模糊控制在氯化钾氨生产中的应用
- 格式:pdf
- 大小:284.09 KB
- 文档页数:3

模糊控制理论及工程应用模糊控制理论是一种能够处理非线性和模糊问题的控制方法。
它通过建立模糊规则和使用模糊推理来实现对系统的控制。
本文将介绍模糊控制理论的基本原理,以及其在工程应用中的重要性。
一、模糊控制理论的基本原理模糊控制理论是由扬·托东(Lotfi Zadeh)于1965年提出的。
其基本原理是通过建立模糊规则,对系统的输入和输出进行模糊化处理,然后利用模糊推理来确定系统的控制策略。
模糊规则是一种类似于“如果...那么...”的表达式,用于描述输入和输出之间的关系。
模糊推理则是模糊控制系统的核心,它通过将模糊规则应用于模糊化的输入和输出,来确定控制的动作。
二、模糊控制理论的工程应用模糊控制理论在工程应用中具有广泛的应用价值。
下面将分别介绍其在机械控制和电力系统控制中的应用。
1. 机械控制模糊控制理论在机械控制领域有着重要的应用。
其优势在于能处理非线性和模糊问题,使得控制系统更加鲁棒和稳定。
例如,在机器人控制中,模糊控制可实现对复杂环境的适应性和灵活性控制,使机器人能够自主感知和决策。
此外,模糊控制还可以应用于精密仪器的控制,通过建立模糊规则和模糊推理,实现对仪器位置和姿态的精确控制。
2. 电力系统控制模糊控制理论在电力系统控制领域也有着重要的应用。
电力系统是一个复杂的非线性系统,模糊控制通过建立模糊规则和模糊推理,可以实现对电力系统的稳定性和性能进行优化。
例如,在电力系统调度中,模糊控制可以根据不同的负荷需求和发电能力,实现对发电机组的出力控制,保持电力系统的稳定运行。
此外,模糊控制还可以应用于电力系统中的故障诊断和故障恢复,通过模糊推理,快速准确地定位和修复故障。
三、总结模糊控制理论是一种处理非线性和模糊问题的有效方法。
其基本原理是通过建立模糊规则和使用模糊推理来实现对系统的控制。
模糊控制理论在机械控制和电力系统控制等工程领域有着广泛的应用。
它能够提高控制系统的鲁棒性和稳定性,并且能够适应复杂的环境和变化,具有良好的控制效果。

模糊控制在磨矿分级自动控制中的应用矿分级作为物料在经过分级处理后得到不同规格的产品,其中自动控制是非常重要的一环。
近年来,随着电子技术、模糊技术、网络技术的发展,模糊控制在各行各业的自动控制中有着广泛的应用,其中也包括磨矿分级自动控制。
糊控制的本质是将控制对象的输入变量和输出变量之间的影响关系表示为模糊规则,再将模糊规则进行混合推理,最后根据指定的基准值(如期望的系统输出等)得到系统的控制输出。
通过这样的方法,可以有效抑制复杂系统中不确定变量、内在联系和模型等因素对控制系统动态响应的影响,其自适应控制特性更加强大,可以使系统具有良好的鲁棒性。
糊控制在磨矿分级自动控制中的应用可以更好的满足实际情况的要求。
首先,由于磨矿过程中的物料构成可能会发生变化,物料的粒度变化率可能也会有所变化,这些现象会对磨矿分级的效果产生较大的影响。
而模糊控制则可以有效的应对这样的现实情况,因为它具有自适应能力,可以将系统的控制参数实时调整,从而达到更好的控制效果。
,在磨矿分级过程中还要考虑到产出物料的精度问题,物料之间粒度的差异不宜太大,需要控制精度在一定的范围之内。
这对磨矿分级控制系统的设计也提出了更高的要求。
而模糊控制的自适应性质可以有效的降低随着环境数据变化而带来的控制调整量,从而达到一个比较平稳的产品粒度控制效果。
外,由于模糊控制本身具有较强的自适应特性,它可以从多个角度对控制参数进行调整,当出现异常时可以有效的抑制系统对异常参数的反应,从而保证分级输出物料的稳定性和质量。
