数控机床技术考试试卷附答案
- 格式:doc
- 大小:379.00 KB
- 文档页数:13

数控机床考试题及答案一、单项选择题(每题2分,共20分)1. 数控机床的伺服系统通常由哪三部分组成?A. 驱动器、电机、编码器B. 驱动器、电机、传感器C. 控制器、电机、传感器D. 控制器、电机、编码器答案:D2. 数控机床中,用于存储加工程序的存储器类型是什么?A. ROMB. RAMC. EPROMD. EEPROM答案:B3. 以下哪个不是数控机床的坐标轴?A. X轴B. Y轴C. Z轴D. W轴答案:D4. 数控机床的刀具补偿功能主要用于补偿以下哪项误差?A. 刀具磨损B. 机床热变形C. 刀具长度D. 机床精度答案:A5. 数控机床的加工程序通常以哪种格式存储?A. 文本格式B. 图像格式C. 音频格式D. 视频格式答案:A6. 数控机床的进给率通常指的是什么?A. 刀具的旋转速度B. 刀具的移动速度C. 工件的旋转速度D. 工件的移动速度答案:B7. 数控机床的控制系统中,PLC代表什么?A. 可编程逻辑控制器B. 可编程语言控制器C. 可编程逻辑计算机D. 可编程逻辑控制计算机答案:A8. 数控机床的对刀操作通常是指什么?A. 调整刀具与工件的相对位置B. 调整刀具与机床的相对位置C. 调整工件与机床的相对位置D. 调整刀具与刀具的相对位置答案:A9. 数控机床的自动换刀系统通常由哪些部件组成?A. 刀库、换刀机械手、控制系统B. 刀库、换刀机械手、电机C. 刀库、换刀机械手、传感器D. 刀库、换刀机械手、编码器答案:A10. 数控机床的加工精度通常受到哪些因素的影响?A. 机床的刚性B. 刀具的磨损C. 机床的热变形D. 所有以上因素答案:D二、多项选择题(每题3分,共15分)1. 数控机床的维护保养包括以下哪些内容?A. 定期清洁机床B. 定期检查润滑系统C. 定期更换刀具D. 定期检查电气系统答案:ABD2. 数控机床的精度检测通常包括哪些方面?A. 定位精度B. 重复定位精度C. 刀具磨损D. 机床的热变形答案:ABD3. 数控机床的控制系统通常具备哪些功能?A. 程序存储B. 程序编辑C. 程序运行D. 故障诊断答案:ABCD4. 数控机床的刀具选择需要考虑哪些因素?A. 材料类型B. 加工表面的形状C. 刀具的耐用度D. 加工效率答案:ABCD5. 数控机床的故障诊断方法包括哪些?A. 视觉检查B. 听觉检查C. 触觉检查D. 仪器检查答案:ABCD三、判断题(每题1分,共10分)1. 数控机床的加工程序可以通过手动输入或通过计算机传输。

数控机床技术测试试卷A卷<附答案)一、填空题<每空1分,共30分)1、数控机床按伺服系统的控制方式可分为、、。
2、较常见的CNC 软件结构形式有软件结构和软件结构。
3、数控技术中常用的插补算法可归纳为插补法和插补法,前者用于数控系统,后者用于数控系统。
4、数控机床上导轨型式主要有滑动导轨、导轨和导轨。
5、数控铣削加工需要增加一个回转坐标或准确分度时,可以使用配备或使用。
6、电火花加工一次放电后,在工件和电极表面各形成一个小凹坑,其过程可分为电离、、热膨胀、和消电离等几个连续阶段。
7、影响材料放电腐蚀的主要因素是、、。
8、影响电火花加工精度的主要因素是、、。
9、电火花成形加工极性的选择主要靠经验和实验确定,当采用短脉冲时,一般应选用极性加工。
10、数控车床X 轴方向上的脉冲当量为Z 方向上的脉冲当量的。
11、数控机床的日常维护与保养主要包括、、等三个方面内容。
12、3B 格式的数控系统没有功能,确定切割路线时,必须先根据工件轮廓划出电极丝中心线轨迹,再按编程。
13、旋转变压器和感应同步器根据励磁绕组供电方式的不同,可分为工作方式和工作方式。
二、判断题<每题1分,共10分,正确打√错误打×)1、更换电池一定要在数控系统通电的情况下进行。
否则存储器中的数据就会丢失,造成数控系统的瘫痪。
<)2、数控机床几何精度的检测验收必须在机床精调后一次完成,不允许调整一项检测一项。
<)3、数控铣削螺纹加工,要求数控系统必须具有螺旋线插补功能。
<)4、电火花成形加工在粗加工时一般选择煤油加机油作为工作液。
<)5、当脉冲放电能量相同时,热导率愈小的金属,电蚀量会降低。
<)6、开环数控机床,进给速度受到很大限制,其主要原因是步进电机的转速慢。
