线性二次型最优控制概述
- 格式:ppt
- 大小:254.00 KB
- 文档页数:39
线性二次型最优控制一、最优控制概述最优控制,又称无穷维最优化或动态最优化,是现代控制理论的最基本,最核心的部分。
它所研究的中心问题是:如何根据受控系统的动态特性,去选择控制规律,才能使得系统按照一定的技术要求进行运转,并使得描述系统性能或品质的某个“指标”在一定的意义下达到最优值。
最优控制问题有四个关键点:受控对象为动态系统;初始与终端条件(时间和状态);性能指标以及容许控制。
一个典型的最优控制问题描述如下:被控系统的状态方程和初始条件给定,同时给定目标函数。
然后寻找一个可行的控制方法使系统从输出状态过渡到目标状态,并达到最优的性能指标。
系统最优性能指标和品质在特定条件下的最优值是以泛函极值的形式来表示。
因此求解最优控制问题归结为求具有约束条件的泛函极值问题,属于变分学范畴。
变分法、最大值原理(最小值原理)和动态规划是最优控制理论的基本内容和常用方法。
庞特里亚金极大值原理、贝尔曼动态规划以及卡尔曼线性二次型最优控制是在约束条件下获得最优解的三个强有力的工具,应用于大部分最优控制问题。
尤其是线性二次型最优控制,因为其在数学上和工程上实现简单,故其有很大的工程实用价值。
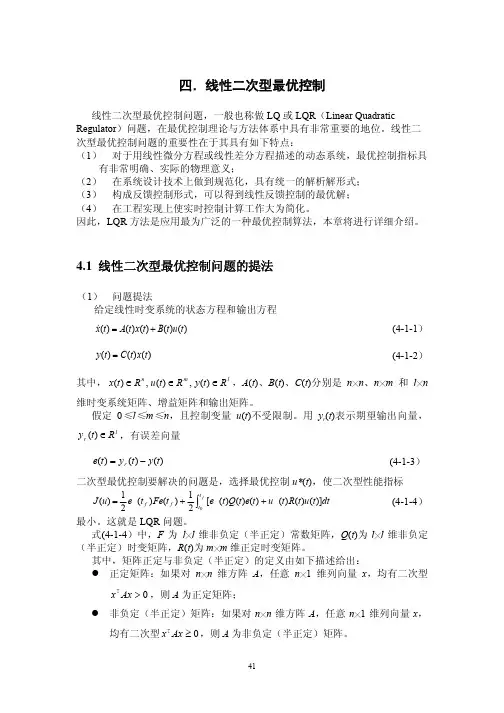
二、线性二次型最优控制2.1 线性二次型问题概述线性二次型最优控制问题,也叫LQ 问题。
它是指线性系统具有二次型性能指标的最优控制问题。
线性二次型问题所得到的最优控制规律是状态变量的反馈形式,便于计算和工程实现。
它能兼顾系统性能指标的多方面因素。
例如快速性、能量消耗、终端准确性、灵敏度和稳定性等。
线性二次型最优控制目标是使性能指标J 取得极小值, 其实质是用不大的控制来保持比较小的误差,从而达到所用能量和误差综合最优的目的。
2.2 线性二次型问题的提法给定线性时变系统的状态方程和输出方程如下:()()()()()()()()X t A t X t B t U t Y t C t X t ⎧=+⎨=⎩ (2.1))(t X 是n 维状态变量,)(t U 是m 维控制变量,)(t Y 是l 维输出变量,)(t A 是n n ⨯时变矩阵,)(t B 是m n ⨯时变矩阵。
离散双线性系统二次型最优控制的迭代算
法
离散双线性系统二次型最优控制是一种用于优化离散双线性系统的控制方法。
它的核心思想是通过迭代的方式,求解最优控制参数,从而使系统达到最优的性能。
在离散双线性系统中,假设控制参数为X,则根据控制参数X的变化,可以计算出系统的最优性能值Y。
在Y的计算中,一般包括两部分,一部分是系统的累计损失,另一部分是控制参数X的正则化项。
接着,通过迭代的方式,不断优化控制参数X,使得系统性能值Y 最大化。
在迭代过程中,采用梯度下降法,不断更新控制参数X,使得Y最大化。
每次迭代过程中,可以通过计算梯度的方式,找到控制参数X的最优解。
在计算出最优的控制参数X之后,可以得到离散双线性系统的最优性能值Y。
这样,就可以真正实现系统的最优控制。
综上,离散双线性系统二次型最优控制是一种有效的优化离散双线性系统的控制方法,它将梯度下降法和迭代过程结合起来,使得系统可以达到最优性能,从而实现系统的最优控制。
lqr控制器原理
LQR(线性二次型调节器)是一种基于状态反馈的最优控制策略,其原理主要包括以下步骤:
1. 确定状态方程模型:首先需要确定一个描述系统状态的动力学模型,通常以状态空间的形式给出。
2. 线性化处理:对状态方程进行线性化处理,将其转化为线性系统模型。
3. 定义目标函数:目标函数通常是系统状态和控制输入的二次型函数,用于评估控制性能的好坏。
