试述圆感应同步器测量角度的基本原理
- 格式:docx
- 大小:225.21 KB
- 文档页数:2

感应同步器工作原理及应用摘要:感应同步器是利用电磁原理将线位移和角位移转换成电信号的一种装置。
根据用途,可将感应同步器分为直线式和旋转式两种,分别用于测量线位移和角位移线。
将角度或直线位移信号变换为交流电压的位移传感器,又称平面式旋转变压器。
它有圆盘式和直线式两种。
在高精度数字显示系统或数控闭环系统中圆盘式感应同步器用以检测角位移信号,直线式用以检测线位移。
感应同步器广泛应用于高精度伺服转台、雷达天线、火炮和无线电望远镜的定位跟踪、精密数控机床以及高精度位置检测系统中。
关键词:感应同步器、原理、应用、直线式、旋转式Abstract:The inductosyn is a system that transform the linear and angular displacement into electric signal use the Electromagnetic theory.According to its use the inductosyn can be divided into the linear and the rotary,which is use to measure the linear and the angular.The linear inductosyn that transform the linear and angular displacement into AC V oltage is called plane rotary transformer,which is divided into two types than is the linear and the disc.In the precision digital display system or CNC closed-loop system,the disc inductosyn is used to measure the signal of angular and the linear inductosyn is used to measure the signal of linear.The inductosyn is also widely used in the location tracking ,the precision CNC machine tools and thehigh-precision position detection system of the precision servo turntable, the radar antenna, the artillery and the radio Telescope.Keywords: inductosyn theory use linear rotary1.感应同步器的工作原理感应同步器是利用两个平面形绕组的互感随位置而变化的原理而进行工作的。
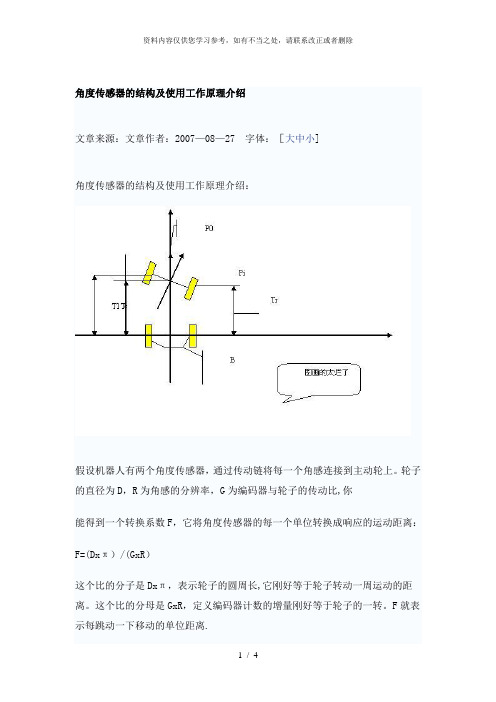
角度传感器的结构及使用工作原理介绍文章来源:文章作者:2007—08—27 字体:[大中小]角度传感器的结构及使用工作原理介绍:假设机器人有两个角度传感器,通过传动链将每一个角感连接到主动轮上。
轮子的直径为D,R为角感的分辨率,G为编码器与轮子的传动比,你能得到一个转换系数F,它将角度传感器的每一个单位转换成响应的运动距离:F=(Dxπ)/(GxR)这个比的分子是Dxπ,表示轮子的圆周长,它刚好等于轮子转动一周运动的距离。
这个比的分母是GxR,定义编码器计数的增量刚好等于轮子的一转。
F就表示每跳动一下移动的单位距离.机器人使用最大的轮子,它的直径是81。
6mm。
角度传感器每一转有16的分辨率,她与轮子的传动比是1;5(轮子转动一圈,角度传感器转动5圈)。
结果是:F=81.6mmx3.1416/(5x16ticks) 3.2mm/tick就是说每次传感器计数一次,轮子就会运动3.2mm。
在任何给定的时间间隔,左轮运动的距离TL等于角度传感器计数的增量IL乘以系数FTL=ILxF同样,对右轮:TR=IRxF机器人的中心点,就是在连接两轮的的中线上的一点,它移动的距离是TCTC=(TR+TL)/2为了计算方向ΔO的变化你需知道机器人的另一个参数,轮子间的距离B,或更精确一点,轮子与地接触的那两点间的距离。