7、当数控机床具有刀具半径补偿功能时,其程序编制与刀具半径补偿值无关。
8、只有加工中心机床能实现自动换刀,其它数控机床都不具备这一功能<) <)<)9、M08 指令功能在程序段运动结束后开始。

数控机床考试题库及答案一、单项选择题1. 数控机床的数控系统通常采用哪种计算机系统?A. 个人计算机B. 工业计算机C. 嵌入式计算机D. 通用计算机答案:C2. 数控机床的伺服系统的作用是什么?A. 控制机床的启动和停止B. 执行数控系统的指令C. 监测机床的运行状态D. 维护机床的清洁答案:B3. 数控机床的刀具库通常安装在哪个位置?A. 机床的顶部B. 机床的侧面C. 机床的底部D. 机床的内部答案:A4. 数控机床加工过程中,刀具的更换是由哪个系统完成的?A. 主轴系统B. 伺服系统C. 自动换刀系统D. 冷却系统答案:C5. 数控机床的精度通常由哪个参数来衡量?A. 机床的尺寸B. 机床的重量C. 加工的表面粗糙度D. 机床的刚度答案:C二、多项选择题1. 数控机床的主要组成部分包括哪些?A. 数控系统B. 伺服系统C. 驱动系统D. 刀具库E. 机床主体答案:A, B, C, E2. 数控机床加工过程中,哪些因素会影响加工精度?A. 刀具的磨损B. 机床的振动C. 材料的硬度D. 操作者的技术水平E. 环境温度的变化答案:A, B, E三、判断题1. 数控机床的编程语言通常采用G代码。
答案:正确2. 数控机床的加工速度比普通机床慢。
答案:错误3. 数控机床可以实现多轴联动加工。
答案:正确四、简答题1. 简述数控机床与普通机床的主要区别。
答案:数控机床与普通机床的主要区别在于数控机床采用计算机控制,能够自动完成复杂的加工任务,而普通机床则需要人工操作。
2. 描述数控机床加工过程中的自动换刀过程。
答案:数控机床加工过程中的自动换刀过程通常包括刀具识别、刀具库选择、刀具更换和刀具定位等步骤,整个过程由自动换刀系统控制完成。
五、计算题1. 假设某数控机床的加工精度为0.01mm,试计算加工一个直径为100mm的圆时,加工误差的最大值。
答案:加工误差的最大值为0.01mm。
三、单项选择题: 1、 CNC系统软件必须完成管理与控制两大任务,下而任务中哪个不属于控制任务?()
A、诊断 B、插补 C、位控 D、译码
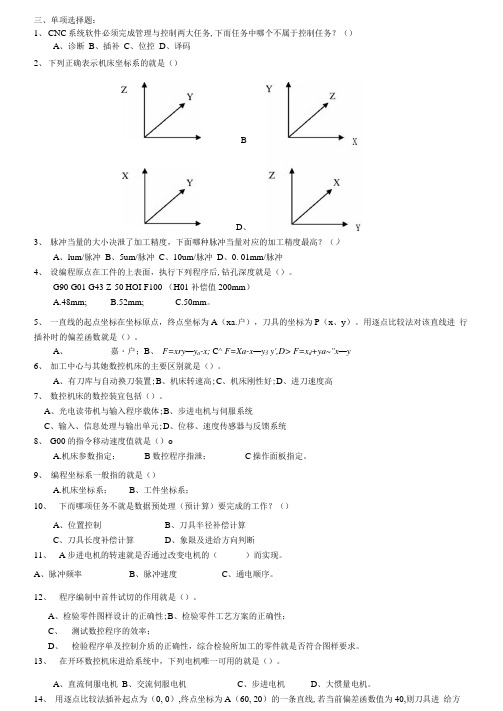
2、 下列正确表示机床坐标系的就是()
3、 脉冲当量的大小决泄了加工精度,下面哪种脉冲当量对应的加工精度最高?() A、lum/脉冲 B、5um/脉冲 C、10um/脉冲 D、0. 01mm/脉冲
4、 设编程原点在工件的上表面,执行下列程序后,钻孔深度就是()。
G90 G01 G43 Z-50 HOI F100 (H01 补偿值200mm) A.48mm; B.52mm; C.50mm。
5、 一直线的起点坐标在坐标原点,终点坐标为A(xa.户),刀具的坐标为P(x、y)。用逐点比较法对该直线进 行
插补时的偏差函数就是()。 A、 嘉・户;B、 F=xry—ya-x; C^ F=Xa-x—y3 y',D> F=xd+ya~"x—y 6、 加工中心与其她数控机床的主要区别就是()。
A、有刀库与自动换刀装置;B、机床转速高;C、机床刚性好;D、进刀速度高
7、 数控机床的数控装宜包括()。
A、光电读带机与输入程序载体;B、步进电机与伺服系统
C、输入、信息处理与输出单元;D、位移、速度传感器与反馈系统
8、 G00的指令移动速度值就是()o A.机床参数指定; B数控程序指泄; C操作面板指定。
9、 编程坐标系一般指的就是()
A.机床坐标系; B、工件坐标系;
10、 下而哪项任务不就是数据预处理(预计算)要完成的工作?()
A、位置控制 B、刀具半径补偿计算
C、刀具长度补偿计算 D、象限及进给方向判断
11、 A步进电机的转速就是否通过改变电机的( )而实现。
A、脉冲频率 B、脉冲速度 C、通电顺序。
12、 程序编制中首件试切的作用就是()。
A、检验零件图样设计的正确性;B、检验零件工艺方案的正确性;
C、 测试数控程序的效率;
D、 检验程序单及控制介质的正确性,综合检验所加工的零件就是否符合图样要求。

