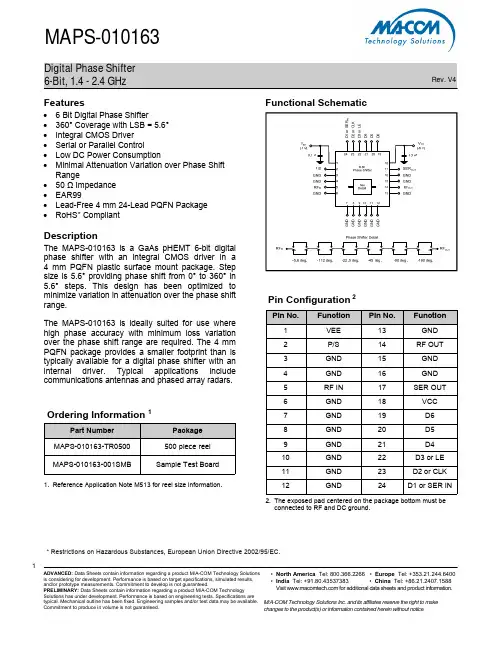
数字移相器MAPS-010163
- 格式:pdf
- 大小:661.81 KB
- 文档页数:7

360°模拟移相器平衡插入损耗和拓宽频带的研究
刘克;田小建;衣茂斌;刘悦
【期刊名称】《微波学报》
【年(卷),期】2000(16)5
【摘要】本文论证了用电阻补偿法平衡360°模拟移相器插入损耗波动的正确性 ,并推导出确定移相器频带宽度的目标函数 ,籍 CAD给出移相器在最大带宽条件下的有关设计参量 ,通过直观曲线为选择变容二极管作理论依据。
采用微波集成电路工艺制作的模拟移相器在 1.3~ 2 .1GHz范围内可获得360°连续可变相移 ,最大调相电压 18V,中心频率线性度优于± 2 .5% ,插入损耗波动小于 3d B。
【总页数】5页(P624-627)
【关键词】频带;插入损耗波动;线性移相;模拟移相器
【作者】刘克;田小建;衣茂斌;刘悦
【作者单位】集成光电子国家重点联合实验室吉林大学实验区;石家庄电子工业部第十三研究所
【正文语种】中文
【中图分类】TN623
【相关文献】
1.C波段反射型线性360°模拟移相器的设计 [J], 谢萍;邓军;田小建
2.宽频带L波段360°模拟信号移相器的设计 [J], 刘克;田小建;刘悦;衣茂斌
3.宽频带360度电控移相器 [J], 蒋依群;蒋君章
4.抵损耗360°X波段模拟移相器 [J], Upsh.,JI;范进先
5.X波段360°模拟移相器的设计 [J], 冷家波
因版权原因,仅展示原文概要,查看原文内容请购买。

技术细节1.要件速览 42.尺寸图 6 2.1DMK 33GP1300e 带脚架适配器的C型接口 (6)2.2DMK 33GP1300e 不带脚架适配器的C型接口 (7)2.3DMK 33GP1300e 带脚架适配器的CS型接口 (8)2.4DMK 33GP1300e 不带脚架适配器的CS型接口 (9)3.I/O 连接器 10 3.16-pin I/O 连接器 (10)3.1.1TRIGGER_IN (10)3.1.2STROBE_OUT (11)4.光谱特征 124.1光谱灵敏度 - P1300 (12)5.相机控制 13 5.1传感器读出控制 (13)5.1.1像素格式 (13)5.1.1.18-Bit Monochrome (13)12-Bit Packed Monochrome (13)5.1.1.25.1.1.316-Bit Monochrome (14)5.1.2分辨率 (14)5.1.3读出模式 (14)5.1.4帧速率 (15)5.1.5局部扫描偏移 (16)5.2图像传感器控制 (16)5.2.1曝光时间 (17)5.2.2增益 (17)5.3自动曝光及增益控制 (17)5.3.1自动曝光 (18)自动增益 (18)5.3.25.3.3自动参考值 (18)5.3.4强光缩减 (18)5.3.5自动曝光限制 (19)5.3.6自动增益限制 (19)5.4触发 (20)5.4.1触发模式 (20)5.4.2触发极性 (20)5.4.3软件触发 (21)5.4.4触发脉冲计数 (21)5.4.5触发源 (21)5.4.6触发重叠 (22)5.5触发定时参数 (22)5.5.1触发延迟 (22)5.5.2触发去抖时间 (22)5.5.3触发遮罩时间 (23)5.5.4触发噪声抑制时间 (23)5.6数字I/O (23)5.6.1通用输入 (23)5.6.2通用输出 (24)5.7频闪 (24)5.7.1频闪启用 (24)5.7.2频闪极性 (25)频闪操作 (25)5.7.35.8图像处理 (25)5.8.1伽玛 (25)5.8.2查找表 (25)5.9自动功能感兴趣的区域 (26)5.9.1自动功能ROI启用 (27)5.9.2自动功能ROI预设 (27)5.9.3自动功能ROI自定义矩形 (27)5.10用户设置 (28)5.10.1用户设置选择器 (28)5.10.2加载用户设置 (29)5.10.3保存用户设置 (29)5.10.4默认用户配置 (29)5.11精确时间协议 (29)5.11.1PTP 启用 (29)5.11.2PTP 状态 (30)5.12动作调度器 (30)5.12.1功能选择 (30)5.12.2预定动作时间 (30)5.12.3预定动作间隔 (31)5.12.4预定动作执行 (31)5.12.5预定动作取消 (31)5.13事件 (31)配置事件 (32)5.13.15.13.2事件通知 (32)5.13.3曝光结束事件 (32)5.13.4帧触发丢失事件 (33)5.13.5L ine1 下降沿事件 (33)5.13.6L ine1 上升沿事件 (33)5.13.7测试事件 (34)6.R e v i s i o n H i story 351要件速览2尺寸图2.1DMK 33GP1300e 带脚架适配器的C型接口2.4DMK 33GP1300e 不带脚架适配器的CS型接口3I/O 连接器3.16-pin I/O 连接器相机后视图1开极闸M OS F E T最大限制0.2A(ID)!2启动电流最低条件3.5 m A!3 G:地O:输出I:输入3.1.1TR IGG ER_I NTRIGGER_IN线可用于将曝光时间的开始与外部事件同步。
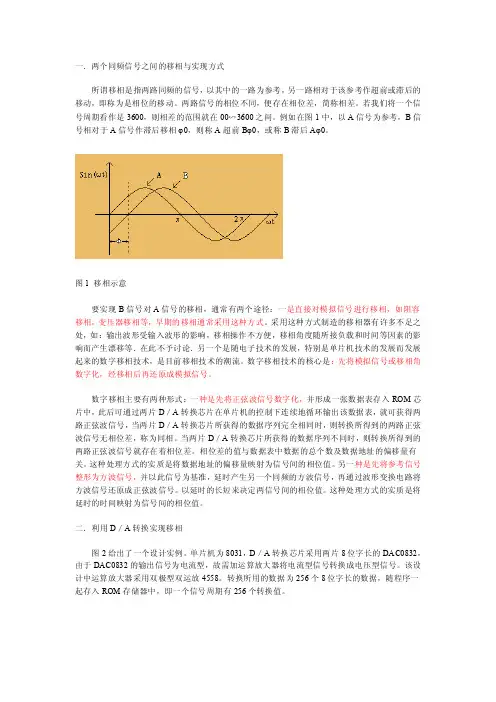
一.两个同频信号之间的移相与实现方式所谓移相是指两路同频的信号,以其中的一路为参考,另一路相对于该参考作超前或滞后的移动,即称为是相位的移动。
两路信号的相位不同,便存在相位差,简称相差。
若我们将一个信号周期看作是3600,则相差的范围就在00∽3600之间。
例如在图1中,以A信号为参考,B信号相对于A信号作滞后移相φ0,则称A超前Bφ0,或称B滞后Aφ0。
图1 移相示意要实现B信号对A信号的移相,通常有两个途径:一是直接对模拟信号进行移相,如阻容移相,变压器移相等,早期的移相通常采用这种方式。
采用这种方式制造的移相器有许多不足之处,如:输出波形受输入波形的影响,移相操作不方便,移相角度随所接负载和时间等因素的影响而产生漂移等.在此不予讨论.另一个是随电子技术的发展,特别是单片机技术的发展而发展起来的数字移相技术,是目前移相技术的潮流。