此外,模糊控制还可以更好的把握最优控制,有效的解决磨矿分级过程中存在的抗干扰能力的问题,以及物料粒度变化太快的问题,从而更好的满足高要求的分级需求。
上所述,模糊控制在磨矿分级自动控制中的应用确实具有重要的意义,它可以有效的解决磨矿分级过程中存在的复杂性问题,为物料获得规格均匀的分级结果提供保证。
通过模糊控制,可以达到更加高效的控制效果,从而更好的满足物料分级的要求。

模糊控制在电机驱动系统中的应用模糊控制是一种智能控制方法,广泛应用于各种工程领域中。
在电机驱动系统中,模糊控制技术能够有效地提高系统性能,实现精确的驱动输出。
本文将介绍模糊控制在电机驱动系统中的应用,并探讨其优势及潜在的改进空间。
一、模糊控制原理及基本结构模糊控制是一种基于模糊逻辑的控制方法。
与传统的PID控制相比,模糊控制能够处理非线性、不确定性和模糊性等复杂问题。
其基本结构包括模糊化、模糊推理和解模糊三个步骤。
首先,通过模糊化技术将输入量和输出量转化为模糊集合;然后,基于模糊规则和推理机制进行决策和控制;最后,通过解模糊操作将模糊输出转化为具体的控制信号。
二、模糊控制在电机驱动系统中的应用1. 速度控制在电机驱动系统中,实现精准的速度控制是非常重要的。
传统的PID控制方法在面对非线性负载和传感器误差时可能无法满足要求,而模糊控制则能够更好地适应这些复杂情况。
通过将实际速度和期望速度进行模糊化处理,利用模糊规则确定控制动作,可以实现更为精确的速度调节。
2. 位置控制电机驱动系统中的位置控制是一种高精度的控制需求。
传统方法通常采用PID控制器进行处理,但在存在负载扰动和传感器误差的情况下,控制效果可能有限。
模糊控制通过模糊化位置误差和期望位置,利用模糊规则进行推理,可以更好地应对这些干扰,实现更为准确的位置控制效果。
3. 压力控制在某些特定的电机驱动系统中,需要对输出压力进行控制。
传统方法通常采用PID控制器,但在面对压力控制系统的非线性、不确定性和时变性时,PID控制器可能无法满足控制要求。
模糊控制通过将压力信号模糊化,并利用模糊规则进行推理,可以更好地适应非线性和不确定性系统,实现更为精确的压力控制效果。
三、模糊控制在电机驱动系统中的优势1. 对非线性系统的适应性强传统的线性控制方法在面对非线性系统时可能无法满足要求,而模糊控制正是针对这个问题而设计的。
由于模糊控制基于模糊规则进行推理,能够更好地适应非线性系统的特点,从而实现更为精确的控制。

氯化钾的用途和使用方法首先,氯化钾在农业领域有着广泛的用途。
它可以作为肥料使用,提供作物生长所需的钾元素。
氯化钾可以提高作物的抗病能力和抗逆性,促进作物的生长和发育。
此外,氯化钾还可以用于调节土壤的酸碱度,改善土壤肥力,提高作物产量和品质。
其次,氯化钾在医药领域也有着重要的用途。
它可以作为一种钾补充剂使用,用于治疗低钾血症和心律失常等疾病。
此外,氯化钾还可以用于制备一些药物,如钾盐类药物和止血药物等,为人们的健康提供保障。
除此之外,氯化钾还可以用于工业生产。
它可以作为氯化剂使用,用于金属表面处理和清洗,去除金属表面的氧化物和杂质,提高金属的纯度和光洁度。
此外,氯化钾还可以用于制备一些化工产品,如氯化钾肥料、氯化钾溶液等,为工业生产提供原料支持。
在日常生活中,氯化钾也有一些特殊的用途。
比如,它可以用于食品加工,作为调味剂使用,增加食品的咸味和口感。
此外,氯化钾还可以用于水处理,作为一种水质稳定剂使用,调节水质的硬度和酸碱度,保证人们饮用水的安全和健康。
关于氯化钾的使用方法,首先需要注意其溶解性和稳定性。
在使用氯化钾时,应该注意控制其溶解度和稳定性,避免因不当使用而导致不良后果。
