整杆式甘蔗收割机液压系统设计与分析
- 格式:pdf
- 大小:259.51 KB
- 文档页数:4
甘蔗收割机设计甘蔗收获机械技术一直是限制我国甘蔗生产全程机械化的关键技术。
切割器是甘蔗收获机的关键部件,其性能优劣直接关系到收获效率和甘蔗破头率,影响甘蔗第2年的生长。
因此,切割装置一直是甘蔗收割机设计的核心部件。
近几年来,国内不少高校教师和学生针对甘蔗收割机切割器的切割质量进行不同方面的研究,尤其是广西大学的专家及一些资深人士,主要研究田间地面不平引起的频率与振幅等振动原因,以及切割器的结构参数和运动参数对切割性能的影响。
国外(如泰国、澳大利亚、日本等甘蔗主要产区)也对甘蔗收割机的切割装置的机理进行深度研究,主要针对刀片的切割角度、刀盘倾角、刀盘转速对切割器的影响及刀片的不同形状(月牙形、梯形和矩形等)对切割质量的影响等方面。
但是目前这些切割装置还存在着许多问题,如性能、制造成本和切割质量等因素亟待进一步探索研究。
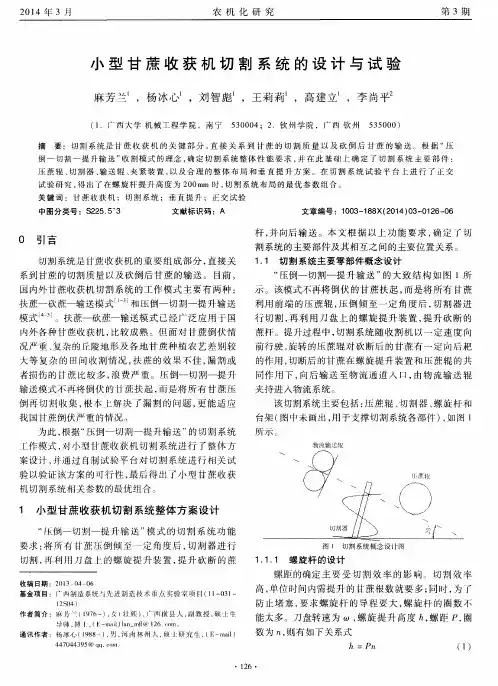
1工作原理甘蔗收割机在收割过程中,首先用螺旋杆扶蔗器扶正由于受天气影响倒伏的甘蔗;然后,利用双圆盘上的刀片进行切割;接着,利用旋转轴旋转将砍下来的甘蔗输送到通道装置,切割后的甘蔗在通道工作区域进行拨叶和分叶,最后将甘蔗输送出去进行集堆并整理。
2切割装置的模型2.1.1模型设计本文设计的甘蔗收割机切割装置主要由齿轮箱、左切割组件和右切割组件等3部分组成。
切割组件包括圆形刀盘、旋转支撑轴和刀片。
刀盘安装在旋转轴的最下端,6把刀片均匀安装在刀盘的圆周周围且在刀盘的底面,切割器刀片刀刃的一边伸出到刀盘以外,以螺钉的形式固定;齿轮箱内安装有相互联系的齿轮组传动且与旋转轴套的顶端连接,为了避免切割过程中的刀具碰刀和撞刀等问题,双圆盘上的刀片设计成交错设置。
本次甘蔗收割机的设计主要是针对甘蔗收割过程中切割损坏、喂入及输送甘蔗的能力进行了考虑,有效防止了甘蔗的堵塞和损伤。
2.1.2工作原理甘蔗收割机在收割过程中,首先用螺旋杆扶蔗器扶正由于受天气影响倒伏的甘蔗;然后,利用双圆盘上的刀片进行切割;接着,利用旋转轴旋转将砍下来的甘蔗输送到通道装置,切割后的甘蔗在通道工作区域进行拨叶和分叶,最后将甘蔗输送出去进行集堆并整理。
甘蔗联合收割机通常由切割和收集系统、输送系统、卸料系统、动力系统和控制系统等部分组成。
下面是一个基本的甘蔗联合收割机设计方案的框架:1. 切割和收集系统-切割装置:选择合适的刀具或切割机构,以确保高效、干净地将甘蔗切割成段。
-收集装置:设计收集甘蔗的装置,可以是传送带、输送机或其他收集装置,以便将切割好的甘蔗段收集到一定的容器中。
2. 输送系统-输送带:设计输送带系统,用于将收集好的甘蔗段输送到后续的加工设备或储存容器中。
3. 卸料系统-卸料装置:设计卸料装置,用于将收集好的甘蔗段卸载到储存容器或其他设备中,可以考虑采用卸料臂、卸料皮带等方式。
4. 动力系统-动力来源:选择合适的动力来源,可以是内燃机、电动机等,确保能够提供足够的动力来驱动整个机械系统。
5. 控制系统-电子控制:设计自动化控制系统,用于监控和控制整个甘蔗收割机的运行,包括发动机控制、切割系统控制、输送系统控制等。
6. 结构设计-机械结构:根据甘蔗收割机的工作需求和使用环境,设计坚固耐用的机械结构,确保机器在不同地形和工作条件下能够稳定运行。
7. 安全和人性化设计-安全装置:设置必要的安全装置,如紧急停止按钮、防护罩等,确保操作人员的安全。
-人性化设计:考虑操作人员的操作习惯和舒适度,设计符合人体工程学的操作界面和工作环境。
8. 测试和调试-原型制作:制作甘蔗联合收割机的原型机进行测试,验证各系统的性能和可靠性。
-调试优化:对原型机进行调试和优化,确保甘蔗联合收割机的各项功能都能够正常工作。
以上是一个基本的甘蔗联合收割机设计方案的框架和基本步骤,具体实施时需要根据具体要求和条件进行调整和完善。
如果需要更详细的设计方案或技术支持,建议咨询相关领域的专业人士或工程师。
第16卷第12期2004年12月计算机辅助设计与图形学学报JO U RNA L OF COM P U T ER -AI DED D ESIGN &COM P U TER G RA PHI CS Vol .16,N o .12Dec .,2004原稿收到日期:2003-09-09;修改稿收到日期:2003-10-28.本课题得到国家自然科学基金(59965001)和广西壮族自治区科技攻关资助项目(0235008-5)资助.蒋占四,男,1977年生,硕士,主要研究方向为先进制造技术.李尚平,男,1956年生,博士,教授,主要研究方向为先进制造技术、先进加工与精密测试技术、制造业信息化.邓劲莲,女,1972年生,硕士,讲师,主要研究方向为先进制造技术. 产品开发集锦甘蔗收割机械智能设计系统的研究开发蒋占四1)李尚平2)邓劲莲1)1)(广西大学机械工程学院 南宁 530004)2)(广西工学院 柳州 545006)摘要 提出建立以设计、评价专家系统及参数化建模技术为核心的甘蔗收割机械智能设计系统.阐述了该系统的总体结构及各主要模块的功能描述与设计分析,论述了其关键技术;并以I -DEA S 软件作为虚拟产品开发平台,用Visual C ++开发出原型系统.