高分辨率遥感影像数据一体化测图系统PixelGrid
- 格式:docx
- 大小:4.77 MB
- 文档页数:18
无人机航空影像数据处理流程中国测绘科学研究院北京东方道迩信息技术有限责任公司目录1、无人机航空影像数据处理流程 (3)2、无人机航空影像数据要求 (4)3、无人机航空影像数据空三加密流程 (5)3.1畸变差校正 (5)3.2建立测区工程 (7)3.3.1工程目录及相机检校文件设置 (8)3.3.2设置航空影像数据 (10)3.3.3设置控制点数据 (14)3.3空三加密 (15)3.4.1数据预处理 (16)3.4.2航带初始点提取 (19)3.4.3自动相对定向及修改 (21)3.4.4自由网平差 (31)3.4.5控制点提取及区域网平差 (35)4、DEM与DOM制作 (37)4.1 DEM匹配及编辑修改 (37)4.1.1工程及格式转换 (37)4.1.2核线影像生成及DEM匹配 (40)4.1.3 DEM编辑修改 (46)4.2 DOM纠正及分幅 (52)4.3.1 DOM纠正及拼接 (52)4.3.2 DOM分幅 (60)1、无人机航空影像数据处理流程高分辨率遥感影像一体化测图系统PixelGrid作为卫星影像数据处理的能力和效率在生产过程中已经得到了很好的验证,其数据适用范围之广、处理效率之高在国内都是其它同类软件无法比拟的。
无人机航空摄影是一种新型的航空影像数据获取方式,由于无人机种类不同以及所搭配的相机不同,其获取数据的质量也不相同,PixelGrid针对国内测绘部分中低空领域普及的无人机航空拍摄数据,提供了高效快速的处理。
其无人机航空影像作业流程图如下:图1-1 无人机航空影像处理流程2、无人机航空影像数据要求对于无人机数据的处理需求必要的一些文件。
其中包括原始影像数据、相机检校文件、控制资料、航线结合表(航线索引图,包括飞行信息)等。
原始数据格式可以为JPG、BMP、TIF等;相机检校文件包括:相机像主点坐标、相机焦距、像元大小、径向畸变差系数(K1、K2)、切向畸变差系数(P1、P2)、CCD非正方形比例系数α、CCD非正交性的畸变系数β、像方坐标系等(其单位为像素或毫米)。
青海国土经略·技术交流ADS80航摄仪采用线阵推扫成像原理,每一次飞行可以同时获取前视、下视、后视三度重叠连续无缝的具有相同分辨率和良好光谱信息的全色、彩色和红外影像。
因而在立体观测、矢量提取和DEM 生成及编辑等过程中,都可充分利用其前视一下视、前视-后视、下视-后视立体像对,选择最优的交会角度获取高质量数据,这是其他航空数字影像无法比拟的。
相机上集成了GPS 和惯性测量装置(IMU),可以为每条扫描线产生较准确的外方位初值,因此在后期的空三加密数据处理中,不像传统摄影测量需要很多的平高控制点,只需在加测少量平高控制点,或无地面控制点的情况下利用PPP 技术,完成地面目标的三维定位,为摄影测量自动化开辟了崭新途径。
1 数据处理1.1 处理流程ADS80影像数据处理主要包括数据准备,工程建立,数据预处理,空中三角测量解算,DEM 匹配,DEM 编辑正射影像生成等。
其数据处理流程如下(图1):1.2 主要技术1.2.1 数据准备本次任务收集到的ADS80影像数据是L0级数据,而PixelGrid 软件空三加密及后续生产需要的是L1级影像数据,需要L0级到L1级数据的转换。
转换时摘 要:本文通过对ADS80影像数据用于1:1万基础测绘项目生产过程中各技术环节的总结,着重说明了在PixelGrid 软件下处理ADS80数据时各工序的作业方法和注意事项,为以后ADS 系列影像在航测生产中更好、更广泛地应用提供参考。
关键词:ADS80影像;区域网平差;DOM基于PixelGrid 软件的ADS80影像数据生产技术探讨◆ 马永春 李 龙(青海省第二测绘院,青海西宁 810000)65需确认是否存在L0级数据的“.sup”和“.odf”影像参数文件,并将“.sup”文件中将其关联的几个文件的路径进行修改,使其分别对应文件的确切存放路径。
建议在进行数据拷贝时,直接拷贝“sessin”文件目录,修改计算机盘符即可,不要随意移动里面的文件,避免破坏文件组织结构。