数控技术考试题及答案一、单项选择题(每题 2 分,共 10 题)1. 数控机床中,数控系统的主要功能不包括以下哪一项?A. 程序存储B. 插补运算C. 刀具更换D. 伺服控制2. 数控机床的伺服系统不包括以下哪一部分?A. 驱动电机B. 编码器C. 伺服控制器D. 冷却系统3. 数控编程中,G代码用于表示:A. 准备功能B. 主轴功能C. 辅助功能D. 刀具功能4. 在数控加工中,刀具半径补偿的作用是什么?A. 改变刀具速度B. 改变刀具路径C. 改变刀具材料D. 改变刀具形状5. 数控机床的坐标系中,Z轴通常表示:A. 横向移动B. 纵向移动C. 垂直移动D. 旋转移动6. 数控机床的刀具库中,刀具的编号通常采用:A. 随机编号B. 顺序编号C. 功能编号D. 颜色编号7. 数控机床的加工精度主要取决于:A. 机床结构B. 刀具材料C. 操作人员D. 电源电压8. 数控机床的控制系统中,PLC的作用是:A. 程序存储B. 插补运算C. 逻辑控制D. 伺服控制9. 数控机床的加工过程中,刀具路径的生成是通过:A. 手动编程B. 自动编程C. 人工操作D. 随机生成10. 数控机床的维护中,以下哪项不是定期检查的内容?A. 润滑系统B. 电气系统C. 冷却系统D. 操作人员的健康状况二、多项选择题(每题 2 分,共 10 题)1. 数控机床的主要组成部分包括以下哪些?A. 床身B. 工作台C. 控制系统D. 刀具库E. 冷却系统2. 数控编程中常用的编程语言包括:A. G代码B. M代码C. 梯形图D. 流程图E. 伪代码3. 数控机床的伺服系统的作用包括:A. 驱动机床移动B. 控制机床速度C. 保持机床精度D. 监测机床状态E. 调节机床温度4. 数控机床的刀具补偿包括:A. 长度补偿B. 半径补偿C. 角度补偿D. 位置补偿E. 形状补偿5. 数控机床的坐标系中,以下哪些轴是常见的?A. X轴B. Y轴C. Z轴D. U轴E. V轴6. 数控机床的控制系统的功能包括:A. 程序存储B. 插补运算C. 伺服控制D. 刀具更换E. 故障诊断7. 数控机床的维护中,以下哪些是重要的检查项目?A. 润滑系统B. 电气系统C. 冷却系统D. 刀具库E. 操作面板8. 数控机床的加工精度影响因素包括:A. 机床结构B. 刀具材料C. 操作人员D. 电源电压E. 环境温度9. 数控机床的控制系统中,PLC可以实现的功能包括:A. 程序存储B. 逻辑控制C. 故障诊断D. 伺服控制E. 刀具更换10. 数控机床的加工过程中,以下哪些是刀具路径生成的方法?A. 手动编程B. 自动编程C. 人工操作D. 随机生成E. 专家系统三、判断题(每题 2 分,共 10 题)1. 数控机床的数控系统可以存储加工程序。

数控车床考试试题和答案一、单项选择题(每题2分,共20分)1. 数控车床的数控系统是采用()。
A. 步进电机B. 伺服电机C. 直流电机D. 交流电机答案:B2. 数控车床的主轴箱内装有()。
A. 齿轮B. 丝杠C. 导轨D. 轴承答案:A3. 数控车床的刀架上可以安装()。
A. 车刀B. 铣刀C. 钻头D. 镗刀答案:A4. 数控车床的控制系统通常采用()。
A. 开环控制B. 闭环控制C. 半闭环控制D. 混合控制答案:B5. 数控车床的刀具补偿功能主要用于()。
A. 刀具长度补偿B. 刀具半径补偿C. 刀具磨损补偿D. 刀具位置补偿答案:B6. 数控车床的编程语言中,G代码用于()。
A. 程序开始B. 程序结束C. 刀具移动D. 主轴转速答案:C7. 数控车床的自动换刀装置通常采用()。
A. 机械手B. 转塔刀架C. 电动刀架D. 手动换刀答案:B8. 数控车床的主轴转速范围通常由()决定。
A. 电机B. 变频器C. 齿轮箱D. 导轨答案:B9. 数控车床的刀具夹紧方式通常为()。
A. 手动夹紧B. 气动夹紧C. 液压夹紧D. 电动夹紧答案:B10. 数控车床的加工精度通常由()决定。
A. 刀具B. 机床C. 材料D. 操作者答案:B二、多项选择题(每题3分,共15分)11. 数控车床的主要组成部分包括()。
A. 床身B. 工作台C. 主轴箱D. 刀架答案:ACD12. 数控车床的刀具材料可以是()。
A. 高速钢B. 硬质合金C. 陶瓷D. 金刚石答案:ABCD13. 数控车床的加工对象包括()。
A. 轴类零件B. 盘类零件C. 齿轮D. 箱体答案:ABC14. 数控车床的控制系统功能包括()。