关键词 甘蔗收割机;专家系统;智能设计;面向对象;参数化建模;虚拟样机中图法分类号 T P391Knowledge Based Intelligent Design System for Sugarcane HarvesterJiang Zhansi 1) Li Shangping 2) Deng Jinlian 1)1)(Institu te of Mechan ical Engineer ing ,Guangxi U niversity ,Nanning 530004)2)(Guang xi Univer s ity of Technol ogy ,Liuzhou 545006)A bstract Based on ex ploiting the techniques of expert sy stem and parametric modeling ,a sug arcane harvester intelligent desig n system (SHIDS )w as developed on I -DEAS platform w ith Visual C ++.The overall architecture ,functions and implementation of the main modules are discussed .Key words sugarcane harvester ;expert sy stem ;intelligent design ;object oriented ;parametric model -ing ;virtual pro totyping1 引 言我国是甘蔗种植和产糖大国,研发甘蔗联合收割机械,实现甘蔗收割机械化对于提高甘蔗收获劳动生产率、降低蔗糖生产成本、提升我国蔗糖的国际竞争力具有重要的实用价值和战略意义.然而,我国目前研发的甘蔗联合收割机存在诸如适应性差、可靠性较差及田间通过性差等问题.此外,我国60%~70%的甘蔗种植在丘陵地带,国外大型甘蔗收割机械价格昂贵且不适应.因此,应用现代设计方法,研发针对丘陵地带甘蔗种植和生长特点(倒伏、弯曲严重)、适应我国农村生产方式和农民购买能力及糖厂加工工艺的实用型甘蔗联合收割机械显得尤为必要和紧迫[1].甘蔗收割机械属于复杂机电产品,其设计既包括整机机型、功能部件的选择,又包括关键部件的功能设计、结构尺寸计算优化、空间布局的优化和功率匹配等,是集专家决策推理、数值计算、仿真优化于一体的过程.在甘蔗收割机械的设计中,引入专家系统技术和参数化建模技术,有利于建立面向整个设计过程,并同时满足数值计算、知识推理和图形处理的动态设计对象模型[2],从而为甘蔗收割机械的创新设计、发散设计及系列化设计提供可靠的技术支撑,推动甘蔗收割机械数字样机和物理样机的迅速研发.本文在收集、分析甘蔗收割机械设计资料和设计经验的基础上,建立了以设计、评价专家系统及参数化建模技术为核心的甘蔗收割机械智能设计原型系统———SH IDS (Sug arcane H arvester Intelligent De -sign Sy stem ).2 系统的总体结构和功能2.1 总体结构机械设计是一个“设计—评价—再设计”的创新过程.智能设计系统就是将这一设计过程用计算机辅助实现,在此基础上开发出数字样机并缩短物理样机的研发周期.SHIDS 包括设计、分析专家系统和图形输出两大核心模块,因此,这两大模块的设计及其有效集成成为该系统研究的重点.在SHIDS 中,专家系统利用面向对象方法、数据库技术、知识库技术得以实现;同时在参数化建模软件I -DEAS 的基础上,通过专家系统辅助设计获取有效的主参数驱动生成数字样机,从而实现图形输出.专家系统和参数化建模系统之间的集成利用I -DEAS 提供的二次开发工具Open I -DEAS 通过C ++编程实现.系统总体结构如图1所示.图1 SHI DS 总体结构2.2 系统功能SHIDS 符合“Top —Dow n ”的设计模式.首先针对用户提出的设计要求和使用条件(如收割效果、甘蔗生长状况、地形等)完成甘蔗收割机的功能设计和总体布局设计,并返回给用户若干个可行的设计方案,通过友好的用户界面,用户可根据各方案的评价及其可信度进行选择;然后,进入甘蔗收割机各关键部件的结构设计和参数设计;再以设计获得的主参数驱动生成数字样机.此外,用户可通过I -DEAS 软件自身提供的强大功能进行仿真分析,其分析结果可以作为评价专家子系统进行评价的依据.若不满足要求则返回重新设计,最后得到用户满意的设计结果,并把设计成功的结果作为实例存储.在整个过程中,系统的解释模块将对设计过程和结果提供合理的解释.3 系统各主模块的功能及实现策略3.1 设计知识的组织甘蔗收割机械属于复杂机电产品,但其各关键部件又具有相对独立性.根据人工智能原理中的问题归约法[3],在SHIDS 中,甘蔗收割机械的设计任务划分为扶蔗子系统、砍蔗子系统、输送子系统、断尾子系统、剥叶子系统、总体设计等一系列相对独立在不同层次上的子任务.在完成某一层次上的设计任务时,只使用一定范围的知识.所以设计知识也按子任务分类,各个子任务对应着一个或多个子知识库,目标级推理求解各子问题时,只需要搜索有限个相关的子知识库即可以提高推理机的搜索效率.层次化知识库组织模型如图2所示.175512期蒋占四等:甘蔗收割机械智能设计系统的研究开发图2 层次化知识库组织模型3.2 设计知识的表达与推理SHIDS 采用面向对象的技术和数据库技术来实现知识的表达.