高分辨率遥感数据的处理与分析方法遥感技术的发展日益成熟,高分辨率遥感数据的获取量逐渐增加。
如何处理和分析这些海量数据成为遥感领域的重要研究课题。
本文将介绍高分辨率遥感数据的处理与分析方法,并探讨其在不同领域的应用。
一、数据预处理高分辨率遥感数据的预处理是数据处理的重要步骤,它包括数据去噪、辐射校正、几何校正等内容。
1. 数据去噪:高分辨率遥感数据中常常存在各种噪声,如椒盐噪声、斑点噪声等。
为了减少噪声对后续分析的影响,可以采用滤波算法对数据进行去噪处理,如中值滤波、均值滤波等。
2. 辐射校正:高分辨率遥感数据的辐射校正是将原始数据转换为物理度量的一个过程。
通过影像的辐射校正,可以消除大气、地表反射率等因素对遥感影像的影响,得到准确的反射率信息。
3. 几何校正:高分辨率遥感数据的几何校正是将影像的像素空间坐标与实际地理坐标之间建立映射关系的过程。
通过准确的几何校正,可以保证影像的空间精度,提高后续分析的可靠性。
二、数据分类与特征提取高分辨率遥感数据的分类和特征提取是将遥感影像转化为语义信息的重要工作。
1. 数据分类:数据分类是指将遥感影像中的像素根据其反射率或其他属性进行分类,以获得具有不同意义的地物信息。
常用的分类方法包括基于像元的分类、基于对象的分类和基于深度学习的分类等。
2. 特征提取:特征提取是将遥感影像中不同地物的特征进行提取和描述的过程。
常用的特征提取方法包括纹理特征提取、形状特征提取、光谱特征提取等。
通过特征提取,可以获得地物的几何、纹理和光谱等多维信息,为后续的应用提供基础。
三、数据融合与信息提取高分辨率遥感数据融合与信息提取是将多源数据融合,获取更丰富的地物信息的关键环节。
1. 数据融合:高分辨率遥感数据融合是指将不同源、不同分辨率的遥感数据进行融合,以获取更全面、更准确的地物信息。
常见的数据融合方法包括基于智能算法的融合、基于模型的融合等。
2. 信息提取:通过数据融合,可以获取到更丰富的地物信息。
科技资讯2016 NO.11SCIENCE & TECHNOLOGY INFORMATION信 息 技 术4科技资讯 SCIENCE & TECHNOLOGY INFORMATION卫星影像作为一种数字产品,是进行相关测绘工作的基础数据源。
它具有覆盖面广、信息丰富、现势性强、更新周期短等优点,其地面分辨率随着航天传感技术的发展而提高,在国民经济和社会发展的各个领域,卫星影像均有着广泛的应用。
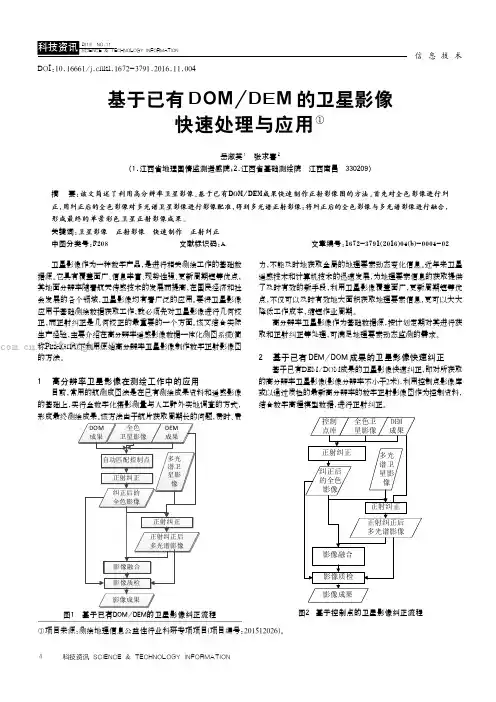
要将卫星影像应用于基础测绘数据获取工作,就必须先对卫星影像进行几何校正,而正射纠正是几何校正的最重要的一个方面。
该文结合实际生产经验,主要介绍在高分辨率遥感影像数据一体化测图系统(简称PixelGrid)下利用原始高分辨率卫星影像制作数字正射影像图的方法。
1 高分辨率卫星影像在测绘工作中的应用目前,常用的航测成图法是在已有测绘成果资料和遥感影像的基础上,实行全数字化摄影测量与人工野外实地调查的方式,形成最终测绘成果。
该方法由于航片获取周期长的问题,费时、费力,不能及时地获取全局的地理要素动态变化信息。
近年来卫星遥感技术和计算机技术的迅速发展,为地理要素信息的获取提供了及时有效的新手段,利用卫星影像覆盖面广,更新周期短等优点,不仅可以及时有效地大面积获取地理要素信息,更可以大大降低工作成本,缩短作业周期。
高分辨率卫星影像作为基础数据源,按计划定期对其进行获取和正射纠正等处理,可满足地理要素动态监测的需求。
2 基于已有DEM/DOM 成果的卫星影像快速纠正基于已有DEM/DOM成果的卫星影像快速纠正,即对所获取的高分辨率卫星影像(影像分辨率不小于2米),利用控制点影像库或以通过质检的最新高分辨率的数字正射影像图作为控制资料,结合数字高程模型数据,进行正射纠正。
①项目来源:测绘地理信息公益性行业科研专项项目(项目编号:201512026)。
