数据进行处理和分析,确定AGV当前的位置和姿态。
在此过程中,需要建立环境地图,并将AGV的位置信息与地图进行匹配,从而实现对AGV的定位和建图。
1. 视觉SLAM技术的发展SLAM(Simultaneous Localization and Mapping)即同时定位与地图构建技术,是AGV 视觉导航技术的核心之一。
随着计算机视觉和机器人技术的不断发展,视觉SLAM技术在AGV导航中得到了广泛应用。
通过视觉SLAM技术,AGV可以在未知环境下进行自主导航,并实时构建环境地图,并实时对自身位置进行定位,从而实现对环境的感知与理解。
2. 深度学习在AGV视觉导航中的应用深度学习作为人工智能领域的热点之一,已经在AGV视觉导航技术中得到了广泛应用。
通过深度学习技术,AGV可以从传感器获取的数据中学习环境特征,并进行环境识别、目标检测等任务,从而实现对环境的感知和理解。
深度学习还可以用于AGV的路径规划与控制,通过深度学习算法对环境数据进行分析和处理,从而确定最优的运动路径和控制策略。
多传感器融合技术是AGV视觉导航中的关键技术之一,通过将不同传感器获取的数据进行融合处理,可以提高导航系统的鲁棒性和精度。
在AGV视觉导航中,常用的传感器包括摄像头、激光雷达、惯性导航等,通过融合多传感器信息,可以实现对环境的高精度感知和对AGV位置的精确定位。
AGV视觉导航技术研究进展随着自动化物流行业的迅猛发展,AGV(自动引导车)的应用得到了广泛的关注和应用。
AGV的视觉导航技术是其关键技术之一。
本文将介绍AGV视觉导航技术的研究进展。
AGV视觉导航技术是指AGV通过摄像头获取场地信息,并通过图像处理算法对场地进行分析和识别,从而得出车辆的位置、运动状态和行驶路径等相关信息,以实现车辆的自动跟随、避障、精确定位、路径规划等功能的技术,是AGV实现自主导航的基础技术之一。
1.图像处理算法的研究图像处理是AGV视觉导航的核心技术,其通过对图片的采集和图像处理算法的设计,实现图像的分析和识别,以获得车辆的位置、状态和环境信息等,以此实现车辆的导航和运动控制。
目前,研究者主要采用模式匹配、视觉特征、深度学习和神经网络等技术进行图像处理,以实现车辆的精确定位和避障等功能。
2.机器人学习技术的应用近年来,机器人学习技术在AGV视觉导航中的应用也逐渐得到了广泛关注。
机器学习技术能够通过训练机器人从大量数据中学习,以提高车辆的自主学习和决策能力。
目前,机器学习技术主要应用于车辆路径规划、动态障碍物识别和自适应运动控制等方面,以提高车辆的智能化和自主化程度。
3.基于RGB-D的三维建模技术基于RGB-D的三维建模技术是AGV视觉导航中的一项重要技术,它主要通过对场地进行三维重构,以提高车辆的空间感知能力。
当前,研究者主要采用基于深度传感器的相机,通过获取场地的深度信息和纹理信息实现点云数据的三维重构,以提高车辆的精确定位和空间感知能力,从而实现车辆的精准定位和路径规划。
AGV视觉导航技术的应用场景主要包括以下几个方面:1. 物流仓储场景:在物流仓储场景中,AGV通常会在重复性高、环境复杂度低的场景中进行物料转移,主要应用于自动化物料运输和搬运。
2. 生产车间场景:在生产车间场景中,AGV主要应用于工件上下料、设备维护和零件装配等工艺流程中的各种自动化操作。
3. 医疗领域场景:在医疗领域场景中,AGV主要应用于无菌物品的运输,如手术器械、污染物和医药品等。
AGV视觉导航技术研究进展随着工业自动化程度的不断提高,自动引导车(AGV)在物流、制造等领域的应用越来越广泛。
而视觉导航技术作为AGV导航的重要组成部分,其研究一直备受关注。
本文将就AGV视觉导航技术的研究现状及进展进行探讨。
一、AGV视觉导航技术的意义自动引导车(AGV)是一种能够在没有人工干预的情况下完成货物搬运、装卸、运输等任务的车辆。
在现代制造业和物流业中,AGV的应用可以大大提高生产效率和物流效率,减少人力成本,提高安全性。
而AGV的导航技术则是其核心技术之一,保障了AGV在工作中的稳定性和精准性。
视觉导航技术是AGV导航技术中的一种重要技术手段,通过图像识别和处理,使AGV在工作中能够准确地识别和理解周围环境,从而实现精准导航。
AGV视觉导航技术的研究已经取得了一系列进展,主要体现在以下几个方面:1. 高精度的图像识别和处理技术由于AGV在导航过程中需要通过摄像头获取周围的环境信息,因此高精度的图像识别和处理技术是其视觉导航的基础。
目前,随着深度学习、人工智能等技术的不断发展,图像识别和处理技术已经取得了长足的进步。
通过卷积神经网络(CNN)等技术,AGV可以准确地识别出道路、障碍物、标识等信息,从而更加精确地进行导航。
2. 实时定位和路径规划技术AGV在导航过程中需要进行实时的定位和路径规划,确保其能够稳定、高效地完成任务。
目前,基于视觉的实时定位和路径规划技术已经取得了一定的进展。
通过结合SLAM技术(Simultaneous Localization and Mapping,即同时定位与地图构建)和深度学习技术,AGV可以实时地获取周围环境的信息,并根据自身位置和目标位置进行智能路径规划,大大提高了导航的精准度和效率。
3. 多传感器融合技术在实际的导航场景中,AGV需要同时使用多种传感器获取环境信息,如摄像头、激光雷达、红外传感器等。
而多传感器融合技术可以将不同传感器获取的信息进行智能融合,提高了环境感知的全面性和准确性。

基于惯导和视觉定位的AGV仓储机器人作者:朱士光张帆张聪来源:《中国新技术新产品》2018年第03期摘要:采用惯性导航和视觉导航组成的组合导航模式,惯性导航,应用惯性元件(加速度计)来测量机器人自身的加速度,经过积分运算得到速度和位置,从而达到对机器人导航定位的目的。
组成惯性导航系统的设备都安装在机器人体内,工作时不依赖外界信息,抗干扰能力很强,是一种自主式导航系统;视觉导航是在地面上利用颜色反差较大的色带对 AGV 小车的行驶路径进行规划,AGV 上安装的摄图传感器将不断拍摄的图片传送给中央控制单元,通过与存储图片进行对比,输出偏移量信号给驱动控制系统,从而纠正 AGV 的行驶路径,实现AGV 的导航。
而惯性导航是利用陀螺仪等传感器实时获取车辆的运行状态,结合图像信息,实时做出判别和命令,以达到无人运输的目的。
关键词:惯性导航;角速度计;加速度传感器;陀螺仪;视觉导航中图分类号:V249 文献标志码:A0 引言随着仓储物流的日益发展以及劳动力成本的不断提高,智能化、自动化生产已成为不可阻挡的发展趋势。
因此,越来越多的企业开始着手研究和应用AGV。
目前,国内外AGV应用的导航系统原理主要有电磁导航、磁带导航、激光导航和二维码导航。
电磁导航出现时间较长,应用比较广泛,但是在应用过程中改变或扩充新路径比较烦琐。
磁带导航技术工作原理与电磁导航相似,缺点也很明显,磁带维护频率较高,而且损坏严重的磁带要及时更换。
激光导航相比其他导航方式则比较先进,AGV小车定位也更加精确,行驶路径可以随意改变。
但由于其控制比较困难,而且激光技术安装昂贵致使成本过高。
二维码导航技术出现较晚,视觉机器人就是基于视觉识别二维码和惯性导航的一种智能仓储机器人,将其作业范围做成一个相当于围棋棋盘的地图,机器人就可以到达范围内的所有点。
本文设计的惯性导航是利用陀螺仪等传感器实时获取车辆的姿态,结合图像信息,实时做出判别和命令,以达到无人运输的目的。
