2019年全国大学生电子设计竞赛赛题A题_电动小车动态无线充电系统
- 格式:pdf
- 大小:243.00 KB
- 文档页数:3
2019电赛仪器仪表类题目
2019年全国大学生电子设计竞赛的仪器仪表类题目共分为三道,题目内容与要求如下:
1. 题目一:超声波测距与避障系统
要求参赛者制作一个能够实时检测前方障碍物距离,并自动调整运动方向以实现避障的智能小车。
具体要求如下:
小车需能够自动检测前方1m范围内的障碍物,并发出声、光报警信号;小车在检测到障碍物后,应能够自动减速并调整运动方向,以实现避障;小车应能够通过无线模块将检测到的障碍物距离信息发送至手机APP。
2. 题目二:智能温湿度控制系统
要求参赛者制作一个能够实时监测并调节室内温湿度的智能控制系统。
具体要求如下:
系统应能够通过传感器实时监测室内温湿度,并将数据发送至手机APP;系统应能够根据用户设定的温湿度范围自动调节空调、加湿器等设备的运行状态,以保持室内环境舒适;
系统应具备语音提示功能,能够实时播报室内温湿度信息。
3. 题目三:智能音频分析仪
要求参赛者制作一个能够对音频信号进行实时采集、分析和处理的系统。
具体要求如下:
系统应能够通过音频接口实时采集音频信号;
系统应能够对采集到的音频信号进行频谱分析、噪声去除、语音识别等处理;
系统应具备可视化界面,能够实时显示音频信号的波形、频谱等信息;
系统应具备语音合成功能,能够将处理后的音频信息以语音形式输出。
以上为2019年全国大学生电子设计竞赛仪器仪表类题目的简要介绍,建议查看全国大学生电子设计竞赛官网获取更多信息。
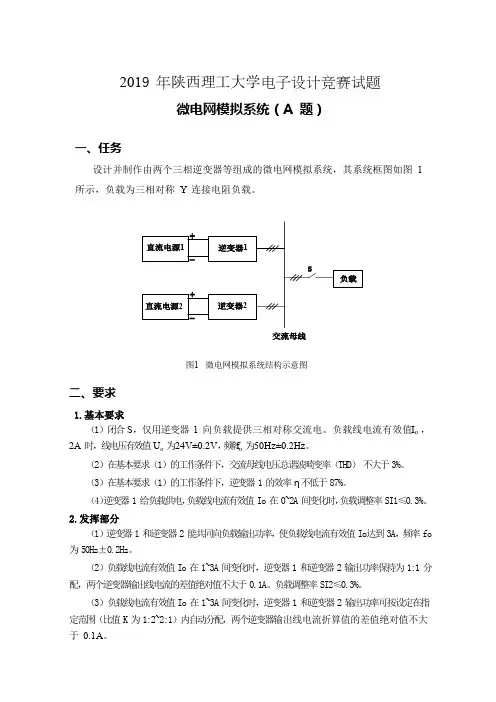
负载2019 年陕西理工大学电子设计竞赛试题微电网模拟系统(A 题)一、任务设计并制作由两个三相逆变器等组成的微电网模拟系统,其系统框图如图 1 所示,负载为三相对称 Y 连接电阻负载。
+- +-交流母线图 1 微电网模拟系统结构示意图二、要求1.基本要求(1)闭合 S ,仅用逆变器 1 向负载提供三相对称交流电。
负载线电流有效值 I o ,2A 时,线电压有效值 U o 为 24V ±0.2V ,频率 f o 为 50Hz±0.2Hz 。
(2)在基本要求(1)的工作条件下,交流母线电压总谐波畸变率(THD ) 不大于 3%。
(3)在基本要求(1)的工作条件下,逆变器 1 的效率 ƞ 不低于 87%。
(4)逆变器 1 给负载供电,负载线电流有效值 Io 在 0~2A 间变化时,负载调整率 SI1≤0.3%。
2.发挥部分 (1)逆变器 1 和逆变器 2 能共同向负载输出功率,使负载线电流有效值 Io 达到 3A ,频率 fo 为 50Hz±0.2Hz。
(2)负载线电流有效值 Io 在 1~3A 间变化时,逆变器 1 和逆变器 2 输出功率保持为 1:1 分配,两个逆变器输出线电流的差值绝对值不大于 0.1A 。
负载调整率 SI2≤0.3%。
(3)负载线电流有效值 Io 在 1~3A 间变化时,逆变器 1 和逆变器 2 输出功率可按设定在指定范围(比值 K 为 1:2~2:1)内自动分配,两个逆变器输出线电流折算值的差值绝对值不大于 0.1A 。
S逆变器2直流电源2逆变器1直流电源1(4)其他。
三、说明(1)本题涉及的微电网系统未考虑并网功能,负荷为电阻性负载,微电网中风力发电、太阳能发电、储能等由直流电源等效。
(2)题目中提及的电流、电压值均为三相线电流、线电压有效值。
(3)制作时须考虑测试方便,合理设置测试点,测试过程中不需重新接线。
(4)为方便测试,可使用功率分析仪等测试逆变器的效率、THD 等。
2019年全国大学生电子设计竞赛试题参赛注意事项(1)8月7日8:00竞赛正式开始。