DOI:10.16661/ki.1672-3791.2016.11.004基于已有DOM/DEM 的卫星影像快速处理与应用①岳淑英1 张求喜2(1.江西省地理国情监测遥感院;2.江西省基础测绘院 江西南昌 330209)摘 要:该文简述了利用高分辨率卫星影像、基于已有DOM/DEM成果快速制作正射影像图的方法。
遥感影像数据在测绘中的坐标转换与配准方法引言遥感影像数据是现代测绘工作中不可或缺的重要数据源之一。
遥感影像数据的获取方式独特,能够提供大范围的覆盖和高分辨率的图像,因此在测绘领域中有着广泛的应用。
然而,由于不同遥感影像数据的获取时间、采用的感知手段和处理方法等因素的不同,导致了遥感影像数据之间存在坐标系统和空间位置的差异,因此需要进行坐标转换与配准。
一、坐标转换的必要性遥感影像数据的坐标转换是将其所使用的坐标系统转换为与地面实际坐标系统保持一致的过程。
坐标转换的必要性主要体现在以下几个方面:1. 数据融合与一体化:在测绘中,往往需要将多个遥感影像数据进行融合与一体化,以获取更全面、准确的地理信息。
而不同遥感影像数据之间的坐标系统不一致,会导致数据融合和一体化过程中的错位和重叠问题,因此需要进行坐标转换。
2. 空间分析与处理:遥感影像数据在测绘中用于进行空间分析和处理,例如地物分类、变化检测等。
如果不进行坐标转换,那么由于不同遥感影像数据之间的坐标系统不一致,会导致空间分析和处理结果的偏差。
3. 精度控制与验证:在测绘中,通常需要对遥感影像数据进行精度控制和验证,以保证测绘结果的准确性和可靠性。
而不同遥感影像数据之间的坐标系统不一致,会对精度控制和验证过程中的参考基准和标准差产生影响,因此需要进行坐标转换。
二、坐标转换的方法在进行遥感影像数据的坐标转换时,常用的方法主要包括参数法和控制点法。
1. 参数法:参数法是通过确定一系列坐标转换参数来完成坐标转换的方法。
常用的参数法包括七参数法和四参数法。
七参数法是一种较为常用的参数法,它通过求解平移参数、旋转参数和尺度参数来实现坐标转换。
具体步骤是先确定一定数量的同名点,然后通过最小二乘法求解出七个参数的值,最后将这些参数应用于坐标转换。
四参数法是一种简化的参数法,它假设旋转和尺度变化可以忽略不计,仅考虑了平移的影响。
四参数法的求解过程与七参数法类似,只需要确定一定数量的同名点即可。
数字城市正射影像底图生产方法探讨苗艳妮【摘要】With the Huangshan 1:1000 digital orthophto map productionas example,this paper introduced the process starting from aerial triangulation encryption,high precision DEM generation,image rectification,inlaying to output of mapsheet.%以数字黄山1:1000正射影像图(DOM)生产实践为例,介绍了从空三加密、高精度DEM生成、影像纠正、镶嵌到分幅图出图的生产方法。
【期刊名称】《安徽地质》【年(卷),期】2011(021)003【总页数】2页(P235-236)【关键词】正射影像图;空三加密;DEM;镶嵌;Pixelgrid【作者】苗艳妮【作者单位】安徽省基础测绘信息中心,安徽合肥230031【正文语种】中文【中图分类】P237数字正射影像(DOM)是对航空(或航天)相片进行数字微分纠正和镶嵌生成的具有地理坐0标信息的数字影像,具有信息量丰富、表现直观、易于更新等特点,因而逐渐成为数字城市空间数据框架中重要组成部分,这就对DOM生产效率提出了更高要求,需要我们在作业方式和作业流程上下功夫。
当前国内主流的遥感影像处理系统有法国的‘像素工厂’,武汉大学研发的数字摄影测量网格DPGRID,中国测绘科学院开发的高分辨率遥感影像数据一体化测图系统Pixelgrid。
这些软件正在测绘遥感影像的处理中发挥着重要的作用。
黄山是我国数字城市建设试点城市之一。
黄山位于安徽省南部,大部分海拔在150m左右,中部与西北角是山地,中部海拔在300m左右,其中摄区最高点为486m,航摄仪为无IMU/GPS的DMCⅡ140,地面分辨率为0.1m的彩色影像。