数字移相技术的核心是:先将模拟信号或移相角数字化,经移相后再还原成模拟信号。
数字移相主要有两种形式:一种是先将正弦波信号数字化,并形成一张数据表存入ROM芯片中,此后可通过两片D/A转换芯片在单片机的控制下连续地循环输出该数据表,就可获得两路正弦波信号,当两片D/A转换芯片所获得的数据序列完全相同时,则转换所得到的两路正弦波信号无相位差,称为同相。
当两片D/A转换芯片所获得的数据序列不同时,则转换所得到的两路正弦波信号就存在着相位差。
相位差的值与数据表中数据的总个数及数据地址的偏移量有关。
这种处理方式的实质是将数据地址的偏移量映射为信号间的相位值。
另一种是先将参考信号整形为方波信号,并以此信号为基准,延时产生另一个同频的方波信号,再通过波形变换电路将方波信号还原成正弦波信号。
以延时的长短来决定两信号间的相位值。
这种处理方式的实质是将延时的时间映射为信号间的相位值。
二.利用D/A转换实现移相图2给出了一个设计实例。
单片机为8031,D/A转换芯片采用两片8位字长的DA C0832,由于DAC0832的输出信号为电流型,故需加运算放大器将电流型信号转换成电压型信号。
第二章地图扫描与图像处理从本章开始,我们即将按照数据采集的一整套流程系统的进行讲解。
本章主要内容是数据采集的前期预处理部分,我们从一张纸质地图入手,介绍如何将纸质地图变成存储在计算机中的栅格地图(即地图扫描)以及扫描后栅格地图的图像处理,最终的地图作为GIS数据采集的数据源。
通过本章的学习,能够学会用工程扫描仪扫描大幅面纸质地图,熟练使用图像处理软件简单处理栅格地图。
2.1 地图扫描2.1.1 概述GIS数据有一个很重要的来源是纸质地图,而纸质地图需要转换成计算机能识别的栅格地图才能用GIS软件进行矢量化,我们必须借助于扫描仪才能完成纸质地图转换成栅格地图的过程。
由于GIS所涉及到的纸质地图大多数幅面较大,所以在GIS地图扫描中主要应用工程扫描仪来解决此类问题。
本节主要介绍工程扫描仪的相关性能指标及其应用。
2.1.2工程扫描仪的主要性能指标1、分辨率分辩率指的是每英寸上所能容纳的颜色点数量。
在一个固定的平面内,分辨率越高,意味着可使用的点数越多,图像越细致。
工程扫描仪的分辨率主要有三种:光学分辨率、机械分辨率和插值分辨率。
光学分辨率是衡量扫描仪感光元器件精密程度的参数。
其定义是:在横方向上,每英寸距离内,感光元器件所能获取的最多真实像素数。
光学分辨率代表扫描的真实精度。
机械分辨率是衡量扫描仪传动机构工作精密程度的参数。
定义是:在纵方向上,扫描头每移动1英寸,步进电机所走过的最多步数。
例如:扫描仪参数:600×1200dpi ,600dpi即是光学分辨率,1200dpi即是机械分辨率。
插值分辨率:是指在真实的扫描点基础上插入一些点后形成的分辨率。
因为插值分辨率毕竟是生成的点而不是真实扫描的点,所以,虽然提高分辨率增加了图像的细致率,但细节上跟原来的图形会有一定程度的差异,并不代表扫描的真实精度。
而光学分辨率虽然数值较小,但它代表扫描的真实精度。
2、灰度级灰度级是表示灰度图像的亮度层次范围的指标,灰度级数越多表示扫描图像的亮度范围越大,层次越丰富。