本科组参赛队只能在【本科组】题目中任选一题;高职高专组参赛队在【高职高专组】题目中任选一题,也可以选择【本科组】题目。
(2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。
(3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生身份的有效证件(如学生证)随时备查。
(4)每队严格限制3人,开赛后不得中途更换队员。
(5)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设计制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违纪参赛队取消评审资格。
(6)8月10日20:00竞赛结束,上交设计报告、制作实物及《登记表》,由专人封存。
模拟电磁曲射炮(J题)【高职高专组】一、任务自行设计并制作一模拟电磁曲射炮(以下简称电磁炮),炮管水平方位及垂直仰角方向可调节,用电磁力将弹丸射出,击中目标环形靶(见图3),发射周期不得超过30秒。
电磁炮由直流稳压电源供电,电磁炮系统内允许使用容性储能元件。
引二、要求电磁炮与环形靶的位置示意如图1及图2所示。
电磁炮放置在定标点处,炮管初始水平方向与中轴线夹角为0°、垂直方向仰角为0°。
环形靶水平放置在地面,靶心位置在与定标点距离200cm≤d≤300cm,与中心轴线夹角a≤±30°的范围内。
1.基本要求(1)电磁炮能够将弹丸射出炮口。
(2)环形靶放置在靶心距离定标点200~300cm间,且在中心轴线上的位置,键盘输入距离d值,电磁炮将弹丸发射至该位置,距离偏差的绝对值不大于50cm。
(3)环形靶放置在中心轴线上,用键盘给电磁炮输入环形靶中心与定标点的距离d,一键启动后,电磁炮自动瞄准射击,按击中环形靶环数计分;若脱靶则不计分。
2.发挥部分(1)环形靶位置参见图2,用键盘给电磁炮输入环形靶中心与定标点的距离d及与中心轴线的偏离角度a,一键启动后,电磁炮自动瞄准射击,按击中环形靶环数计分;若脱靶则不计分。
2019年全国大学生电子设计竞赛试题参赛注意事项(1)8月7日8:00竞赛正式开始。
本科组参赛队只能在【本科组】题目中任选一题;高职高专组参赛队在【高职高专组】题目中任选一题,也可以选择【本科组】题目。
(2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。
(3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生身份的有效证件(如学生证)随时备查。
(4)每队严格限制3人,开赛后不得中途更换队员。
(5)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设计制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违纪参赛队取消评审资格。
(6)8月10日20:00竞赛结束,上交设计报告、制作实物及《登记表》,由专人封存。
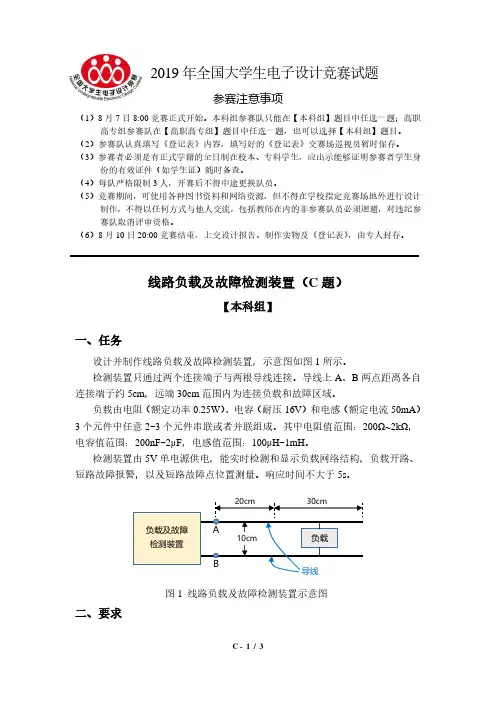
线路负载及故障检测装置(C 题)【本科组】一、任务设计并制作线路负载及故障检测装置,示意图如图1所示。
检测装置只通过两个连接端子与两根导线连接。
导线上A 、B 两点距离各自连接端子约5cm ,远端30cm 范围内为连接负载和故障区域。
负载由电阻(额定功率0.25W )、电容(耐压16V )和电感(额定电流50mA )3个元件中任意2~3个元件串联或者并联组成。
其中电阻值范围:200Ω~2kΩ,电容值范围:200nF~2μF ,电感值范围:100μH~1mH 。