系统中各设计子对象被定义成类,设计对象的属性(包括性能参数、结构参数等)定义成类的数据成员,设计对象参数的计算、设计知识处理、规则推理以及推理控制策略则被定义成类的成员函数,“封装”在设计对象的类结构中.这样,一个设计过程就转变成设计对象类的实例化过程,其中设计对象类的定义粗略说明如下:Class CDesignObject {CObList m parameterL ist ;//设计对象属性链表,链表结点存放的是参数类对象.参数类含有参数名、参数值及对应的解释等数据成员BOO L Reas on 1();//规则推理成员函数.包含参数的计算、设计知识处理、规则推理等功能BOO L Reason 2();//规则推理成员函数void Control ();//推理控制策略成员函数}图3 规则库的E -R 实体模型图在SHIDS 中,规则形式的领域专家知识由多个关系数据库文件组成.规则的一般表现形式为If X Then (Y ,CON ).其中,X 称为规则前项,是一系列条件的组合,即X =X 1∧X 2∧…∧X n 用来表示前提;Y 称为后项,用来表示结论;CON 表示置信度.可设计规则库的E -R 实体模型如图3所示.根据该E -R 模型图可设计出规则库的结构和各数据表的结构.因此,产生式规则的推理就可充分利用数据库的关联技术、索引技术等提高推理效率.在SHIDS 中,主要依靠在设计对象的规则推理成员函数中嵌入SQL (结构化查询语句)来实现推理.3.3 参数化建模模块及其与专家系统的集成为了解决设计型专家系统在知识推理、智能计算及图形处理等方面综合求解的能力,提高其与CAD 的通信协调能力,本文的一个研究重点就是实现专家系统与CAD 的集成.SHIDS 以参数化建模软件I -DEAS 作为虚拟产品开发平台,以Open I -DEAS 为开发工具,用C ++语言实现设计专家系统与参数化建模模块的集成,其实现步骤如下:Step1.设计者从用户需求中提出初始设计参数和技术要求进行方案设计,进而获得设计所需的特征主参数(即能够独立变化的特征参数).Step2.参数设计专家系统通过访问参数算法库、数据库,根据特征主参数驱动获得设计所需的其他参数.Step3.根据设计参数,通过Open I -DEAS 访问I -DEAS 中的参数化模型库,提取相应的参数化模型,并修改其关键尺寸获得所需的部件模型.Step4.对各部件进行仿真分析,若不合乎要求则重新设计;否则,通过O pen I -DEAS (OI Assembly 对象)将各关键部件装配成整机.Step5.进行整机性能分析,若合乎要求则设计完成;否则,返回重新设计.图4 SHIDS 运行实例图4 结 论本文从实用的角度探讨基于领域知识的专家系统技术和虚拟样机技术及其在甘蔗收割机械设计中的应用,达到缩短甘蔗收割机械产品开发周期、降低开发成本、提高产品设计质量的目的,从而为甘蔗收割机械的尽快研发提供可靠技术支持.目前,我们以I -DEAS 软件作为虚拟产品开发平台,用Visual C ++开发出的SHIDS 原型系统基本能达到设计目标.系统运行实例如图4所示.1756计算机辅助设计与图形学学报2004年我们在SHIDS的研发过程中,得出以下几点结论:(1)引入现代设计方法是尽快研制出适于我国甘蔗种植、加工状况的甘蔗收割机械的重要途径;(2)传统的设计型专家系统在智能计算、过程控制、图形处理等各方面综合求解设计问题的能力还很有限[2].因此,把传统的人工智能应用(专家系统)、CAD以及建摸技术结合起来建立基于知识的智能建模和仿真系统是今后智能设计系统的一个重要发展方向;(3)面向对象的思想和方法将知识和知识的运用封装在类中,符合人类的认知思维,因而适用于解决人工智能问题,尤其适用于建造专家系统;(4)利用关系数据库建立产生式规则库能有效地进行知识管理、学习、解释和自然语言理解.同时,利用关系数据库的关联、索引技术可使产生式规则的推理更简单、高效.参 考 文 献[1]M eng Yanmei,Li Shangping,Liu Zhengshi,et al.Visual vir-tual design platform for sugarcane harvester[J].Journal ofComputer-Aided Design&Computer Graphics,2002,14(11):1096~1100(in Chinese)(蒙艳玫,李尚平,刘正士,等.甘蔗收获机械可视化虚拟设计平台的研究开发[J].计算机辅助设计与图形学学报,2002,14(11):1096~1100)[2]Liu Youyuan.Res earch and development of design-cycle-orient-ed adaptive expert system(high l evel synthesis)[D].Wuhan:Wuhan Institute of Technology,2000(in Chinese)(刘有源.面向产品设计全过程的适应性设计型专家系统研究与开发[博士学位论文].武汉:武汉理工大学,2000) [3]Cai Zixing,Xu Guangyou.Artificial Intelligence Principles&Applications[M].2nd ed.Beijing:Tsinghua University Press,1996(in Chines e)(蔡自兴,徐光佑.人工智能及其应用[M].第2版.北京:清华大学出版社,1996)175712期蒋占四等:甘蔗收割机械智能设计系统的研究开发。
