PCB缺陷检测中图像分割算法的分析与比较
- 格式:pdf
- 大小:177.36 KB
- 文档页数:8
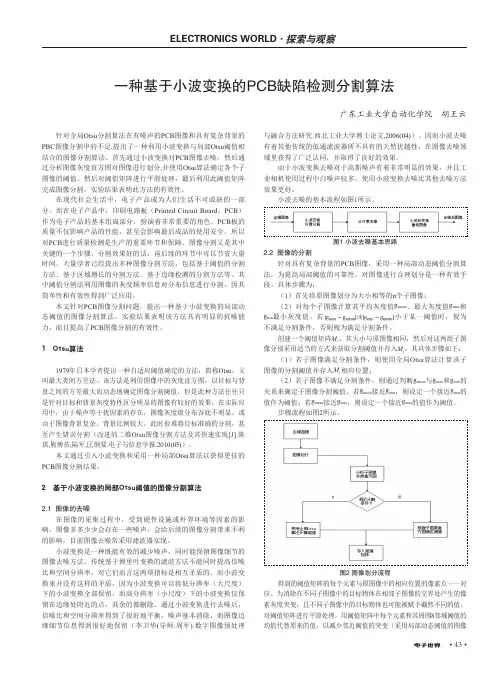
• 43•一种基于小波变换的PCB缺陷检测分割算法广东工业大学自动化学院 胡王云针对全局Otsu分割算法在有噪声的PCB图像和具有复杂背景的PBC图像分割中的不足,提出了一种利用小波变换与局部Otsu阈值相结合的图像分割算法。
首先通过小波变换对PCB图像去噪,然后通过分析图像灰度直方图对图像进行划分,并使用Otsu算法确定各个子图像的阈值。
然后对阈值矩阵进行平滑处理,最后利用此阈值矩阵完成图像分割。
实验结果表明此方法的有效性。
在现代社会生活中,电子产品成为人们生活不可或缺的一部分。
而在电子产品中,印刷电路板(Printed Circuit Board,PCB)作为电子产品的基本组成部分,扮演着非常重要的角色。
PCB板的质量不仅影响产品的性能,甚至会影响最后成品的使用安全。
所以对PCB进行质量检测是生产的重要环节和保障。
图像分割又是其中关键的一个步骤,分割效果好的话,再后续的环节中可以节省大量时间。
大量学者已经提出多种图像分割方法,包括基于阈值的分割方法、基于区域增长的分割方法、基于边缘检测的分割方法等。
其中阈值分割法利用图像的灰度频率信息对分布信息进行分割,因其简单性和有效性得到广泛应用。
本文针对PCB图像分割问题,提出一种基于小波变换的局部动态阈值的图像分割算法。
实验结果表明该方法具有明显的抗噪能力,而且提高了PCB图像分割的有效性。
1 Otsu算法1979年日本学者提出一种自适应阈值确定的方法,简称Otsu,又叫最大类间方差法。
该方法是利用图像中的灰度直方图,以目标与背景之间的方差最大而动态地确定图像分割阈值。
但是此种方法往往只是针对目标和背景灰度特性区分明显的图像有较好的效果,在实际应用中,由于噪声等干扰因素的存在,图像灰度级分布谷底不明显,或由于图像背景复杂、背景比例较大,此时很难将目标准确的分割,甚至产生错误分割(改进的二维Otsu图像分割方法及其快速实现[J].陈琪,熊博莅,陆军,匡纲要.电子与信息学报.2010(05))。
图像分割以及识别技术在帘子布疵点检测中的应用图像分割技术是图像处理中非常重要的一步,尤其对于一个在线监测系统来说,分割的效果对图像分割的效果直接影响后续疵点缺陷的特征提取及疵点类型的识别。
现有的分割算法非常多,但是基本上是一种产品对应着一种分割算法。
1.引言文章分析、比较了在图像分割以及图像分类识别的几种最为典型、常见的几种传统方法的特点,并在每个部分都选取最优的算法,组合在一起构成了适用于帘子布疵点检测的图像预处理体系。
在图像分割部分,我们使用了经典的Otsu法,此方法我们发现仿真结果使疵点有些失真;我们使用了基于统计学理论的阈值曲面概念,在此方法中,为了规避传统阈值曲面方法的缺陷,对于阈值曲面的建立采取了不一样的方法;同时,我们还使用了PCNN算法对疵点图像进行了分割。
分割之后,我们采用了一种基于距离的疵点缺陷聚类方法,以便对疵点信息有一个更好的了解。
在图像识别部分,采用了经典的 BP 神经网络对疵点类型进行分类,同时与改进的 SVM 分类方法进行比较。
实验表明,最终我们选择的算法能达到比较好的识别效果,并且实时性比较强。
随着生产技术的进步,人们更加关注产品质量,尤其对以产品外观质量作为附加价值的产品,比如一些印刷以及包装或者工艺品等;其次是那些表面缺陷会直接影响产品使用的,这样就会带来比较大的损失。
这样一来,产品质量的检测越来越受到科研及生产的关注。
而传统的产品检测都由人工进行,人对于产品的检测则存在很多的不确定性。
首先,人不能全面的检测产品,尤其是在实时的生产线上;其次,受到心情等主观因素的影响,人对于产品的检测准确性也会出现不稳定性。
而随着计算机技术的发展,人们开始考虑把计算机的快速性、可靠性、结果的可重复性与人类视觉的高度智能化以及抽象力结合起来。
从此,人们对于基于机器视觉的产品缺陷检测系统的研究也就变得越来越关注。
2.机器视觉以及图像分割技术机器视觉指的是基于视觉技术的机器系统或者学科,故此,机器人、图像系统、基于视觉的工业测控设备等等统属于机器视觉范畴。