检测装置由5V 单电源供电,能实时检测和显示负载网络结构,负载开路、短路故障报警,以及短路故障点位置测量。
响应时间不大于5s 。
图1 线路负载及故障检测装置示意图二、要求20cm30cm负载导线10cmA B负载及故障检测装置1.基本要求(1)具有负载开路和短路故障分别指示的报警功能。
(2)测试现场给出电阻、电容和电感3个元件,分别测量每个元件值并稳定显示,相对误差的绝对值不大于5%。
每个元件测量时间不大于5s。
(3)可检测由给定电阻、电容和电感3个元件中,任意2~3个元件串联或者并联组成负载的网络结构。
目录摘要 (3)1•设计任务及要求 (4)1.1设计任务 (4)1.2设计要求 (4)2.系统方案 (5)2.1控制模块的论证与选择 (5)2.2电源模块的论证与选择 (5)2.3小车车体的论证与选择 (6)2.4电机模块的论证与选择 (6)2.5电机驱动模块的论证与选择 (6)2.6寻迹模块的论证与选择 (7)2. 7避障模块的论证与选择 (7)2.8显示模块的论证与选择 (7)2. 9按键模块的论证与选择 (8)2. 10通信模块的论证与选择 (8)2. 11方案选定 (9)3.系统的理论分析与计算 (10)3.1系统的信号检测与控制 (10)3. 1. 1系统的信号检测 (10)3.1.2系统的信号控制 (10)3.2两车之间的通信方法 (11)3.3节能 (11)4.电路与程序设计 (12)4.1电路的设计 (12)4. 1. 1系统总体框图 (12)4. 1.2控制器的电路设计 (13)4. 1.3稳压电源的电路设计 (13)4. 1.4电机驱动电路的设计 (14)4.2程序的设计 (15)4. 2.1程序功能描述与设计 (15)4. 2.2程序流程图 (16)5.测试方法与测试结果 (19)5.1测试方案 (19)5.2测试条件与仪器 (19)5.3测试结果及分析 (19)5. 3. 1测试数据 (19)5. 3.2测试分析与结论 (19)參考文献 (17)附录1 (18)附录2 (19)附录3 (20)• •智能小车的设计摘要:本作品以低功耗的ATmegal6单片机为控制核心;MP2307稳压电路供电; 使用光电传感器寻线和避障;LN298N驱动电机;以光电传感器来实现甲乙两车之间的通信;结合了PWM调速等技术,设计了一组智能小车。
该小车的车体由控制、电源、按键、小车硬件、电机、电机驱动.寻迹、避障、显示和光电传感通信等十个模块组成,可用于无人驾驶、自动探测等人工智能领域。
关键字:ATmegal6. MP2307.光电、LN298N1.设计任务及要求1-1设计任务甲车车头紧靠起点标志线,乙车车尾紧靠边界■甲、乙两辆小车同时起动,先后通过起点标志线,在行车道同向而行,实现两车交替超车领跑功能。
2019年全国大学生电子设计竞赛综合测评题综合测评注意事项(1)综合测评于2019 年8 月19 日8:00 正式开始,8 月19 日15:00 结束。
(2)本科组和高职高专组优秀参赛队共用此题。
(3)综合测评以队为单位采用全封闭方式进行,现场不能上网、不能使用手机。
(4)综合测评结束时,制作的实物及《综合测评测试记录与评分表》由全国专家组委派的专家封存,交赛区保管。
多信号发生器使用题目制定综合测评板上的一片LM324AD(四运放)和一片SN74LS00D(四与非门)芯片设计制作一个多路信号发生器,如下图所示。
设计报告应给出方案设计、详细电路图、参数计算和现场自测数据波形(一律手写),综合测评板编号及3个参赛同学签字需在密封线内,限2页,与综合测评板一同上交。
