浅谈数字图像处理及文字轮廓提取
- 格式:pdf
- 大小:634.55 KB
- 文档页数:2
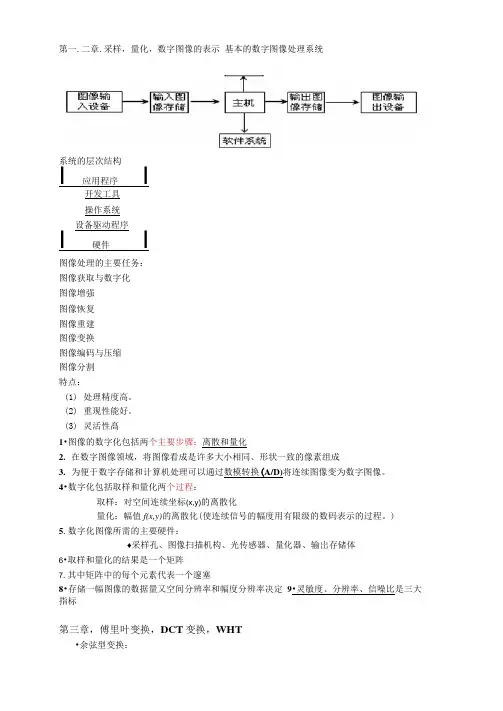
第一.二章.采样,量化,数字图像的表示 基本的数字图像处理系统系统的层次结构I 应用程序 I 开发工具 操作系统 设备驱动程序I硬件I图像处理的主要任务: 图像获取与数字化 图像增强 图像恢复 图像重建 图像变换 图像编码与压缩 图像分割 特点:(1) 处理精度高。
(2) 重现性能好。
(3) 灵活性髙1•图像的数字化包括两个主要步骤:离散和量化2. 在数字图像领域,将图像看成是许多大小相同、形状一致的像素组成3. 为便于数字存储和计算机处理可以通过数模转换(A/D)将连续图像变为数字图像。
4•数字化包括取样和量化两个过程:取样:对空间连续坐标(x,y)的离散化量化:幅值f(x,y)的离散化(使连续信号的幅度用有限级的数码表示的过程。
)5.数字化图像所需的主要硬件:♦采样孔、图像扫描机构、光传感器、量化器、输岀存储体6•取样和量化的结果是一个矩阵 7.其中矩阵中的每个元素代表一个邃塞8•存储一幅图像的数据量又空间分辨率和幅度分辨率决定 9•灵敏度、分辨率、信噪比是三大指标第三章,傅里叶变换,DCT变换,WHT•余弦型变换:•傅里叶变换(DFT)和余弦变换(DCT)O•方波型变换:•沃尔什•哈达玛变换(DWT)1•二维连续傅里叶正反变换:F(u,v)= I f f(x.y)eJ_oc J_ocf g y)= \f F(u, v)ej27r(nA+vv)dwdvJ —oo J —oo二维离散傅里叶变换:M — 1 N — I=乏疋 Fgg 宀SS)if=o v=O。
F(u, v)即为f (x, y)的频谱。
频谱的直流成分说明在频谱原点的傅里叶变换尸(0,0)等于图像的平均灰度级 卷积定理:/(x,y)*^(x, y)= ss /O, n)g(x 一 m, y~n)/?/=() n=02•二维离散余弦变换(DCT)一维离散余弦变换:EO)=%)岳gfg 芈严 其中 c®=怜 ""DCT 逆变换为F(u.v)=1~MN A =0 y=02 A r -1/(«)=咅 C(0) + \1三工 F (gsn(2n +1)« ~~2N3•—维沃尔什变换核g (W ):1 X_JL£(乂申)=丄口(一 1)®(”)為一】一心)<N i=o• 厂、Cn 7V--1 ^T-l码3》=卡吝 /G 〉耳(—1)635—一 3«JC> =牙中 O )n (—O务i二维:•正变换: 1 N —l. N —!■H —1护(“*) = —X X /X%」)口( — 1)4(5—373$一_W] N 宜 U • JO■逆变换二1 AT-l JV-l 片_]/(X.y )=丄 £ 乞 疗(心巧 口弟-i -心)JN 為 v=o ~。

基于计算机视觉测量技术的图像轮廓提取方法研究一、本文概述随着计算机视觉技术的快速发展,其在工业测量、医疗诊断、自动驾驶等众多领域的应用日益广泛。
图像轮廓提取作为计算机视觉中的一项关键技术,对于实现目标的识别、定位、跟踪等任务具有重要意义。
本文旨在研究基于计算机视觉测量技术的图像轮廓提取方法,以提高轮廓提取的准确性和效率。
本文将回顾传统的图像轮廓提取方法,如边缘检测算子、阈值分割等,并分析其优缺点。
在此基础上,本文将探讨基于现代计算机视觉测量技术的轮廓提取方法,如基于深度学习的轮廓检测算法、基于结构光的三维轮廓测量技术等。
这些新方法在轮廓提取的准确性和鲁棒性方面具有显著优势,能够更好地适应复杂多变的实际应用场景。
本文将详细介绍所研究的图像轮廓提取方法的具体实现过程,包括预处理、特征提取、轮廓检测等步骤。
