最新第二章-智能机器人的运动系统
- 格式:ppt
- 大小:7.24 MB
- 文档页数:98
1000字智能机器人对未来有什么影响的毕业论文篇一:智能机器人毕业设计开题报告毕业论文(设计)开题报告姓名学号院系机电工程学院专业年级指导教师2021年 03 月 20 日填表说明1.原则上应于最后一学年第一学期完成毕业论文(设计)的选题和开题工作。
2.本表由学生在开题报告经指导教师指导和指导教师小组集中开题指导并修改后填写。
指导教师和答辩小组在学生填写后,应在本表相应新闻节目里顺序排列填写确认性意见。
本表最后由院(系)盖章备案保存。
3.学生应执行本表撰写毕业论文(设计),不得作实质性改变。
学生须在所在院(系)规定的三十天内学术论文完成毕业论文(设计)并参加答辩。
4.毕业论文(设计)的具体提议请参阅《新乡学院学术论文(设计)工作条例》和《新乡学院学术论文(设计)写作与排版打印规范》。
5.本表可到教务处网站下载,正反双面打印。
选题的研究现状国外现状:从上世纪50年代起,为了满足长距离管道的自动清理及检测的需求,英、美等国迅即开展了这方面的研究,其最初的成果是在1965年,美国Tuboscope公司采用漏磁检测装置Linalog首次成功进行了管内检测,尽管当时尚属于定性检测,但不具划时代的意义。
国内现状:我国从20世纪90年代初期,开始了管道探伤机器人的研发工作,国内较研究课题早进入该研究领域的有哈尔滨工业大学、清华大学、上海交通大学、中国石油天然气管道局等单位。
相比较而言,我国的地下管道检测技术仍处于起步探索阶段,大部分检测管道腐蚀的技术都停留在管外检测,方法传统落后。
各种管道探伤机器人仍在研究中,成熟的产品尚未开发出来。
尽管某些科研单位己经研制出了几种功能样机,但它们须要对空管道通过进行检测,难以满足工程上为的要求。
篇二:智能机器人论文智能机器人的前途发展与应用前景摘要本文介绍干晓磊了智能机器人的发展战略概况、机器人的感官系统、机器人运动系统内人工智能技术在机器人中的应用,智能机器人是一个在感知-思维-效应方面全面模拟人的机器系统,外形不一定像人。
学人走路身体灵活在17日召开的美国科学促进协会会议上,研究人员展示了他们的最新发明成果——新型步行机器人。
相关研究报告将刊登在本周出版的《科学》杂志上。
新型机器人运用自己能弯曲的双脚和电动化脚踝带动双腿迈步,其双臂也会随着脚步的移动来回摆动保持身体平衡。
康奈尔大学研究人员安迪·鲁伊纳说新型步行机器人走路时一起一伏,使身体灵活运动,跟人没什么两样。
鲁伊纳说“我们让它更多地注意动作。
”而其动作就是孩子学走路时必须掌握的。
因此,科学家们把此类机器人形象地称为“初学走路的孩子”。
任何路面行走自如麻省理工学院科学家泰德拉克说,这种机器人内置多个传感器,使其“在20分钟内学会像人一样走路”。
传感器能以每秒200次的速度测量机器人每个动作的倾斜度和速度,然而向其他电动机下达新指令来调节身体姿势。
传感器还指示制动器控制机器人脚踝上弹簧的压力,使其整体平稳向前。
“每走一步,制动参数都会有所改变,”泰德拉克说,“机器人可以在任何路面上走路,并调节走路的姿势。
”实际上,新型机器人在沙滩、草地和人行道等不同路面上走路时,能像人一样改变步伐的大小。
新型机器人还学会了在水车上走路,它配合水车倾斜度和速度的改变不断调节姿势。
它可以自动启动,并会向后倒着走。
动力设计节省能量众所周知,不换新电池的情况下,机器人用的能量越少,其操作时间越长。
新型机器人最大的优点莫过于它非常节能。
科学家在发明新型机器人时,运用了“被动动力设计”的原理和装置,使机器人依靠重心的改变和类似肌肉的弹簧和电动机带动其走路。
因此,此类机器人维持走路所需的能量仅仅相当于其他步行机器人的很小一部分。
为此,鲁伊纳对学步机器人颇为自得。
他说:“机器人要想实用,就必须能长时间运作。
”(朱磊)iStruct人形和类人猿机器人复杂的下肢系统具有43点压力传感器阵列,有望成为未来穿越遥远行星表面的探险家。
1.这款多腿机器人由德国人工智能研究中心和不来梅大学联合开发,体现了驱动式多点接触脚的优势,使用一套传感器监测脚和踝关节的精确运动。
智能机器人操作系统的研究与应用一、引言随着科学技术的快速发展,机器人在人类的生活中越来越普及。
机器人不仅在工业生产中发挥重要作用,而且也开始进入人类的工作生活中,辅助人类完成各种任务。
然而,在机器人的运作过程中,操作系统的作用不容忽视。