International Forum on Energy, Environment Science and Materials (IFEESM 2017)The Application of QR Codes And WIFI Technology in the AutonomousNavigation System for AGVChuanhong Zhou1,a, Pujia Shuai1,b and Chao Dai1,c1 Department of School of Mechatronic Engineering and Automation, Shanghai University, Shanghai200072, P.R.China.a138****************,b****************,c***************** Keywords: QR code, AGV, path planning, positioning informationAbstract. With the development of Internet, the two-dimensional code technology has been widely used. It is a technology which includes information coding, information transmission, images processing and data encryption. And it develops from one-dimension bar code. It can realize rapid positioning and automatic navigation because of the functions above. The static path planning and dynamic path planning are adapted when the map of AGV is built. At the same time, this system also adapts the WIFI positioning technology to avoid missing the two-dimensional code. IntroductionAGV (automatic guided vehicle) applied in industry can achieve the goal of unmanned and work through computers. Aimed at the problem of positioning accuracy and costs mentioned, this paper will introduce QR codes technology[1]. How AGV to achieve rapid positioning?(1) First, post the two-dimensional code label on the ground. And the positioning information is stored in the label.(2) Second, when the AGV passes the area, it will scan and analysis the two-dimensional code through the camera comes with AGV.QR code (abbreviated from Quick Response Code) is the trademark for a type of matrix barcode. The basic structure of QR codes[2] is shown as Fig. 1:Fig. 1. The basic structure of QR codesThe position detection pattern is a positioning pattern used to mark the rectangular size of a two-dimensional code. The white edges of the three positioning patterns are called position probe pattern separators. These three position detection patterns form a square with the non-probing pattern in the lower right corner. The order from top left to top right is: 0, 1, 2, 3.However, when AGV is driving, there exists some positioning deviation because of some uncontrollable factors. So, this system also adapts WIFI positioning technology.Positioning designThe design idea of this paper is that we use the scanning module to scan the two-dimensional code coordinate information posted on the ground and then send the information processed by a certain algorithm to AGV control system[3]. Finally we will use the control module to guide the nextoperation of AGV. The operation needs to read the information of two-dimensional code and measure the distance from AGV to the code, as well as obtain the position determination of AGV. The specific flow chart is shown as Fig. 2:Fig. 2. The flow chart of AGV’s positioning scheme The control system of AGV is divided into three parts which are upper control management scheduling system[4], local control system of AGV and navigation system. The relationship between them is shown as Fig. 3:Fig. 3. System block diagramIn the above figure, the core control modules mainly include two parts which are motion control module and the algorithm processing of two-dimensional code. They are responsible for processing of the scanned result and controlling the movement of AGV. The reader/writer module of two-dimensional code is used to obtain the positioning information of the QR code labels which are posted on the ground according to the arrangement