4. 优化目标函数:通过设计状态反馈控制器,使得目标函数取最小值。
这意味着需要找到一个状态反馈控制律,使得系统的状态轨迹能够跟踪参考信号,同时控制输入的二次型能量最小。
5. 求解最优控制律:通过求解优化问题,可以得到最优控制律,即状态反馈控制器的增益。
这个增益可以用来调节系统的状态,以达到最优控制的目的。
6. 控制系统实现:将得到的增益值代入到实际控制系统中,通过闭环控制的方式对系统进行调节,以实现最优控制。
LQR控制器的优点包括:
1. 易于实现:LQR控制器通过线性二次型目标函数进行优化,其解具有封闭形式的解析解,易于计算和实现。
2. 鲁棒性好:LQR控制器对系统参数的变化和扰动具有较强的鲁棒性,能够在不确定环境下实现较好的控制效果。
3. 稳定性高:LQR控制器能够保证系统的状态轨迹收敛到平衡点,具有较好的稳定性和收敛性。
4. 可扩展性:LQR控制器可以与其他先进控制策略相结合,如模糊逻辑、神经网络等,以实现更复杂的控制任务。
总之,LQR控制器是一种有效的最优控制策略,广泛应用于各种线性系统的控制中。
通过合理地选择权矩阵Q和R,可以适应不同的控制要求和系统特性,实现最优控制。
线性系统二次型最优控制律线性系统二次型最优控制定义使用二次型性能指标的线性系统最优控制。
它可得到状态线性反馈的最优控制规律,便于实现闭环最优控制,是应用广泛的最优控制方式。
性能指标线性系统状态方程及输出方程为x(t)=A(t)x(t)+B(t)u(t) (1)y(t)=C(t)x(t) (2)式中x(t)为n维状态向量;u(t)为p维控制向量;y(t)为q维输出向量。
设z(t)为理想输出向量,与y(t)同维数,并定义e(t)=z(t)-y(t) (3)误差向量。
线性二次型最优控制问题的性能指标这里,权函数F、Q(t)为正半定矩阵,R(t)为正定矩阵。
假设tf固定。
要求寻找最优控制u*(t),使性能指标J为最小。
被积函数的第一项表明误差e(t)的大小,是非负的。
其第二项表明控制功率的大小,对应于u≠0它恒为正。
因此,对u(t)往往不需再加约束,而常设u(t)为自由的。
性能指标的第一项则表示终值误差。
状态调节器问题系统状态方程如式 (1)所示,u(t)不受约束,tf固定,性能指标为寻找最优控制u*(t),使性能指标J为最小。
用极小值原理或动态规划法,可得下列矩阵黎卡提微分方程(一阶非线性微分方程)P(t)=-P(t)A(t)-AT(t)P(t)+P(t)B(t)R-1(t)BT(t)P(t)-Q(t) (6) 其边界条件为P(tf)=F (7)由式(6)解出P(t)后,可得最优控制规律为u*(t)=-R-1(t)BT(t)P(t)x*(t) (8)由式(8)可以看出,最优控制规律是一个状态线性反馈规律,控制向量u*(t)由状态向量x*(t)生成,构成状态反馈,并且呈线性关系。
这样,能方便地实现闭环最优控制,这一点在工程上具有十分重要的意义。
P(t)是一对称矩阵,一般都要由计算机求出方程(6)的数值解。
P(t)是时间函数,即使线性系统是定常的,为了实现最优控制,反馈增益应该是时变的,而不是常值反馈增益。
线性二次型最优控制的MATLAB实现摘要线性二次型最优控制是一种普遍采用的最优控制系统设计方法。
使用MATLAB 软件设计的GUI控制界面实现最优控制,有较好的人机交互界面,便于使用。
线性二次型最优控制又叫做LQ最优控制或者称为无限长时间定常系统的状态调节控制器。
本文分别从连续系统线性二次型最优控制的MATLAB实现,离散系统相形二次型最优控制的MATLAB实现,最优观测器的MATLAB实现,线性二次性Guass 最优控制的MATLAB实现四个研究方案。