缺陷检测图像处理与识别方法的研究摘要随着现代工业生产的不断发展,提高产品的质量和可靠性成为了企业关注的重要问题。
缺陷检测作为质量控制的重要环节,通常依赖于图像处理与识别技术。
本文旨在研究缺陷检测图像处理与识别的方法,包括基于特征提取的方法、深度学习方法、传统机器学习方法等。
通过对现有方法的总结与分析,为工业生产中的缺陷检测提供参考和指导。
1. 引言现代工业生产中,产品的质量和可靠性一直是企业关注的重点。
而缺陷的存在会降低产品性能,甚至引发安全隐患,因此缺陷检测成为了提高产品质量的关键环节。
图像处理与识别技术作为缺陷检测的重要手段,可以自动地对产品图像进行分析和识别,有效地提高缺陷检测的准确性和效率。
2. 基于特征提取的方法基于特征提取的方法是传统的缺陷检测图像处理与识别方法之一。
该方法通过对图像中的缺陷和非缺陷区域进行特征提取,然后利用分类器进行识别。
常用的特征包括颜色特征、纹理特征、形状特征等。
例如,颜色特征可以通过对图像进行颜色空间转换,提取颜色直方图或者颜色矩来表示。
纹理特征可以通过局部二值模式(Local Binary Patterns)等方法进行提取。
形状特征可以通过边缘检测算法或者连通区域分析算法来提取。
3. 深度学习方法近年来,深度学习方法在图像处理与识别领域取得了巨大的成功。
深度学习方法利用神经网络模型对图像进行端到端的学习,无需手工设计特征,可以自动地从数据中学习到高级的特征表示。
在缺陷检测图像处理与识别中,深度学习方法已经有了很多应用。
常用的深度学习模型包括卷积神经网络(Convolutional Neural Networks,CNN)和生成对抗网络(Generative Adversarial Networks,GAN)。
这些模型通过对大量正常和缺陷图像进行训练,可以自动地学习到缺陷的特征表示,从而实现准确的缺陷检测。
4. 传统机器学习方法除了基于特征提取的方法和深度学习方法,传统机器学习方法在缺陷检测图像处理与识别中也有广泛的应用。
图像法检测印刷电路板缺陷随着科技的飞速发展,印刷电路板(PCB)在电子设备中的地位越来越重要。
然而,由于制造过程中的各种因素,印刷电路板常常会出现各种缺陷,如线条缺失、短路、断路等。
这些缺陷会严重影响电子设备的性能和可靠性,因此高效准确地检测印刷电路板的缺陷显得尤为重要。
本文将介绍一种基于图像处理的缺陷检测方法,并对其灵敏度和精度进行分析。
图像法检测印刷电路板缺陷的基本原理是通过对印刷电路板进行图像采集,将采集到的图像转换为数字信号,再利用数字信号处理技术对图像进行处理和分析,从而发现和定位缺陷。
实现方法主要包括以下步骤:获取图像:通过高分辨率相机或扫描仪获取印刷电路板的图像。
预处理:对图像进行预处理,如去噪、增强对比度等,以提高图像质量。
特征提取:提取与缺陷相关的特征,如边缘、颜色等,以便后续分类和识别。
缺陷分类和识别:利用分类器和识别算法对提取的特征进行分类和识别,以区分正常和异常区域。
位置确定:确定缺陷的位置,并记录下来以便后续处理。
为了验证图像法检测印刷电路板缺陷的可行性和有效性,我们进行了一系列实验。
实验流程如下:收集数据:收集具有不同缺陷类型的印刷电路板图像,包括短路、断路、线条缺失等。
数据预处理:对收集到的图像进行预处理,以提高图像质量。
特征提取:提取图像中的特征,包括颜色、边缘等。
测试模型:用测试数据集对训练好的模型进行测试,以评估模型的性能。
灵敏度:图像法检测印刷电路板缺陷的灵敏度较高,能够准确发现大部分缺陷,但对于一些微小缺陷可能有所遗漏。
精度:基于图像处理的缺陷检测方法的精度取决于特征提取和分类器设计的精度,实验表明,该方法对于大部分缺陷类型的识别精度较高,但仍有误检和漏检的情况。
灵敏度:图像法检测印刷电路板缺陷的灵敏度较高,这是因为该方法能够捕捉到图像中的细微变化,从而发现大部分缺陷。
然而,对于一些微小缺陷,由于其与正常区域的差异较小,可能会被遗漏。
精度:实验结果表明,该方法对于大部分缺陷类型的识别精度较高。
印刷电路板彩色图像分割算法研究摘要:针对印刷电路板图像颜色种类较少,色彩不连续且边界变化较快,并且焊盘层和碳路层与背景颜色差别较大,而线路层和背景颜色比较接近的特征,提出了一种阈值分割方法。