本文将就智能机器人操作系统的研究与应用展开讨论。
二、智能机器人操作系统的定义智能机器人操作系统是为智能机器人设计的一种操作系统,它负责控制和监视机器人的各项动作。
智能机器人操作系统采用了人工智能技术,可根据不同的任务要求自动完成机器人的动作控制、信息处理等操作,从而最大限度地发挥机器人的效益。
三、智能机器人操作系统的主要技术1、通信技术:智能机器人操作系统采用了通信技术,实现人机交互。
采用无线通信技术,使机器人能够远程控制、传输数据等,大大提高了机器人在各种场合下的灵活性。
2、人工智能技术:智能机器人操作系统使用人工智能技术,对机器人的行为进行监控与控制,从而使机器人能够自主适应不同的工作环境。
同时,人工智能技术还能为机器人提供自我学习和自我进化的能力。
3、精准感知技术:智能机器人操作系统运用了各种精准感知技术,如视觉感知、声音感知、力感知等,使机器人能够更加精确地感知环境,以提高机器人的操作精度。
4、运动控制技术:智能机器人操作系统还采用了运动控制技术,对机器人的动作进行控制。
同时,运动控制技术还能够帮助机器人能够根据工作环境的变化来自适应调整自己的控制方式。
四、智能机器人操作系统的应用1、工业生产:智能机器人的操作系统在工业生产中得到广泛应用,例如汽车制造、电子产品制造等。
机器人操作系统可以帮助机器人完成各种复杂的工作,提高生产效益。
2、农业生产:智能机器人的操作系统也可以应用于农业生产,例如农田除草、果实采摘等。
机器人操作系统使得机器人能够具备自主感知、自动操作等能力,从而提高生产效率。
3、医疗领域:智能机器人的操作系统还可以应用于医疗领域,例如手术机器人等。
《六轴协作机器人的运动控制系统设计》篇一一、引言随着工业自动化和智能制造的快速发展,六轴协作机器人因其实时性、高精度以及高度灵活的特点,被广泛应用于各个行业中。
而一个高效的、精确的运动控制系统设计,则是六轴协作机器人发挥其优势的关键。
本文将详细阐述六轴协作机器人的运动控制系统设计,从系统架构、硬件设计、软件设计、算法实现及性能评估等方面进行全面探讨。
二、系统架构设计六轴协作机器人的运动控制系统架构主要包括硬件层、驱动层、控制层和应用层。
硬件层负责机器人的机械结构及传感器等硬件设备的连接;驱动层负责将控制层的指令转化为电机等执行机构的动作;控制层是整个系统的核心,负责接收传感器数据、计算控制指令并输出给驱动层;应用层则是根据具体应用场景,对控制层的输出进行进一步处理和优化。
三、硬件设计硬件设计是六轴协作机器人运动控制系统的基础。
主要涉及电机选择、传感器配置、电路设计等方面。
电机选择应考虑其扭矩、速度、精度等指标,以满足机器人的运动需求。
传感器配置则包括位置传感器、力传感器等,用于获取机器人的状态信息。
电路设计则需保证系统的稳定性和可靠性,确保机器人能够长时间、高效地运行。
四、软件设计软件设计是六轴协作机器人运动控制系统的灵魂。
主要包括操作系统选择、控制算法实现、人机交互界面设计等方面。
操作系统应具备实时性、稳定性等特点,以保证机器人的高效运行。
控制算法是实现机器人精确运动的关键,包括路径规划、运动控制、避障算法等。
人机交互界面则方便操作人员对机器人进行控制和监控。
五、算法实现算法实现是六轴协作机器人运动控制系统的核心技术。
主要包括路径规划算法、运动控制算法和避障算法等。
路径规划算法应根据具体任务和工作环境,为机器人规划出最优路径。
运动控制算法则负责控制机器人的运动,使其按照规划的路径进行精确运动。
避障算法则能在机器人运动过程中,实时检测障碍物并做出相应调整,保证机器人的安全运行。
六、性能评估性能评估是六轴协作机器人运动控制系统设计的重要环节。
为了使机器人完成各种调控手段执行不同的任务和行动。
作为一个计算机系统,领先的技术,计算机控制技术,其中包括非常广泛,从智能机器人,任务的描述来控制伺服运动控制技术。
以实现各种硬件系统的控制都需要的,并且包括各种软件系统。
第一机械手控制方法使用顺序的,与计算机,机器人使用的计算机系统的整合的机械和电气设备的功能,以及使用的教学和重放控制的。
随着信息技术和控制技术的发展,以及扩大机器人的范围内,智能控制技术,机器人正朝着的方向发展,它已经离线编程,高级语言任务,多传感器信息融合,智能控制行为等新技术。
技术将促进各种智能机器人的发展。
当今的自动控制技术都是基于反馈的概念。
反馈理论的要素包括三个部分:测量、比较和执行。
测量关心的变量,与期望值相比较,用这个误差纠正调节控制系统的响应。