本文将通过实验验证所提出方法的有效性,并与传统方法进行比较,以展示其在实际应用中的优势。
本文还将探讨基于计算机视觉测量技术的图像轮廓提取方法在未来可能的发展方向和挑战。
随着深度学习、三维重建等技术的不断进步,轮廓提取方法将在更多领域发挥重要作用,为实现更智能、更高效的图像处理和分析提供有力支持。
二、图像轮廓提取基础理论图像轮廓提取是计算机视觉测量技术中的关键步骤,其目标是识别并描绘出图像中物体的边缘或边界。
这些轮廓信息对于理解图像内容、进行物体识别、三维重建等任务至关重要。
图像轮廓提取主要基于边缘检测算法和轮廓跟踪算法。
边缘检测算法是轮廓提取的基础,它通过对图像中像素强度的突变进行检测,从而找到边缘位置。
经典的边缘检测算子包括Sobel、Prewitt、Roberts、Canny等。
这些算子通过计算图像在水平和垂直方向上的梯度强度,来判定像素是否属于边缘。
其中,Canny算子以其良好的噪声抑制能力和边缘定位精度,在实际应用中得到了广泛应用。
轮廓跟踪算法则是在边缘检测的基础上,通过连接相邻的边缘像素,形成连续的轮廓线。
边缘提取原理
边缘提取是数字图像处理中的一项基本操作,其目的是在图像中提取出物体的轮廓和边缘信息。
这些边缘信息对于图像分割、目标识别和形状分析等任务都具有重要的作用。
边缘提取的原理可以简单地概括为在图像中检测出像素值变化明显的位置。
在实际操作中,常用的方法包括基于梯度、基于拉普拉斯、基于Canny算子等。
其中,基于梯度的方法是最常用的一种。
它通过计算像素点周围灰度值变化率最大的方向来确定该点处边缘方向,并将其与周围像素进行比较以确定是否为边缘点。
常见的算法有Sobel算子、Prewitt算子和Roberts算子等。
另一种常用方法是基于拉普拉斯。
它通过计算二阶导数来检测出图像中灰度值变化明显的位置,从而确定边缘位置。
但该方法容易受到噪声干扰,因此需要先对图像进行平滑处理。
Canny算子则是一种综合了以上两种方法并加以改进的算法,其主要特点是准确性高、抗噪声能力强、边缘定位精度高等。
其具体实现步骤包括高斯滤波、计算梯度幅值和方向、非极大值抑制、双阈值处理
和边缘连接等。
总的来说,边缘提取是数字图像处理中的一个基本操作,其原理主要是通过检测像素值变化明显的位置来确定图像中的边缘信息。
常用的方法包括基于梯度、基于拉普拉斯和基于Canny算子等。
在实际应用中,需要根据具体情况选择合适的方法,并进行参数调整和优化,以获得更好的效果。
如何利用数字图像处理技术进行地物提取概述:数字图像处理技术是一种通过计算机对图像进行处理和分析的方法,可以帮助我们提取出图像中的目标地物。
地物提取在土地利用、环境研究、城市规划等领域中具有重要的意义。
本文将讨论如何利用数字图像处理技术进行地物提取。
一、图像预处理在进行地物提取之前,首先需要对原始图像进行预处理。
常用的预处理方法有直方图均衡化、噪声去除、边缘增强等。
直方图均衡化可以提高图像的对比度,使得地物的边界更加清晰。
噪声去除可以通过滤波器进行,如中值滤波器可以有效地去除椒盐噪声和高斯噪声。
边缘增强可以通过边缘检测算法实现,如Sobel算子、Canny算子等。
这些预处理方法可以帮助我们更好地进行地物提取。
二、色彩空间转换在进行地物提取时,常常需要将图像从RGB色彩空间转换到其他色彩空间,如灰度色彩空间或者HSV色彩空间。
灰度色彩空间只考虑图像的亮度信息,可以有效地提取出地物的形状。
HSV色彩空间将色彩信息和亮度信息分离开来,可以帮助我们更好地进行地物分类。
通过进行色彩空间的转换,可以提高地物提取的效果。
三、阈值分割阈值分割是一种常用的地物提取方法。
通过设定一个阈值,将图像中亮度大于该阈值的像素点划分为地物,亮度小于该阈值的像素点划分为背景。