该方法基于hsi 颜色空间,针对不同对象进行分割时,根据其特点,采用不同的方法计算阈值进行分割。
关键词:图像分割;阈值;颜色空间;印刷电路板中图分类号:tp391 文献标识码:a 文章编号:1009-3044(2013)15-3634-03在印刷电路板(printed circuit board,pcb)缺陷自动检测系统中,图像处理软件是重要的核心部分,它包括图像预处理、图像分割、缺陷检测和定位。
图像分割是图像分析处理软件的核心。
近年来,彩色图像分割[1]与边缘提取技术越来越为人们所重视,其中阈值法[2]是最具代表性的方法之一。
该文在对印刷电路板彩色图像的颜色特征进行分析后,发现印刷电路板图像颜色种类较少,色彩不连续且边界变化明显,且焊盘层和碳路层与背景色差别很大,而线路层和背景颜色比较接近.针对以上特征,本文提出了针对不同对象而采取不同方法的一种阈值分割方法。
1 颜色空间转由于目前数码设备采集到的pcb图像是rgb图像,但在彩色图像处理的中,由于hsi颜色空间更接近人眼对颜色的感知,也与物体本身的特性有关,因此,该文pcb图像分割是在hsi空间进行。
从rgb到shi的转换关系为[3]:2 颜色量化本文研究的印刷电路板彩色图像单层裸板,其图像是由有限块区域组成,并且相同区域内颜色相似相近,实际需要处理的颜色数目较少,因此本文采用颜色量化的方法将相似相近的颜色归类处理。
量化后,图像由不超过256种颜色所组成。
3 pcb图像分割算法利用上述方法将rgb图像转换成hsi图像后,分别对电路板上的焊盘、线路以及碳线层进行分隔,具体方法如下:3.1 焊盘的双阈值分割算法标准焊盘显金黄色,其图像在hsi空间下色调s的范围为17—32,hsi空间上下限为固定值,因此可以利用双阈值对其进行分割。
pcb缺陷检测算法PCB(Printed Circuit Board)是电子产品中常见的一种基板,用于支持和连接电子元器件。
在制造过程中,由于各种原因,PCB上可能会出现一些缺陷,如焊接问题、线路断裂、短路等。
为了确保PCB的质量和可靠性,需要进行缺陷检测。
PCB缺陷检测算法是指通过计算机技术和图像处理技术来自动检测和识别PCB上的缺陷。
这些算法主要包括图像预处理、特征提取和缺陷分类三个步骤。
图像预处理是指对PCB图像进行一系列的处理操作,以减少噪声干扰、增强图像对比度和清晰度。
常见的图像预处理方法包括灰度化、滤波、二值化等。
灰度化是将彩色图像转化成灰度图像,通过去除颜色信息,更加便于后续处理。
滤波是采用滤波器对图像进行平滑处理,以去除噪声。
二值化是将灰度图像转化成黑白图像,以便进行形状和边缘检测。
特征提取是指从预处理后的图像中提取出有用的特征信息,用于描述和区分不同的缺陷。
常见的特征包括形状特征、纹理特征和边缘特征等。
形状特征是指通过计算缺陷的周长、面积、圆度等参数来描述缺陷的形状。
纹理特征是指通过分析缺陷区域的像素灰度分布、纹理方向等特征来描述缺陷的纹理特性。
边缘特征是指通过检测和提取缺陷区域的边缘信息,来描述缺陷的边界形状。
缺陷分类是指根据提取到的特征信息,将PCB上的缺陷进行分类和识别。
常见的分类方法包括基于规则的分类方法和基于机器学习的分类方法。
基于规则的分类方法是通过设定一系列的规则和判据,来对缺陷进行分类。
这种方法的优点是简单直观,但需要事先手动设定好规则,对于复杂的缺陷可能不适用。
基于机器学习的分类方法是通过训练一个分类模型,将提取到的特征与已知的缺陷样本进行比对和学习,然后对新的缺陷进行分类。
这种方法的优点是可以适应复杂的缺陷,但需要大量的训练样本和计算资源。
除了以上的基本步骤外,还有一些其他的技术和方法可以用于提高PCB缺陷检测的准确性和效率。
例如,可以采用多尺度分析的方法,通过对不同尺度的图像进行处理和分析,可以更好地捕捉到不同大小的缺陷。
缺陷检测系统中的图像识别算法研究与改进摘要:缺陷检测是许多行业中重要的质量控制步骤之一。
而在现代工业生产中,图像识别算法在缺陷检测系统中扮演着至关重要的角色。
如果能够对图像识别算法进行研究和改进,将有助于提升缺陷检测系统的准确性和效率。
本文将对图像识别算法在缺陷检测系统中的应用进行分析,并探讨一些可能的改进方向。
