模型预测控制及其MATLAB实现
- 格式:pdf
- 大小:708.10 KB
- 文档页数:38
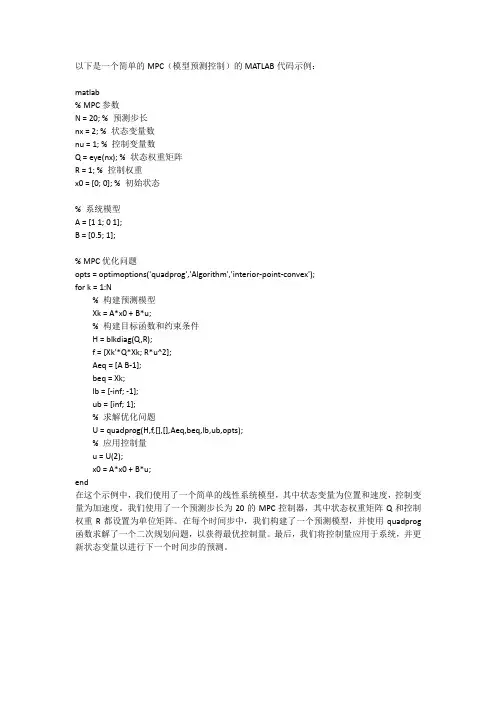
以下是一个简单的MPC(模型预测控制)的MATLAB代码示例:matlab% MPC参数N = 20; % 预测步长nx = 2; % 状态变量数nu = 1; % 控制变量数Q = eye(nx); % 状态权重矩阵R = 1; % 控制权重x0 = [0; 0]; % 初始状态% 系统模型A = [1 1; 0 1];B = [0.5; 1];% MPC优化问题opts = optimoptions('quadprog','Algorithm','interior-point-convex');for k = 1:N% 构建预测模型Xk = A*x0 + B*u;% 构建目标函数和约束条件H = blkdiag(Q,R);f = [Xk'*Q*Xk; R*u^2];Aeq = [A B-1];beq = Xk;lb = [-inf; -1];ub = [inf; 1];% 求解优化问题U = quadprog(H,f,[],[],Aeq,beq,lb,ub,opts);% 应用控制量u = U(2);x0 = A*x0 + B*u;end在这个示例中,我们使用了一个简单的线性系统模型,其中状态变量为位置和速度,控制变量为加速度。
我们使用了一个预测步长为20的MPC控制器,其中状态权重矩阵Q和控制权重R都设置为单位矩阵。
在每个时间步中,我们构建了一个预测模型,并使用quadprog 函数求解了一个二次规划问题,以获得最优控制量。
最后,我们将控制量应用于系统,并更新状态变量以进行下一个时间步的预测。



在MATLAB中,MPC(模型预测控制)函数可用于实现模型预测控制(MPC)算法。
MPC是一种先进的控制策略,用于处理具有预测模型的连续或离散时间线性系统。
它通过优化性能指标并限制未来的行为,实现对系统的控制。
要使用MATLAB的MPC函数,您需要遵循以下步骤:
1. 定义模型:首先,您需要定义系统的模型。
这可以是一个线性时不变(LTI)系统,也可以是一个非线性系统。
您可以使用MATLAB 的控制系统工具箱中的函数(如`tf`,`ss`等)来定义模型。
2. 定义优化问题:接下来,您需要定义优化问题。
优化问题应包括预测模型、性能指标和约束条件。
在MPC中,预测模型通常是一个预测矩阵,用于预测未来的系统状态。
性能指标可以是控制变量的权重或状态变量的权重。
约束条件可以是控制变量的限制或状态变量的限制。
3. 调用MPC函数:一旦您定义了模型和优化问题,您可以使用MATLAB的MPC函数来求解优化问题并生成控制序列。
常用的MPC函数包括`mpcmin`和`mpcmove`。
4. 应用控制序列:最后,您需要将生成的control sequence应用于系统。
这可以通过使用一个数字或模拟控制器来实现。
这些步骤是使用MATLAB的MPC函数进行模型预测控制的一般流程。
但是,请注意,具体的实现方法可能会因应用而异。
建议查阅MATLAB的官方文档以获取更详细的信息和使用示例。
MATLAB中的模型预测控制算法实现方法1. 引言模型预测控制(Model Predictive Control,MPC)是一种广泛应用于工业过程控制的先进控制策略。
它基于数学模型对系统未来行为进行预测,并通过优化算法计算出最优控制输入,以实现对系统的稳定控制和性能优化。
在MATLAB中,实现MPC算法可以借助一些工具箱和函数,本文将介绍其中一种典型方法。
2. MPC算法的基本原理MPC算法通过建立系统的数学模型,预测系统未来的行为。