阈值的选择对地物提取结果影响很大,通常需要利用试错法进行调整。
另外,为了进一步提高阈值分割的效果,可以采用自适应阈值分割算法,根据图像的局部特性自动确定阈值,使得地物提取更加准确。
四、边缘检测边缘检测是一种可以提取出图像中轮廓信息的方法,可以帮助我们更好地提取地物。
常用的边缘检测算法有Sobel算子、Canny算子等。
Sobel算子可以提取出图像中的水平边缘和垂直边缘,Canny算子可以提取出图像中具有一定强度的边缘。
边缘检测可以帮助我们确定地物的形状和位置,从而更好地进行地物提取。
五、形态学操作形态学操作是一种基于像素周围邻域的操作,可以帮助我们进一步提取地物。
本章重点:理解位图与矢量图的概念、特点及应用理解图像分辨率的概念能够根据后端输出的需要正确地设置图像分辨率了解Photoshop中常用的图像存储格式1.1 图像概念"图像”一词主要来自西方艺术史译著,通常指image、icon、picture和它们的衍生词,也指人对视觉感知的物质再现。
图像可以由光学设备获取,如照相机、镜子、望远镜、显微镜等;也可以人为创作,如手工绘画。
图像可以记录与保存在纸质媒介、胶片等对光信号敏感的介质上。
随着数字采集技术和信号处理理论的发展,越来越多的图像以数字形式存储。
因而,有些情况下,“图像”一词实际上是指数字图像,本书中主要探讨的也是数字图像的处理。
数字图像(或称数码图像)是指以数字方式存储的图像。
将图像在空间上离散,量化存储每一个离散位置的信息,这样就可以得到最简单的数字图像。
这种数字图像一般数据量很大,需要采用图像压缩技术以便能更有效地存储在数字介质上。
所谓“数字图像艺术”是指艺术与高科技结合,以数字化方式和概念所创作出的图像艺术。
它可分为两种类型:一种是运用计算机技术及科技概念进行设计创作,以表达属于数字时代价值观的图像艺术;另一种则是将传统形式的图像艺术作品以数字化的手法或工具表现出来。
Photoshop软件出现之后,数字图像艺术所特有的视觉表现语言逐步形成。
在学习应用Photoshop软件创建种种超越现实的、不可思议的新概念空间与视觉效果之前,必须先掌握Photoshop图像处理必备的一些基础概念。
在计算机中,图像是以数字方式来记录、处理和保存的,所以图像也可以称为数字化图像。
计算机图像分为位图(又称点阵图或栅格图像)和矢量图两大类,数字化图像类型分为向量式图像与点阵式图像。
1 .位图一般来说,经过扫描输入和图像软件处理的图像文件都属于位图,与矢量图形相比,位图的图像更容易模拟照片的真实效果。
位图的工作是基于方形像素点的,这些像素点像是“马赛克”,如果将这类图像放大到一定的程度时,就会看见构成整个图像的无数单个方块(图1-1),这些小方块就是图形中最小的构成元素一一像素点,因此,位图的大小和质量取决于图像中像素点的多少。

数字图像的特征提取.txt23让我们挥起沉重的铁锤吧!每一下都砸在最稚嫩的部位,当青春逝去,那些部位将生出厚晒太阳的茧,最终成为坚实的石,支撑起我们不再年轻但一定美丽的生命。
呵呵,看了半天,原来你只不过要求进行边缘检测就可以,然后再做阈值化而已,太简单了。
按照下面做即可:void RobelEdgeDetect(LPBYTE lpDibTemp, LPBYTE lpDibSave,int width,int height){int i,j;float R;float RCos,RSin;for(j=1;j <height-1;j++)for(i=1;i <width-1;i++){RCos=(float)(lpDibTemp[(j-1)*width+i+1]+2*lpDibTemp[j*width+i+1]+lpDibTemp[(j+1)*width+i+1]-lpDibTemp[(j-1)*width+i-1]-2*lpDibTemp[j*width+i-1]-lpDibTemp[(j+1)*width+i-1]);RSin=(float)(lpDibTemp[(j+1)*width+i-1]+2*lpDibTemp[(j+1)*width+i]+lpDibTemp[(j+ 1)*width+i+1]-lpDibTemp[(j-1)*width+i-1]-2*lpDibTemp[(j-1)*width+i]-lpDibTemp[(j-1)*width+i+1 ]);lpDibSave[j*width+i]=(unsigned char)(float)sqrt(RCos*RCos+RSin*RSin);for(i=0;i <width;i++)//边缘处理{lpDibTemp[width*(height-1)+i]=lpDibTemp[width*(height-2)+i];lpDibTemp[i]=lpDibTemp[256+i];}for(j=0;j <height;j++){lpDibTemp[width-1+width*j]=lpDibTemp[width*j+width-2];lpDibTemp[width*j]=lpDibTemp[width*(j+1)];}for(j=0;j <height;j++)for(i=0;i <width;i++){lpDibSave[j*width+i]=255-lpDibSave[j*width+i];//反色if(lpDibSave[j*width+i]> =128) //阈值化lpDibSave[j*width+i]=255;elselpDibSave[j*width+i]=0;}}ok,一切完成!!!其中,阈值化时,要跟你的图像具体情况而定,当然可以使用自适应阈值最好了。
数字图像处理名词解释数字图像是由像素组成的二维矩阵,每个小块区域称为像素(pixel)。
数字图像处理是指利用数字计算机及其它数字技术,对图像进行某种运算和处理,从而达到某种预期目的的技术。
8-连通是指对于具有值V的像素p和q,如果q在集合N8(p)中,则称这两个像素是8-连通的。
灰度直方图反映了一幅图像中各灰度级像元出现的频率,是灰度级的函数,描述的是图像中该灰度级的像素个数。
直方图只反映该图像中不同灰度值出现的次数,而未反映某一灰度值像素所在位置。
直方图可用于判断图像量化是否恰当,给出了一个简单可见的指示,用来判断一幅图象是否合理的利用了全部被允许的灰度级范围。
数字图像通常有两种表示形式:位图和矢量图。
点位图由像素构成,包含不同色彩信息的像素的矩阵组合构成了千变万化的图像。
矢量图形指由代数方程定义的线条或曲线构成的图形,由许多矢量图形元素构成,这些图形元素称为“对象”。
两种图像的构成方式不同,其绘画方式也存在差别。
点位图是通过改变像素的色彩实现绘画和画面的修改,而矢量图操纵的是基本的图形(对象)。
在矢量图中,以Corel Draw为例,选择贝赛尔曲线工具,用鼠标在页面上定出一些节点,节点之间有线段,构成一个封闭图形。
用修改工具把这个图形调整圆滑。
傅里叶变换是一种将空间域中复杂的卷积运算转化为频率域中简单的乘积运算的方法,其应用主要有以下三方面:简化计算、处理空间域中难以处理或处理起来比较复杂的问题、以及实现特殊目的的应用需求。
通过傅里叶变换,可以将图像从空间域变换到频率域,利用频率域滤波或频域分析方法对其进行处理和分析,然后再将处理后的图像变换回空间域,从而实现图像的增强、特征提取、数据压缩、纹理分析、水印嵌入等效果。
对于M*N的图像f(x,y),其基矩阵的大小为M*N,也即及图像由M*N块组成。