引言:随着科技的快速发展,工业生产的自动化水平不断提高,越来越多的行业开始采用缺陷检测系统来确保产品质量。
而图像识别算法作为缺陷检测系统的核心技术之一,其准确性和效率直接影响着缺陷检测系统的整体性能。
因此,研究和改进图像识别算法是提升缺陷检测系统的关键步骤。
1. 图像识别算法的应用图像识别算法在缺陷检测系统中的应用非常广泛。
它可以用于检测各种不同类型的缺陷,如裂纹、磨损、变形等。
根据缺陷的形态和材料的特性,我们可以选择不同的图像识别算法来进行缺陷的识别和分类。
2. 常见的图像识别算法在缺陷检测系统中,常见的图像识别算法包括传统的机器学习算法和基于深度学习的算法。
传统的机器学习算法,如支持向量机、决策树和随机森林等,主要通过对图像的特征提取和分类来进行缺陷检测。
而基于深度学习的算法,如卷积神经网络和循环神经网络等,可以直接从图像中学习特征,并进行缺陷的检测和分类。
3. 图像识别算法的改进方向为了提升缺陷检测系统的准确性和效率,我们可以从以下几个方面对图像识别算法进行改进。
3.1 特征提取算法的改进特征提取是图像识别算法中的关键步骤之一。
传统的特征提取算法通常需要手动选择并设计特征,但这种方法存在主观性和局限性。
因此,我们可以通过使用深度学习算法来自动学习图像中的特征,从而提高特征的表达能力。
3.2 模型优化算法的改进很多图像识别算法采用了深度神经网络模型,但训练这些模型常常需要较长的时间和大量的计算资源。
因此,我们可以研究和改进模型优化算法,以降低模型的训练时间和资源消耗,提高整个缺陷检测系统的实时性和效率。
缺陷图像识别算法研究随着工业生产的发展,产品质量的要求越来越高。
而在生产过程中,往往会出现一些缺陷导致产品质量下降。
因此,如何快速准确地识别和检测出产品的缺陷,一直是工业界关注的重点。
为了解决这个问题,缺陷图像识别算法应运而生。
缺陷图像识别算法,简单来说,就是通过对生产过程中采集到的产品图像进行分析和处理,以便快速准确地判断产品是否存在缺陷。
这种算法通常在视觉检测系统中应用,在生产线上直接对产品进行实时检测,并能够及时发现并报警。
目前,有很多种缺陷图像识别算法可供选择,每种算法都有其适用的场景和优缺点。
以下将从常见的几种算法进行介绍。
1. 基于传统图像处理的算法这类算法主要是利用图像的灰度、纹理、对比度等特征进行分析,通过提取缺陷所特有的特征,与正常产品的特征进行对比来进行缺陷识别。
这类算法简单易懂,计算效率高,但不适用于复杂的缺陷场景。
2. 基于机器学习的算法机器学习算法可以自动学习和识别图像中的缺陷特征,通过训练样本来建立模型,从而能够在真实场景中进行缺陷识别。
常见的机器学习算法包括支持向量机(SVM)、人工神经网络(ANN)等。
这类算法不仅可以进行特征提取,还可以进行分类和识别。
3. 基于深度学习的算法深度学习算法是近年来兴起的一种算法,它能够通过神经网络以及深层次的学习,自动提取图像中的缺陷特征,并能够对图像进行准确快速的分类和识别。
常见的深度学习算法包括卷积神经网络(CNN)和循环神经网络(RNN)。
这类算法在缺陷图像识别中具有较高的准确率和鲁棒性。
除了选择合适的算法之外,还有几个关键问题需要注意。
首先是数据预处理。
在进行缺陷图像识别之前,需要对采集到的图像进行一些处理,如去噪、锐化、尺度归一化等,以确保算法对图像特征的识别准确性。
其次是特征提取。
针对不同的缺陷,需要选择合适的特征提取方法,如边缘检测、纹理分析等,以便从图像中提取出能够描述缺陷的关键特征。
最后是算法评估。
为了确保缺陷图像识别算法的准确性和鲁棒性,需要对算法进行评估和优化。
缺陷检测中的图像处理方法及性能评估图像处理在缺陷检测中起着重要的作用。
本文将介绍缺陷检测中常用的图像处理方法,并对它们的性能进行评估。
在缺陷检测中,图像处理方法广泛应用于各个领域,如工业生产中的产品质量检测、医疗影像中的病灶检测等。
图像处理方法的目标是从原始图像中提取出缺陷信息,以便进行识别和分析。
常见的图像处理方法包括滤波、分割和特征提取。
首先,滤波技术用于去除图像中的噪声,以提高缺陷的可见性。
常用的滤波方法包括均值滤波、中值滤波和高斯滤波。
均值滤波是一种简单的滤波方法,通过计算像素周围邻域的平均值来减少噪声。
