多旋翼无人机 电机参数
- 格式:doc
- 大小:36.70 KB
- 文档页数:2

100kg载荷多旋翼参数1 前言一套完整的共轴双旋翼无人直升机系统一般有7个系统组成,包括:直升机平台,飞控系统,动力系统,舵机系统,数据链系统,地面站系统,载荷系统。
本文主要是针对共轴双旋翼无人直升机平台的构造及设计进行了简要的阐述。
2 概述“共轴双旋翼无人直升机具有绕同一理论轴线一正一反旋转的上下两副旋翼,由于转向相反,两副旋翼产生的扭矩在航向不变的飞行状态下相互平衡,通过所谓的上下旋翼总距差动产生不平衡扭矩可实现航向操纵,共轴双旋翼在直升机的飞行中,既是升力面又是纵横向和航向的操纵面。
”图1 共轴双旋翼无人直升机3 共轴双旋翼无人直升机总体设计3.1 主要参数分析与选择共轴双旋翼无人直升机平台的主要参数是总体方案的设计变量,它对直升机的性能有着决定性的影响。
因此,在直升机平台总体设计的初始阶段就要严密地进行参数选择,直升机平台总体设计参数关系到平台的飞行性能,飞行品质,气动,结构等参数。
是属于顶层设计。
对平台关键性指标起着决定性作用,同时也需要结合底层细节设计的数据相互验证,反复迭代。
直升机平台的主要参数包括,直升机总重,桨盘载荷,功率载荷,旋翼实度,和桨尖速度等。
3.1.1桨盘载荷的选择及方法桨盘载荷的定义:旋翼的拉力与旋翼桨盘面积之比。
式中,p 表示桨盘载荷,G表示直升机重量,R表示旋翼半径。
p=G/(πR²)桨盘载荷应在保证直升机平台所要求的有效载荷及性能的前提下,使直升机平台的有效载荷在总重中所占比例最大。
在具体设计时,参考与所设计直升机相近的现有直升机平台的统计数据,根据设计的具体情况来确定,一般可以遵循以下的原则:1.直升机总重量越大,桨盘载荷也应选得越大,一方面,总重较大时,往往选取更大的能获得较高的有效载荷,另一方面,对于总重较大的直升机。
如果p选得不够大,旋翼直径就会过大,在总体布置,使用等方面将引起相应问题。
2.采用涡轮轴发动机时,桨盘载荷可以选得大一些。
这样也可以获得较大的有效载荷。

无人机,也称无人飞行器,英文Unmannedaerial vehicle(UAV)无人飞行器是一种配置了数据处理系统、传感器、自动控制系统和通讯系统等必要机载设备的飞行器。
无人机技术是一项设计多个技术领域的综合系统,它对通讯技术、传感器技术、人工智能技术、图像处理技术模式识别技术、现代控制理论都有较深的运用和较高的要求。
无人飞行器与它所配套的地面站测控系统、存储、托运、发射、回收、信息处理等维护保障部分一起形成了一套完整的系统,同城无人飞行器系统Unmannedaerial system(UAS)1.1无人机的种类固定翼无人飞行器采用电动或者燃料发动机产生向前拉力或推力,飞行器依靠固定翼的翼形上下边产生的大气动压强差产生的升力维持飞行器的控制。
无人飞艇采用充气囊结构作为飞行器的升力来源,充气囊一般充有比空气目的小的氢气或氦气。
旋翼无人飞行器,其配备有多个朝正上方安装的螺旋桨,由螺旋桨的动力系统产生向下的气流,并对飞行器产生升力。
扑翼无人飞行器是基于仿生学原理,配合活动机翼能否模拟飞鸟的翅膀上下扑动的动作而产生升力和向前的推力。
伞翼无人飞行器采用伞型机翼作为飞行器升力的主要来源。
1.2无人机的分类与管理在中国无人机驾驶航空器体系中,按照无人机的基本起飞重量指标可以分为四个等级1. 微型无人机,空机质量小于等于7千克2. 轻型无人机,空机质量大于7千克,但小于等于116千克,并且全马力飞行中,矫正空速度100公里/小时,升限小鱼3000米3. 小型无人机,空机质量小于等于5700千克,除微型及小型无人机以外的其他无人机4. 大型无人机,空机质量大于5700千克的无人机中国的空域目前归属于军队管理,民用航空领域则由民航总局向军队申请划分空域及航道。
民航总局针对私人飞行器的管理专设“中国航空器拥有者及驾驶员协会AircraftOwners and Pilots Association Of China - AOPA”,中国民航领域对飞行器主要管理分为三个层次等级进行管理。