u o1U o1————方波U o2————占空比连续可调窄脉冲U o3————正弦波U o4————余弦波一.约束条件1.一片SN74L.S0OD四与非门芯片(综合测评板上自带);2. 一片LM324AD四运算放大器芯片(综合测评板上自带);3.赛区提供固定电阻、固定电容、可变电阻元件(数量不限、参数不限);4.赛区提供直流电源。
二.设计任务及指标要求利用综合测评板和若干电阻、电容元件,设计制作电路产生下列四路信号:1.频率为19kHz~2IkHz连续可调的方波脉冲信号,幅度不小于3.2V;2.与方波同频率的正弦波信号,输出电压失真度不大于5%,峰-峰值(Vpp)不小于1V;3.与方波同频率占空比5%~15%连续可调的窄脉冲信号,幅度不小于3.2V;4.与正弦波正交的余弦波信号,相位误差不大于5°,输出电压峰-峰值(Vpp)不小于1V。
各路信号输出必须引至测评板的标注位置并均需接1kΩ负载电阻(R L),要求在引线贴上所属输出信号的标签,便于测试。
三.说明1.综合测评应在模电或数电实验室进行,实验室提供常规仪器仪表和工具;2. SN74LS00D和LM324AD芯片使用说明书随综合测评板并提供;3.参赛队应在理论设计基础上进行实验调试,理论设计占一定分值,各部分分数(包括理论设计)分配为:方波占10分、正弦波占8分、窄脉冲占6分、正交的余弦波占6分;4.不允许在测评板上增加使用IC芯片,如果增加芯片则按0分记;5.原则上不允许在测评板上增加使用BJT、FET和二极管,如果增加则按3分/只扣分;6.原则上不允许参赛队更换测评板,如果损坏测评板只可更换一次并扣10分;7.各路信号测试应在电路互联且加负载情况下进行,单独模块测试相应得分减半;8.本科组只允许使用单一+5V电源,增加使用直流电源的扣除10分。
本篇论文为电子设计大赛以IAP15F2K61S2单片机为控制芯片的无线充电电动车控制系统的设计,内容和格式可以作为比赛或者课程设计论文的参考,本文为原创,仅供参考请勿抄袭。
《设计报告》摘要:本文是以IAP15F2K61S2单片机为控制芯片的无线充电电动车控制系统的设计,整个系统包含CPU模块、无线发射器模块、无线接收器模块、电机驱动模块、电源等模块,并运用超级电容作为储能原件进行设计。
本系统采用ATMEL公司的51系列单片机和TI公司TPS63020芯片、LM2596稳压芯片等元件完成无线充电电动车的控制设计要求。
TI公司的TPS63020芯片来进行DC-DC变换可以有效的进行直流电源的电压转换。
关键字:IAP15F2K61S2单片机、无线充电、TPS63020、超级电容。
1.方案选择与论证 (3)1.1主控制器方案与选择 (3)1.2电动车部分稳压模块的方案与选择 (3)2.理论分析与计算系统相关参数设计 (3)2.1无线充电装置分析与计算 (3)3.电路与程序设计 (5)3.1电路设计 (5)4.测试方案与测试结果 (6)4.1方案与结果 (6)4.2测试结果分析: (7)5.总结 (7)6.参考文献 (8)1.方案选择与论证1.1主控制器方案与选择方案一:采用可编程逻辑器件CPLD 作为控制器。
CPLD 可以实现各种复杂的逻辑功能,易于进行功能扩展。
采用并行的输入输出方式,提高了系统的处理速度,适合作为大规模实时系统的控制核心。
方案二:采用IAP15F2K61S2单片机进行控制。
IAP15F2K61S2结构简单,接线方便,片内大容量2048字节的SRAM ,运行快速、稳定,可在电磁干扰情况下工作。
IAP15F2K61S2单片机编程方便,还可以在线编程、下载、调试。
综合考虑:选择方案二。
IAP15F2K61S2单片机编程更方便合适。
1.2电动车部分稳压模块的方案与选择方案一:采用XL4061E1稳压模块。
电子设计大赛运动小车追踪系统运作设计方案1.系统方案设计1.1 设计任务(1)制作遥控电动小车,具有遥控前进、转向、倒车功能,可实时显示小车当前运动速度,并无线传输至遥控器端显示,速度误差小于10%,小车速度大于 0.1 米/ 秒。