中值滤波则是通过计算像素周围邻域的中值来去除噪声。
高斯滤波利用高斯函数对图像进行模糊处理,从而减少噪声。
其次,分割技术用于将图像分割成不同的区域,以便对每个区域进行进一步的处理。
常用的分割方法有阈值分割、边缘检测和区域生长。
阈值分割是一种简单而有效的方法,通过设置一个特定的灰度值作为分割的阈值,将图像分割成两个区域。
边缘检测则是通过寻找图像中的不连续性来进行分割,常用的边缘检测算法有Sobel算子和Canny算子。
区域生长方法则是从种子点开始,根据一定的准则将相邻的像素点划分到同一个区域。
最后,特征提取是指从分割后的图像中提取出具有区分度的特征,以进行缺陷的识别和分类。
常用的特征包括颜色、纹理和形状。
颜色特征可以通过计算像素的颜色直方图来表示,用于区分不同颜色的缺陷。
纹理特征则是描述图像局部区域的纹理信息,常用的纹理特征包括灰度共生矩阵和小波变换。
形状特征则是描述图像缺陷的形状信息,常用的形状特征有面积、周长和紧凑度等。
为了评估图像处理方法在缺陷检测中的性能,可以使用一些常见的指标,如精度、召回率和F1值。
精度是指被正确分类为缺陷的样本占所有被分类为缺陷的样本的比例。
召回率是指被正确分类为缺陷的样本占所有真实缺陷样本的比例。
F1值是精度和召回率的调和平均值,是一个综合评价指标。
除了传统的图像处理方法,近年来深度学习在缺陷检测中也取得了重要进展。
第17卷第9期2017年3月 1671 — 1815(2017)09-0221-08科学技术与工程Science Technology and EngineeringVol. 17 No. 9 Mar. 2017©2017 Sci. Tech. Engrg.自动化技术、计算机技术一种改进的印刷电路板缺陷检测分割算法胡艺杨帆!潘国峰(河北工业大学,天津300401)摘要针对印刷电路(PCB)板缺陷检测分割中存在分割效果差、运行速度慢以及适用范围小的问题,提出一种改进的基于 遗传算法的二维最大类间方差法的快速迭代算法。
首先利用改进的遗传算法来确定分割中的最优阈值,再将这个最优阈值 应用到二维最大类间方差法快速迭代算法中来确定最终的阈值最优解,从而完成分割。
仿真实验表明,该算法分割的P C B图像,更加接近于人工标注的结果,最终的精度和K a p p a系数达到了 98. 68%和0.9706,具有广泛的应用前景。
关键词图像分割 二维最大类间方差法 遗传算法中图法分类号T P301.6; 文献标志码A在现代电子产业中,印制电路板(p rin te d c irc u itN〇a r d,P C B)在各个电路组成搭建中扮演着不可缺 失的重要地位。
P C B板质量的好坏很大程度的影 响到最后成品电路的质量,于是对P C B进行质量检 测就显得尤为重要。
对P C B缺陷检测由最初通过 流水线上的人工检测,演变到现在运用机器视觉的 A0I和A X I检测。
在这些检测方式中自动光学检测 技术(A O I,autom atic o p tic is p e c tio n)已经成为大部 分应用中所用到的技术,在生产中起着至关重要的 作用。
其中,图像分割又是关键的一步。
很好的分 割一个P C B板,在后续的识别检测中可以节省大量 时间。
其中,阈值分割是分割中重点研究的对象,科 研人员已经提出了多种阈值分割方法,1979年日本 学者大津提出的一种自适应式的阈值确定方法,简 称0T S U,又称为最大类间方差法[1];该方法根据图 像的一维灰度直方图,用穷举的方式来选取类间方 差最大的阈值。
印制电路板缺陷图像边缘检测
乔闹生
【期刊名称】《光子学报》
【年(卷),期】2016(0)4
【摘要】为了提取含噪声印制电路板(PCB)光板缺陷图像边缘信息,提出了一种基于混合法的图像边缘检测方法.在分析类间最大距离法图像分割基本原理的基础上提出了一种改进的类间最大距离法(IMDBC);设计了结合中值滤波、IMDBC、改进的数学形态学边缘检测算子与LOG算子进行PCB光板缺陷图像边缘检测的混合方法.用CCD及显微镜成像系统获取4幅PCB光板缺陷图像,结果表明:用本文方法提取出的图像边缘信息清晰且较精确,噪声点较少,所得到的4幅图像优质系数是其它6种方法的1.0111-1.3586倍.