名词解释多旋翼无人机的KV值多旋翼无人机的KV值是指电动机旋转的速度和推力之间的比例关系。
KV值是无人机行业中常用的一个术语,它会直接影响无人机的性能表现和飞行特性。
在选择和组装无人机时,了解和理解KV值的含义和作用非常重要。
KV值的含义KV值是电动机的一个特性参数,表示电动机每分钟旋转的圈数。
具体来说,KV值等于电动机在理论条件下,不带任何负载和电压的情况下,每分钟转过的圈数。
例如,一个KV值为1000的电动机,意味着当给电机施加1伏特电压时,它每分钟会旋转1000圈。
KV值可以帮助我们估计电动机的推力输出,以及帮助选择合适的电机和螺旋桨组合。
KV值的影响KV值对无人机的性能有着直接的影响。
一般来说,较高KV值的电动机通常具有较高的转速和较小的扭矩。
它们适用于小尺寸、轻负荷的无人机,如迷你四轴飞行器或者FPV竞速无人机。
这些无人机需要快速的响应和灵敏的操控。
相反,较低KV值的电动机通常具有较低的转速和较大的扭矩。
它们适用于大尺寸、重负荷的无人机,如航拍无人机或多旋翼无人机。
这些无人机需要稳定的飞行、较长的续航时间和携带重量。
选择适合的KV值在选择无人机电动机时,需要根据具体应用场景和需求来确定合适的KV值。
如果你计划制作一架竞速无人机,较高的KV值电机可能会给你带来更高的速度和敏捷性。
而如果你希望拍摄具有良好稳定性和航拍能力的视频,较低KV值的电机可能更适合。
此外,选择适合的KV值还需要考虑其他因素,例如电池电压、螺旋桨尺寸和机架设计等。
理论上,较高的电压可以提供更高的推力输出,但也会增加能量消耗和电机的热量。
因此,在选择电动机时,需要综合考虑电池选型和供电系统的稳定性。
同样重要的是,螺旋桨的尺寸和设计也会影响无人机的飞行性能。
通常来说,较大的螺旋桨能够提供更多的升力,但也会增加电动机的负载和功耗。
因此,在选择螺旋桨和电动机时,需要注意它们之间的匹配关系。
总结KV值作为电动机的重要参数,对无人机的性能表现和飞行特性有着直接的影响。
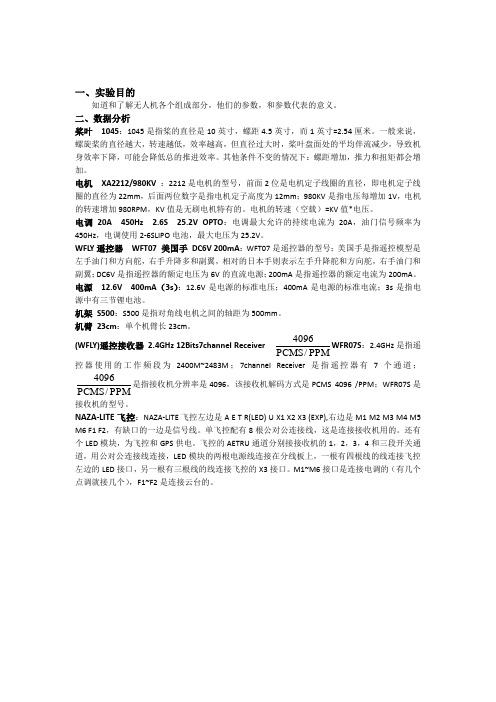
一、实验目的知道和了解无人机各个组成部分,他们的参数,和参数代表的意义。
二、数据分析桨叶 1045:1045是指桨的直径是10英寸,螺距4.5英寸,而1英寸=2.54厘米。
一般来说,螺旋桨的直径越大,转速越低,效率越高,但直径过大时,桨叶盘面处的平均伴流减少,导致机身效率下降,可能会降低总的推进效率。
其他条件不变的情况下:螺距增加,推力和扭矩都会增加。
电机 XA2212/980KV :2212是电机的型号,前面2位是电机定子线圈的直径,即电机定子线圈的直径为22mm ,后面两位数字是指电机定子高度为12mm ;980KV 是指电压每增加1V ,电机的转速增加980RPM ,KV 值是无刷电机特有的。
电机的转速(空载)=KV 值*电压。
电调 20A 450Hz 2.6S 25.2V OPTO :电调最大允许的持续电流为20A ,油门信号频率为450Hz ,电调使用2-6SLIPO 电池,最大电压为25.2V 。
WFLY 遥控器 WFT07 美国手 DC6V 200mA :WFT07是遥控器的型号;美国手是指遥控模型是左手油门和方向舵,右手升降多和副翼,相对的日本手则表示左手升降舵和方向舵,右手油门和副翼;DC6V 是指遥控器的额定电压为6V 的直流电源;200mA 是指遥控器的额定电流为200mA 。
电源 12.6V 400mA (3s ):12.6V 是电源的标准电压;400mA 是电源的标准电流;3s 是指电源中有三节锂电池。
机架 S500:S500是指对角线电机之间的轴距为500mm 。
机臂 23cm :单个机臂长23cm 。