甘蔗机收切断式和整秆式两种模式技术比较分析我国甘蔗联合收获机械有整秆式和切段式两种作业模式。
目前,存量占比情况大概是切段式≥99%,整秆式≤1%。
切段式作业的流程是切割、收集、转运,整秆式流程是收割、堆放、转运。
需要说明的是,割铺机不属于整秆式收割机,其功能仅仅是完成切割环节,不具备联合作业功能,且作业效率低,故不在本文讨论范围之内。
一、我国甘蔗机收的产业链条在讨论之前,这个问题需要先交代清楚。
与其他作物不一样的是,甘蔗机收的参与者较多,涉及到机收公司、蔗农、运输公司、糖厂等各方利益,形成了一个甘蔗机收产业链条,能否兼顾各方参与者的关键指标并平衡链条上的利益,是完成甘蔗机收的基本条件。
各方参与者的指标要求也不尽相同,比较一致的关键指标有作业效率、损失率、破头率、运输效率、含杂率等。
但是,侧重点各有不同,糖厂更关注含杂率、甘蔗品质;蔗农对宿根破头率、损失率、地块损伤和压实有要求;机收公司则关注作业效率、油耗、运营费用、折旧占比等指标;运输公司对装载量有特殊要求。
二、甘蔗机收各环节要求和约束条件(一)收割环节1.入土或贴土收割。
优势:的种植成本。
(二)运输环节对有效装载量有要求。
切段式:甘蔗短,蔗叶少。
整秆式:蔗叶少,甘蔗之间空隙少。
(三)进糖厂环节1.含杂率低。
优势:带走糖分少;能减轻榨糖设备磨损;可降低糖厂负荷,尤其非甘蔗杂质。
约束条件:蔗叶少,收割效率高的机型需建立主风机外的除叶系统;泥土砂石等杂质较少,收割设备需配切断前的除杂装置;要求切稍合适;蔗笋较少。
2.破损率低(甘蔗品质好)。
优势:能降低损失率和糖分损失;可延长收割后甘蔗的存放时间,尤其对整秆式。
约束条件:压入、喂入、砍刀位置适当;各部分的线速度匹配合理,通道内后排输送辊的线速度应逐渐加速,但并不是速度越快越好;与甘蔗接触部分无论结构、材料尽可能用不伤甘蔗的技术,尤其对整秆式更是如此。
需要特别说明的是:虽然甘蔗损伤不是切段式重点关注的指标,但过大损伤会造成较多损失率,并对甘蔗出糖率造成较大影响;甘蔗损伤对整秆式的影响除了和切段式相同外,还影响储存,所以是整秆式较重要的指标之一。
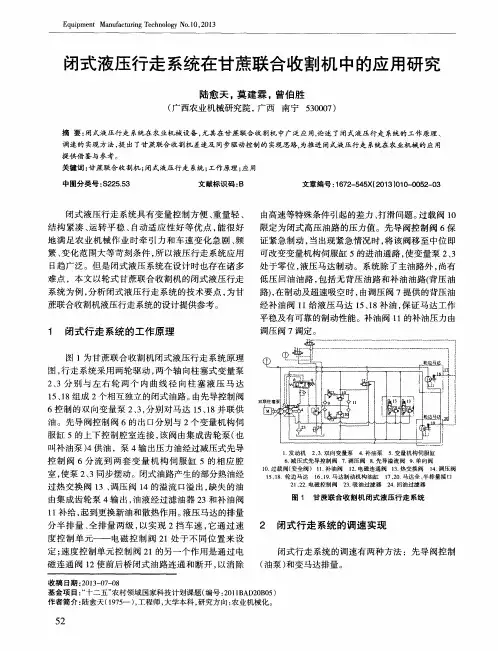
甘蔗收割机电液控制系统设计张尧;蒙杨超;肖泽桦;董自安【期刊名称】《流体传动与控制》【年(卷),期】2015(0)3【摘要】The typical working conditions of sugar cane harvester were analyzed. And the automatic control working conditions and clogged processing conditions are analyzed in detail, which these two conditions are superior to tradi-tional jobs. Besides, each subsystem is analyzed and the control scheme is designed, and EPEC2023 controllers with high reliability and EPEC2025 display are selected. Then, according to the control parameters and controller pins feature table, the allocation of controller pins is completed reasonably and its CAN bus system architecture design is completed. Finaly, the main program flow control system preparation is also carried out.%对甘蔗收割机的典型工况进行了分析。
其中,详细分析了自动控制工况以及堵塞处理工况这两种优于传统作业的工况,并对各子系统进行了控制方案的分析与设计;选用了具有高可靠性的EPEC2023控制器和EPEC2025显示器;然后根据控制参量汇总表以及控制器的针脚特性,对控制器的针脚进行了合理的分配;通过分析,完成了对其CAN总线系统结构的设计和控制系统主要程序流程图的编写。
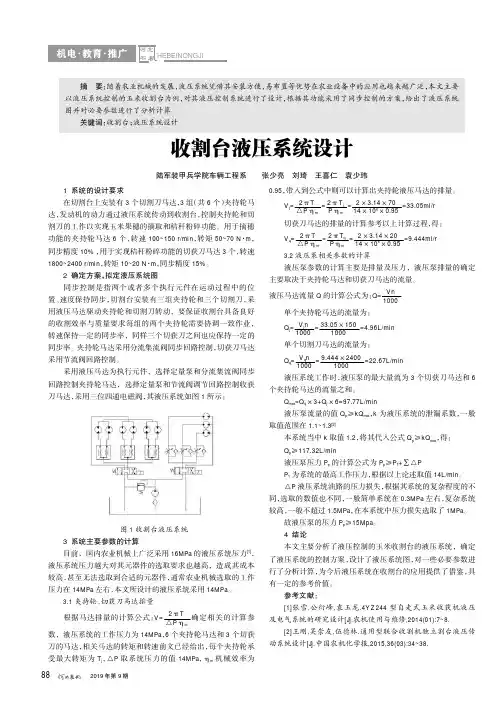
甘蔗联合收割机液压系统设计方案模糊综合评价法
陈远玲;黄芸茗;麻芳兰;任瑞文;杨冰心;李尚平
【期刊名称】《液压与气动》
【年(卷),期】2011(000)011
【摘要】提出了五种甘蔗收割机液压系统的设计方案,分析了工作可靠性、节能性、操纵性、集成度、经济性、维护性等诸多模糊因素对系统设计的影响;通过运用模糊综合评价法把定性方式描述的各种因素,转化成为用定量方式来描述,并且借鉴了
专家的知识经验,对五种设计方案根据不同阶段分别]确定权重,进行评价,最后确定
了各个阶段最佳的设计方案.