(2)制作小车位置跟踪节点,可实时测量小车与已知点距离及速度,测量误差小于 10%。
(3) 增加小车运动位置跟踪节点,可在平面进行位置定位,示意图如下 , 定位误差小于 10%。
(4)将各小车位置跟踪节点数据传输至遥控器并进行实时位置显示。
2.方案论证与选择2.1单片机的选定方案一:采用型号为AT89C52 的单片机作为主控制器,使用霍尔传感器进行测量的直流电机转速测量系统。
AT89C52 是带 4K 字节闪烁可编程擦除只读存储器的低电压、高性能 CMOS8位微处理器。
它将多功能 8 位 CPU和闪烁存储器组合在单个芯片中,为许多控制提供了灵活性高且价格低廉的方案[3] 。
方案二:采用单片机 C8051F060 作为主控制器,使用霍尔传感器进行测量的直流电机转速测量系统。
C8051F060 系列单片机是美国 CYGNAL 公司推出的一种与 51 系列单片机核兼容的单片机[4]。
C8051F060 作为新一代 8051 单片机,具有功能强大、体积小、工作稳定等特点,适用于复杂控制系统。
因此选择方案一。
AT89C52是美国 ATMEL公司生产的低电压,高性能 CMOS8位单片机。
片含8kbytes 的可反复擦写的只读程序存储器( PEROM)和 256bytes 的随机存储数据存储器( ROM),器件采用 ATMEL公司的高密度,非易失性存储技术生产,与标准MCS-51指令系统及 8052 产品引脚兼容,片置通用 8 位中央处理器(CPU)和 Flash 存储单元,功能强大的 AT89C52单片机适合于许多较为复杂的控制应用场合。
3.系统功能模块的划分按照设计要求,系统可以分为以下几个基本功能模块:电源模块、红外发射模块、键盘模块、红外接收模块、电机驱动模块以及辅助模块,超声波定位模块等。
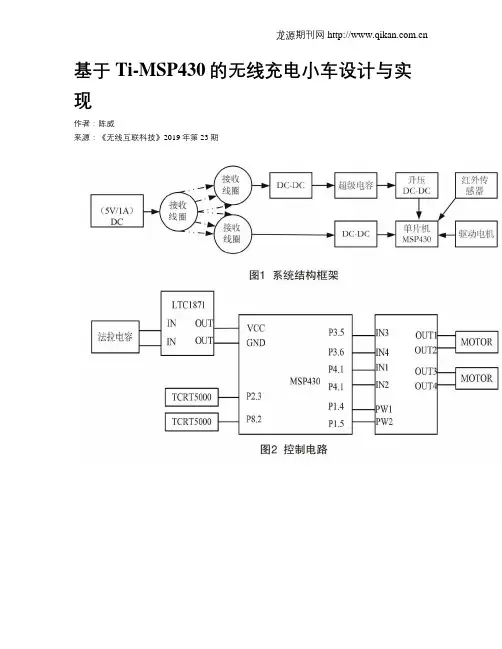
基于Ti-MSP430的无线充电小车设计与实现作者:***来源:《无线互联科技》2019年第23期摘要:电动汽车如今成为整个汽车行业关注的对象。
随着电动汽车技术的快速发展,传统式电动汽车充电方式的一系列问题都被暴露出来,阻碍了电动汽车市场快速发展。
随着无线充电传输技术被引入电动汽车充电领域,尤其是自动泊车和自动驾驶的技术逐渐成熟,人们对无线充电的需求也越来越强烈。
文章提出了一种基于Ti-MSP430的无线充电小车设计。
关键词:MSP-EXP430F5529LP;无线充电;电动小车1 设计方案本设计以MSP-EXP430F5529LP为核心,利用电磁感应原理,线圈与发射线圈配合对超级电容进行充电并为MSP430供电,并通过DC-DC升压模块得到稳定电压为驱动电机供电。
将充电小车放置在发射线圈上,自动充电一分钟,充电完成后能自启动并完成相应功能。
本设计把能够实现无线充电并能自动识别充电时间的车模和控制器看作一种自动控制系统,该系统由单片机、无线充电、电机驱动和法拉电容蓄电4个部分组成。
其中,5 V/1 A的直流电源为无线发射端提供电源,使用TI无线充电发射模块(BQ500211)和接收模块(BQ51013A)进行无线充电。
使用BOOST结构设计稳压电路,使法拉电容输入输出稳定的电压,以延长其使用寿命,再由驱动电路控制电机的运转。
系统框架如图1所示。
2 硬件电路设计2.1 主控电路的设计由于赛题要求只能选用TI公司的处理器作为主控,在综合了几款TI的处理器后,结合本组的知识储备,选用TI MSP430芯片。
控制原理如图2所示。
2.2 单元电路的设计2.2.1 无线充电发射接收模块TI公司提供了一种无线电源发射器和接收器的控制芯片,可支持WPC联盟Qi协议标准。