在每个控制时刻,MPC算法根据已知的系统状态和控制目标,计算出最优的控制输入,并将其应用于系统中。
这个优化问题可以通过求解一个多目标优化问题来完成。
3. MATLAB中的MPC工具箱MATLAB的Control System Toolbox提供了一个用于设计和实现MPC控制器的工具箱。
首先,我们需要使用命令"mpc"创建一个空白的MPC对象。
然后,我们可以通过指定MPC对象的属性来定义系统模型、控制目标、约束条件等。
4. 构建系统模型在MPC算法中,必须先构建系统的数学模型。
在MATLAB中,可以使用State Space工具箱中的ss或tf函数构建系统模型。
我们可以根据实际系统的特点选择不同的模型结构。
例如,对于连续时间系统,可以使用连续时间状态空间模型或传递函数模型;对于离散时间系统,可以使用离散时间状态空间模型或传递函数模型。
5. 设置MPC对象属性创建MPC对象后,我们需要设置一些重要的属性。
其中,PredictionHorizon属性定义了预测时间窗口的长度,即MPC算法根据模型预测未来的时长;ControlHorizon属性定义了控制时间窗口的长度,即MPC算法计算最优控制输入的时间长度。
一般来说,预测时间窗口应大于控制时间窗口。
6. 设定控制目标与约束条件MPC算法的目标是使系统的输出尽可能地接近控制目标,并同时满足一定的约束条件。
一、简介MATLAB(Matrix Laboratory)是一种用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境。
MATLAB被广泛应用于科学和工程领域,特别是在控制系统设计和模拟方面具有重要的作用。
在控制方面,MATLAB提供了丰富的工具和函数,可用于设计、分析和实现各种类型的控制系统,并且提供了许多示例来帮助用户更好地理解控制系统。
二、控制系统的建模和仿真1. 实例一:DC电机控制假设我们希望设计一个用于控制直流电机的系统。
我们可以使用MATLAB来建立直流电机的数学模型,并使用Simulink进行仿真。
通过编写方程或使用Simulink的模块化建模工具,我们可以描述电机的动态行为和控制器的工作原理,从而获得一个完整的控制系统模型。
我们可以通过仿真来评估不同的控制策略,优化系统性能,并进行实验验证。
2. 实例二:PID控制器设计在控制系统中,PID(Proportional-Integral-Derivative)控制器是一种常用的控制器类型。
使用MATLAB中的Control System Toolbox,我们可以设计和调试PID控制器。
我们可以通过输入系统的传递函数或状态空间模型来创建控制系统对象。
可以利用Control System Toolbox提供的自动调整功能,根据系统的要求和性能指标,自动调整PID控制器的参数来实现系统稳定和性能优化。
三、控制系统分析和优化1. 实例三:系统频域分析在设计控制系统时,频域分析是一种重要的方法。
MATLAB提供了许多函数和工具,可用于进行频域分析。
我们可以使用bode函数来绘制系统的频率响应曲线,了解系统的增益和相位裕度,并进行稳定性分析。
MATLAB还提供了工具来进行奈奎斯特图和极点分析等分析方法,帮助用户更好地理解系统的动态特性。
2. 实例四:多目标优化在实际控制系统设计中,通常需要同时满足多个设计指标,例如稳定性、快速响应和抑制干扰等。

模型预测控制及其MATLAB实现模型预测控制(Model Predictive Control, MPC)是一种先进的控制算法,用于处理动态系统的控制问题。
MPC通过在未来的时间范围内优化控制动作序列,以使系统的性能指标最小化,从而实现对系统的优化控制。