当(x,y)取遍所有可能的值(x=0,1,2….m-1;y=0,1…n-1)时,就可得到由(M*N)*(M*N)块组成的基图像,所以其基图像大小为M平方*N平方。
数字图像处理实验报告目录1.数字图像处理简介2.实验目的3.实验内容4.实验结果及代码展示5.算法综述6.M atlab优势7.总结8.存在问题一、数字图像处理简介图像处理,是对图像进行分析、加工、和处理,使其满足视觉、心理以及其他要求的技术。
图像处理是信号处理在图像域上的一个应用。
目前大多数的图像是以数字形式存储,因而图像处理很多情况下指数字图像处理。
此外,基于光学理论的处理方法依然占有重要的地位。
图像处理是信号处理的子类,另外与计算机科学、人工智能等领域也有密切的关系。
传统的一维信号处理的方法和概念很多仍然可以直接应用在图像处理上,比如降噪、量化等。
然而,图像属于二维信号,和一维信号相比,它有自己特殊的一面,处理的方式和角度也有所不同。
二、实验目的巩固所学知识,提高所学能力三、实验内容利用matlab的GUI程序设计一个简单的图像处理程序,并含有如下基本功能:1. 读入一幅RGB图像,变换为灰度图像和二值图像,并在同一个窗口内分成三个子窗口来分别显示RGB图像和灰度图像,注上文字标题2. 对给定图像进行旋转3.对给定的图像添加噪声(椒盐噪声、高斯噪声)四、实验结果及代码展示1.软件设计界面2.各模块功能展示以及程序代码(1)读入一幅RGB图像,变换为灰度图像和二值图像,并在同一个窗口内分成三个子窗口来分别显示RGB图像和灰度图像,注上文字标题效果展示:代码:a = imread('C:\Documents and Settings\Administrator\桌面\数字图像\舞美.JPG');i = rgb2gray(a);I = im2bw(a,0.5);subplot(3,1,1);imshow(a);title('源图像')subplot(3,1,2);imshow(i);title('灰度图像')subplot(3,1,3);imshow(I);title('二值图像')(2)图像旋转原图效果展示:代码:clc;clear all;close all;Img=imread('D:\My Documents\My Pictures\5.JPG'); Img=double(Img);[h w]=size(Img);alpha=pi/4;wnew=w*cos(alpha)+h*sin(alpha);hnew=w*sin(alpha)+h*cos(alpha);wnew=ceil(wnew);hnew=ceil(hnew); u0=w*sin(alpha);T=[cos(alpha),sin(alpha);-sin(alpha),cos(alpha)]; Imgnew2=zeros(hnew,wnew);Imgnew1=zeros(hnew,wnew); for u=1:hnewfor v=1:wnewtem=T*([u;v]-[u0;0]);x=tem(1);y=tem(2);if x>=1&&x<=h&&y>=1&&y<=wx_low=floor(x);x_up=ceil(x);y_low=floor(y);y_up=ceil(y);if (x-x_low)<=(x_up-x)x=x_low;elsex=x_up;endif (y-y_low)<=(y_up-y)y=y_low;elsey=y_up;endp1=Img(x_low,y_low);p2=Img(x_up,y_low);p3=Img(x_low,y_low);p4=Img(x_up,y_up);s=x-x_low;t=y-y_low;Imgnew1(u,v)=Img(x,y);Imgnew2(u,v)=(1-s)*(1-t)*p1+(1-s)*t*p3+(1-t)*s*p2+s*t*p4;endendendfigure;imshow(Imgnew2,[]);B=imrotate(Img,alpha/pi*180);figure;imshow(B,[]);(3)对给定的图像添加噪声(斑点噪声、高斯噪声)效果展示:代码:I= imread('D:\My Documents\My Pictures\5.JPG');figure,subplot(211);imshow(I);title('原图');J1=imnoise(I,'gaussian',0,0.02);subplot(223);imshow(J);title('添加高斯噪声');J=imnoise(I,'speckle',0.04);subplot(224);imshow(J);title('添加斑点噪声');五、算法综述灰度图像:一幅完整的图像,是由红色、绿色、蓝色三个通道组成的。
图像处理技术及其应用摘要:数字图像处理是指将图像信号转换成数字信号并利用计算机对其进行处理的过程。
在当今,数字图像处理正与当今社会的各个方面紧紧相连,密不可分。
本文针对其发展应用进行了系统的论述。
关键字:数字图像处理;计算机技术;检测;应用引言计算机图像处理技术是在20世纪80年代后期,随着计算机技术的发展应运而生的一门综合技术。
图像处理就是利用计算机、摄像机及其它有关数字技术,对图像施加某种运算和处理,使图像更加清晰,以提取某些特定的信息,从而达到特定目的的技术。
随着多媒体技术和网络技术的快速发展,数字图像处理已经广泛应用到了人类社会生活的各个方面,如:遥感,工业检测,医学,气象,通信,侦查,智能机器人等。
无论在哪个领域中,人们喜欢采用图像的方式来描述和表达事物的特性与逻辑关系,因此,数字图像处理技术的发展及对其的要求就越来显得重要。
1数字图像处理技术概述及发展20世纪20年代,图像处理首次应用于改善伦敦和纽约之间海底电缆发送的图片质量。
到20世纪50年代,数字计算机发展到一定的水平后,数字图像处理才真正引起人们的兴趣。
1964年美国喷气推进实验室用计算机对“徘徊者七号”太空船发回的大批月球照片进行处理,收到明显的效果。
20世纪60年代末,数字图像处理具备了比较完整的体系,形成了一门新兴的学科。
20世纪70年代,数字图像处理技术得到迅猛的发展。
理论和方法进一步完善,应用范围更加广泛。
在这一时期,图像处理主要和模式识别及图像理解系统的研究相联系,如文字识别、医学图像处理、遥感图像的处理等。
20世纪70年代后期到现在,各个应用领域对数字图像处理提出越来越高的要求.促进了这门学科向更高级的方向发展。
特别是在景物理解和计算机视觉(即机器视觉)方面,图像处理已由二维处理发展到三维理解或解释。
近年来,随着计算机和其它各有关领域的迅速发展,例如在图像表现、科学计算可视化、多媒体计算技术等方面的发展,数字图像处理已从一个专门的研究领域变成了科学研究和人机界面中的一种普遍应用的工具。
数字图像处理技术及处理过程2019-05-24图像是⼀种信息。
所谓图像处理,就是对图像信息进⾏加⼯以满⾜⼈的视觉⼼理和应⽤需求的⾏为。
数字图像处理是指利⽤计算机或其他数字设备对图像信息进⾏各种加⼯和处理。
它是⼀门新兴的应⽤学科,其发展速度异常迅速,应⽤领域极为⼴泛。
数字图像处理的早期应⽤是对宇宙飞船发回的图像所进⾏的各种处理。
到70年代,图像处理技术的应⽤迅速从宇航领域扩展到⽣物医学、信息科学、资源环境科学、天⽂学、物理学、⼯业、农业、、教育、艺术等各个领域与⾏业,对经济、军事、⽂化及⼈们的⽇常⽣活产⽣重⼤的影响。
数字图像处理技术发展速度快、应⽤范围⼴的主要原因有两个。