【总页数】7页(P117-123)
【关键词】边缘检测;图像分割;印制电路板缺陷图像;改进的类间最大距离法;改进的数学形态学;LOG算子
【作者】乔闹生
【作者单位】湖南文理学院物理与电子科学学院
【正文语种】中文
【中图分类】O439
【相关文献】
1.基于图像处理的印制电路板缺陷检测研究 [J], 王家宏
2.基于图像处理的印制电路板缺陷自动检测 [J], 杨顺辽;苏明;钟立;李泽军
3.基于图像融合的竹塑复合材内部缺陷边缘检测研究 [J], 孙绩婷;戚大伟
4.基于阈值优化的带钢表面缺陷图像边缘检测研究 [J], 黎浩;汤勃;孔建益;王兴东
5.轴承缺陷图像二值化处理及形态学边缘检测 [J], 石炜;张袁祥
因版权原因,仅展示原文概要,查看原文内容请购买。
基于ORB算法及图像差分的PCB缺陷检测
郭战岭;徐雷;冉光再;陈建华
【期刊名称】《数字技术与应用》
【年(卷),期】2022(40)3
【摘要】为解决PCB缺陷传统人工检测方法误检率高、效率低等问题,提出一种基于ORB算法和图像差分的PCB缺陷检测方法。
该方法首先使用ORB算法将待测图与模板图进行配准,而后对待测图进行图像预处理以减少噪声提高图片质量,之后对差分后的图像进行去噪,形态学处理及图像二值化,最后在待测图上标记出缺陷的位置并统计缺陷总数。
实验结果表明,该方法对本文研究的六种缺陷的平均缺陷检测准确率达94.6%,每张待测图平均检测耗时少于3s。
【总页数】5页(P38-41)
【作者】郭战岭;徐雷;冉光再;陈建华
【作者单位】四川大学机械工程学院
【正文语种】中文
【中图分类】TP391.41
【相关文献】
1.钢球表面缺陷的图像差分检测算法
2.PCB图像线宽线距缺陷检测算法研究
3.基于图像处理技术的PCB板缺陷检测系统设计
4.基于改进模板匹配及图像差分法的PCB板缺陷多级检测方法
5.基于彩色图像模板匹配的PCB多缺陷集中检测
因版权原因,仅展示原文概要,查看原文内容请购买。
PCB的缺陷检测中局部自适应分割算法的应用发表时间:2019-09-10T15:27:28.937Z 来源:《城镇建设》2019年第14期作者:叶卫[导读] 在现阶段有着许多的依托于机器视觉的检测,这种检测在PCB检测当中得到了较为广泛的应用。
江门崇达电路技术有限公司广东江门 529000摘要:在现阶段有着许多的依托于机器视觉的检测,这种检测在PCB检测当中得到了较为广泛的应用。
但是这种检测方法也有着较为显著的检测效率不高的问题。
为了对这个问题进行有效的解决,在实际的算法当中提出了局部阈值分割方法,这种方法与全局的分割有着较大的不同,与此同时根据实际的检测情况来针对PCB缺陷检测进行数学形态运算结构元素的选择,用这种方式完成PCB图像的形态滤波,在此之后能够得到PCB边缘信息。
从仿真分析的结果来看,效果较为显著,能够被较好的使用。
关键词:PCB缺陷检测;局部自适应分割算法;边缘检测在现阶段电子信息技术得到不断发展的情况之下,越来越多的人开始重视电路板的图像处理,而在实际的PCB缺陷检测之中,经常会用到人工检测以及依托于机器视觉的检测方法,而后者在当前科学技术不断发展的情况之下有着越来越广泛的应用趋势。
这种检测主要是通过摄像头来得知具体的电路板图像,在此之后将图像传输到计算机上来进行进一步的滤波、边缘检测等来得知其缺陷信息,这种获取形式有着自身的高效优点,但是在进行边缘信息获取的时候却无法完全考虑环境和场合带来的影响,就导致所获取的边缘信息的准确性不能得到保障。
面对这种精确性不能得到保障的问题,本文将对局部自适应分割算法进行分析,在利用此种算法的基础上加上数学形态来完成边缘检测PCB图像的任务。
1.PCB图像边缘检测流程首先文章将先行分析PCB图像边缘检测流程,从这个角度出发能够先了解边缘检测当中的各个环节,使下文当中实际的局部自适应以及数学形态的分析更为完整。
在实际的边缘检测当中,首先要做的就是通过摄像头的使用来得到相关图像,具体的图像拍摄可能会受到来自噪声等客观因素的干扰,这些干扰会让边缘检测的结果变得不精确,为了解决这个问题,就必须在图像灰度化之后再行对其进行滤波,在此之后通过局部自适应分割算法来得到图像阈值,并且在此基础上对PCB图像进行实际的分割,分割之后可完成边缘检测。
PCB 缺陷检测中图像分割算法的分析与比较摘要:图像分割在图像处理中占有重要的地位,分割结果的好坏直接影响图像的后续处理。
本文介绍了4种常用的图像分割方法及其在PCB 缺陷检测中的应用,并且利用实际的分割效果对4种分割方法进行了比较。
对PCB 检测的实际应用提出了一种比较好的图像分割思路,并且做了实验研究。
关键词:图像处理;图像分割;PCB 检测引言:图像分割是图像处理中的一项关键技术,分割结果的好坏直接影响到图像的后续处理。
本文中图像分割的目的是根据图像灰度等级准确划分出其中有意义的目标区域。
但是由于系统在PCB 图像的采集、传输过程中,由于光照不均,CCD 摄像机自身的电子干扰,都不同程度的带来噪声,使图像污染。
这些噪声也给图像分割带来了一定的难度。