这个理论和应用自动控制的关键是,做出正确的测量和比较后,如何才能更好地纠正系统。
PID(比例-积分-微分)控制器作为最早实用化的控制器已有50多年历史,现在仍然是应用最广泛的工业控制器。
PID控制器简单易懂,使用中不需精确的系统模型等先决条件,因而成为应用最为广泛的控制器。
它由于用途广泛、使用灵活,已有系列化产品,使用中只需设定三个参数(Kp,Ti 和Td)即可。
在很多情况下,并不一定需要全部三个单元,可以取其中的一到两个单元,但比例控制单元是必不可少的。
关键词:机器人,机器人控制,PID,自动控制To enable the robot to complete a variety of control means various tasks and actions performed. As a computer system, the key technology, computer control technology, including a very wide range, from the robot intelligent, task description to the motion control and servo control technology. Both needed to achieve control of various hardware systems, and includes a variety of software systems. The first robot uses sequential control mode, with the development of the computer, the robot uses a computer system to integrate the functions of mechanical and electrical equipment, and the use of teaching and playback control. With the development of information technology and control technology, and expanding the scope of application of the robot, intelligent robot control technology is moving in the direction of development, there has been off-line programming, task-level language, multi-sensor information fusion, intelligent behavior control and other new technologies. Technology will facilitate the development of a variety of intelligent robots.Today's automatic control techniques are based on the concept of feedback. Elements feedback theory consists of three parts: the measuring, comparing and implementation. V ariable measurements concern, compared with expectations, with the error correction control system response regulator. The key to the theory and application of automatic control is made after the correct measure and compare, how best to correct the system.PID (proportional - integral - derivative) controller as the first practical controller has 50 years of history, and still is the most widely used