航空摄影采用的是中心投影,地形起伏,相片倾斜都会带来一系列的投影差,正射影像制作即是通过已解算得相片的内外方位元素以及高精度的数字高程模型(DEM),逐像元微分纠正重采样得到平行投影的过程。
常用高分辨率遥感影像基本参数
高分辨率遥感影像是一种获取地球表面信息的重要技术,它可以提供
丰富的地理空间数据用于地理信息系统和地理学研究。
以下是常用高分辨
率遥感影像的基本参数。
1.分辨率:高分辨率遥感影像的分辨率通常指每个像素代表的实际地
面单位的大小。
分辨率可以是米、分米甚至亚米级别。
较高的分辨率能提
供更详细的地表信息,但文件大小也更大。
2.波段:高分辨率遥感影像可以提供多个波段的数据,以获取不同光
谱范围的信息。
常见的波段包括红、绿、蓝光波段以及近红外、短波红外等。
不同波段的数据可以用于不同的应用,如植被监测、土地覆盖分类等。
3.数据格式:常见的高分辨率遥感影像数据格式包括栅格格式和矢量
格式。
栅格格式将遥感影像数据划分为像素网格,并包含每个像素的数值
信息。
矢量格式则采用几何对象(如点、线、面)来表示地理现象,通常
用于表示矢量数据(如道路、建筑物等)。
基于MapMatrixGrid 的网络化摄影测量系统实现与优化答 星1,吴克友1,刘 涛1,周勇兵1,田思忆1(1.武汉市测绘研究院,湖北 武汉 430022)摘 要:传统单机版摄影测量系统在协同生产、项目管理、海量影像调度等方面存在弊端,利用MapMatrixGrid 的网络化集群计算模式以及多源地理数据处理能力能有效解决该问题。
阐述了搭建网络化摄影测量系统的关键技术及其优势,并对主流航测产品的作业流程和质量检查方法进行了优化,为提升航测规模化协同生产和管理效率提供思路。
关键词:摄影测量系统;网络化;MapMatrixGrid ;质量检查中图分类号:P23 文献标志码:B文章编号:1672-4623(2020)01-0090-04随着武汉市加快建设国家中心城市的步伐不断深入,自然地理资源与城市规划对测绘地理信息数据的时效性要求越来越高。
当前遥感影像获取途径的多元化,特别是国产高分辨率卫星和无人机影像资源获取便捷,已成为基础测绘数据的重要数据来源。
高时空分辨率影像数据已呈现出大数据特征,并行、高效的数据处理软件与技术不断涌现,如利用Smart 3D 、PhotoScan 等软件实现低空无人机与倾斜影像三维建模的全自动处理;利用Pixel Factory 、Inpho 、Erdas 等软件提供从框幅式到推扫式传感器影像的一体化解决方案等[1-2]。
专业技术间壁垒的不断破除,使摄影测量与遥感、计算机视觉与网络、云计算并行处理等技术相互融合。
人工智能学习算法的不断演化,使大量依赖人工操作的传统摄影测量作业模式被新技术替代。
例如,张祖勋院士[3]提出的“云控制”摄影测量技术,即利用已有地理空间信息数据替代外业控制点采集,已在中小比例尺影像高效、自动的几何定位和数据更新等方面得以实现。
然而,在立体视觉环境中进行大比例尺的航测生产,更多地依赖于人工采集精度和测图经验的积累,且人机交互采集的技术手段已相当成熟。
利用DPGrid系统制作影像图的有关问题探讨王家玉;朱陈明【摘要】随着科技的进步和社会的发展,正射影像应用范围越来越广泛.特别是在国土资源调查、生态环境监测、灾害监测、快速响应等各个领域,迫切要求测绘部门能快速、高效生产满足需要的正射影像产品.现以"2008年地震灾区(秦岭、陇南摄区)1:5000正射影像图制作"项目的生产为例,对采用的数字摄影测量网格DPGrid生产正射影像图的关键技术、工作效率和产品数学精度进行分析和总结,得出结论.【期刊名称】《测绘技术装备》【年(卷),期】2010(012)003【总页数】4页(P31-34)【关键词】DPGrid;空三加密;正射影像;精度【作者】王家玉;朱陈明【作者单位】甘肃省基础地理信息中心,甘肃兰州,730000;国家测绘局第一航测遥感院,陕西西安,710054【正文语种】中文随着科技的进步和社会的发展,各行各业对遥感影像数据处理速度提出了迫切要求,现有的数字摄影测量工作站已难以适应这一要求,因此需要我们在提高效率上下功夫,革新作业方式与作业流程。