A. 程序存储B. 刀具补偿C. 自动换刀D. 故障诊断答案:ABCD15. 数控车床的加工特点包括()。
A. 高精度B. 高效率C. 复杂性D. 灵活性答案:ABCD三、判断题(每题2分,共20分)16. 数控车床的主轴箱内装有丝杠。
数控机床的技术考试试卷(附答案)数控机床技术考试试卷A卷(附答案)⼀、填空题(每空1分,共30分)1、数控机床按伺服系统的控制⽅式可分为、、。
2、较常见的CNC软件结构形式有软件结构和软件结构。
3、数控技术中常⽤的插补算法可归纳为插补法和插补法,前者⽤于数控系统,后者⽤于数控系统。
4、数控机床上导轨型式主要有滑动导轨、导轨和导轨。
5、数控铣削加⼯需要增加⼀个回转坐标或准确分度时,可以使⽤配备或使⽤。
6、电⽕花加⼯⼀次放电后,在⼯件和电极表⾯各形成⼀个⼩凹坑,其过程可分为电离、、热膨胀、和消电离等⼏个连续阶段。
7、影响材料放电腐蚀的主要因素是、、。
8、影响电⽕花加⼯精度的主要因素是、、。
9、电⽕花成形加⼯极性的选择主要靠经验和实验确定,当采⽤短脉冲时,⼀般应选⽤极性加⼯。
10、数控车床X轴⽅向上的脉冲当量为Z⽅向上的脉冲当量的。
11、数控机床的⽇常维护与保养主要包括、、等三个⽅⾯容。
12、3B格式的数控系统没有功能,确定切割路线时,必须先根据⼯件轮廓划出电极丝中⼼线轨迹,再按编程。
13、旋转变压器和感应同步器根据励磁绕组供电⽅式的不同,可分为⼯作⽅式和⼯作⽅式。
⼆、判断题(每题1分,共10分,正确打√错误打×)1、更换电池⼀定要在数控系统通电的情况下进⾏。
否则存储器中的数据就会丢失,造成数控系统的瘫痪。
()2、数控机床⼏何精度的检测验收必须在机床精调后⼀次完成,不允许调整⼀项检测⼀项。
()3、数控铣削螺纹加⼯,要求数控系统必须具有螺旋线插补功能。
()4、电⽕花成形加⼯在粗加⼯时⼀般选择煤油加机油作为⼯作液。
()5、当脉冲放电能量相同时,热导率愈⼩的⾦属,电蚀量会降低。
()6、开环数控机床,进给速度受到很⼤限制,其主要原因是步进电机的转速慢。
()7、当数控机床具有⼑具半径补偿功能时,其程序编制与⼑具半径补偿值⽆关。
()8、只有加⼯中⼼机床能实现⾃动换⼑,其它数控机床都不具备这⼀功能。
()9、M08指令功能在程序段运动结束后开始。
数控机床技术测试试卷A卷 <附答案)一、填空题 <每空1分,共30分)1、数控机床按伺服系统的控制方式可分为、、。
2、较常见的CNC 软件结构形式有软件结构和软件结构。
3、数控技术中常用的插补算法可归纳为插补法和插补法,前者用于数控系统,后者用于数控系统。
4、数控机床上导轨型式主要有滑动导轨、导轨和导轨。
5、数控铣削加工需要增加一个回转坐标或准确分度时,可以使用配备或使用。
6、电火花加工一次放电后,在工件和电极表面各形成一个小凹坑,其过程可分为电离、、热膨胀、和消电离等几个连续阶段。
7、影响材料放电腐蚀的主要因素是、、。
8、影响电火花加工精度的主要因素是、、。
9、电火花成形加工极性的选择主要靠经验和实验确定,当采用短脉冲时,一般应选用极性加工。
10、数控车床X 轴方向上的脉冲当量为Z 方向上的脉冲当量的。
11、数控机床的日常维护与保养主要包括、、等三个方面内容。
12、 3B 格式的数控系统没有功能,确定切割路线时,必须先根据工件轮廓划出电极丝中心线轨迹,再按编程。
13、旋转变压器和感应同步器根据励磁绕组供电方式的不同,可分为工作方式和工作方式。
二、判断题 <每题1分,共10分,正确打√错误打×)1、更换电池一定要在数控系统通电的情况下进行。
否则存储器中的数据就会丢失,造成数控系统的瘫痪。
<)2、数控机床几何精度的检测验收必须在机床精调后一次完成,不允许调整一项检测一项。
<)3、数控铣削螺纹加工,要求数控系统必须具有螺旋线插补功能。
<)4、电火花成形加工在粗加工时一般选择煤油加机油作为工作液。
<)5、当脉冲放电能量相同时,热导率愈小的金属,电蚀量会降低。
<)6、开环数控机床,进给速度受到很大限制,其主要原因是步进电机的转速慢。
<)7、当数控机床具有刀具半径补偿功能时,其程序编制与刀具半径补偿值无关。
<)8、只有加工中心机床能实现自动换刀,其它数控机床都不具备这一功能。