ΔO=(TR–TL)/B这个公式返回的值ΔO是弧度,使用下面的关系式将弧度转变为角度。
ΔODegrees=ΔORadiansx180/π你现在可以计算机器人的相对方位,在I时刻的新方位ΔO是建立在I—1时刻的方位变化ΔOO是机器人所指的方位,为ΔO选择同样的单位的结果是:Oi=Oi—1+ΔO同样的,新的中心点卡迪尔坐标是根据前一中心点移动距离的增量:xi=xi-1+TCxcosOiyi=yi-1+TCxsinOi这两个三角函数把移动距离的矢量表示转换成卡迪尔坐标。
不幸的是,在进行定位时你无法除去三角式中角度O,还好,有些特殊的情况,你可以避免三角函数,比如,当机器人在某个位置精确的转动90度,并按照你所期望的笔直往前走.在这种情况下,x或y有一个是常量,其它运动距离的增量TC 也同样.使用双差速齿你只需要一个角度传感器,安装在左或右轮上.这个机械结构保证了当一个马达打开时机器人直线驱动,当另一个马达打开时机器人就转弯,在第一种情况下,角度传感器,角度传感器将会测量小车运动的直线距离T而在第二中情况下,你必须要根据角度传感器C,的增量让它以90度的倍数旋转。

角度传感器的工作原理
角度传感器是一种用来测量物体相对于参考方向的角度的设备。
它通过检测物体的旋转运动来确定角度的改变。
角度传感器的工作原理基于不同的原理,其中最常见的是光学原理和磁学原理。
光学角度传感器使用光学元件,例如光栅或编码盘,来测量物体的旋转角度。
当物体发生旋转时,光学元件会产生相应的光信号。
这些信号经过处理后,可以转换为角度值。
磁学角度传感器利用磁场的变化来测量角度。
传感器内部包含了磁铁和传感器头。
磁铁被安装在被测物体上,而传感器头则位于磁铁附近。
当物体旋转时,磁场的变化会引起传感器头产生电压信号。
通过分析这些信号,可以确定角度的改变。
无论是光学还是磁学角度传感器,其最终都需要将信号转换为数字或模拟信号,并通过电路进行处理和解码,最终得到角度值。
角度传感器广泛应用于各种领域,如航空航天、汽车工业、工业自动化和机器人技术等。
它们在测量转角、控制位置和导航定位等方面发挥着重要的作用。

高精度测角系统及编码器 -- 圆感应同步器设备概述:高精度测角系统及编码器的传感探头是圆感应同步器,圆感应同步器是一种电磁感应位置检测元件,由定、转子两个分部件组成,通过定、转子多极平面绕组的互感随位置变化的电磁感应原理实现高精度角度测量。
圆感应同步器是一种以金属为基体的传感元件,从而使得基于它的整个测角系统具有极高的可靠性,基于圆感应同步器的高精度测角系统的特性主要体现在如下几个方面:(1)测角精度高,可达到±3″(峰峰值6″)。
(2)对温度的影响不敏感,可在-40°~+85°的温度范围内工作,其中传感器探头部分可承受不低于-55°~+100°的工作温度。
(3)耐强冲击,振动。
(4)耐真空,可在1×10-3Pa的真空环境下正常工作。
(5)耐油、液体、灰尘、污垢、盐雾等。
鉴于圆感应同步器的诸多优点,基于它的测角系统在国外历来为军方角度传感器的首选,尤其在美、日、欧等发达国家的航空航天领域被广泛应用。
世界闻名的哈勃望远镜内部就采用了圆感应同步器作为角度传感元件。
基于圆感应同步器的高精度测角系统及编码器可广泛应用在如下领域:回转工作台、各类机床设备、惯导测试转台、电机、天文望远镜、惯性导航系统等。
设备结构:一、测角系统测角统包括传感探头以及处理电路(含测角盒与前放盒)两个部件,传感探头即圆感应同步器,其基体为铝材,又包括定子、转子两部分,其中定子安置在固定位置上,转子安装在旋转轴上,通过转子与定子的相对旋转运动所引起的电磁信号变化进行角度的测量。
测角系统工作时,输出代表角度值的RS422串口信号(或A、B、Z相脉冲信号),传感器每周有一个机械绝对零位(选择RS1或ZS1触发通信模式即可实现此功能)。
主要性能指标:(1)测角精度:±3″~±15″(峰峰值6″~30″)(2)转角范围:360°连续(3)工作温度:0℃~50℃(C级);-20℃~55℃(I级)1.1系统组成图1.1 测角系统组成图1.2产品使用说明及参数规格表1、传感器探头;2、线缆L1;3、线缆L2;4、前放盒;5、线缆L3;6、测角盒;7、线缆L4。