本论文就是从这四个方面分别以不同的性能指标设计不同的GUI界面以及不同的程序实现其功能并说明其各自的应用范围。
关键词:线性二次型,最优控制, GUI控制界面,最优观测器,Guass最优控制The Linear Quadratic Optimal Control of MATLABAbstractLinear quadratic optimal control is a widely used to optimal control system design method. Use of MATLAB software design GUI interface control to realize the optimal control, Have good man-machine interface, easy to use. The linear quadratic optimal control and called LQ optimal control or an infinite long time of the system state regulation and constant controller.This paper respectively from the continuous system linear quadratic optimal control MATLAB, Discrete system in quadratic optimal control MATLAB, The optimal observer MATLAB, sexual Guass linear quadratic optimal control MATLAB four research plan. This paper is from the four aspects of the performance index respectively in different design different GUI interface and Different programs that realize its function and their application scope.Keywords:Linear quadratic, The optimal control, GUI control interface, The best Guass observer, the optimal control目录1 引言 (1)1.1 概述 (1)1.2课题研究的背景、意义及研究概况 (1)1.3本文研究的主要内容 (2)2 最优控制的基本概念 (3)2.1最优控制基本思想 (3)2.2最优控制的性能指标 (3)2.2.1 积分型性能指标 (3)2.2.2 末值型性能指标 (5)2.3最优控制问题的求解方法 (5)3 最连续系统最优控制的MATLAB实现 (7)3.1连续系统线性二次型最优控制 (7)3.2连续系统线性二次型最优控制的MATLAB实现 (8)3.3连续系统线性二次型最优控制的MATLAB实现示例 (8)4 离散系统线性二次型最优控制的MATLAB实现 (17)4.1离散系统稳态线性二次型最优控制 (17)4.2离散系统线性二次型最优控制的MATLAB实现与示例 (18)5 最优观测器的MATLAB实现 (23)5.1 连续时不变系统的KALMAN滤波 (23)5.2K ALMAN滤波的MATLAB实现 (24)5.3K ALMAN滤波的MATLAB实现示例 (25)6 线性二次型GUASS最优控制的MATLAB实现 (31)6.1LQG最优控制的求解 (31)6.2LQG最优控制的MATLAB实现与示例 (32)7 结论 (37)参考文献: (38)致谢 (39)1 引言1.1 概述随着计算机技术的飞速发展,控制系统的计算机辅助设计与分析得到了广泛的应用,目前已达到了相当高的水平。