【总页数】4页(P71-74)
【作者】陈远玲;黄芸茗;麻芳兰;任瑞文;杨冰心;李尚平
【作者单位】广西大学机械工程学院,广西南宁530004;广西大学机械工程学院,广
西南宁530004;广西大学机械工程学院,广西南宁530004;广西大学机械工程学院,
广西南宁530004;广西大学机械工程学院,广西南宁530004;广西大学机械工程学院,广西南宁530004
【正文语种】中文
【中图分类】TH137
【相关文献】
1.甘蔗联合收割机液压系统节能初探 [J], 朱其崇;莫建霖
2.基于区间数TOPSIS法的甘蔗联合收割机液压系统设计方案评估 [J], 单晓敏;王
丛瑞;黄云战;吴晓强
3.整杆式甘蔗联合收割机液压系统的设计 [J], 邢克鹏;徐莉萍;任德志
4.甘蔗联合收割机液压系统节能初探 [J], 朱其崇;莫建霖
5.液压控制单元在甘蔗联合收割机液压系统中的应用研究 [J], 陆愈天;曾伯胜;莫建霖
因版权原因,仅展示原文概要,查看原文内容请购买。
甘蔗机械化面临问题分析与措施建议摘要:近年来,随着现代农业的不断发展,甘蔗产业机械化发展受到了重视。
甘蔗是我国制糖的主要原料。
我国是世界上最大的食糖生产国和消费国,为了满足国内国际的食糖生产需求,我国一直在加快甘蔗产业化生产进程。
关键词:甘蔗;机械化;问题分析;措施建议引言甘蔗机械化是甘蔗产业发展的重要举措,同时也是农户增收的主要途径,因此,相关人员应深度剖析甘蔗机械化发展现状,因地制宜提出发展策略,这对实现甘蔗机械化发展有着至关重要的意义。
1甘蔗机械化收获技术的重要性1.1推广甘蔗收获机械化技术与收获机械是社会发展的必然趋势首先,在社会经济和科学技术快速发展的背景下,结合当前甘蔗种植、收获的整体形势,传统的甘蔗种植方式和传统的甘蔗收获技术处于逐渐被淘汰的趋势,实现甘蔗生产机械化刻不容缓。
因此,政府及有关部门为此制订了相应的保障性政策,旨在大力支持甘蔗收获机械推广和甘蔗机械化收获技术落到实处。
其次,为了大力推动甘蔗生产机械化工作,高效落实甘蔗收获机械化技术与收获机械推广,政府及有关部门已经制订有效的措施,加强甘蔗收获机械化技术的投入,建立完善的市场运作模式,从多方面全力支持甘蔗收获机械化技术的推广[1]。
1.2填补劳动力缺口、提升蔗农整体经济收益首先,国内大部分甘蔗种植地区进行甘蔗收获的过程中往往采取人工方式,造成蔗农劳动强度大、收获效率低,必须通过先进的甘蔗收获机械化技术才能解决效率低下、成本高昂的传统收获方式问题,提升甘蔗收获效率。
其次,在甘蔗种植地区进行收获的过程中,劳动力严重缺乏,亟需先进的机械化收获技术解决劳动力不足问题。
推广甘蔗机械化收获技术与收获机械不仅能够有效填补劳动力缺口,还可以帮助蔗农较好适应甘蔗种植产业现代化发展形式。
最后,从生产成本来看,因为劳动力短缺和收获效率低,传统的人工收获甘蔗的成本逐年上涨,利润占比逐年下滑,蔗农整体经济收益连续缩水。
2甘蔗收割技术研究现状2.1扶蔗装置甘蔗收割机是我国重要的农用装备,相关学者对甘蔗收割机的研究从未停止,经过对各部件的不断创新与改进,逐步形成能满足现代生产的基本要求。
整秆式甘蔗联合收割机整机物流设计与仿真傅隆正1,蒙艳玫2,董振2,李贝2(1.南宁市科学技术局,南宁530028;2.广西大学机械工程学院,南宁530004)摘要:阐述了整秆式甘蔗联合收割机物流通道的总体设计方法,给出了物流通道的主要设计参数,结合机械系统虚拟样机,分析软件A dm as对整秆式联合收割机甘蔗输送过程进行仿真分析,并进行试验验证。
结果表明:采用腹挂中置式的物流通道结构能使甘蔗顺利进入通道,且可以充分利用收割机底盘的空间,对甘蔗收割机的小型化有较好的作用;综合考虑剥叶机构、后续甘蔗切段机构以及集蔗器的尺寸对输蔗过程进行分析,证明输蔗通道的倾角在15o左右比较合适。
关键词:整秆式甘蔗联合收割机;物流通道;仿真分析中图分类号:$225.5+3文献标识码:A文章编号:1003—188X(2012)02-0019—050引言甘蔗联合收获机主要有切断式和整秆式两种类型。
大型切断式甘蔗联合收割机具有功率大、作业效率高、功能齐全和自动化程度高等特点,是全程机械化生产中成熟与稳定的收获机具。
世界上发达的产糖国家(如古巴、巴西、澳大利亚和美国等)甘蔗种植在广阔平坦的地域,便于机械化作业,同时糖厂制糖工艺先进,因此大型切断式甘蔗联合收割机在这些地区得到了广泛应用。
如巴西已有80%的甘蔗生产实现了机械化收割,古巴也达到了72%…。
在这些产糖发达国家,大型切段式甘蔗联合收割机已成为甘蔗收获机械技术发展的主要方向。
国外广泛使用的切断式大型甘蔗收获机械在国内并不适用,主要原因如下:一是我国60%一70%的甘蔗种植在丘陵坡地,蔗地小而分散,甘蔗生产集约化程度较低,而国外按广阔平坦路面设计的大机型转弯困难,且丘陵地面起伏较大,也容易造成割茬不齐和甘蔗破头率高等“水土不服”现象;二是国外大型甘蔗收获机械售价昂贵,每台约100万一150万人民币;三是切断式收割导致蔗秆断口较多,糖厂无法及时入榨,甘蔗糖分损失较大,而且切断式收割没有将蔗叶与蔗秆彻底分离,导致含杂率较高。