其次,需要注意氯化钾的存储和包装。
在存储和包装氯化钾时,应该选择干燥通风的环境,避免潮湿和高温,以免影响其质量和使用效果。
另外,在使用氯化钾时,应该注意其用量和配比,遵循相关的使用标准和技术要求,确保使用效果和安全性。
总的来说,氯化钾是一种具有广泛用途的化学物质,它在农业、医药、工业和日常生活中都有着重要的作用。
在使用氯化钾时,需要注意其用途和使用方法,遵循相关的使用标准和技术要求,确保使用效果和安全性。
希望本文能够为大家对氯化钾有更深入的了解,为相关领域的工作和生活提供一些帮助。

模糊PID控制器在苛化过程中的应用王鹍;崔继仁;徐志如【摘要】在造纸生产中,苛化工段温度控制系统常用的常规PID控制器难以获得理想的控制效果,为此采用一种模糊PID动态切换控制器,其可提高控制系统对被控对象参数变化的适应能力.【期刊名称】《林业机械与木工设备》【年(卷),期】2010(038)004【总页数】2页(P50-51)【关键词】模糊PID切换控制;苛化过程;碱回收【作者】王鹍;崔继仁;徐志如【作者单位】佳木斯大学信息电子技术学院,黑龙江,佳木斯,154007;佳木斯大学信息电子技术学院,黑龙江,佳木斯,154007;佳木斯大学信息电子技术学院,黑龙江,佳木斯,154007【正文语种】中文【中图分类】TP273.4目前,碱法制浆还是国内外造纸工业中普遍采用的制浆方法,而碱回收又是现代碱法制浆的重要组成部分。
碱回收是从制浆产生的黑液中回收大部分的碱,再循环用于生产中,这样不仅可以回收大部分资源,而且还可以减轻环境污染。
本项目中碱回收控制系统的生产工艺分为蒸发、燃烧和苛化三个工段。
苛化生产的目的是将燃烧工序生产出来的绿液经苛化工序后产生的白液供给蒸煮工段使用,产生的白泥送往水泥厂作为生产水泥的原料[1]。
苛化工段运行效果关系到碱的回收能力,其中苛化器内温度是重要参数,其直接影响苛化反应的速度和苛化度,因此必须严格控制苛化器温度。
实际生产中存在各种干扰,且具有时变、不确定和非线性等特性,由于模型参数的不确定性以及控制系统运行过程中出现的一些问题,使得传统PID控制器的控制效果不理想[2]。
PID控制的动态特性不如模糊控制,但静态特性较好,在工作点附近具有良好的控制性能。
模糊控制具有动态特性好、对参数变化及外界干扰适应能力强等优点,但稳态精度较差,且在工作点附近容易产生极限振荡。
本文针对碱回收苛化工段的温度控制系统,从工程应用的角度出发,采用一种模糊PID动态切换控制器优化设计方法,将PID控制和模糊控制有机地结合在一起,实现了优势互补。
- 1 -
工业氯化钾用途
1.玻璃制造:氯化钾可作为玻璃生产中的助熔剂,能够降低玻璃
的熔点和粘度,改善玻璃的可加工性和透明度。
2. 硅酸盐工业:氯化钾可以用于生产陶瓷、釉料、水泥等硅酸
盐制品。它可以提高硅酸盐材料的耐火性和硬度,同时也能增强其粘
结力和成型性。
3. 化肥生产:氯化钾是一种重要的钾肥原料,有助于提高作物
的产量和品质。此外,化肥生产中的氯化钾也可以用于制备其他复合
肥料,如氯化钾硫酸铵复合肥。
4. 纺织染料:氯化钾可以用作染料生产中的溶剂和催化剂,有
助于改善染料的稳定性和颜色鲜艳度。
总的来说,工业氯化钾是一种多功能的化工原材料,广泛应用于
玻璃、硅酸盐、化肥、染料等工业领域。
模糊逻辑控制在工业自动化中的应用效果评估工业自动化是现代制造业发展的重要方向之一,而控制系统是实现工业自动化的核心技术之一。
传统的控制方法在处理模糊的输入和不确定的环境条件方面存在一定的局限性,而模糊逻辑控制作为一种应对不确定性问题的有效方法,近年来在工业自动化中得到了广泛的应用。