(WFLY)遥控接收器 2.4GHz 12Bits7channel Receiver PPM/PCMS 4096WFR07S :2.4GHz 是指遥控器使用的工作频段为2400M~2483M ;7channel Receiver 是指遥控器有7个通道;PPM/PCMS 4096是指接收机分辨率是4096,该接收机解码方式是PCMS 4096 /PPM ;WFR07S 是接收机的型号。

多旋翼无人机动力系统各器件的功能多旋翼无人机动力系统是无人机的核心部分,由多个器件组成,各具不同功能。
下面将分别介绍多旋翼无人机动力系统中各个器件的功能。
1. 电机(Motor)电机是多旋翼无人机动力系统的关键组件之一,主要负责提供动力。
电机通过转动螺旋桨产生的推力,使无人机能够在空中飞行。
根据无人机的大小和载重要求,电机的功率和转速可以有所不同。
2. 螺旋桨(Propeller)螺旋桨是将电机的动力转化为推力的装置。
它通过旋转产生气流,从而推动无人机向前飞行或保持平衡。
螺旋桨的形状和材料也会影响无人机的性能和稳定性。
3. 电调(Electronic Speed Controller,ESC)电调是无人机动力系统中的控制装置,用于调节电机的转速和功率。
通过接收飞控系统发送的指令,电调可以控制电机的转速,从而控制无人机的飞行姿态和速度。
4. 电池(Battery)电池是无人机动力系统的能量来源,提供给电机和其他电子设备所需的电能。
电池的容量和电压决定了无人机的续航能力和飞行时间。
不同类型的电池(如锂电池、聚合物电池等)具有不同的特性和适用场景。
5. 电源管理系统(Power Distribution Board,PDB)电源管理系统用于管理和分配电能,将电池的电能供给给各个部件。
它通常包括电源输入接口、分配电路和电源输出接口等。
通过电源管理系统,可以确保各个部件能够正常工作,并提供电流和电压保护功能。
6. 电源滤波器(Power Filter)电源滤波器用于过滤电源中的干扰和噪音,保证无人机系统能够正常运行。
它可以减少电源波动对其他电子设备的影响,并提高系统的稳定性和可靠性。
7. 传感器(Sensors)传感器在无人机动力系统中起到感知和监测的作用。
常见的传感器包括加速度计、陀螺仪、罗盘等。
它们可以测量无人机的姿态、速度、方向等参数,并将这些信息传输给飞控系统,从而实现无人机的自动控制和稳定飞行。

四旋翼无人机电机推力计算一、引言随着无人机技术的发展,四旋翼无人机因其稳定性和操控性受到了广泛关注。
在无人机设计中,电机推力的计算是一项重要任务。
本文将详细介绍四旋翼无人机电机推力的计算方法以及在实际应用中的重要性。
二、四旋翼无人机电机推力计算公式1.基本公式电机推力F与电机功率P、转速n和螺旋桨的拉力T之间的关系可以用以下公式表示:F = P / (2πn * T)其中,P为电机功率(单位:瓦特),n为电机转速(单位:转/分钟),T 为螺旋桨拉力(单位:牛顿)。
2.修正公式实际应用中,还需要考虑空气密度、飞行速度等因素。
修正后的公式为:F = P / (2πn * T * ρ * A / V)其中,ρ为空气密度(单位:千克/立方米),A为螺旋桨面积(单位:平方米),V为飞行速度(单位:米/秒)。
3.实例计算假设一台四旋翼无人机,电机功率为500W,转速为20000转/分钟,螺旋桨拉力为2N,空气密度为1.2千克/立方米,飞行速度为10米/秒,螺旋桨面积为0.05平方米。
代入公式,得到:F = 500 / (2π * 20000 * 2 * 1.2 * 0.05 / 10) ≈ 1.67N三、影响电机推力的因素1.电机参数:包括电机的功率、转速等,直接影响推力大小。
2.旋翼参数:如旋翼的拉力、面积等,与电机推力成正比。
3.空气密度:影响无人机所受的升力,从而影响电机推力。
4.飞行速度:飞行速度越快,所需的电机推力越大。
四、电机推力计算在无人机设计中的应用在无人机设计中,电机推力的计算有助于选择合适的电机和旋翼,确保无人机具有良好的飞行性能。
同时,根据实际飞行需求,可以调整电机参数、旋翼参数等,以达到最佳飞行效果。
五、结论四旋翼无人机电机推力的计算对于无人机设计具有重要意义。