industrial controller. PID controller is easy to understand, without the use of an accurate system model prerequisites, and thus become the most widely used controller.It is due to the widespread use, flexible, has a series of products, the use of simply setting three parameters (Kp, Ti and Td) can be. In many cases, it does not necessarily require all three units, which may take one to two units, but the ratio is essential to the control unit.Keywords: robots, robot control, PID, automatic control引言信息技术是当前高技术发展中的主流技术,它的发展对其它技术会产生极大的影响。
1.机器人的定义:1)美国机器人工业协会给出的定义:机器人是一种用于移动各种材料,零件,工具或专用装置,通过可编程序动作来执行各种任务并具有编程能力的多功能机械手。
2)日本工业机器人协会给出的定义:一种带有存储器件和末端操作器的通用机械,它能够通过自动化的动作替代人类劳动。
3)我国科学家对机器人的定义:机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力,规划能力,动作能力和协同能力,是一种具有高度灵活性的自动化机器。
2.PID工作原理,作用:PID控制是自动化中广泛使用的一种反馈控制,其控制器由比例单元,积分单元和微分单元组成,利用信号的偏差值,偏差的积分值,偏差的微分值的组合来构成操作量,操作量中包含了偏差信号的现在,过去,未来三方面的信息,所以是一种经典控制方式。
1)P-比例控制:作用:提高快捷性,灵敏度;不足:系统不稳定,易振荡2)I-积分控制:作用:消除误差,提高稳态精度;不足:输出缓慢,系统稳定性下降;3)微分控制:提高抗扰能力;不足:不稳定。
3.简述滚珠丝杠工作原理:在丝杆和螺母上加工有弧行螺旋槽,当它们套装在一起时便形成螺旋滚道,并在滚道内装满滚珠。
而滚珠则沿滚道滚动,并经回珠管作周而复始的循环运动。
回珠管两端还起挡珠的作用,以防滚珠沿滚道掉出。
4. 机器人工作原理:工业机器人系统组成1)机械系统作用相当于人的身体(骨骼,手,臂,腿等);2)驱动系统相当于人的肌肉;3)控制系统相当于人的大脑;4)感知系统相当于人的五官。
机器人系统实际上是一个典型的机电一体化系统,其工作原理为:控制系统发出动作指令,控制驱动器动作,驱动器带动机械系统运动,使末端操作器到达空间某一位置和实现某一姿态,实施一定的作业任务。
末端操作器在空间的实时位姿由感知系统反馈给控制系统,控制系统把实际位姿与目标位姿相比较,发出下一个动作指令,如此循环,直到完成作业任务为止。
1机械人技术集中了机械工程、电子技术、计算机技术、自动控制理论及人工智能等学科的最新研究成果。
机器人的控制系统1. 引言机器人的控制系统是指对机器人进行实时控制和指导的软硬件系统。
它是机器人技术中的重要组成部分,负责控制机器人的运动、感知和决策。
机器人的控制系统需要具备高效、准确和可靠的特点,以实现机器人在不同环境和任务下的自主、智能运行。
本文将介绍机器人的控制系统的基本原理和主要功能。
2. 控制系统的基本原理机器人的控制系统通常采用分层控制结构,包括感知层、决策层和执行层。
感知层负责采集机器人周围环境的信息,决策层负责根据感知数据制定运动策略和任务计划,执行层负责控制机器人的运动和动作执行。
控制系统的基本原理如下:2.1 感知层感知层的主要任务是通过传感器采集机器人周围环境的信息。
常用的传感器包括摄像头、激光雷达、红外传感器等。
感知层通过感知和识别环境中的物体、障碍和目标,提供给决策层进行处理。
2.2 决策层决策层的主要任务是根据感知数据制定运动策略和任务计划。
决策层利用感知数据进行环境分析和目标识别,然后根据预先设定的算法和规则进行决策。
决策层可以根据情况调整机器人的运动策略和行为。