甘蔗联合收割机机液速度控制系统的设计与仿真陈远玲;孙英杰;梁浩昌;李文全;魏威;龙禹平【摘要】甘蔗联合收割机在收割作业过程中,各作业机构间速度的合理匹配,对砍蔗质量、除杂效果以及蔗流堵塞等均有重要影响.基于联合收割机速度匹配的要求,提出了一种基于机械式速度跟踪器的机液速度反馈阀控系统,实现一个作业系统对另外一个作业系统的转速跟踪.运用AMESim与ADAMS软件对该系统进行联合仿真,结果表明:该系统适用于甘蔗联合收割机各子系统间转速的协调联动控制.转速跟踪误差与节流阀的流量增益有关,采用梯形槽节流阀口,速度跟踪误差小于5.24%,可适用于该系统,采用U形槽、三角形槽、L形槽形状的节流阀口,跟踪误差大,不适用于该系统.【期刊名称】《液压与气动》【年(卷),期】2018(000)008【总页数】5页(P7-11)【关键词】甘蔗联合收割机;协调联动;机械式速度跟踪器;仿真【作者】陈远玲;孙英杰;梁浩昌;李文全;魏威;龙禹平【作者单位】广西大学机械工程学院,广西南宁530004;广西大学机械工程学院,广西南宁530004;广西大学机械工程学院,广西南宁530004;广西大学机械工程学院,广西南宁530004;广西大学机械工程学院,广西南宁530004;广西大学机械工程学院,广西南宁530004【正文语种】中文【中图分类】TH137引言甘蔗联合收割机是甘蔗机械化生产链中最关键的设备,对减轻农民劳动强度、提高甘蔗收割效率、降低蔗糖成本有重要作用。
然而,我国自主设计研发的甘蔗联合收割机在收割质量等方面与国外机器相比都还有较大差距,动力传动与控制系统的设计需要进一步改进和提高[1]。
甘蔗联合收割机的收割质量评价指标主要有破头率、含杂率、损失率等。
研究表明,甘蔗联合收割机的行走速度与切割器的刀盘转速、喂入输送辊的转速之间有速比约束,各子系统之间需要协调控制。
该功能不但会影响到甘蔗收割质量的含杂率、损失率、破头率等指标,而且会影响到甘蔗物流通道的堵塞,进而影响到设备工作的可靠性[2-3]。
整秆式甘蔗收获机集蔗机构的设计与仿真麻芳兰;刘海;杨冰心;薛斌【摘要】在分析了现有的几种甘蔗收获机集蔗机构存在的一系列缺陷和不足的基础上,结合甘蔗收获机集蔗机构的功能和要求,利用三维设计软件SolidWorks设计了一种整秆式甘蔗收获机集蔗机构的模型,并利用动力学和动力学仿真分析软件ADAMS对该模型进行了动力学和运动学仿真分析.通过观察仿真过程和所得到的甘蔗卸载时质心的运动速度曲线,对该模型做出了适当的修改,得到了比较理想的结果.【期刊名称】《农机化研究》【年(卷),期】2013(035)001【总页数】4页(P94-97)【关键词】甘蔗收获机;集蔗机构;仿真分析【作者】麻芳兰;刘海;杨冰心;薛斌【作者单位】广西大学机械工程学院,南宁 530004;广西大学机械工程学院,南宁530004;广西大学机械工程学院,南宁 530004;广西大学机械工程学院,南宁530004【正文语种】中文【中图分类】S225.5+90 引言近年来,随着农业机械化的发展以及制糖产业的需要,出现了不同型式的甘蔗收获机。
在甘蔗的机械化收获生产中,用于甘蔗收集的终端收集系统又称之为集蔗机构,功能主要有两个:一是对从剥叶输送系统中出来的甘蔗进行收集;二是将收集好的甘蔗进行有效合理的卸载。
这两个功能能否顺利实现将直接影响着甘蔗收获机械化能否顺利进行。
通过参观2009年在广西金光农场和2010年在广西扶绥举行的全国甘蔗收获机现场演示会发现,现有的甘蔗收获机集蔗机构存在一些不足:如不能保证将甘蔗卸载到空地上,收集甘蔗时出现漏收;卸载时不平稳导致甘蔗堆砌凌乱;结构复杂、价格昂贵等;或者大多数甘蔗收获机干脆就没有集蔗机构,这就要耗费更多劳动力用于甘蔗的收集,也不符合农业机械化的发展要求。
因此,研制适用、有效的集蔗机构对于提高甘蔗收获效率和降低甘蔗收获的劳动强度具有较大的现实意义。
针对现有的整秆式甘蔗收获机集蔗机构的缺陷,本文先用SolidWorks三维设计软件建立一种集蔗机构模型,再使用ADAMS软件对机构模型进行卸载甘蔗的动态仿真,验证该机构功能的可行性以及卸载的平稳性,并作出适当改进。
整秆式甘蔗联合收割机整机物流设计与仿真傅隆正;蒙艳玫;董振;李贝【摘要】阐述了整秆式甘蔗联合收割机物流通道的总体设计方法,给出了物流通道的主要设计参数,结合机械系统虚拟样机,分析软件Admas对整秆式联合收割机甘蔗输送过程进行仿真分析,并进行试验验证.结果表明:采用腹挂中置式的物流通道结构能使甘蔗顺利进入通道,且可以充分利用收割机底盘的空间,对甘蔗收割机的小型化有较好的作用;综合考虑剥叶机构、后续甘蔗切段机构以及集蔗器的尺寸对输蔗过程进行分析,证明输蔗通道的倾角在15 °左右比较合适.【期刊名称】《农机化研究》【年(卷),期】2012(034)002【总页数】5页(P19-23)【关键词】整秆式甘蔗联合收割机;物流通道;仿真分析【作者】傅隆正;蒙艳玫;董振;李贝【作者单位】南宁市科学技术局,南宁530028;广西大学机械工程学院,南宁530004;广西大学机械工程学院,南宁530004;广西大学机械工程学院,南宁530004【正文语种】中文【中图分类】S225.5+30 引言甘蔗联合收获机主要有切断式和整秆式两种类型。
大型切断式甘蔗联合收割机具有功率大、作业效率高、功能齐全和自动化程度高等特点,是全程机械化生产中成熟与稳定的收获机具。
世界上发达的产糖国家(如古巴、巴西、澳大利亚和美国等)甘蔗种植在广阔平坦的地域,便于机械化作业,同时糖厂制糖工艺先进,因此大型切断式甘蔗联合收割机在这些地区得到了广泛应用。
如巴西已有80%的甘蔗生产实现了机械化收割,古巴也达到了72%[1]。
在这些产糖发达国家,大型切段式甘蔗联合收割机已成为甘蔗收获机械技术发展的主要方向。