目前,在影像处理方面有明显优势的系统如:法国地理院开发的高性能航空数字摄影测量处理系统——像素工厂(Pixel Factory--PF),武汉大学研发的数字摄影测量网格DPGrid软件,中国测绘科学院研发的高分辨率遥感影像数据一体化测图系统PixelGrid软件。
这些软件的应用极大地提高了制作正射影像的速度,降低了成图周期。
其应用的前景备受社会各界的关注。
本文以“2008年地震灾区(秦岭、陇南摄区)1∶5000正射影像图制作”项目的生产为例,对DPGrid生产的正射影像图关键技术、工作效率和产品数学精度进行分析和总结。
2008年地震灾区(秦岭、陇南摄区)1∶5000正射影像图制作项目,测区总面积约4500 km2,测区位于甘肃省天水地区和陕西省汉中地区相交汇的区域,北起秦岭,南接巴山。
全测区以高山地、山地为主,有少量平丘地,平均海拔约为2000 m,最高海拔约3500 m,最低处约470 m,地势南北高,中间低。
2012年12月第6期城市勘测Urban Geotechnical Investigation &SurveyingDec.2012No.6文章编号:1672-8262(2012)06-93-04中图分类号:TP751.1文献标识码:B历史航片数据处理技术及方法探讨徐卫民*,陈香,王琳*收稿日期:2012—05—21作者简介:徐卫民(1972—),女,工程师,主要从事航空摄影测量航内工作。
基金项目:住房和城乡建设部科技项目(2011-R2-3)(天津市测绘院,天津300381)摘要:由于年代久远、数据资料的遗失、控制点的难以获取以及影像的扫描质量问题,在历史航片数据制作过程中碰到了不少困难。
本文从历史航片的扫描,到后期数据整理、空三加密及正射影像图制作等关键环节进行探讨,并对处理后获取的数字正射影像成果精度进行分析,阐述了整个历史航片数据处理的流程。
关键词:历史航片;空三加密;正射影像1引言为了满足现代测绘成果管理的需要,充分发挥历史航片的科学价值,国家测绘地理信息局启动了“国家基础航空摄影资料数字化与建库”项目。
该项目旨在完成航片的扫描数字化,建立航片影像数据库,对实现航空摄影资料管理的数字化、保证档案资料的安全完整、增强测绘保障能力具有重要意义[1]。
天津市测绘院于2004年启动历史航片的扫描任务,2011年启动并完成历史航片正射影像图的制作。
由于年代久远、数据资料的遗失、控制点的难以获取以及影像的扫描质量问题,在历史航片数据制作过程中碰到了不少困难。
本文基于历史航片的数据处理,对采用高分辨率遥感影像一体化测图系统PixelGrid (以下简称“PixelGrid 系统”)处理历史影像的方法、流程及关键技术环节进行探讨,并对成果精度进行分析。
2历史航片数据处理难点历史航片涉及的航摄仪有RC30,RC20,RC -8等不同类型,摄影比例尺从1/35000 1/3200不等,地面分辨率有0.1m ,0.2m ,0.5m 和1m ,胶片类型有黑白和彩红外两种。
第33卷第6期2010年12月测绘与空间地理信息G EoM A Tl C s&S PA TI A L I N FO R M A T l oN T E C H N O L O G YV01.33.N o.6D ec.,2010高分辨率卫星影像数据操作平台的建立与立体量测王卫安,王伟,乔刚(同济大学测量与国土信息工程系,上海200092)摘要:高分辨率卫星影像由于高空间分辨率和立体成像观测使得数据量通常很大,建立一个快速操作高分辨率卫星影像数据的平台非常必耍。
本文利用G D A L开源库研究建立了高分辨率卫星影像数据操作平台,主要包括大数据量卫星影像读取、显示、缩放、平移、截取等基本操作。
在此平台基础上,利用有理函数模型进行立体影像几何定位,实现了高分辨率卫星影像立体量测。