三、单项选择题:C 系统软件必须完成管理和控制两大任务,下面任务中哪个不属于控制任务A 、诊断B 、插补C 、位控D 、译码 2.下列正确表示机床坐标系的是A 、X B 、XC 、ZD 、Y3.脉冲当量的大小决定了加工精度,下面哪种脉冲当量对应的加工精度最高A 、1um/脉冲B 、5um/脉冲C 、10um/脉冲D 、0.01mm/脉冲 4.设编程原点在工件的上表面,执行下列程序后,钻孔深度是 ; G90 G01 G43 Z-50 H01 F100 H01补偿值-2.00mmA .48mm ; B.52mm ; C.50mm;5.一直线的起点坐标在坐标原点,终点坐标为A x a 、y a ,刀具的坐标为P x 、y ;用逐点比较法对该直线进行插补时的偏差函数是 ;A. F =x ·y -x a ·y a ;B. F =x a ·y -y a ·x ;C. F =x a ·x -y a ·y ;D. F =x a +y a -x -y 6. 加工中心与其他数控机床的主要区别是 ;A .有刀库和自动换刀装置;B .机床转速高;C .机床刚性好;D .进刀速度高 7. 数控机床的数控装置包括 ;A.光电读带机和输入程序载体;B.步进电机和伺服系统C.输入、信息处理和输出单元;D.位移、速度传感器和反馈系统 8. G00的指令移动速度值是 ;A .机床参数指定;B 数控程序指定;C 操作面板指定; 9.编程坐标系一般指的是A .机床坐标系; B. 工件坐标系;10.下面哪项任务不是数据预处理预计算要完成的工作A 、位置控制B 、刀具半径补偿计算C 、刀具长度补偿计算D 、象限及进给方向判断 11. A 步进电机的转速是否通过改变电机的 而实现; A. 脉冲频率 B. 脉冲速度 C. 通电顺序; 12. 程序编制中首件试切的作用是 ;A.检验零件图样设计的正确性;B.检验零件工艺方案的正确性;C.测试数控程序的效率;D.检验程序单及控制介质的正确性,综合检验所加工的零件是否符合图样要求;ZXXY YZZY13. 在开环数控机床进给系统中,下列电机唯一可用的是 ;A .直流伺服电机B .交流伺服电机C .步进电机D .大惯量电机;14. 用逐点比较法插补起点为0,0,终点坐标为A60,20的一条直线,若当前偏差函数值为40,则刀具进给方向为 ;A . +X ;B . –X ;C . +Y ; D.-Y; 15.数控机床上直流电动机最常用的调速方法是A . 调压调速法;B . 调励磁磁场调速法;C . 电枢电路串电阻法;D . 电枢电路串电感法16. 用光电盘测量角位移时,为判别角位移方向,采用两套光电转换装置,使它们产生的电信号在相位上相差 ;A . 1/4周期;B . 1/2周期;C . 一周期;D . 3/4周期; 17.下面哪项任务不是数据预处理预计算要完成的工作A 、位置控制B 、刀具半径补偿计算C 、刀具长度补偿计算D 、象限及进给方向判断18. CNC 系统的中断管理主要靠 完成,而系统的中断结构决定了系统软件的结构;A 、软件B 、硬件C 、CPUD 、总线 19.步进电机的转速与下面哪些因素无关A 、脉冲信号的频率fB 、转子齿数zC 、通电方式kD 、定子绕组中的电流大小 四、简答题:1.开环进给系统中,如何补偿机械传动间隙和滚珠丝杆螺距误差 2.数控机床对进给伺服系统的要求有哪些3.开环、闭环和半闭环进给系统的区别是什么 各有什么特点4.步进电机的主要性能指标有哪些 试比较驱动步进电机的三种功率放大器特点;5.编程轨迹几何要素的连接关系如图所示,刀补方向为左刀补,试确定A 、B 、C 、D 各处的转接类型,并说明判别依据是什么6.数控机床一般由哪几个部分组成 各部分起什么作用 五、计算题:1.欲用逐点比较法插补直线O A ,其起点坐标为O0,0,终点坐标为A e x ,e y ,其值为e x =5,e y =6,试写出其直线插补运算过程,并绘出其插补轨迹;AD2.用数字积分DDA 插补法对图示直线进行插补运算,并在图中画出插补轨迹;3.某CNC 机床采用丝杆螺母副驱动工作台的直线进给运动,丝杆与电机直接相连,丝杆导程为10mm,步进电机每转400步,工作台的最高进给速度为2.4m/min,求:1) 系统的脉冲当量δ;2) 最高速进给时的进给脉冲频率;六、插补题: 1.试推导出逐点比较法插补第二象限逆圆时的偏差函数递推公式,并画出插补程序流程图;七、编程题:1.编写车削加工程序,加工ABCDEFG 部位的外轮廓,直径设定;加工尺寸如图,其它参数合理自定;各程序段要求注释;2.