2.3 执行层执行层的主要任务是根据决策层的指令控制机器人的运动和动作执行。
执行层通过控制机器人的关节和执行器,实现机器人的运动、抓取和操作等动作。
执行层需要根据任务需求实时调整机器人的运动参数,保证机器人能够完成所要执行的任务。
3. 控制系统的主要功能机器人的控制系统具有多种功能,包括自主导航、路径规划、避障和交互等。
以下将介绍控制系统的主要功能:3.1 自主导航自主导航是控制系统的基本功能之一,机器人需要通过感知环境和决策运动策略,在未知环境中实现自主导航。
自主导航需要进行环境建模、路径规划和运动控制等步骤,以实现机器人的安全、高效移动。
3.2 路径规划路径规划是指根据机器人的起点、终点和环境信息,确定机器人的移动路径。
路径规划需要考虑避障、优化路径和实时调整等因素,以确保机器人能够按照预定路线安全、高效地移动。
第二章工业机器人的机械结构和运动控制章节目录2.1 工业机器人的系统组成2。
1。
1 操作机2。
1.2控制器2.1.3示教器2.2工业机器人的技术指标学习目标导入案例课堂认知扩展与提高本章小结思考练习2.3 工业机器人的运动控制2.3.1 机器人运动学问题2.3.2机器人的点位运动…2。
3.3机器人的位置控制课前回顾何为工业机器人?工业机器人具有几个显著特点,分别是什么?工业机器人的常见分类有哪些,简述其行业应用。
学习目标认知目标*熟悉工业机器人的常见技术指标*掌握工业机器人的机构组成及各部分的功能*了解工业机器人的运动控制能力目标*能够正确识别工业机器人的基本组成*能够正确判别工业机器人的点位运动和连续路径运动导入案例国产机器人竞争力缺失关键技术是瓶颈众所周知,中国机器人产业由于先天因素,在单体与核心零部件仍然落后于日、美、韩等发达国家。
虽然中国机器人产业经过30 年的发展,形成了较为完善的产业基础,但与发达国家相比,仍存在较大差距,产业基础依然薄弱,关键零部件严重依赖进口。
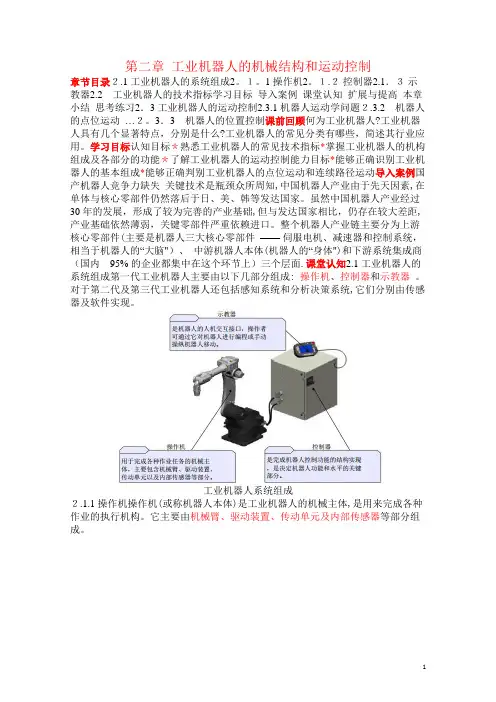
整个机器人产业链主要分为上游核心零部件(主要是机器人三大核心零部件——伺服电机、减速器和控制系统,相当于机器人的“大脑")、中游机器人本体(机器人的“身体")和下游系统集成商(国内95% 的企业都集中在这个环节上)三个层面.课堂认知2.1 工业机器人的系统组成第一代工业机器人主要由以下几部分组成: 操作机、控制器和示教器。
对于第二代及第三代工业机器人还包括感知系统和分析决策系统,它们分别由传感器及软件实现。
工业机器人系统组成2.1.1 操作机操作机(或称机器人本体)是工业机器人的机械主体,是用来完成各种作业的执行机构。
它主要由机械臂、驱动装置、传动单元及内部传感器等部分组成。
关节型机器人操作机基本构造机器人操作机最后一个轴的机械接口通常为一连接法兰,可接装不同的机械操作装置,如夹紧爪、吸盘、焊枪等.(1) 机械臂关节型工业机器人的机械臂是由关节连在一起的许多机械连杆的集合体。
机器人智能导航系统的设计与实现智能导航系统在现代生活中扮演着重要的角色。
随着科技的快速发展,机器人智能导航系统的设计与实现成为了一个热门的研究领域。
本文将探讨机器人智能导航系统的设计原理、实现方法以及其在实际应用中的优势。
一、设计原理1. 定位技术:机器人智能导航系统需要准确地定位自身位置。
目前常用的定位技术包括GPS、惯性导航系统、激光雷达等。
通过这些技术的结合使用,机器人可以实时获取自身的位置信息,并进行精确的导航。
2. 地图构建:机器人智能导航系统需要建立一个准确而完整的地图数据库。
地图数据库可以通过激光雷达、摄像头、扫描仪等设备收集环境信息,并进行地图构建和更新。
地图数据库是机器人导航的核心,决定了机器人在导航过程中的准确性和速度。
3. 环境感知:机器人智能导航系统需要能够感知周围环境的变化以及可能的障碍物。
这可以通过激光雷达、摄像头、声音传感器等多种传感器来实现。
通过环境感知,机器人可以及时调整路径,避免碰撞,并且能够适应不同的导航场景。
4. 路径规划:机器人智能导航系统需要根据目标位置和环境信息,规划最优的导航路径。
常用的路径规划算法包括A*算法、Dijkstra算法等。
这些算法可以根据不同的导航需求进行优化,以保证机器人在导航过程中能够选择最佳的路径。
5. 运动控制:机器人智能导航系统需要实现精确的运动控制。
通过控制机器人的轮子或关节来实现运动控制。
运动控制需要考虑速度、加速度、转向等因素,以保证机器人能够按照预定路径进行导航。