模糊逻辑控制是一种基于模糊评估和推理的控制方法,通过建立模糊规则库和模糊逻辑推理机制,将模糊的输入和输出转化为实际的控制指令,实现对复杂系统的控制。
相比传统的控制方法,模糊逻辑控制能够处理不完全和不准确的信息,在不确定的环境条件下,可以实现更加灵活和鲁棒的控制。
在工业自动化中,模糊逻辑控制可以应用于各种复杂的系统,如温度、湿度、流量、速度等控制。
具体应用效果评估可以从以下几个方面进行考量:1. 控制精度:模糊逻辑控制通过建立模糊规则库和模糊推理机制来处理模糊的输入和输出,具有更强的适应性和鲁棒性。
相比传统的控制方法,模糊逻辑控制能够实现对复杂系统的精确控制,提高了控制精度。
2. 控制稳定性:在工业自动化中,控制系统往往面临着不确定性和扰动。
模糊逻辑控制通过模糊规则库和模糊推理机制的建立,可以对系统的不确定性和扰动进行有效的抵抗,提高了控制稳定性。
3. 控制响应速度:对于一些需要快速响应的工业自动化系统,模糊逻辑控制具有较快的响应速度。
通过优化模糊规则库和模糊推理机制的设计,可以使得控制系统的响应速度更快,提高了系统的动态性能。
4. 控制的适应性:工业自动化系统中的工艺和设备通常会存在变化和不确定性。
模糊逻辑控制通过建立模糊规则库和模糊推理机制,能够适应不同的操作环境和工况变化,具有较强的适应性。
5. 控制的可解释性:模糊逻辑控制的规则和推理过程相对直观和易理解,可以通过模糊规则库和推理机制的解释来理解和优化控制系统的行为,提高了控制的可解释性。
综上所述,模糊逻辑控制在工业自动化中具有较好的应用效果。
通过建立模糊规则库和模糊推理机制,模糊逻辑控制能够处理不完全和不准确的信息,在不确定的环境条件下,实现精确、稳定、快速响应的控制。
仪器仪表用户 doi:10.3969/j.issn.1671—1041.2010.05.019
模糊控制在氯化钾氨生产中的应用 寇宏波,白瑞祥 (天津科技大学电子信息与自动化学院,天津300222) 摘要:氯化钾氨生产过程中的钾浓度控制系统属于一个带有很强的惯 性与时滞的非线性系统,传统PID控制难以达到满意的控制效果。针 对该种情况。本文采用参数模糊自整定PIED控制方法对氯化钾氨生产 中钾浓度进行调节,并设计基于模糊PID控制器的控制系统,在线自 动调整PID控制器参数。通过仿真实验分析及在工程实际应用中表 明,采用参数模糊自整定PID控制器后,具有更好的控制效果。
关键词:氯化钾氨;钾浓度;参数模糊自整定・PID控制 中图分类号:TP273.4 文献标志码:B
Application of fuzzy control in the production of potassium ammonium chloride KoU Hong-bo。BAI Rlli・嫡ang (College of Electronic Information and Automation。 ̄anjin University ofSclen ̄and Technology,Tianjin 30(P_22,China)
Abstract:The concentra ̄on of potassium controi system dudng the production process of potassium ammonium chloride belongs to a strong inertia and time lag nonlinear system。therefore。it iS dificult to achieve the satisfactory controI effect via the classicaI PID contro1.