用有关的循环加工指令或简单指令编程加工如图所示零件的孔系,程序原点选与床原点重合,所有孔均为10=Φ的钻机削加工;1 x2 3 y A (4,3)43 2 1 O20 20 20 20302060YXO10 10 20A3.用刀具半径补偿的方法编写外轮廓铣削加工程序,工件形状如图所示,工件厚度5mm;刀具路线等其它参数、坐标系合理自定;要求考虑刀具半径补偿;各程序段要求注释;参考答案三、单项选择题:1.A2.A3.A4.C5.B6.A7.C8.A9.B 10.A 11.A 12.D 13.C 14.C 15.A16.A 17.A 18.B 19.D四、简答题:1.机械传动间隙和滚珠丝杆螺距误差可采用机械、硬件、软件补偿方法;其中机械补偿方法:传动间隙的补偿有偏心轴套调整、轴向垫片调整、双片薄齿轮调整等滚珠丝杆螺距误差常采用双螺母调整软件或硬件补偿法:预先测得传动间隙,每次在进给反向时通过软件或硬件电路额外发出对应于间隙值的指令位移,以进行补偿;2.一般来说,对数控机床伺服驱动系统的主要性能要求有以下几点:①进给速度范围要大,能满足低速切削和高速切削的需要;②位移精度要高;③跟随误差要小,即响应速度要快;④工作稳定性要好,具有抗干扰能力,运行平稳,加工精度较高;3.开环系统中没有位置检测和反馈;半闭环系统中的位置检测和反馈信号不是取自最终的进给部件,而是取的电动机轴或丝杆等中间环节,闭环系统中的位置检测和反馈信号是取自最终的进给部件如工作台;所以闭环系统的精度最高,但稳定性稍差;开环系统的精度最低,但成本也最低4.主要性能指标:步距角、静态步距误差、输出扭矩、最高启动、停止脉冲频率、边续运行的最高工作频率、步进运行和低频振荡等;其驱动电路有三种功率放大器:单电压功率放大电路、双电压功率放大电路和斩波恒流功放电路,区别如下:单电压功率放大电路:功耗大,一般只用于小功率步进电机驱动;双电压功率放大电路:采用高、低电压两种供电电源以降低能耗,高频工作时有较大的转动力,多用于中、大功率步进电机驱动;斩波恒流功放电路:利用斩波方法使电流恒定在额定值附近,不需外接电阻来限流和减少时间常数;能耗小,电源效率高;能提高高频工作频率,是目前使用最普及的一种驱动电路;5.A、B、D均为缩短型,因为夹角都为0~180度;C为伸长型,因为夹角为180~270度;6.数控机床一般包括五部分,各部分的作用如下:1控制介质:存储程序、参数;2数控装置:将加工程序译码轨迹计算速度计算、插补计算、补偿计算,向各坐标的伺服驱动系统分配速度、位移命令 ;这一部分是数控机床的核心3伺服系统:接受数控装置来的指令,将信号进行调解、转换、放大后驱动伺服电机,带动机床执行部件运动;4测量装置:电流、速度、位置等检测反馈装置;5机床本体:包括主运动部件、进给运动部件、执行部件和基础部件,最终实现刀具和工件的相对运动;五、计算题:1.由于待插补直线的起点坐标为O0,0,终点坐标为A5,6,采用总步数终点判别方法,总步数N =5+6=11;从坐标原点开始插补,故此时偏差00=F ,加工过程的运算节拍如下表所示: 序号 工作节拍第1拍:偏差判别 第2拍:坐标进给 第3拍:新偏差计算 第4拍:终点判别1 00=F +X 66001-=-=-=e y F F 10111=-=N2 01<F +Y 15612-=+-=+=e x F F 9110=-=N3 02<F +Y 45123=+-=+=e x F F 819=-=N4 03>F +X 26434-=-=-=e y F F 718=-=N5 04<F +Y 35245=+-=+=e x F F 617=-=N6 05>F +X 36356-=-=-=e y F F 516=-=N7 06<F +Y 25367=+-=+=e x F F 415=-=N8 07>F +X 46278-=-=-=e y F F 314=-=N9 08<F +Y 15489=+-=+=e x F F 213=-=N 10 09>F +X 561910-=-=-=e y F F 112=-=N 11 010<F+Y0551011=+-=+=e y F F011=-=N插补轨迹如下图所示:2.