本设计采用了TI的一款BQ500211新型发射器控制芯片,同时该芯片也符合Qi标准,能实现对基站和移动设备进行智能化控制[1]。
另一块为BQ51013A的集成性接收器控制芯片,由低压降稳压器、低阻抗全同步整流器、电压和电流环路组成,整个功耗保持了高效率和低功耗耗散,为相应设备提供了稳定的DC输出和具有稳定性的控制反馈[2]。
2019年电赛题目专科
【实用版】
目录
1.2019 年电赛题目介绍
2.专科赛题分析
3.参赛者需具备的技能和知识
4.赛事对专科学生的意义
5.总结
正文
【2019 年电赛题目介绍】
2019 年全国大学生电子设计竞赛的题目在 7 月份正式公布。
此次竞赛吸引了众多电子信息类专业的学生参加,旨在促进电子技术与应用的发展,培养和选拔优秀的电子信息类人才。
【专科赛题分析】
2019 年电赛的专科赛题主要涉及模拟电子技术、数字电子技术、电子线路等基本电子技术领域。
题目设置注重实际应用,要求参赛者设计并实现具有一定创新性和实用性的电子产品。
【参赛者需具备的技能和知识】
参加电赛需要具备一定的电子技术基础,包括模拟电子技术、数字电子技术、电子线路等。
此外,还需要具备一定的编程能力,如 C 语言、汇编语言等。
同时,参赛者需要具备较强的动手能力,能够将设计方案付诸实践。
【赛事对专科学生的意义】
参加电赛对专科学生具有重要意义。
首先,通过参加比赛,学生可以
巩固所学专业知识,提高实际应用能力。
其次,电赛可以锻炼学生的团队协作能力和沟通能力。
最后,电赛成绩优秀的学生还有机会获得奖学金、实习机会等,对今后的发展具有积极意义。
【总结】
2019 年电赛为电子信息类专业的专科学生提供了一个展示自己才华的平台。
通过参加比赛,学生可以提高自己的专业技能和综合素质,为今后的发展打下坚实基础。
1 正弦波功率输出装置一、任务设计并制作一个正弦波功率输出装置。
二、要求1、基本要求①输入为单相市电;②输出频率范围为20Hz~100Hz的交流电,输出电压有效值为36V,负载为阻性负载;③输出电压波形应尽量接近正弦波,用示波器观察无明显失真;④当输入电压为198V~242V,负载电流有效值为0.1~2A时,输出电压有效值应保持在36V,误差的绝对值小于5%;⑤具有过流保护(输出电流有效值大于3A时动作),保护时自动切断输入交流电源。
2、发挥部分①当输入电压为198V~242V,负载电流有效值为0.5~3A时,输出电压有效值应保持在36V,误差的绝对值小于1%;②设计制作具有测量、显示该装置输出电压、电流、频率和功率的电路,测量误差的绝对值小于5%;③其它。
2 程控交流电压源1、基本要求(1)单、三相电压均可独立可调,每相输出电压30-150V程控连续可调,步进1V;(2)输出频率200-800Hz程控连续可调,步进1Hz;(3)每相输出功率不小于10W;(4)输出电压精度:±0.5V,输出频率精度:±1Hz;(5)波形失真度:<1%;(6)显示电压、频率精确到小数点后一位;(7)通讯方式自选。
2、发挥部分(1)三相交流程控电压源输出电压范围:5V-180V;(2)三相交流程控电压源每相输出功率:不小于20W;(3)三相交流程控电压源输出电压精度:±0.1V;(4)其它。
3 智能搬运小车一、设计任务设计并制作一个能自动搬运货物的智能电动车,其工作示意图如下。
图中,左边为停车区、货物存储区A 和货物存储区B,并有两个对应的射灯光源;距右边线30 cm 处共放置3 片白色或黑色的薄铁片,铁片之间的距离大于20cm。
二、要求1、基本要求(1)智能车从起跑线出发(车体不得超过起跑线),在无障碍物的情况下,可寻找并搬取铁片,按照不同颜色分送不同存储区,即在光源A 的引导下将黑色铁片搬运到货物存储区A 存放,或在光源B 的引导下将白色铁片搬运到存储区B 存放(装载方式不限制)。