而传统的图像分割方法针对实际应用,本文分别采用四种公认比较好的分割方法对PCB 图像进行分割,并对分割效果进行了比较,最后确定了适合PCB 检测的图像分割方法。
下面对它们进行具体说明。
1. 基于标准图像的模糊推理法模糊理论在图像处理中的应用越来越广。
在图像分割中,它可以把数据的校验用一些模糊规则来进行描述。
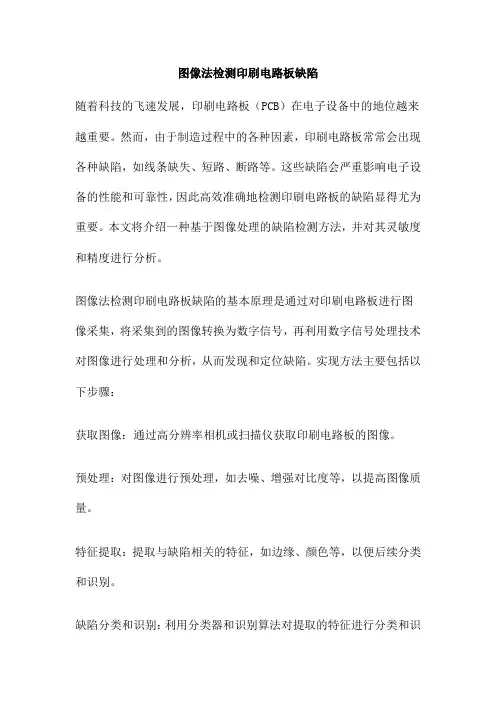
用基于标准图像的模糊推理法进行图像的分割主要包括以下几步[1]:(1) 计算原始图像的灰度直方图并用迭代阈值法计算它的阈值; (2) 寻找目标和背景的像素簇的峰值;(3) 计算LD(象素值低与较低之间的阈值)和LB (像素值高与较高之间的阈值); (4) 使用模糊逻辑方法(FLM-fuzzy linguistic method )来获取二值图像数据; 待处理PCB 图像的灰度直方图如图1所示图1 像素值直方图 Fig.1 Pixel value histogram背景和目标对象是直方图中的两个簇。
这里采用迭代阈值的方法来求取待检测图像的阈值。
具体过程如下[2]:1) 求出图像中的最小和最大灰度值H min 及H max ,令阈值初始值为:T0像素数 像素值Dark maxthreshold Bright max255(=12(H min +H max ) (1)(2) 根据阈值T K 将图像分割成目标和背景两部分,求出两部分的平均灰度值H 0、H b 及新的阈值T k+10kkk T <k k T kh kH h<=∑∑ (2)kkk T >k k T b kh kH h >=∑∑ (3)T k+1=1(H +H 2素个数。
(1)按(2)中0b 式中,h k 是灰度值为k 的像的算式进行迭代,直到T k+1=T k 时结束 方图上看,由此得到的阈值处在两个灰度区域重心的平均位置,从路径规划的角度看是一种最优阈值,它可以概略地将目标、背景分成两类,因而可认为t b =T k 。
但要精确地分割出背景,还必须结合其实际分布情况来考虑。
在通常情况下,目标簇和背景簇都会有一个峰值,在这里用Dark max 代表背景簇的峰值,Bright max 代表目标簇的峰值。
通过下面两个式子来计算LD 与LB 。
LD=(Dark max +Threshold)/2 (5) old)/2 (6)因此,模糊逻辑的成员函数可以获得,如图2 所示。
每一个规度范围内的像素值都会属于Dark,Light Dark,Light Bright 和Bright 四个成员之一。
图2 输入的成员函数令F(x,y)是FLM 成员函数的输F 1(x,y),F 2(x,y), F 3(x,y),F 1) (4),取结束时的T k 为分割阈值。
从直LB=(Bright max +ThreshFig.2 Memberships function of input入,F c (x,y)是3×3模板的中心像素,F 4(x,y)是这个模板的四邻域,如图3所示。
F 2F c F 4F 3图3 3×3模板的4邻域Fig.3 4-neighborhood of a 3×3 maskS(x,y)是FLM的输入的参考图像数据。
它可以是PCB设计图像数据,S(x,y)必须与F c (x,y)相互对应。
下面为FLM定义了四种环境规则。
S(x,y)必须与F c (x,y)相互对应。
1) Bright 环境 如果F 1(x,y), F 2(x,y), F 3(x,y), F 4(x,y)中有4个是Bright,或者其中有3个为Bright和1个Light Bright,则F c (x,y)为Bright2) Dark 环境:如果F 1(x,y), F 2(x,y), F 3(x,y), F 4(x,y)中有4个是Dark,或者其中有3个Dark 和1个Light Dark,则F c (x,y)为Dark (3) Light Bright 环境如果F 1(x,y), F 2(x,y), F 3(x 1,则F c (x,y)为Light Bright ,境值为Dark的个数超过1,则F c (x,y)为Light Dark数的输出是中心像素的状态,用B(x,y)来表示,它的位置也和F c (x,y)相对应,并且是二图像数据,FLM的具体描述如下:(1) If(F c (x,y) is Dark) and (S() i ck nd),then (B(x,y) is Background);(2) If(F c (x,y)is Dark) and (S(x,y) is Object)and (F 1(x,y), F 2(x,y), F 3(x,y), F 4(x,y) is Bright Environment),then B(x is bject),else(B(x,y) is Background); (3) If(F c (x,y)is Bright) and (S(x,y) is Object),then(B(x,y) is Object);(4) If(F c (x,y)isBright) and s ro nd (F 1(x,y), F 2(x,y), F 3(x,y), F 