MPC的核心思想是建立一个系统模型,然后使用该模型来预测系统的行为,并根据预测结果进行优化控制决策。
具体而言,MPC首先使用系统模型对未来的状态和输出进行预测,然后根据预测结果计算出最优的控制动作序列。
接下来,仅施加最优的第一个控制动作,并在下一个采样时刻重复该过程。
这种迭代优化的过程可以使系统在每个采样时刻都能够进行最优的控制。
MPC的优势在于它可以处理多变量、非线性和时变系统,并且可以轻松地加入约束条件。
此外,MPC还能够在面对不确定性和扰动时提供鲁棒性,以确保控制系统的稳定性和性能。
因此,MPC在多个领域中都得到了广泛的应用,例如化工、能源、机械等。
在MATLAB中,有多种方法可以实现MPC控制算法。
最简单的方法是使用MPC工具箱,该工具箱提供了一套全面的函数和工具,用于建立系统模型、设定控制参数、优化控制决策等。
使用MPC工具箱,可以通过以下几个步骤来实现MPC控制:1.建立系统模型:使用MATLAB的系统建模工具箱,建立系统的状态空间模型或传递函数模型。
2.设定控制参数:根据系统的性能指标和控制目标,设定MPC控制的参数,例如控制时域、控制权重和约束条件等。
3.优化控制决策:使用MPC工具箱提供的优化函数,根据系统模型和控制参数,计算最优的控制动作序列。
4.实施控制动作:根据最优的控制动作序列,施加最优的第一个控制动作,并等待下一个采样时刻。
5.重复步骤3和4:在每个采样时刻,重复步骤3和4,以实现迭代优化控制。
请注意,MPC控制算法的实现还可能涉及其他细节,例如状态估计、鲁棒性设计和性能评估等。
因此,在具体应用中,可能需要根据系统的特点和需求进行相应的调整和扩展。
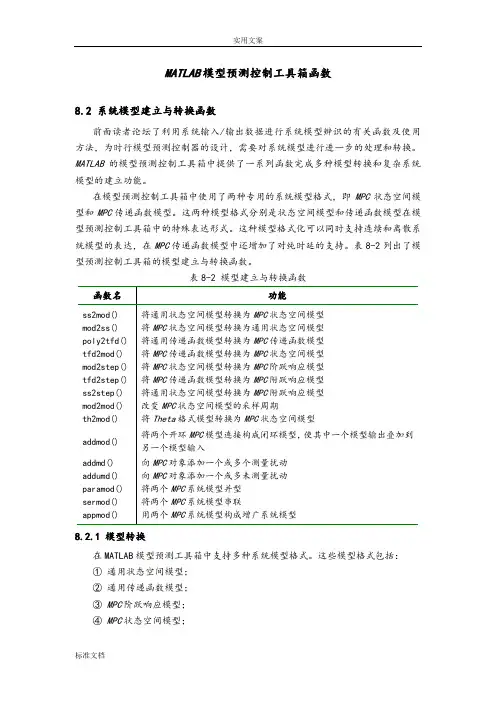
MATLAB模型预测控制工具箱函数8.2 系统模型建立与转换函数前面读者论坛了利用系统输入/输出数据进行系统模型辨识的有关函数及使用方法,为时行模型预测控制器的设计,需要对系统模型进行进一步的处理和转换。
MATLAB的模型预测控制工具箱中提供了一系列函数完成多种模型转换和复杂系统模型的建立功能。
在模型预测控制工具箱中使用了两种专用的系统模型格式,即MPC状态空间模型和MPC传递函数模型。
这两种模型格式分别是状态空间模型和传递函数模型在模型预测控制工具箱中的特殊表达形式。
这种模型格式化可以同时支持连续和离散系统模型的表达,在MPC传递函数模型中还增加了对纯时延的支持。
表8-2列出了模型预测控制工具箱的模型建立与转换函数。
表8-2 模型建立与转换函数8.2.1 模型转换在MATLAB模型预测工具箱中支持多种系统模型格式。
这些模型格式包括:①通用状态空间模型;②通用传递函数模型;③MPC阶跃响应模型;④MPC状态空间模型;⑤ MPC 传递函数模型。
在上述5种模型格式中,前两种模型格式是MATLAB 通用的模型格式,在其他控制类工具箱中,如控制系统工具箱、鲁棒控制工具等都予以支持;而后三种模型格式化则是模型预测控制工具箱特有的。
其中,MPC 状态空间模型和MPC 传递函数模型是通用的状态空间模型和传递函数模型在模型预测控制工具箱中采用的增广格式。
模型预测控制工具箱提供了若干函数,用于完成上述模型格式间的转换功能。
下面对这些函数的用法加以介绍。
1.通用状态空间模型与MPC 状态空间模型之间的转换MPC 状态空间模型在通用状态空间模型的基础上增加了对系统输入/输出扰动和采样周期的描述信息,函数ss2mod ()和mod2ss ()用于实现这两种模型格式之间的转换。