关键词:高分辨率;数据量大;立体观测中图分类号:T P79文献标识码:B文章编号:1672—5867(2010)06—0056—03T he E s t a bl i s hm ent of H i gh--r es ol ut i on Sat el l i t e I m age D at a Pl at f or mand T hr ee...di m ensi onal M eas ur em entW A N G W e i—a n,W A N G W ei,Q I A O G ang(D epar t m ent of Surve y i ng an d G eo—i nf or m at i cs Engi nee ri ng,Tongj i U n i v er s i t y,1239Si pi ng R oad,S ha ngh ni200092,C hi na)A b s t ra ct:B e ca u s e of i t s hi gh s pat i al r es ol ut i on a nd t h r e e—di m en si o na l i m a gi ng obs er vat i on,hi gh—r esol ut i on s at el li t e i m agery(H R—SI)da t a i s usual l y ver y l ar ge,w hi ch m akes i t ver y ne cess ar y t o es t abl i s h a fa s t ope r at i on pl at f or m f or hi g h—r esol ut i on s at el l it e i m a ge dat a.I n t hi s pa per,w e ut il i zed t he open s our ce G D A L l i br ar y t o bui l d H R S I dat a pl at f or m t h at i ncl u des a l ot of basi c oper a t i ons of sat—el li te i m a ge dat a s uch a s r ead,d i s pl ay,zoom,pan and i nt e r cept i o n.B ased o n t hi s pl at for m,w e us e d R at i o nal F u nc t i o n M od e l f or t hr ee—di m e ns i onal i m a ge ge om et r i c posi t i oni ng a nd ac hi e ve d t h r e e—di m en si o na l m ea sur i ng f or hi g h—r esol ut i on s at el l it e i m ages.K e y w or ds:hi gh—r e sol ut i on;l a r ge vol um es of dat a;st er eo m ea s ure m ent0引言1影像数据操作平台的建立随着遥感技术的发展,遥感影像的分辨率越来越高,数据量越来越大,一景高分辨率卫星影像,数据量可能会达到几个G B。
高分辨率遥感影像数据一体化测图系统PixelGrid
北京四维空间数码科技有限公司
一、概况介绍
高分辨率遥感影像数据一体化测图系统PixelGrid(以下简称“PixelGrid”)是由中国测
绘科学研究院自主研发的“十一五”重大科技成果,获得2009年度国家测绘科技进步一等奖。
为将这一重大科技成果实现产业化,2008年开始,由中国测绘科学研究院参股单位北京四
维空间数码科技有限公司进行成果转化和产品化,并开展销售。
该软件是我国西部1:5万地形图空白区测图工程以及第二次全国土地调查工程的主力软件,
被誉为国产的“像素工厂”。
PixelGrid以其先进的摄影测量算法、集群分布式并行处理技术、强大的自动化业务化处理
能力、高效可靠的作业调度管理方法、友好灵活的用户界面和操作方式,全面实现了对卫星影像