of the ranks. QR codes are widely used in our country, so we generate the two-dimensional code according to QR code standard.The acquisition of the two-dimensional code’s information. In order to ensure the organic integration of generation module and system, this system uses open source library (ZXing)[5] to produce QR code. ZXing can improve the efficiency of developing system and generate QR codes in quantities.The special meaning of two-dimensional codes. In order to avoid collision when AGV is driving, we need to set a mark in the non-traveling area. This paper adapts the way of stacking some special two-dimensional codes in the non-driving areas. We can let the AGV stop to avoid collision because of the “Obstacle” being stored in the two-dimensional codes[6]. AGV will transmit the alert information to the control system and guide AGV to make corresponding obstacle avoidance behavior when the special two-dimensional code is scanned.The planning and design of the path.The AGV described in this paper is applied in the industrial unmanned warehouse, where the movement is the driving area. The path planning of AGV under intelligent control has two forms[7], which includes path planning under static environment and under dynamic environment. They will be described in detail below.(I)Path planning under static environment. The path planning under static environment is assumed that the robot is aware of the environment through path perception and the local area propagation algorithm is adopted. Therefore, this path is usually used in the environment when there are static known obstacles. However, a problem needs to be solved is what kind of path can be considered reasonable. This paper adapts the type which not only has the property of continuity but also can maintain the continuity in the tangential direction.(II) Path planning under dynamic environment. The path planning under dynamic environment[8] is different from the path planning under static environment. We cannot obtain much information andoptimal path planning due to the environmental changes. The target attraction, dynamic security and time constraint must be considered under complex environment no matter what kind of performance should be applied.This paper uses the two-dimensional code to locate and navigate for AGV, so the different codes are posted on the driving path of AGV. The specific ideas of path planning are as follows: The distance of two-dimensional codes should be increased when AGV is on the straight path[9]. But the distance should be narrowed down when AGV is on the turning path. It will allow AGV to update its location and drive in accordance with the specified path, so as to complete the planning path on turning path.Experimental resultsThe position of two-dimensional code is shown as Fig. 4 and the results read by program is shown as Fig. 5.Fig. 4. Position Fig. 5. The results read by program We use notebook as the host machine and the communication between AGV and PC are shown as Fig. 6 and Fig. 7:Fig. 6. The testing data Fig. 7. The responding data from PC The testing data include the position information of two-dimensional codes and the relative position between the codes and AGV.The scanned real-time position information of two-dimensional codes is transmitted to the host machine, and