1)通用状态空间模型转换为MPC 状态空间模型函数ss2mod ()该函数的调用格式为pmod= ss2mod (A,B,C,D)pmod = ss2mod (A,B,C,D,minfo)pmod = ss2mod (A,B,C,D,minfo,x0,u0,y0,f0)式中,A, B, C, D 为通用状态空间矩阵;minfo 为构成MPC 状态空间模型的其他描述信息,为7个元素的向量,各元素分别定义为:◆ minfo(1)=dt ,系统采样周期,默认值为1;◆ minfo(2)=n ,系统阶次,默认值为系统矩阵A 的阶次;◆ minfo(3)=nu ,受控输入的个数,默认值为系统输入的维数;◆ minfo(4)=nd ,测量扰的数目,默认值为0;◆ minfo(5)=nw ,未测量扰动的数目,默认值为0;◆ minfo(6)=nym ,测量输出的数目,默认值系统输出的维数;◆ minfo(7)=nyu ,未测量输出的数目,默认值为0;注:如果在输入参数中没有指定m i n f o ,则取默认值。
利用Matlab进行模型预测控制的技术方法引言在工业控制过程中,模型预测控制(Model Predictive Control,MPC)是一种有效的控制策略,它基于对系统建立的数学模型进行预测,并通过优化目标来产生最优的控制动作。
在过去的几十年中,MPC已经得到了广泛的应用,并且在各个领域都取得了显著的成果。
本文将介绍利用Matlab进行MPC的技术方法,包括建立系统模型、设置优化问题、解决优化问题以及实时控制实现等方面。
一、建立系统模型在进行MPC控制之前,首先需要建立系统的数学模型。
系统模型可以是连续时间的,也可以是离散时间的。
对于连续时间系统,可以采用常微分方程描述,而对于离散时间系统,可以采用差分方程描述。
在Matlab中,可以使用符号计算工具箱进行方程的推导和求解,得到系统的数学模型表达式。
以一个简单的控制系统为例,假设系统的控制目标是使温度保持在某一设定值附近。
我们可以基于物理原理建立一个温度控制的数学模型:```dx/dt = -a*x + b*uy = c*x```其中,x表示温度,u表示控制输入,y表示控制输出,a、b和c为系统的系数。
通过符号计算工具箱,可以推导出描述系统演化的微分方程,并将其转化为离散时间的差分方程。
二、设置优化问题在MPC中,需要设置一个优化问题来求解最优控制动作。
通常,优化目标包括使系统的输出误差最小化、使控制信号的变化量最小化等。
同时,还需要考虑系统的约束条件,如输入变量的限制、输出变量的限制等。
在Matlab中,可以使用优化工具箱来设置和求解优化问题。
对于上述温度控制系统,优化问题可以设置为最小化输出误差的平方和,并且限制控制输入的取值范围:```minimize J = ∑ (y_ref - y)^2subject to u_min ≤ u ≤ u_max```其中,J表示优化目标,y_ref表示参考输出,u_min和u_max表示控制输入的最小和最大取值。
在Matlab中进行回归分析和预测模型的技术在当今数据驱动的社会中,回归分析和预测模型成为了数据科学领域中不可或缺的技术。
在这方面,Matlab作为一个功能强大且广泛应用的数学软件包,为进行回归分析和预测模型提供了丰富的工具和函数。
本文将探讨在Matlab中使用回归分析进行数据建模和预测的技术。
首先,回归分析是一种通过建立一个数学方程来描述变量之间关系的统计方法。
它常用于研究自变量(也称为预测变量)与因变量之间的关系。
在Matlab中,回归分析主要通过线性回归模型来实现。
线性回归模型假设因变量与自变量之间存在线性关系。
在Matlab中,可以使用regress函数来拟合线性回归模型。
该函数可以通过最小二乘法估计回归系数,使得预测变量与实际观测值之间的残差平方和最小化。
除了线性回归模型,Matlab还提供了其他类型的回归模型,如多项式回归模型、岭回归模型和弹性网络回归模型等。