4(x,y) is Dark nd),else (B(x,y) is Object);(6) If(F c (x,y)isLight Dark) and (S(x,y) is Object) and (F 1(x,y), F 2(x,y), F 3(x,y), ht Bright Environment or Bright Environment), then (B(x,y) is )B((7) I is Object),then (B(x,y) is Object); Light Bright) and (S(x,y) is Background) and (F 1(x,y), F 2(x,y),F 3(x, is a t); 又保留了图像的细节特征,是一种有效的图像分割方法,高,否则就会影响分割效果。
4-(a )为原始的采集图像,它是c 逻辑方法的处理结果。
( (,y), F 4(x,y)中环境值为Bright的个数超过(4) Light Dark 环境如果F 1(x,y), F 2(x,y), F 3(x y), F 4(x,y)中环函值x,y s Ba grou O (,y)(S(x,y) i Backg und) a Environment),then (B(x,y) is Backgrou (5) If(F c (x,y )is Light Dark) and (S(x,y) is Background),then (B(x,y) is Background);F 4(x,y) is Lig Object ,else (x,y) is Background);f(F c (x,y)is Light Bright) and (S(x,y)(8) If(F c (x,y) is y), F 4(x,y) is Light Dark Environment or Dark Environment),then (B(x,y) B ckground),else (B(x,y) is Objec 这种模糊逻辑方法去除噪声的同时,但是它也有个缺点,就是在使用这种方法之前,待处理图像和标准图像的校准精度要以下是通过具体的实验对一幅图像进行处理的效果图,图PCB 上的一个焊盘,图4-(b )为处理过程中采用的参考图像,图4-()为采用模糊(b )参考图像(二值) (c )处理后图4 模糊推理方法进行图像分割的效果Fig.4 Results of image segmentation with fuzzy reasoning method. 基于梯度调整的矩量保持法 2.1 矩量保持法[3]其基木,2,…,(a )原始图像2思想是使阈值分割前后图像的矩保持不变。
设每个点从具有灰度值g ∈{0, 1},其中L 为灰度级总数,并用N i (i ∈{0,1, …,L -1})1L −表示第i 个灰度级在图像中出现的次数,表示灰度级i 出现的频率:P=N i /N第k 矩m k 定义为:m 0=1; L kk i m p i−=阶1i =∑ k=1,2, (7)对于二值化图像,意味着保持前3阶矩不变,即存在如下矩量保持方程组:0000110p Z p Z m += (8) 1100111p Z p Z m += (9)2200112p Z p Z m += (10)3300113p Z p Z m += (11)这里Z 0和Z 1,表示二值化后每个类别代表灰度值,p 0和p 1代表二值化后两个灰度值的分布概率,经简化后1021/2p d m −10(4)c c =(12)−其中,1320221m m m m m c −=−1232m m c m m 121m −=−21/2101[(4)]2d c c 1c =−−然后从灰度级直方图中选取阈值t 最为接近2.2 矩量保持法的梯度调整[4]进行图像分割。
这种分割方法在实际应用中,发现分割后的目标边缘细节信息有很大的丢失。
通过对算法原理及不足点的分析,可以利用图像中目标边界和相邻背景的灰度差别较大,而目标区域或背景区域内部像素间的灰度差别较小的特性,进矩量保持自动阈值法,改进后的算法的基本原理如下:首先由矩量保持法得到初始分割阈值t ,然图像进行处理,计算出图像的梯度分布。
设现行扫描点、后一行扫描点和下一列中相邻点的灰度为f(i,j),f(i+1,j)和f(i,j+1),在x,y 方向上的一阶差分定义为:p 0-分位数。
矩量保持法是根据样本估计总体的特性推导而出,是根据图像的整体信息用梯度调整来改后利用梯度算子对(,)(1,)(,)(,)(,1)(,)X yf i j f i j f i j f i j f i j f i j Δ=+−⎧⎨Δ=+− (13) ⎩梯度定义为:G=(,)(,)X y f i j i f i j j Δ+Δ (14)1/2 (15)为了简便计算,梯度模G[f(i,j)]选用如下的近似公式:G[f(i,j)]=max[其模为:22||[((,))((,))]X y G f i j f i j =Δ+Δ|(,)X f i j Δ|,|(,)y f i j Δ|] (16)根据计算出的梯度模,找出边缘像素。