角度传感器原理
角度传感器是一种用于测量物体角度的装置。
它的工作原理基于光学、电阻、电感或霍尔效应等物理原理。
光学角度传感器利用了物体的旋转对光传感器输出信号产生影响的原理。
光传感器通过探测光线的强度变化来测量角度。
通常使用旋转的圆盘或光栅来改变光线的通量,从而通过读取光传感器输出信号的变化来计算角度。
电阻角度传感器基于变阻原理工作。
它在转子和定子之间放置了一个可变电阻元件,当转子旋转时,电阻值会随之变化。
通过测量电阻值的变化,就可以计算出转子的角度。
这种传感器结构简单、成本较低,但精度较低,适用于一些对精度要求不高的应用。
电感角度传感器利用了磁场对线圈电感值的影响。
当转子旋转时,磁场的变化会导致线圈的电感值发生变化,通过测量电感值的变化,就可以计算出转子的角度。
这种传感器的精度较高,但也相对较贵。
霍尔效应角度传感器基于霍尔元件产生的霍尔电压的变化来测量角度。
霍尔元件是一种能够感知磁场的器件,通过测量霍尔电压的变化,可以判断磁场的方向和强度,从而计算出角度。
这种传感器具有灵敏度高、响应速度快的特点,广泛应用于需要高精度角度测量的领域。
总而言之,角度传感器的工作原理可以是光学、电阻、电感或
霍尔效应等物理原理。
选择合适的角度传感器取决于具体应用的要求,包括精度、响应速度、成本等方面。

感应同步器的组成和原理感应同步器的组成和原理2009年10月22日感应同步器分为直线型和旋转型两大类,直线型由定子和滑尺组成,用于检测直线位移,旋转型由定子和转子组成,用于检测旋转角度。
本节仅介绍直线型感应同步器的组成和原理:如图3 15所示,直线型感应同步器由定尺和滑尺组成。
其定尺是单向均匀感应绕组,绕组节距 2 T通常为2mm。
滑尺上有两组励磁绕组,一组称为正弦绕组,另一组为余弦绕组,两个绕组的节距与定子相同,在空间上相互错开 1 /4节距,于是两个励磁绕组之间相差90°电角度。
滑尺安装在被测的移动部件上,滑尺与定尺相互平行,并保持一定的距离,约0.2〜0.3mm 向滑尺通以交流励磁电压,在滑尺中产生勋磁电流,绕组周围便产生按正弦规律变化的磁场。
由电磁感应在定尺绕组上产生感应电压,当滑尺和定尺间产生相对位移时,由于电磁磁耦合强度的变化,就使定尺上的感应电压随位移的变化而变化。
定尺图3 -15直线型感应同步器1 -正弦励磁绕组2—余眩励建绕组、感应同步器种类和特点l感应同步器的种类感应同步器有测量长度用的直线式和测量旋转角度用的旋转式两种。
下面着重介绍直线式••(1) 标准式:是直线式中精度最高的一种,使用最广,在数控系统和数显装置中大量应用:常用型号为GZD —1 和GZH —1 型。
(2) 窄长式:其定尺的宽度比标准式窄,用于精度较低或机床上安装位置窄小且安装面难以加工的情况。
(3) 三重式:它的滑尺和定尺上均有粗、中、细:套绕组.定尺上粗中绕组相对位移垂直方向倾斜不同角度,细绕组和标准式的一样。
滑尺上的粗、中、细三套绕组组成:个独立的电气通道,粗、中、细的极距分别是4000、100和2mm 三通道同时使用即可组成一套绝对坐标测量系统,测量范围为0 .002〜2000mm 在此测量范围内测量系统只有一个绝对零点。
单块定尺的长度有200和300mm 两种,它特别适用于大型机床、。
(4) 带子式:它的定尺绕组是印制在 1.8m 长的不锈钢带上,其两端固定在机床床身上(一端用弹性固定)滑尺像计算尺的游框那样跨在带状定尺上,可以简化安装,减少安装面,而且能使定尺随机床床身热变形而变形。
幻灯片1第3章角度及角位移测量3.1概述3.2单一角度尺寸的测量3.3圆分度误差的测量3.4角位移的测量3.5角度测量实例幻灯片23.1概述●一、角度单位及量值传递●我国法定计量单位制中规定的角度计量单位为秒(ʺ)分(ʹ)度(°)和弧度(rad)两种●前者是国家选定的非国际单位制单位,在机械制造和角度测量中被普遍采用●后者是国际单位制的辅助单位,常用于计算59幻灯片3●二、角度的自然基准和圆周封闭原则●角度的自然基准是360°圆周角,这是一个没有误差的基准●在圆周分度器件(刻度盘、圆柱齿轮)的测量中,利用在同一圆周上所有分度夹角之和等于360°,即所有夹角误差等于零的自然封闭特性,在没有更高精度的圆分度基准器件的情况下,采用“自检法”也能达到高精度测量目的●圆周封闭原则即要求在圆分度测量中充分利用这一自然基准●和长度测量中的阿贝原则一样,圆周封闭原则是圆分度测量的重要原则59幻灯片4●三、角度的实物基准●常用的圆分度标准件如下:● 1.高精度度盘●度盘刻度线的角间隔为5ʹ、10ʹ等,通过细分可达很高的角分辨力● 2.圆光栅●圆光栅等除了可实现角度的静态测量,还可实现角度的动态测量●圆光栅一般为黑白透射光栅。