多项式回归模型通过增加自变量的多项式项来处理非线性关系。
岭回归模型和弹性网络回归模型则通过引入正则化项来解决多重共线性问题,提高模型的鲁棒性和预测能力。
在进行回归分析时,特征工程是一个重要的环节。
特征工程涉及到对原始数据进行处理和转换,以提取对模型建立和预测有用的特征。
在Matlab中,可以利用数据预处理工具箱来进行特征工程。
数据预处理工具箱提供了一系列函数和工具来处理数据中的缺失值、异常值和重复值,进行特征选择和降维,并进行数据标准化和归一化等操作。
通过合理的特征工程,可以提高模型的性能和准确度。
除了回归分析,预测模型在许多实际应用中也起着重要的作用。
预测模型可以根据历史数据和趋势来预测未来的趋势和行为。
在Matlab中,可以利用时间序列分析和神经网络等方法进行预测建模。
时间序列分析是一种用于预测未来数值的统计方法,广泛应用于经济学、金融学和气象学等领域。
在Matlab中,时间序列分析主要通过自回归(AR)模型和移动平均(MA)模型来实现。
Matlab中的系统辨识与模型预测控制技术引言Matlab是一种广泛应用于工程和科学领域的高级计算环境和编程语言。
它提供了丰富的工具箱和函数,使工程师和科学家能够进行数据分析、模拟和建模。
本文将探讨Matlab中的系统辨识与模型预测控制(Model Predictive Control, MPC)技术,并介绍其基本原理、应用和优势。
一、系统辨识的基本原理系统辨识是指通过对系统输入和输出数据的分析和处理,来获得对系统动态行为的理解和描述的过程。
在Matlab中,系统辨识工具箱提供了一系列方法和算法来实现系统辨识,其中最常用的方法是基于数据的系统辨识方法。
这些方法根据系统输入和输出的数据样本,通过参数估计和模型拟合来获取系统模型。
在系统辨识中,常用的模型包括线性模型、非线性模型和时变模型等。
线性模型是最简单和最常用的模型类型,它假设系统的行为是线性的,具有参数可调整的特点。
非线性模型考虑了系统的非线性特性,能更准确地描述系统的行为,但参数估计和模型拟合的复杂性也相应增加。
时变模型是指系统参数会随时间变化的模型,能更好地描述实际系统动态行为的变化。
在Matlab中,可以使用系统辨识工具箱中的命令和函数来进行参数估计和模型拟合。
通过对实际系统的输入和输出数据进行采样和记录,然后使用这些数据来拟合和评估系统模型,可以有效地了解和预测系统的行为。
这些模型可以用于系统控制的设计和优化,为工程师和科学家提供决策支持和指导。
二、模型预测控制的基本原理模型预测控制是一种先进的控制技术,它通过预测系统的未来行为来生成控制策略,并根据实际系统的反馈信息进行修正和优化。
在Matlab中,模型预测控制工具箱提供了一系列函数和工具,使工程师和科学家能够轻松地设计和实现模型预测控制算法。
模型预测控制的基本原理是通过建立一个系统模型来预测系统未来的行为,并根据这些预测结果生成相应的控制策略。
通常,系统模型可以使用系统辨识技术获得,也可以采用已知的数学模型。
利用Matlab进行模型预测控制算法实现引言:在现代控制领域,模型预测控制(Model Predictive Control,MPC)算法是一种非常重要的控制方法,其适用于多种工艺过程和系统控制。
本文将重点介绍如何利用Matlab实现模型预测控制算法。
第一部分:MPC算法简介模型预测控制算法是一种根据系统的数学模型进行控制的方法。
它不仅可以考虑系统的当前状态,还可以预测未来一段时间的状态,并优化控制器的输入,从而实现更好的控制效果。
MPC算法主要包括三个步骤:建模、预测和优化。
第二部分:MPC算法的建模在建立MPC控制模型之前,首先需要对控制对象进行数学建模。