由于数字图像处理的数据量⾮常庞⼤,处理速度相对较慢,这就限制了数字图像处理的发展,因此计算机的计算能⼒迅速提⾼,运⾏速度⼤⼤提⾼是⼀个原因。
另外计算机价格迅速下降,图像处理设备从中、⼩型计算机迅速过渡到个⼈计算机,为图像处理在各个领域的应⽤准备了条件。
第⼆个原因是由于视觉是⼈类感知外部世界最重要的⼿段,据统计,在⼈类获取的信息中,视觉信息60%,⽽图像正是⼈类获取信息的主要途径,因此,和视觉紧密相关的数字图像处理技术的潜在应⽤范围⾃然⼗分⼴阔。
图像处理技术基本可以分成两⼤类:模拟图像处理(Analog Image Processing)和数字图像处理(Digital Image Processing)。
数字图像处理,通俗地讲就是利⽤计算机对图像进⾏处理。
因此也称之为计算机图像处理(Computer Image Processing)。
其优点是处理精度⾼,处理内容丰富,可进⾏复杂的⾮线性处理,有灵活的变通能⼒,⼀般来说只要改变软件就可以改变处理内容。
存在的问题主要在于处理速度,特别是进⾏复杂的处理更是如此。
数字图像处理概括地说主要包括如下⼏项内容:⼏何处理( Geomet rical Processing)、算术处理(Arithmetic Processing)、图像增强( Image Enhancement)、图像复原( Image Restoration)、图像重建( Image Reconst ruction)、图像编码(Image Encoding)、图像识别( Image Recognition)、图像理解( Image Understanding)。
数字图像处理在机器视觉中的应用数字图像处理(Digital Image Processing)是利用计算机对数字图像进行处理、分析、显示等操作的技术,是计算机视觉(Computer Vision)领域中的一个重要分支。
随着计算机硬件、算法和理论的不断进步,数字图像处理在各个领域中的应用越来越广泛,特别是在机器视觉(Machine Vision)中的应用。
本文将从以下几个角度探讨数字图像处理在机器视觉中的应用。
一、图像获取机器视觉系统的第一步是图像获取,即从实际场景中采集一幅或多幅图像。
数字图像处理技术可以对图像进行去噪、平滑、增强等处理,从而提高机器视觉系统对图像的理解和分析能力。
例如,在工业自动化中,数字相机可以获取产品表面的图像,用于进行缺陷检测、尺寸测量、形状识别等操作。
在医学影像学中,数字成像设备可以获取人体内部器官的图像,用于诊断和治疗。
图像获取质量的好坏直接影响到后续处理的准确性和效率,因此数字图像处理技术在图像获取方面的应用十分重要。
二、特征提取图像中的特征是指能够在算法中用于计算、比对、分类等操作的数值或向量,如边缘、角点、颜色、形状等。
数字图像处理技术可以对图像进行特征提取,用于从图像中抽取有用的信息,为机器视觉系统的后续操作提供有力支持。
例如,在人脸识别中,可以通过数字图像处理技术提取人脸的特征,用于进行模式匹配。
在机器人视觉中,可以通过数字图像处理技术提取环境中的障碍物、物体等特征,用于进行路径规划和避障。
特征提取是机器视觉中的一个关键问题,也是数字图像处理技术在机器视觉中的一个重要应用点之一。
三、图像配准图像配准(Image Registration)是指将不同位置、角度、尺度等的多幅图像进行对齐,使得它们在空间位置上对应。
数字图像处理技术可以通过特征点匹配、图像变换、形态学变换等方法进行图像配准,从而实现在机器视觉中对多幅图像的无缝拼接、叠加、对比等操作。
例如,在地理信息系统中,可以通过数字图像处理技术进行卫星影像、地形图、路网图等地理信息的配准,用于建立地面3D模型、导航和路径规划等操作。