数据、航空影像数据以及低空无人机影像数据的快速自动处理,可以完成遥感影像从空中三角测
量到各种比例尺的DEM/DSM、DOM等测绘产品的生产任务。
PixelGrid软件主界面。
二、主要特点
PixelGrid系统以现代摄影测量与遥感科学技术理论为基础,融合计算机技术和网络通讯技
术,采用基于RFM通用成像模型的大范围遥感影像稀少或无控制区域网平差、基于旋转/缩放不
变性特征多影像匹配的高精度航空影像自动空三、基于多基线/多重特征的高精度DEM/DSM自动
提取、等高线数据半自动采集及网络分布式编辑、基于地理信息数据库等多源控制信息的高效影
像地图制作、基于松散耦合并行服务中间件的集群分布式并行计算等一系列核心关键技术,是中
国测绘科学研究院研制的一款类似“像素工厂”(ISTAR PixelFactoryTM)的新一代多源航空航
天遥感数据一体化高效能处理系统。
同现有的国内外系统比较,PixelGrid系统的特点主要表现在:
1、PixelGrid系统中使用的关键算法和技术已经基本成熟,较国外同类系统更适合于国内
测绘遥感生产单位。
经多家测绘生产单位使用后结果表明:系统技术先进,运行稳定可靠;在四川汶川地震、青
海玉树地震、舟曲泥石流和云南盈江地震等应急影像快速处理中发挥了较大作用,在接到数据后
的6-8小时内可完成摄影区域DEM/DOM的制作。
2、与同类国外商用遥感软件相比,有较高的性价比
PixelGrid系统可同时支持单机多核CPU/GPU多线程模式和基于高速局域网的多核CPU/GPU
集群分布式并行运算,系统的中低配置可以最大限度的利用生产单位已有的计算机和局域网资源,
若采用高性能集群计算机(刀片机),软件运行性能则更高。PixelGrid系统基本形成了类似并
超越以“像素工厂”(ISTAR PixelFactoryTM)为代表的新一代多源对地观测数据一体化高效能
处理系统。从市场价格看,PixelGrid系统全套模块售价低于同类国外商用遥感软件,但具有较
高的性价比。
3、基于已有DOM和DEM的自动、高精度配准技术
与国外同类系统相比,PixelGrid系统具有独特的航空航天遥感影像与已有DOM和DEM的自
动、高精度配准技术,可实现航空影像和高分辨率卫星影像区域网平差过程中控制点的自动提取,
实现了大范围高分辨率遥感影像的快速精准定位和高效高精度的影像地图制作及更新的功能,
4、多数据源支持
PixelGrid系统首次采用统一的RFM传感器成像几何模型对包括高分辨率卫星影像、传统航
片和新型数字航空影像在内的航空航天数据,以统一的数据处理算法及作业流程进行测图,用户
界面更加简练和易于操作;另外,采用统一的RFM传感器成像几何模型也易于对软件系统进行快
速升级和维护。具体如下:
▲ 卫星影像数据:包括目前主流的所有高分辨率卫星影像,如QuickBird/WorldView-I、
IKONOS、SPOT1-4、SPOT-5 HRS/HRG、IRS-P5、OrbView、ALOS/PRISM等,并支持大数据量影像
的批量处理。
▲ 航空影像数据:包括传统扫描航空影像数据和新型数字航空影像,如RC30、UltraCam
系列、SWDC、DMC等主流光学传感器数据。
▲ 低空无人机影像数据。
5、卫星影像数据稀少控制点区域网平差
PixelGrid系统首次研发和采用大范围区域稀少或无地面控制卫星影像区域网平差技术,有
效解决了大测区区域网平差过程中需要考虑的地球曲率改正和跨投影带问题;
卫星影像稀少控制点平差。
实际生产表明,在西部1:50000测图工程中,只需每14-20幅地形图布设一组控制点即可满
足测图控制的要求,这无疑大大减轻了外业控制的工作量,另外,采用无控制条件下自由网平差
或单侧进行控制的方案,也使得边境地区和境外地形图测绘成为可能。
6、自动、高效的航空影像区域网平差技术
▲ 针对DGPS/IMU辅助的航空影像数据可采用DGPS/IMU辅助区域网平差,通过DGPS/IMU
传感器自主定位系统直接量测影像的外方位元素,直接完成影像的定向。仅需在使用DGPS/IMU
之前通过合理设置的检校场或少量的地面控制点,解算DGPS/IMU系统的偏移/漂移分量、IMU与