Aimed at the situation。a fuzzy self—tuning PID controller jS designed。 which adjust the concentration of potassium among he production process of potassium ammonium chlodde.In the meanwhile.the control system based on fuzzy PID controller adiusing PID parame- ters on line iS constructed.The simulation analysis and practical ap. plieations in engineering show that the fuzzy self—tuning PID controller has better controI performance.
Key words:potassium ammonium chloride;potassium concentra— tion;self—adjustment parameters fuzzy—PID controller
0 引言 海水提取氯化钾氨中钾浓度控制系统是一个具有大惯 性,纯滞后,分布参数非线性的系统。常规的PID控制尽管结 构简单,使用方便,稳态精度高和算法简单等优点。然而,常规 P[D线性控制器只在工作点附近具有良好的控制线性,偏离工 作点较远时,由于控制对象的非线性特性,难以保持设计的动 态品质。常规PID控制器参数的确定必须依据被控对象准确 的数学模型并且参数K。、K 、K 不能实现自动调节。模糊PID 控制器具有不依赖于被控对象的数学模型和适用于非线性系 统的优点,相对于传统的PID控制具有响应速度加快、超调量 减小、抗干扰能力强等良好的动态特性和鲁棒性。
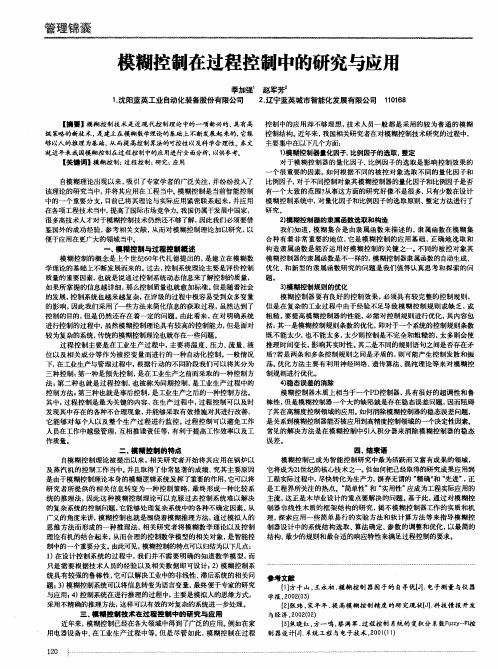
1氯化钾氨生产流程及系统分析 沸石法海水提取氯化钾氨技术是以海水和硝酸氨为主要 原料,通过钾富集、钾分离等工艺过程,生产氯化钾氨产品,主 要生产工艺流程及物料如下图1所示。 钾富集车间 钾分离车间
图1氯化钾氨生产工艺流程简图 欢迎订阅欢迎撰稿欢迎发布产品广告信息
在钾富集工序中首先利用沸石柱组与海水进行离子交换 反应,经硝酸氨溶液洗脱,制得中间产品——富钾液,作为钾分 离车间生产氯化钾氨的原料。钾分离车间对富钾液进行蒸发 浓缩及冷却结晶后得到成品氯化钾氨,从沉降器沉降出的盐 浆经离心机甩干后制得副产品。在钾富集过程中控制钾浓度, 使其保持在12。Be'o钾浓度属于非线性、大滞后变量,采用常 规控制方法难以达到满意的控制效果,因此采用参数模糊自 整定PID控制系统实现对钾浓度的调节。
2模糊PID控制器的设计 2.1参数自整定模糊控制器结构 钾浓度控制是整个工艺的重要环节,通过将PID和模糊控 制器相结合的方式。采用参数自整定模糊PID控制,可以在线 调整PID调节器的参数,增强控制系统的抗干扰能力。 钾浓度调节阀门采用伺服电机驱动,数字PID控制算法根 据增量式PID差分方程计算控制器输出: Au(kT)=K[e( )一e(kr)]+Kie(kT)+ [e( )一 2e(kT)+e(kT一2T)] 如图2所示,控制系统将设定值与检测值比较后的偏差e 及偏差变化率ec输入模糊控制器,根据PID三个参数与偏差e 和偏差变化率eC之间的模糊关系,对参数K Ki、K 在线校正 后,由模糊-PID控制器的输出量au(k)通过对执行机构的驱 动,调节阀门开度,达到控制钾浓度的目的。模糊推理系统主 要由输入语言变量模糊化及输出量的去模糊化(包括语言值 及其隶属度函数)、规则库、模糊推理机等构成。