国外广泛使用的切断式大型甘蔗收获机械在国内并不适用,主要原因如下:一是我国60%~70%的甘蔗种植在丘陵坡地,蔗地小而分散,甘蔗生产集约化程度较低,而国外按广阔平坦路面设计的大机型转弯困难,且丘陵地面起伏较大,也容易造成割茬不齐和甘蔗破头率高等“水土不服”现象;二是国外大型甘蔗收获机械售价昂贵,每台约100万~150万人民币;三是切断式收割导致蔗秆断口较多,糖厂无法及时入榨,甘蔗糖分损失较大,而且切断式收割没有将蔗叶与蔗秆彻底分离,导致含杂率较高。
第39卷第5期 2018年5月 中国农机化学报 Journal of Chinese Agricultural Mechanization Vo1.39 No.5
Mav. 2018
整杆式甘蔗收割机液压系统设计与分析* 刘恩辰,葛动元,罗信武 (广西科技大学机械工程学院,广西柳州,545006)
摘要:液压系统是整杆式甘蔗收割机的核心动力装置,为实现优化设计,分析简单单独控制系统和简单集成控制系统的特 点,并提出优化集成控制方案。简单单独控制系统使用和维护都相对简单方便,但系统集成度低,动力和传动结构多且庞 大,也增加了设备重量和成本,液压系统的管路较为复杂,系统发热严重,综合效果不太理想;简单集成控制系统系统集成 度好,但小负载器件的功率因数低,其中扶蔗机构的功率因数低至26.7 ,系统发热量大;优化集成控制系统系统集成度 好,通过设置增速器,将扶蔗机构的功率因数提升至92 以上,具有较好的综合效果。 关键词:收割机;甘蔗;液压系统;设计 中图分类号:¥225.5+3 文献标识码:A 文章编号:2095—5553(2018)05—0001—04
刘恩辰,葛动元,罗信武.整杆式甘蔗收割机液压系统设计与分析EJI.中国农机化学报,2018,39(5):01~O4 Liu Enchen,Oe Dongyuan,Luo Xinwu.Design and analysis of hydraulic system for whole stalk sugarcane harvester[J] Journal of Chinese Agricultural Mechanization,2018,39(5):01~O4
0 引言 甘蔗是中国南方主要经济作物之一,实现甘蔗收 获机械化能够有效提高劳动效率、降低收割成本,对中 国农业发展具有重要意义。根据最终收获甘蔗形态的 不同,可将甘蔗联合收割机分为两种类型:切段式收割 机和整杆式收割机。受甘蔗种植模式、种植地形和糖 厂榨糖工艺等因素影响,目前在中国整杆式甘蔗收割 机是甘蔗收获机研制的重要机型_1 ]。 1 整杆式甘蔗联合收割机动作分析 整杆式甘蔗联合收割机工作时,其动作包括扶蔗、 压倒、砍蔗、喂人、剥叶、输送、行走、吹风等,上述各个 动作分别对应螺旋扶蔗机构的转动、压倒滚筒的转动 以及收割机整体向前运动、收割刀具的转动、喂人滚筒 的转动、剥叶及分叶滚筒的转动、输送滚筒的转动、行 走机构的转动、吹风机构的转动,这些机构都是由液压 系统进行驱动的。 同时,为适应不同的甘蔗收割场景,还设置了油缸 系统来调节螺旋扶蔗机构的高度升降及角度变幅、收 割刀具的高度升降以及甘蔗收割机的转向。收割甘蔗 时,扶蔗机构、压倒机构、砍蔗机构、喂入机构、剥叶机 构、输送机构、行走机构、吹风机构等机构同时运行、相 互配合,但各机构所承受的负载大小不一;扶蔗机构以 及切割机构的升降油缸,只在工作开始前调整好相应 的高度和角度,然后对油缸进行锁紧;另外,转向油缸 只在甘蔗收割机进行转向或掉头时才工作。为防止堵 塞情况,工作开始时,先启动输送装置、剥叶装置、喂入 装置和压倒装置,再启动刀具及扶蔗装置;而工作完毕 时,应该先关闭刀具及扶蔗装置,然后再关闭压倒装 置、喂入装置、剥叶装置和输送装置。
2 甘蔗收割机液压系统设计要求分析 甘蔗收割机的各个动作都是由液压系统进行驱动 的,液压系统中液压马达的流量、转速和排量间的关系 如式(1)所示,液压马达的功率、工作压力和流量间的 关系如式(2)所示。 Q一 XV×10 (1) P一 XQ÷60 (2) 式中:Q——液压马达流量,L/rain; ——液压马达转速,r/min; V——液压马达排量,mL/min; P——液压马达功率,kw; 液压马达工作压力(压强),Mpa。 根据式(1)(2)可以计算出单纯液压传动时,各传 动马达的相关参数,其参数如表1所示。
收稿日期:2018年4月28日 修回日期:2018年5月9日 *基金项目:2017年度国家自然科学基金项目(51765007);2016年度广西高校中青年教师基础能力提升项目(KY2016YB253) 第一作者:刘恩辰,女,1982年生,河北保定人,硕士,讲师;研究方向为农机设计、上肢康复机器人。E—mail:nice2010@126.corn 中国农机化学报 表1 各机构传动马达工作参数 Tab.1 Parameters of the transmission motor of each mechanism
根据甘蔗收割机的工况及动作要求,液压系统的 设计必须能满足以下四个条件:第一,独立性方面,各 机构要能单独动作,相互之问不受影响,即各传动机构 的马达工作参数要能够满足表1所列的要求;第二,效 率方面,各转动机构能达到各自的转速要求,同时减小 液压系统的压力损失,保证工作效率;第三,稳定性,各 个机构的转速不受负载变化而明显变化,能够保持正 常的速度,以实现与其他机构运动速度的关系匹配;第 四,经济性方面,尽量加强液压系统的集成性,降低收 割机的成本,提高性价比,保证经济实用性。