二、实现方法1. 硬件设备:机器人智能导航系统的实现需要使用一系列硬件设备。
常用的硬件设备包括激光雷达、摄像头、声音传感器、运动控制器等。
这些设备需要具备高精度、低功耗、稳定性好等特点,以满足机器人导航的需求。
2. 软件算法:机器人智能导航系统的实现依赖于一系列软件算法。
路径规划算法、图像处理算法、运动控制算法等都是机器人导航的核心。
这些算法需要经过设计、实现和优化,以提高机器人导航的效率和准确性。
第二章工业机器人的机械结构和运动控制章节目录2.1 工业机器人的系统组成2.1.1 操作机2.1.2 控制器2.1.3 示教器2.2 工业机器人的技术指标学习目标导入案例课堂认知扩展与提高本章小结思考练习2.3 工业机器人的运动控制2.3.1 机器人运动学问题2.3.2 机器人的点位运动…2.3.3 机器人的位置控制课前回顾何为工业机器人?工业机器人具有几个显著特点,分别是什么?工业机器人的常见分类有哪些,简述其行业应用。
学习目标认知目标*熟悉工业机器人的常见技术指标*掌握工业机器人的机构组成与各部分的功能*了解工业机器人的运动控制能力目标*能够正确识别工业机器人的基本组成*能够正确判别工业机器人的点位运动和连续路径运动导入案例国产机器人竞争力缺失关键技术是瓶颈众所周知,中国机器人产业由于先天因素,在单体与核心零部件仍然落后于日、美、韩等发达国家。
虽然中国机器人产业经过 30 年的发展,形成了较为完善的产业基础,但与发达国家相比,仍存在较大差距,产业基础依然薄弱,关键零部件严重依赖进口。
整个机器人产业链主要分为上游核心零部件(主要是机器人三大核心零部件——伺服电机、减速器和控制系统,相当于机器人的“大脑”)、中游机器人本体(机器人的“身体”)和下游系统集成商(国内 95% 的企业都集中在这个环节上)三个层面。
课堂认知2.1 工业机器人的系统组成第一代工业机器人主要由以下几部分组成:操作机、控制器和示教器。
对于第二代与第三代工业机器人还包括感知系统和分析决策系统,它们分别由传感器与软件实现。
工业机器人系统组成2.1.1 操作机操作机(或称机器人本体)是工业机器人的机械主体,是用来完成各种作业的执行机构。
它主要由机械臂、驱动装置、传动单元与内部传感器等部分组成。
关节型机器人操作机基本构造机器人操作机最后一个轴的机械接口通常为一连接法兰,可接装不同的机械操作装置,如夹紧爪、吸盘、焊枪等。
(1) 机械臂关节型工业机器人的机械臂是由关节连在一起的许多机械连杆的集合体。
机器人智能控制系统的设计方法和参数调优机器人智能控制系统的设计是实现机器人高效运动和智能操作的关键。
在机器人领域,设计一个优秀的控制系统可以有效提高机器人的精确度、稳定性和执行能力。
本文将介绍机器人智能控制系统的设计方法和参数调优的相关内容。
一、机器人智能控制系统的设计方法机器人智能控制系统的设计需要从以下几个方面进行考虑。
1. 机器人建模: 首先,需要将机器人的动力学进行建模分析,确定机器人的结构、连接关系和动力学方程。
常见的建模方法包括运动学模型和动力学模型。
运动学模型用于描述机器人的位置和运动关系,动力学模型则进一步考虑机器人的力学特性和惯性。
2. 控制器设计: 在机器人的控制系统中,控制器的设计是至关重要的一环。
常见的控制器设计方法包括经典控制方法和现代控制方法。
经典控制方法包括PID控制器、模糊控制器和神经网络控制器等,现代控制方法包括自适应控制、最优控制和模型预测控制等。
根据机器人的具体应用场景和要求,选择适合的控制器设计方法。
3. 传感器选择与配置: 机器人的控制系统需要依赖传感器获取环境和机器人状态信息,因此传感器的选择和配置非常重要。
常见的机器人传感器包括激光雷达、摄像头、力/力矩传感器、惯性传感器等。
根据机器人的任务和环境,选择合适的传感器,并合理配置在机器人的各个部位。
4. 路径规划与运动控制: 机器人需要根据任务要求进行路径规划和运动控制。
在路径规划过程中,考虑机器人的动力学约束和障碍物避让等因素,生成合适的运动轨迹。
在运动控制中,需要实现机器人精确的位置跟踪和平滑的运动控制。
二、机器人智能控制系统的参数调优机器人智能控制系统的参数调优是提高系统性能和稳定性的重要环节。
以下是几种常见的参数调优方法。
1. PID参数调优: PID控制器是一种经典的控制器,其参数包括比例系数Kp、积分系数Ki和微分系数Kd。
常见的PID参数调优方法有试误法、Ziegler-Nichols方法和模糊PID调参等。