图2 参数自整定模糊P/D控制原理图 2.2 参数自整定模糊控制器算法 1)本文采用的模糊一PID控制系统为双输入三输出的系 统,控制涉及的两个输人语言变量为偏差I e I和偏差变化率f ec I。三个输出语言变量为PID参数K , 和Kd。钾浓度偏差e 的基本论域为[~30。Be +30。Be ,浓度偏差变化率基本论域 为[一3,十3]。输入量的论域均选定{0,+1,+2,+3,+4,4- 5,十6},I el和I ecI的语言值均选取:零(Z),小(S),中(M), 大(B);参数K。,K 和K 模糊集均为(Z,S,M,B),论域为{0,+ 1,+2,十3},由钾浓度控制系统的特点和经验确定参数K Ki、K 的基本论域分别为[0,100],[0,60],[0,4]。为了计算 机处理和实现的方便,输入偏差f e f、输入偏差变化率f ec I和 输出语言变量的隶属函数均采用线性函数——三角函数,所 对应的模糊语言变量的函数如图3所示。
EIC Vo1.17 2010 No.5 37 口应用实例口 图3 输入输出变量的隶属函数 2)根据PID控制的基本原理,比例系数Kp的作用在于加 快系统的响应时间提高系统精度、积分系数Ki的作用是用于 消除系统的稳态误差、微分系数Kd在于改善系统的动态性能, 总结出在不同的l el和1 eCl下,被控过程对参数K 、K 、K 的 自整定要求的控制规则: a.当l c I较大时,为使系统具有良好的快速跟踪性能,应 取较大的K。和较小的K ,同时为避免出现大的超调,应对积 分加以限制,通常取K.=0。 b.当l e l中等大小时,为使系统响应具有较小的超调,K 应取小些。在此情况下,K,和K 的大小要适中,以保证系统的 响应速度。 ’C.当l e l较小时,为了使系统具有较好的稳定性能,K 和 K.应取大一些,同时为避免系统在设定值附近发生振荡,提高 系统的抗干扰能力,当『ca l较小时,K 值可取得大些,通常为 中等大小;当1 eC『较大时,K 应取小些。 由以上的控制规则设计的模糊控制规则表如表1所示。 表1 参数K ,K 和Kd模糊控制规则表
S j M Z Z I3 l M S j B 8『 M l B B M B I M B S .¨] 、 i z s B 、 f/ }j }l Z Z s 8 Ij Z Z M B B S Z B j B M S Z \ Z S M B l \ B H Z Z S B B Z Z M B B S Z 8 B M S Z
3)根据各模糊子集的隶属函数度赋值图和各参数模糊控 制规则表,应用Mamdani型模糊逻辑推理分别对PID参数K K;、K 进行推理计算。以参数K 为例采用Mamdani间接推理法 说明推理过程。 在表1中,每条规则确定一个模糊关系,共有16个,其中 R ,R ,和R16分别为 R =[(z) ×(Z)1 I] ×(Z)Ko R2=[(z) ×(S) 1] x(B)Ko R16=[(B) ×( 1] ×(M)Ko 通过16个模糊关系, (i=1,2,…16)的“并”运算,可获 得表征钾浓度控制系统控制规则的总的模糊关系R(R=R V R V…V R )。计算出模糊关系R后,利用推理合成规则计算