成像系统之间的校准误差、GPS/IMU/成像系统之间的侧臂改正参数以及内定向参数,由此建立像
方和物方之间的严格几何关系。
下图为利用PixelGrid软件DGPS/IMU辅助空三的方式进行全自动连接点量测所获得的结果
(已进行了自动粗差剔除),剩余连接点最大像点残差为8.8μm,自动提取的连接点分布均匀,
且73%以上为大于4度重叠的点。
▲ 针对无DGPS/IMU辅助的低空无人机数据,可进行相机畸变差改正,然后采用基于尺度/
旋转不变特征和多基线影像匹配技术进行全自动连接点选取及配准,最后利用PAT-BTM /
BingoTM进行自动稳健的粗差定位及剔除,完成区域网平差
利用PixelGrid软件自动空三模块所提取的一个10度重叠连接点。
航空影像区域网平差。
7、无人机影像空中三角测量技术
▲ 高效完成非量测型相机影像畸变差改正,同时完成影像旋转,输出影像幅面不变,主点
偏移量X0、Y0分别改正为0、0(针对低空飞行器小像幅影像)
▲ 针对低空飞行器影像重叠度不够规则、像幅较小、像片数量多、倾角过大且倾斜方向没
有规律等特点,采取了基于尺度/旋转不变特征和多基线影像匹配技术的全自动连接点选取及配
准
基于尺度/旋转不变特征和多基线影像匹配技术的全自动连接点选取及配准(倾斜摄影影像)。
8、基于多基线、多重匹配特征的自动匹配技术
PixelGrid系统首次提出并研发了独特的基于多基线、多重匹配特征的自动匹配技术,采用
由粗到细(Coarse-to-fine)的多级影像匹配策略,综合集成多种成熟的、性能互补的影像匹配
算法,在匹配算法的各个子模块之间进行质量控制、自动进行匹配粗差定位和剔除,充分利用高
分辨率遥感影像所提供的新特点(高信噪比,高反差的影像,高地面覆盖重叠率等),获取成像
区域的高精度DEM,有效解决了复杂地形条件下DEM/DSM的全自动提取。
PixelGrid自动匹配流程。
下图为0.2米地面分辨率的UltraCamD数字航空影像(城市中心区域,4条航带,80%航向
重叠率,60%旁向重叠率)自动提取的1.0米间隔DSM彩色晕渲图。自动提取的DEM中近60%的
点成功的匹配到6张以上航片,这样不仅可以充分利用高重叠率影像带来的益处,提高影像匹配
的成功率和可靠性,同时也保证了匹配结果的高程精度。由于在匹配过程中自动提取并匹配了大
量特征线,因此DSM详尽的反映了城乡区域的细微地貌和人工建筑物结构。
另外,以自动提取的高精度DEM/DSM为基础,采用独特的等高线数据自适应滤波/光滑关键
技术进行测图区域等高线数据的半自动提取,大大减轻了内业数据采集的工作量。下图为由
IRS-P5自动提取的DEM数据生成的等高线数据,可以看出,该等高线数据经过一定人工编辑即
可满足1:50000制图的要求。
9、高效(准实时)正射影像生成及自动镶嵌
该技术有如下特点:
▲ 基于GPU并行运算的极大/大量影像数据快速漫游技术
▲ 基于GPU并行运算的准实时正射影像生成(加速比12.0)
▲ 基于自动影像匹配的正射影像高精度配准及拼接技术
图形处理器并行运算。
▲ 基于动态规划算法的正射影像拼接线提取
通常的拼接线。 自适应正射影像拼接线(躲避房屋,树木等)。
10、基于集群计算机系统的并行分布式计算
目前遥感数据处理业务普遍存在数据量大、项目周期紧等特点,针对这些特点,PixelGrid
系统支持基于高速网络的多核CPU/GPU集群分布式并行化处理,实现了基于松散耦合并行服务中
间件的分布式并行计算,可以把局域网中互联的所有工作站(包括PC机和高性能集群计算机)
通过软件的方式进行通信和协作,以一定的任务调度策略共同完成影像数据的分布式处理,大大
提高遥感数据的处理能力,实现影像数据处理的快速化以及自动化。
该架构模式优点:
▲ 中间件可以屏蔽网络中参与处理的计算机平台的异构,从而可以透明地使用这些计算平
台。
▲ 增加或删除计算节点而无需修改现有系统,可直接在系统操作界面上进行,从而提高系
统的可扩展性。
▲ 不同的实现但符合接口和协议规范的服务可以在系统中使用,因此具有比较好的开放性。