2021年全国大学生电子设计竞赛题目A E题2021年全国大学生电子设计竞赛题目a-e题文章来源:凌阳科技教育推广中心发布时间:2021-9-317:18:49音频信号分析仪(a题)【本科组】一、任务设计、制作一个可分析音频信号频率成分,并可测量正弦信号失真度的仪器。
二、要求1.基本要求(1)输入阻抗:50ω(2)输入信号电压范围(峰-峰值):100mv~5v(3)输入信号包含的频率成分范围:200hz~10khz(4)频率分辨力:100hz(可以恰当测量被测信号中,频差不大于100hz的频率分量的功率值。
)(5)检测输出信号的总功率和各频率分量的频率和功率,检测出来的各频率分量的功率之和不大于总功率值的95%;各频率分量功率测量的相对误差的绝对值大于10%,总功率测量的相对误差的绝对值大于5%。
(6)分析时间:5秒。
需以5秒周期创下分析数据,信号各频率分量应当按功率大小依次存储并可以录像表明,同时实时表明信号总功率和至少前两个频率分量的频率值和功率值,并设暂停键维持表明的数据。
2.充分发挥部分(1)扩大输入信号动态范围,提高灵敏度。
(2)输出信号涵盖的频率成分范围:20hz~10khz。
(3)减少频率分辨力20hz档。
(4)判断输入信号的周期性,并测量其周期。
(5)测量被测正弦信号的失真度。
(6)其他。
三、说明1.电源需用成品,必须自带,一般会自造。
2.设计报告正文中应包括系统总体框图、核心电路原理图、主要流程图、主要的测试结果。
完整的电路原理图、重要的源程序、和完整的测试结果用附件给出。
无线辨识装置(b题)【本科组】一、任务设计制作一套无线识别装置。
该装置由阅读器、应答器和耦合线圈组成,其方框图参见图1。
阅读器能识别应答器的有无、编码和存储信息。
图1无线辨识装置方框图装置中阅读器、应答器均具有无线传输功能,频率和调制方式自由选定。
不得使用现有射频识别卡或用于识别的专用芯片。
装置中的耦合线圈为圆形空芯线圈,用直径不大于1mm的漆包线或有绝缘外皮的导线密绕10圈制成。
论文编号:C甲024052011年全国大学生电子设计竞赛报告智能小车参赛学校:山东科技大学参赛学生:郭明阳韩瑞华刘思庆联系电话:151****57232011年9月3日摘要本系统采用型号为TMS320F2812的DSP芯片设计了两台智能小车。
系统硬件主要有中央处理器、传感采集电路、小车、电机驱动电路等四部分组成。
传感器选用有避障功能红外避障传感器及检测黑白线功能的TCRT5000红外反射式接近开关传感器,在小车运行过程中及时检测行驶车道标志线、跑道两侧边界线以及前方障碍,实时将信息传输给DSP中央处理器,中央处理器根据控制算法发出控制指令,控制小车按照预定要求运行。
实验测试结果表明,本系统满足了赛题规定的各项指标要求。
关键词:DSP;PWM;智能小车;红外避障目录一、系统方案设计与论证 (4)1.1方案比较与论证 (4)1.1.1直流电动机驱动 (4)1.1.2 避障模块 (4)1.1.3 黑白线检测模块 (4)1.2信号的检测控制方案 (5)1.2.1电机的信号控制过程 (5)1.2.2黑白线、障碍信号检测的控制 (5)1.3系统算法与误差分析 (6)1.3.1直流电机同步算法与误差分析 (6)1.3.2转弯角度的大小算法与误差分析 (6)1.3.3预防小车出轨的算法与误差分析 (6)二、电路设计 (6)三、系统软件设计 (7)四、测试与结果分析 (8)4.1硬件测试与结果分析 (8)4.1.1小车车体 (8)4.1.2直流电机驱动 (8)4.1.3黑白线检测模块 (8)4.1.4红外壁障模块: (8)4.2软件测试与结果分析 (9)4.2.1单行模式 (9)4.2.2超车模式 (9)附件 (10)附件1.件模块 (10)附件2.电路设计 (12)附件3.小车实体 (13)附件4.主要程序清单 (14)一、系统方案设计与论证结合直流电动机相对良好的调速特性及较小的功耗特性,利用DSP产生的PWM波控制智能小车实现要求。