=(1 e l xI ec I )・ ,并以偏差I e l的论域元素为列,偏 差变化率I CC I为行,元素相应的交点为输出语言变量 制成 模糊控制查询表。 模糊推理的结果K。一般都是模糊值,不能直接用来作为 被控对象的控制量,需要将其转换成精确量去控制伺服机构, 此过程称为去模糊化(Defuzzification),本文采用适合于输出 模糊集的隶属函数是对称的加权平均法,其计算公式为:
kp= 6 ∑ (I e I,
6 ∑ (I e I,I ec I)
参数K。和K 具有相似的模糊推理算法。离线状态下计算 I eI,I eCI在各种组合下参数Kp、K 、Kd的值,组成模糊控制查 询表保存在控制系统的存储器内,控制系统根据实时数据 I ef,l eaI,由控制表获得参数K。、K。和K ,在线调整PID参数。 38 ElC V01.17 2010 No.5 仪器仪表用户 2.3 MatLAB\SimuLink仿真 由于模糊控制器的设计思想是模拟人脑的思考过程,在 设计过程中,对实践经验的依赖性很大,需结合实际经验,选取 控制量,设计控制规则。所选取的控制量和控制规则的效果如 何,必须编制大量的程序进行仿真分析或者等到控制器设计 完成后通过实验观察验证。在MatLAB中运用模糊控制工具箱 和Simulink仿真软件,进行模糊控制器的设计和动态仿真,并 与常规PID控制器进行比较。 根据现场实际情况和工程经验确定被控对象的数学模型 (广义对象开环传递函数)为: = eⅢm 在Simulink下,仿真系统图和在阶跃扰动下模糊PID控制 器和常规PID控制系统的响应输出曲线分别如图4和图5。 『 倦 l S*eP Add3 TFt Tmng ̄ott l l … I{ l L 。J ——————— ———— l 图4 参数自整定模糊PID控制SimuLink仿真模型 //\ \ \ 。 。 。 . , 图5 常规PID和模糊-PID控制下的单位阶跃响应曲线 仿真结果表明,相对于传统PID控制,模糊PID具有较高 的控制精度,超调量盯%减小,而且其系统响应速度加快,过渡 时间ts显著缩短。 3控制系统硬件构成和软件设计简介 控制系统硬件主要由上位机(通用PC机),s7—300PLC (由CPU315—2DP、PS307、SM331、SM332及配套模块)和电动 执行器等现场设备组成。软件主要包括操作系统软件(Win— dow XP),PLC编程软件(Step7V5.4)和监控组态软件(WINCC V6.2)等构成。采用西门子s7—300编程软件STEP7实现参 数自整定模糊PID控制算法,对钾浓度控制系统编制成标准控 制子程序。 系统首先通过PLC的SM331模拟量输入模块接收现场钾 浓度检测仪4—20mA标准电气信号,根据采样所得的数据计 算偏差e和偏差变化率ec,模糊化,查找对应的模糊控制表,实 时在线计算出模糊控制量所对应的Kp、Ki、Kd值。最后,采用 增量式PID控制算法计算控制系统当前控制增量AUi,将AUi 附加在前一时刻的控制量上,即可得到控制量输出U,通过 SM331模拟量输出模块,控制执行器来调节钾浓度。 4结束语 本文所提出的参数自整定模糊PID控制系统,在海水提取 氯化钾氨的现场实际应用中达到了很好的控制效果。通过对 氯化钾氨生产中钾浓度控制的实践证明,能够达到控制要求, 相比常规的PID控制,采用参数模糊自整定PID控制具有更广 阔的应用前景。口