线性二次型最优控制
本文旨在探讨线性二次型最优控制的理论及其实际应用。
线性二次型控制是一种广泛使用的有效控制策略,用于解决复杂的系统问题。
本文以线性二次型的哲学和理论基础为主线,全面总结了线性二次型最优控制的哲学和原理,研究了它的实际应用,并介绍了理论与实践的关系。
首先,本文介绍了线性二次型最优控制的哲学和理论基础。
实践证明,线性二次型控制技术在它所面对的问题中具有优势。
线性二次型最优控制是一种基于目标的最优化控制技术,以有效地通过控制技术来实现有效的控制者。
其次,本文研究了线性二次型最优控制的实际应用。
实际应用中,线性二次型最优控制的最大特点在于它的非线性输入和输出行为。
基于该技术,可以构建一类实用性强的系统,以有效地满足实际应用中的复杂性及非线性性需求。
此外,线性二次型最优控制也可用于节能、飞行控制,机器人控制、智能汽车控制等领域的实际应用。
最后,本文介绍了线性二次型最优控制的理论与实践的关系。
在实践中,要求在有效消耗低的基础上实现有效控制,这要求模型与实践相结合。
只有通过深入理解和求解这种关系,才能有效地利用这种理论在实践中得到最优的控制效果。
总之,线性二次型最优控制作为一种有效的最优化控制策略,极大地促进了复杂系统的发展和应用,同时为更加高效和可靠的实践应用提供了有效的方案。
本文为线性二次型最优控制的哲学和理论研究
以及实际应用提供了一个全面的研究和探讨,以帮助更好地理解和应用这种控制策略。
一、主动控制简介概念:结构主动控制需要实时测量结构反应或环境干扰,采用现代控制理论的主动控制算法在精确的结构模型基础上运算和决策最优控制力,最后作动器在很大的外部能量输入下实现最优控制力。
特点:主动控制需要实时测量结构反应或环境干扰,是一种需要额外能量的控制技术,它与被动控制的根本区别是有无额外能量的消耗。
优缺点:主动控制具有提高建筑物的抵抗不确定性地面运动,减少输入的干扰力,以及在地震时候自动地调整结构动力特征等能力,特别是在处理结构的风振反应具有良好的控制效果,与被动控制相比,主动控制具有更好的控制效果。
但是,主动控制实际应用价格昂贵,在实际应用过程中也会存与其它控制理论相同的问题,控制技术复杂、造价昂贵、维护要求高。
组成:传感器、控制器、作动器工作方式:开环、闭环、开闭环。
二、简单回顾主动控制的应用与MATLAB应用1.主动变刚度A VS控制装置工作原理:首先将结构的反应反馈至控制器,控制器按照事先设定好的控制算法并结合结构的响应,判断装置的刚度状态,然后将控制信号发送至电液伺服阀以操纵其开关状态,实现不同的变刚度状态。
锁定状态(ON):电液伺服阀阀门关闭,双出杆活塞与液压缸之间没有相对位移,斜撑的相对变形与结构层变形相同,此时结构附加一个刚度;打开状态(OFF):电液伺服阀阀门打开,双出杆活塞与液压缸之间有相对位移,液压缸的压力差使得液体发生流动,此过程中产生粘滞阻尼,此时结构附加一个阻尼。
示意图如下:2. 主动变阻尼A VD控制装置工作原理:变孔径阻尼器以传统的液压流体阻尼器为基础,利用控制阀的开孔率调整粘性油对活塞的运动阻力,并将这种阻力通过活塞传递给结构,从而实现为结构提供阻尼的目的。
关闭状态(ON):开孔率一定,液体的流动速度受限,流动速度越小,产生的粘滞阻尼力越大,开孔率最小时,提供最大阻尼力,此时成为ON状态;打开状态(OFF):控制阀完全打开,由于液体的粘滞性可提供最小阻尼力。