总步数为4+3=7步 J VX Xe J RX X 溢出 J VY Ye J RY Y 溢出 终点计数器 100 000 011 000 000 100 100 011 011 001 1000001011110010100 100 011 001 1 011 100 000 1 011 100 100 100 100 011 111 101 100 000 1 011 010 1 110 100 100 011 101 111 100 00010110001000插补轨迹图:3.步进电机每转400步,即步距角为:9.0400360==α(1) 系统的脉冲当量为:)(025.01013609.0360mm t i =••=••=αδ (2) 设工作台最高进给速度V 时步进电机的转速为n 转每分钟,对应的进给脉冲频率为f. 则:ti n V ••=60360nf =•α 由以上两式得:)(160010104.29.0663HZ t i V f =⨯•=••=α 六、插补题:如图,第二象限逆圆弧,起点为Ax 0,y 0,终点为Bx e ,y e ,圆心再原点,半径为R,进给方向为-x 或-y 方向;取偏差函数 222R y x F -+= 瞬时加工点Px i ,y j 对应的偏差函数值为 222,R y x F j i j i -+=ABXYO1当F i,j >0时,222R y x j i >+,点Px i ,y j 在圆弧以外,应向-y 方向进给一步;则新的加工点为x i ,y j+1,其中:11-=+j j y y新偏差为12)1(22222222121,+--+=--+=-+=++j j i j i j i j i y R y x R y x R y x F即偏差函数递推公式为 12,1,+-=+j j i j i y F F 2当F i,j <0时,222R y x j i <+,点Px i ,y j 在圆弧以内,应向-x 方向进给一步;则新的加工点为x i+1,y j ,其中:11-=+i i x x新偏差为 12)1(22222221,1+--+=+-=+=++i j i j i j i j i x R y x y x y x F即偏差函数递推公式为 12,1,+-=+i j i j i x F F3当F i,j =0时如起点,j y 2F i,j >0时; 插补程序流程图:七、编程题:1.N01 G92 X120 Z90 N02 S300 M03N03 G90 G00 X30 Z-2 _AN04 G01 Z-15 F20 _BN05 G03 X60 Z-41 R30 -CN06 G01 Z-56 -DN07 X80 Z-86 -EN08 Z-101 -FN09 G02 X114 Z-131 R35 -GN10 G00 X120 Z90 M022.N01 G92 X0 Y0 Z0N02 S300 M03 M07N03 G99 G81 X30 Y-60 Z-43 R-27 F20 -1孔N04 G98 Y-80 2孔N05 G99 G81 X50 Y-60 Z-43 R-27 F20 3孔N06 G98 Y-60 4孔N07 G99 G81 X70 Y-60 Z-43 R-27 F20 5孔N08 G98 Y-80 6孔N09 G99 G81 X90 Y-60 Z-43 R-27 F20 7孔N10 G98 Y-60 8孔N11 G99 G81 X110 Y-60 Z-43 R-27 F20 9孔N12 G98 Y-80 10孔N13 G00 X0 Y0 Z0 M05 M09N14 M023.设工件坐标系原点位于工件上表面的R50圆心处;选择刀具半径小于或等于8mmN01 G92 X-150 Y-200 Z200N02 G00 Z-5 S300 M03N03 G01 G41 X-50 Y-100 D01 F150N04 Y0N05 G02 X50 R50N06 G01 Y-100N07 G01 X30N08 G01 Y-83N09 G03 X22 Y-75 R8N10 G01 X-22N11 G03 X-30 Y-83 R8N12 G01 Y-100N13 G01 X-50N14 G00 G40 X-150 Y-200 M05N15 G00 Z200 M02简答题每题6分,共18分1.何谓二轴半坐标数控机床2.试论述数控机床的进给伺服系统是由哪几部分组成,它们分别的作用如何伺服系统常用的驱动元件是什么3.简述数控车床采用钢板焊接床身的原因;一.计算题10分若加工第一象限直线OE,起点为O0,0,终点为E7,4,设累加器为3位,试按DDA法进行插补计算,并绘出插补轨迹图;四.