参赛注意事项
(1)8月7日8:00竞赛正式开始。
本科组参赛队只能在【本科组】题目中任选一题;高职高专组参赛队在【高职高专组】题目中任选一题,也可以选择【本科组】题目。
(2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。
(3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生身份的有效证件(如学生证)随时备查。
(4)每队严格限制3人,开赛后不得中途更换队员。
(5)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设计制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违纪参赛队取消评审资格。
(6)8月10日20:00竞赛结束,上交设计报告、制作实物及《登记表》,由专人封存。
电动小车动态无线充电系统(A题)
【本科组】
一、任务
设计并制作一个无线充电电动小车及无线充电系统,电动小车可采用成品车改制,全车重量不小于250 g,外形尺寸不大于30cm×26cm,圆形无线充电装置发射线圈外径不大于20cm。
无线充电装置的接收线圈安装在小车底盘上,仅采用超级电容(法拉电容)作为小车储能、充电元件。
如图1所示,在平板上布置直径为70cm的黑色圆形行驶引导线(线宽≤2cm),均匀分布在圆形引导线上的A、B、C、D点(直径为4cm的黑色圆点)上分别安装无线充电装置的发射线
圈。
无线充电系统由1台5V的直流稳压电源供电,输出电流不大于1A。
图1 电动小车行驶区域示意图
二、要求
1. 基本要求
(1)小车能通过声或光显示是否处在充电状态。
(2)小车放置在A点,接通电源充电,60秒时断开电源,小车检测到发射线圈停止工作自行起动,沿引导线行驶至B点并自动停车。
(3)小车放置在A点,接通电源充电,60秒时断开电源,小车检测到发射线圈停止工作自行起动,沿引导线行驶直至停车(行驶期间,4个发射线
圈均不工作),测量小车行驶距离L1,L1越大越好。
2. 发挥部分
(1)小车放置在A点,接通电源充电并开始计时;60秒时,小车自行起动(小车超过60秒起动按超时时间扣分),沿引导线单向不停顿行驶直至
停车(沿途由4个发射线圈轮流动态充电);180秒时,如小车仍在行驶,
则断开电源,直至停车。
测量小车行驶距离L2,计算L=L2-L1,L越大越
好。
(2)在发挥部分(1)测试中,测量直流稳压电源在小车开始充电到停驶时间段内输出的电能W,计算K= L2/W,K越大越好。
(3)其他。
三、说明
(1)本题所有控制器必须使用TI公司处理器。
(2)小车行驶区域可采用表面平整的三夹板等自行搭建,4 个发射线圈可放置在板背面,发射线圈的圆心应分别与A、B、C、D圆点的圆心同心。
(3)作品采用的处理器、小车全车重量、外形尺寸、发射线圈最大外形尺寸及安装位置不满足题目要求的作品不予测试。
(4)每次测试前,要求对小车的储能元件进行完全放电,从而确保测试时小车无预先额外储能。
(5)题中距离L的单位为cm,电能W的单位为Wh。
(6)测试小车行驶距离时,统一以与引导线相交的小车最后端为测量点。
(7)基本要求(2)测试中,小车停车后,其投影任一点与B点相交即认为到达B点。
(8)在测试小车行驶距离时,如小车偏离引导线(即小车投影不与引导线相交),则以该驶离点为该行驶距离的结束测试点。
四、评分标准。