then the PC feed the information back to AGV through the control module of it. Finally, we will realize the autonomous navigation of AGV[10]. The figure of the movement for AGV is shown as Fig. 8.Fig. 8. The figure of the movement for AGVConclusionsThis system solves the problem of low positioning accuracy and high costs with the help of the combination of QR 2D code and machine vision. The information of QR 2D code is scanned by ZXing. The orientation of AGV related to two-dimensional code is determined by the design principle and the scanned technology of the two-dimensional code.The outside light has a certain influence on the scanning speed of two-dimensional code because of the system adopts the machine vision to identify the QR 2D code. Therefore, the QR 2D code[11] may be missed and it will lead to the inaccuracy of the positioning information.AcknowledgementsThis work is supported by subject of Science and Technology Commission of Shanghai Municipality in key technology development and demonstration application of the unmanned factory for industrial robot production (No. 14DZ1100700). We thank Shanghai Key Laboratory of Intelligent Manufacturing and Robotics for assistance with the automotive parts cost data.References[1] Rothwell C A;Zisserman A;Forsyth D A Using projective invariants for constant time library indexing in model based vision 1991.[2] S. Willis,S. Helal, A Passive RFID Information Grid for Location and Proximity Sensing for the Blind User. University of Florida Technical Report, Oct. 2004.[3] Jun Yang, Yan Liu, Yanrui Du. The research and application of two dimensional code[J] Applied science and technology,2002,29(11): 11-13.[4] Beijing Lingdong kuaipai Information Technology Co. Ltd. Snapshot two-dimensional code [EB/OL]. [2013 - 04 -12].[5] QR wizard QRCode turn chemical [EB/OL]. [2013 -04-12].[6] "Information capacity and versions of QR Code". Denso-Wave.[7] Sebastián Campanario (16 September 2011). "Marketing futurista: ya se puede comprar con la cámara del celular" [Futuristic marketing: it's already possible to purchase with a cellphone's camera] (in Spanish).[8] "QR Code Overview & Progress of QR Code Applications" (PDF). Retrieved 26 June 2014.[9] "Malicious Images: What's a QR Code". SANS Technology Institute. 3 August 2011. Archived from the original on 2012-07-13. Retrieved 31 August 2011.[11] ISO/IEC 18004:2006(E) § 6.4 Data encoding; Table 3 — Number of bits in character count indicator for QR Code 2005.。
AGV视觉导航技术研究进展自动导引车(AGV)是一种能够自主运动的物流设备,其应用范围广泛,从物料的存储和运输到生产线的装配和包装。
AGV的核心技术是导航,能够帮助AGV自主运动,从而实现自动化和智能化的物流操作。
随着AGV的广泛应用,视觉导航技术逐渐成为AGV导航技术的研究热点。
本文将介绍AGV视觉导航技术的研究进展,包括其技术原理、关键技术、应用现状和未来发展方向。
一、 AGV视觉导航技术的技术原理AGV视觉导航技术是一种基于计算机视觉的导航技术,利用摄像机采集地面图片,将其发送给计算机进行处理,得到地图和机器人的位置信息,从而实现机器人的导航。
其原理如下图所示:首先,摄像机拍摄地面图片并将其送到计算机上。
计算机利用图像处理算法,通过边缘检测、特征提取、图像匹配等步骤,识别当前位置的地图和机器人的位置。
接下来,机器人依据识别出的地图和位置信息,生成运动路径,完成导航任务。
AGV视觉导航技术的关键技术包括地面图片的采集、图像处理算法、机器人定位算法和运动规划算法。
1.地面图片的采集地面图片的采集是AGV视觉导航技术的前提,准确的地面图片是实现机器人定位和导航的关键。
目前,常用的地面图片采集方法有RGB相机、深度相机、激光雷达等。
2.图像处理算法图像处理算法是AGV视觉导航技术的核心。
常用的图像处理算法包括边缘检测、特征提取和图像匹配。
边缘检测算法用于检测地面图片中的边缘信息,特征提取算法用于提取地面图片的特征点,图像匹配算法用于将当前地面图片与地图库中的地图进行匹配。
3.机器人定位算法机器人定位是指确定机器人当前所处的位置和姿态。
机器人定位算法是AGV视觉导航技术的重要组成部分,其目的是将机器人的运动姿态与地图中的坐标系进行对齐。
目前,常用的机器人定位算法有SLAM算法、单目定位和多目定位算法等。
4.运动规划算法运动规划是指根据机器人的当前位置和目标位置,确定机器人的行动路径和速度,以最优的方式完成导航任务。