论述题每题9分,共36分1.试推导下图内的脉冲当量δ与步距角α的关系式,假设已知各齿轮齿数和丝杠的导程;由于脉冲当量是规定的,步进电机一经选定后,其步距角也是一定的,试回答如何满足脉冲当量与步距角中间的关系2.试分别论述开环控制系统、半闭环控制系统和闭环控制系统的实现方式和特点;3.谈谈你对现代数控机床发展趋势的看法和学习体会;二.简答题每题6分,共18分1.二轴半坐标数控机床在结构上有三个坐标,可同时控制两个坐标,而第三个坐标作等间距运动;主要用于三轴以上控制的机床,其中两个轴互为联动,而另一个轴作周期进给,如在数控铣床上用球头铣刀采用行切法加工三维空间曲面;2.由伺服驱动电路、伺服驱动装置、机械传动机构及执行部件四部分组成;它的作用是:接收数控系统发出的进给速度和位移指令信号,由伺服驱动电路作转换和放大后,经伺服驱动装置直流、交流伺服电机,功率步进电机,电液脉冲马达等和机械传动机构,驱动机床的工作台、主轴头架等执行部件实现工作进给和快速运动;伺服系统常用的驱动元件是步进电机、直流伺服电机和交流伺服电机;3.采用钢板焊接床身结构可采用最有利于提高刚度的筋板布置形式,能充分发挥壁板和筋板的承裁及抵抗变形的作用;焊接结构还无需铸造结构所需的出砂口,有可能将基础件做成完全封闭的箱形结构;钢板的弹性模量E比铸铁的弹性模量E大几乎相差一倍;因此,在结构相同时,E值大的材料刚度则高;三.计算题10分1.解:将X e=7及Y e=4化成二进制数X e=111B及Y e=100B存放在Jvx及Jvy 中,选寄存器容量为三位,则累加次数m=23=8;插补运算过程如下表所示,插补轨迹见图3-24所示;计算正确6分,绘图4分四.论述题每题9分,共36分1.解脉冲当量δ与步距角α的关系式为: 6分可通过配算齿轮降速比来满足它们中间的关系 3分2.按摩尔条纹特点,可在摩尔条纹移动方向上开设四个窗口P 1、P 2、P 4和P 4,切使得它们两两相距1/4摩尔条纹宽度,可以从四个观察窗口得到如下结论:1) 机床移动部件的位移检测:标尺光栅装在机床移动部件工作台上,赶上读数头装在床身上,当标尺光栅移动一个栅距时,摩尔条纹也移动一个摩尔条纹宽度;即透过任一窗口的光强度变化一个周期;所以可观察窗口透过的光强变化的周期数来确定标尺光栅移动了几个栅距,从而测得机床工作台的位移;3分2) 确定移动部件的方向:从P 1、P 2、P 4和P 4四个窗口可得到在相位上依次超前或滞后1/4周期的近似余弦函数的光强度变化过程;当标尺光栅沿一个方向移动时,可得到四个光强信号,P 1滞后P 2π/2,P 2滞后P 3π/2, P 3滞后P 4π/2,则摩尔条纹反向移动时四个光强变化为P 1超前P 2π/2,P 2超前P 3π/2, P 3超前P 4π/2,我们就可断定标尺光标沿反向移动;即按四个观察窗口得到光强度变化的相互超前或滞后关系来确定机床移动部件的移动方向;3分3) 确定移动的速度:根据摩尔条纹的特点,标尺光栅的移动位移与摩尔条纹位移成正比,因此标尺光栅的移动速度与摩尔条纹的移动速度一致,也与观察窗口的光强度变化频率向对应;根据透过观察窗口的光强度变化的频率来确定标尺光栅的移动速度,即得到机床移动部件的移动速度;3分3.开环控制方式通常是以步进电机或电液伺服马达为驱动元件,输入的数据经过数控系统的运算分配指令脉冲,每一个脉冲送给环形分配器驱动步进电机或电液伺服马达,使其转动一个角度带动传动机构,从而使被控制对象移动;这种方式对实际传动机构的动作完成与否不进行检查,驱动控制指令发出后不反馈会数控系统,这种控制方式容易掌握,调试方便,维修简单,但精度不高;3分在数控设备的运动部件上装有测量元件,将运动部件的位置、速度信息及时反馈给伺服系统,伺服系统将指令位置,速度信息与实际信息进行比较并及时发出补偿控制指令,如果测量元件装在机械传动链末端部件上,如机床工作台上,则该系统为全闭环系统,或闭环系统,这种控制方式精度高,速度快,但维修和调试较困难;3分如果测量元件装在机械传动链的中间部件上,如滚珠丝杠上,则该系统为半闭环系统,这种控制方式的精度比闭环的低;3分4.δα=⨯⨯⨯04321360s z z z z运行高速化;1分加工高精化;1分功能复合化;1分控制智能化;1分体系开放化;1分驱动并联化;1分交互网络化自己谈学习体会3分。