一般来说,可以使用传统的物理建模方法或者数据驱动的建模方法。
在Matlab中,可以利用系统辨识工具箱或者曲线拟合工具箱等功能进行模型建立。
建模的目的是获取系统的状态方程和输出方程,用于后续的预测和优化。
第三部分:MPC算法的预测预测是MPC算法的核心步骤,它通过对系统的当前状态进行预测,得到未来一段时间内的状态和输出。
在Matlab中,可以利用预测模型对未来状态和输出进行计算,并得到一个预测轨迹。
预测模型可以在建模过程中得到,也可以根据实时数据进行在线更新。
第四部分:MPC算法的优化在预测的基础上,MPC算法通过优化控制器的输入信号,使得系统的输出符合预期的性能指标。
这个优化问题一般可以表示为一个多目标优化或者约束优化的问题。
在Matlab中,可以使用优化工具箱中的函数进行优化操作。
通过迭代计算,可以得到最优控制输入信号,从而实现更好的控制效果。
第五部分:MPC算法的实现在Matlab中,可以利用Control System Toolbox和Optimization Toolbox等工具箱来实现MPC算法。
首先,需要将系统的数学模型导入Matlab环境,并进行参数设置。
然后,可以使用MPC对象进行建模、预测和优化等操作。
最后,将MPC控制器与实际的控制系统进行连接,实现闭环控制。
使用隐马尔可夫模型进行预测的matlab代码一、概述隐马尔可夫模型(Hidden Markov Model,HMM)是一种统计模型,被广泛应用于语音识别、自然语言处理、生物信息学等领域。
它是一种具有隐含状态的动态贝叶斯网络模型。
在本文中,我们将介绍如何使用Matlab编写隐马尔可夫模型进行预测的代码。
二、隐马尔可夫模型的基本原理1. 隐马尔可夫模型由状态空间、观测空间、状态转移概率矩阵、观测概率矩阵和初始状态概率向量组成。
2. 隐马尔可夫模型假设系统的状态是隐藏的,并且通过对系统的观测来推断状态的变化。
3. 隐马尔可夫模型可以用来描述观测序列与状态序列之间的关系,以及根据观测序列推断状态序列的概率分布。
三、Matlab编写隐马尔可夫模型的预测代码以下是使用Matlab编写的隐马尔可夫模型进行预测的代码:```matlab1. 定义隐马尔可夫模型的参数states = {'sunny', 'cloudy', 'r本人ny'}; 定义状态空间obser = {'umbrella', 'no umbrella'}; 定义观测空间transMatrix = [0.8, 0.1, 0.1; 0.3, 0.4, 0.3; 0.2, 0.2, 0.6]; 定义状态转移概率矩阵emissMatrix = [0.2, 0.8; 0.7, 0.3; 0.6, 0.4]; 定义观测概率矩阵initProb = [0.2, 0.4, 0.4]; 定义初始状态概率向量2. 使用HMM的工具箱创建隐马尔可夫模型对象hmmModel = hmmCreate('States', states, 'Symbols', obser,'Transitions', transMatrix, 'Emissions', emissMatrix,'InitialProbabilities', initProb);3. 定义观测序列observations = [2, 1, 2]; 观测序列对应的索引4. 使用隐马尔可夫模型进行预测[path, logP] = hmmViterbi(hmmModel, observations);disp(path);disp(logP);```四、代码解释1. 在上述代码中,我们首先定义了隐马尔可夫模型的参数,包括状态空间、观测空间、状态转移概率矩阵、观测概率矩阵和初始状态概率向量。