通过掌握计算方法和影响因素,可以更好地选择和使用无人机电机,提高无人机性能。
HC 蜂巢航宇科技(北京)有限公司山东蜂巢航空科技有限公司H C/P D022501-2019 HC-332H油电混合六旋翼无人机技术规格书联系电话:010-836866102019年02月25日产品部整理发布版本版本修改日期责任人说明V1.02019.02.25温小青系统编写HC-332技术规格书V1.12019.05.14尤冰冰修改HC-332技术规格书V1.32019.09.03勾柯楠添加了无机臂尺寸,更换了地面站及CAM-M30产品图片V1.42020.05.18陈晨更新了任务设备系统V1.52020.09.10陈晨将遥控器更换为思翼遥控器V1.62020.12.21陈晨将发动机更换为GX-2发动机V1.72021.03.12修改部分参数问题汇签编制人:编制日期:审核人:审核日期:批准人:批准日期:目录1主题内容和适用范围 (1)2HC-332六旋翼无人机系统概述 (1)2.1系统特点 (1)2.2典型应用领域 (2)3系统组成 (2)4分系统设备技术指标及说明 (3)4.1飞行平台 (3)4.2动力装置 (6)4.3电气系统 (8)4.4飞行控制系统 (8)4.5任务设备系统(选配) (9)4.5.1HHOP-V4倾斜摄影立体测绘相机 (9)4.5.2Q10TIR-35(10倍双光跟踪吊舱) (11)4.5.3Q30TIR(30倍双光跟踪吊舱) (13)4.5.4Q30T Pro(30倍跟踪吊舱) (17)4.5.5Q30TM(30倍跟踪激光测距吊舱) (19)4.5.6Z5S微单一体机云台 (20)4.6通讯与数据链系统 (22)4.6.1DL-10图数一体链路(电动巡检版标配) (22)4.6.2DL-30图数一体链路(混动巡检版标配) (24)4.6.3DT-6数传电台(测绘版标配) (25)4.7地面控制站及地面保障设备 (26)4.7.1遥控器 (26)4.7.2笔记本地面站(航测版标配) (28)4.7.3GCS-D01双屏移动式地面站(巡检版标配).294.7.4集成便携箱 (30)4.7.5备品备件 (31)4.8使用保管环境条件 (31)4.9系统典型使用过程 (31)4.10保障和服务 (32)4.10.1现场保障 (32)4.10.2基地保障 (33)4.11售后服务 (33)4.12培训和资料 (33)4.13系统配置清单 (34)1主题内容和适用范围本技术规格书规定了HC-332无人机系统的技术状态、技术指标和检验验收方法,作为订货方和供货方签订合同、进行验收交付时的技术状态依据。
多旋翼无人机电机参数
多旋翼无人机的电机参数主要包括以下几项:
1. 最大拉力:表示电机能够产生的最大拉力,单位是千克或牛顿。
这对于决定无人机的负载能力十分关键。
2. 电压:这是电机的额定电压,决定了电机的功率和使用效率。
3. 电流:表示电机在运行时通过的电流大小。
电流的大小直接影响电机的功率和效率。
4. 转速:表示电机的最高转速,单位是转每分钟(rpm)。
转速决定了无人机的飞行速度和效率。
5. 尺寸:表示电机的尺寸大小,通常以直径和高度表示。
尺寸大小会影响无人机的整体结构和性能。
6. 重量:表示电机的重量,单位是克或千克。
重量会影响无人机的整体性能和机动性。
7. 温度:表示电机的工作温度范围,一般以摄氏度或华氏度表示。
温度会影响电机的效率和寿命。
8. 功率:表示电机的额定功率,单位是瓦特或千瓦。
功率决定了电机的负载能力和飞行效率。
9. 效率:表示电机的工作效率,通常以百分比表示。
效率越高,电机的性能越好。
10. 工作环境:表示电机可以在什么样的环境下工作,如温度、湿度、气压等。
11. 材料:表示电机的材料,如铝、铜、铁、钢等。
不同的材料会影响电机
的性能和寿命。
12. 寿命:表示电机的使用寿命,通常以小时或飞行次数来表示。
这些参数共同决定了多旋翼无人机的性能和表现,所以在选择无人机电机时,需要根据实际需求来选择适合的电机型号和规格。