3 三种液压系统方案分析与比较 目前,采用的液压系统控制方案有简单单独控制 方案和简单集成控制方案两种,两种方案各有特点,本 文同时还提出一种改进后的集成控制方案。 3.1 简单单独控制方案 在简单单独控制方案中,各个工作机构分别单独进 行控制,传动方式和液压系统控制方式如表2所示。由 于剥叶机构和行走机构的工作压力高达25Mpa,因此选 择闭式变量泵的方式,不仅能够在高压大流量的条件下 工作,避免气蚀现象,还能提升系统的能源利用效率。 表2简单单独控制方案 Tab.2 Simple single control scheme
其他的系统,如压倒机构、扶蔗机构、刀具旋转机
构、喂入机构、输送机构等分别是由一个单独的定量泵 进行供油驱动,执行元件为定量马达,中间采用电磁换 向阀来控制马达的旋转方向,其控制原理如图1所示。 这种单独控制方案,控制系统简单,各个工作系统控制 独立,相互之间基本不影响,使用和维护都相对简单方 便;由于各个系统都是单独设计,可以选择合适参数的 泵和马达,减少了因调节流量带来的节流损失。但是, 单独控制方案系统集成度低,动力和传动结构多且庞 大,需要的安装空间大,也增加了设备重量和成本,液 压系统的管路较为复杂,系统发热严重,综合效果不太 理想。
— —
l I ^/\J I『lJ X flll l1.1 r主1 r圭1 山
l ~ 二=) C I I
图1 开式足量泵控制原理图 Fig.1 Control principle diagram of open type quantitative pump
3.2简单集成控制方案 针对简单单独控制方案的缺点,将液压系统进行
一定的集成,以降低设备的重量和成本。剥叶机构和 行走机构还是选择由两个闭式变量泵直接控制,一方 面是保证高压大流量下的正常工作,另一方面,采用两 个独立的液压系统,原因在于剥叶机构和行走机构两 者在工作时间上具有一定的独立性,如果将二者的液 压系统进行集成,将带来泵流量的过度富余,造成压力 损失和系统发热。压倒机构、扶蔗机构、刀具旋转机 构、喂入机构、输送机构等其余工作系统由一个负载敏 感变量泵集中供油,并通过多路阀控制各个机构的供 油情况,简单集成控制方案如表3所示。 表3简单集成控制方案 Tab.3 Simple integrated control scheme 第5期 刘恩辰等:整杆式甘蔗收割机液压系统设计与分析 j 较简单单独控制方案而言,简单集成控制方案的 集成度有所提高,整个系统采用三个泵,其中一个是负 载敏感定量泵,有利于降低能耗,同时配套使用多路 阀,可集中多个执行马达的运动,节省了安装空间。但 是,此方案将各个执行机构进行简单集成,执行机构间 存在相互影响。一方面,各执行器同时工作时,如果流 量不够,系统的流量会优先流向小负载执行机构,使得 大负载执行器的执行速度降低,甚至停止下来;另一方 面,执行器同时工作时,如果流量足够,小负载的执行 器将会存在较大的压力损失,造成耗能升高,系统发热 量增大。例如压倒机构的功率因数 ^ 一 一 O一40 (3) pmax 上 式中: ——压倒机构的工作压强; 系统的最大压强。 扶蔗机构的功率因数 ^ ^ 仡一 一_兰_一2.7 ()1 r- 6 4 P 10 式中: ——扶蔗机构的工作压强。 可见小负载执行器件的功率因数较小,需要对简 单集成控制方案进行改进,以提高器件的功率因数,降 低能耗和系统发热。 3.3优化集成控制方案 由式(3)(4)可知,造成简单集成控制方案中器件 功率因数较小的主要原因为,器件的工作压强远小于 本液压系统中的最大工作压强。因此,为提高器件功 率因数,本文提出一种新型的甘蔗收获机液压传动方 式:在液压传动后,增加增速器传动机构。优化集成控 制方案如表4所示。 表4优化集成控制方案 Tab.4 Optimal integrated control scheme 由于设有增速器,小负载器件的工作压强得到了 提升,其功率因数因而也得到提升。负载工作压强、增 速比、马达压强三者间的关系如式5。 P—pf×,z (5) 式中:户 ——负载压强,Mpa; 增速比。 由式(3)(4)可知道,将执行器的马达压强调节至 系统最大压强时,执行器的功率因素最大,根据表1和 表4,可知,负载敏感定量泵系统的最大压强为 15Mpa。根据式(5),负载敏感定量泵系统中压倒机构 的传动比 1一P。 1—5:2 (6) 负载敏感定量泵系统中扶蔗机构的传动比 ,22一P。 2一l5:4 (7) 负载敏感定量泵系统中刀具机构的传动比 3一 。P3—5:4 (8) 负载敏感定量泵系统中风机机构的传动比 4一 。P4===15;4 (9) 由于喂入机构和输送机构的负载压力为15Mpa, 等于负载敏感定量泵系统中的最大压强,因此不需要 增设增速机构。 增压后,压倒机构、扶蔗机构、刀具机构、风机机构 等机构的马达压强与系统的最大压强相一致,因此在 执行段的功率因数主要表现为增速器的功率因数,其 值约为92 ~95 之间。优化集成系统中各机构传 动马达工作参数如表5所示。 表5优化集成系统中各机构传动马达工作参数 Tab.5 Optimization of working parameters of transmission motors in various integrated systems
名称传动比 / 功 压倒机构 扶蔗机构 刀具机构 喂人机构 输送机构 风机机构 剥叶机构 行走机构