因存在平均效应,光栅的刻线误差对测量结果影响很小,光栅盘的分度精度可达±0.2ʺ或更高。
光栅盘的分辨力多为10ʺ、20ʺ59幻灯片5● 3.圆感应同步器●圆感应同步器的励磁绕组印制在固定圆盘上,工作时固定不动;感应绕组印制在旋转圆盘上,包含sin和cos绕组。
当动盘相对于固定盘旋转时,输出两路信号,便于信号的进一步处理●圆感应同步器的径向导线数(也称极数)有360、720、1080等多种,相应的节距角为2°、1°、40ʹ圆感应同步器绕组布线示意图a)固定圆盘b)旋转圆盘59幻灯片6● 4.角编码器●将角位置定义成数字代码的装置称作角编码器,其结构如图所示●编码盘大多用光学玻璃制成,其上刻有许多同心码道,每个码道均有若干段亮道和若干段暗道,并按预定规律排列。
感应同步器的工作原理
感应同步器
感应同步器是一种电磁式位置检测元件,按其结构特点分为直线式和旋转式(圆盘式)两种。
直线式感应同步器由定尺和滑尺组成;旋转式感应同步器由定子和转子组成。
前者用于测量直线位移,用于全闭环伺服系统,后者用于测量角位移,用于半闭环伺服系统。
它们的工作原理都与旋转变压器相似。
感应同步器的工作原理
感应同步器是利用励磁绕组与感应绕组间发生相对位移时,由于电磁耦合的变化,感应绕组中的感应电压随位移的变化而变化,借以进行位移量的检测。
见图所示。
感应同步器滑尺上的绕组是励磁绕组,定尺上的绕组是感应绕组。
。
4试述圆感应同步器测量角度的基本原理。
答:感应同步器是利用两个平面形绕组的互感随位置而变化的原理而进行工作的。
(1)旋转式感应同步器的结构
旋转式感应同步器(也称圆感应同步器)的结构如图2-1所示。
定转子都由基板、绝缘层和绕组构成。
在转子(定子)绕组的外面都包有层与绕组绝缘的接地屏蔽层。
基板成环型,材料为硬铝、不锈钢或玻璃。
绕组用铜做成,厚度在0.05mm 左右。
屏蔽层用铝箔或铝膜做成。
转子为分段式,如图2-2所示,它由有效导体、内端部和外端部构成。
有效导体共有N根。
N就是旋转式感应同步器的极数。
定子绕组做成连续式的,如图2-2所示。
绕组由2K组导体组组成,它们分别属于A相和B相。
K称为一相组数。
每组由M根有效导体及相应的端部串联构成。
属于同相上的各组,用连接线连成一相。
定、转子有效导体都成辐射状。
导体之间的间隔可以是等宽的,也可以是扇条形。
(2)工作原理
旋转式感应同步器与直线式感应同步器的工作原理是相同的。
为了分析方便,将旋转式感应同步器的绕组也展开成直线排列,如图2-6所示。
其中,定尺(定子) 为连续绕组,滑尺(转了)为分段绕组,分别设图中的两相分段绕组为A 相和B 相。
连续绕组两相邻导体中心线之间的距离称为极距,以符号τ表示。
在标准型直线感应同步器中,τ=1mm 。
在旋转式感应同步器中,随半径的不同,极距是变化 的。
在此只论述旋转式感应同步器的工作原理,直线式感应同步器工作原理就不再详细论述。
感应同步器的工作原理和旋转变压器的工作原理相同,滑尺的两个励磁绕组通以励磁电压,滑尺与定尺相对移动时,在定尺上便产生感应电压,感应电压随位移的变化而变化。
设当滑尺上的正弦绕组与定尺绕组重合时,此时绕组完全耦合,感应电压最大。
滑尺相对定尺相对滑动时,感应电势逐渐变小,在错开1/4 节距时,感应电压为零。
再继续移动1/2节距时,得到的电压值与开始位置大小相同但极性相反。
随后感应电压在3/4节距d 点又变为零,在移动一个节距到e 点时,电压幅值与a 点时相同。
这样滑尺在移动一个节距的过程中,感应电压变化了一个余弦波形。
同理因余弦绕组与正弦绕组错开1/4个节距,即n/2的相位角,由余弦绕组励磁在定尺上产生的感应电动势应按正弦规律变化。
定尺上的总感应电势,是上述两个感应电势的线性叠加。
定尺和滑尺绕组的节距都是2τ=2mm ,当两尺相对移动2τ后,感应电势以余弦或正弦规律变化。
当相对移动距离为x 时,则对应的的感应电压将变化为一个相位角θ,由比例关系
τ
πθ2x 2= 可得 τ
πθx =。