图的最短路径_dijkstra算法
- 格式:ppt
- 大小:691.01 KB
- 文档页数:29
Dijkstra算法(Dijkstra算法)由荷兰计算机科学家Dikstra于1959年提出,因此也称为Dikstra算法。
从一个顶点到其余顶点的最短路径算法解决了权利图中的最短路径问题。
Dijestela算法的主要特征是从起点开始,采用贪婪算法的策略。
每次,它都会遍历最接近且未访问过的顶点的相邻节点,直到起点为止。
Dijkstra的算法通常以两种方式表示,一种使用永久和临时标签,另一种使用OPEN和CLOSE表,两者都使用永久和临时标签。
请注意,该算法不需要图形中的负边缘权重。
1.首先,引入一个辅助数组(向量)D,其中每个元素D代表当前找到的Dijkstra运行动画过程Dijkstra运行动画过程从起点(即源点)到其他每个顶点的长度。
例如,D = 2表示从起点到顶点3的路径的相对最小长度为2。
这里的重点是相对的,这意味着D在算法执行期间近似于最终结果,但不一定相等执行期间的长度。
2. D的初始状态为:如果存在一个从to的弧(即,存在一个从to的连接边),则D是弧上的权重(即,从to的边的权重);否则,将D设置为无穷大。
显然,长度为D = Min {D | ∈V}是从起点到顶点的最短路径,即()。
3.那么,下一个最短的长度是?即找到与从源点到下一顶点的最短路径长度相对应的顶点,并且该最短路径长度仅次于从源点到顶点的最短路径长度。
假设子短路径的终点是,则可以想象路径是()或()。
它的长度是从PI到PI的弧上的权重,或者是D加上从PI到PI的弧上的权重。
4.通常,假定S是从源点获得的最短路径长度的一组顶点,则可以证明下一条最短路径(令其终点为)是arc()或仅从源点穿过中间的S顶点,最后到达顶点。
因此,具有较短长度的下一个最短路径长度必须为D = Min {D | ∈v-s},其中D是arc()上的权重,或者D(∈S)和arc(,)上的权重之和。
该算法描述如下:1)让圆弧代表圆弧上的重量。
如果弧不存在,则将弧设置为无穷大(在这种情况下为MAXCOST)。
多地点的最短路径算法多地点最短路径算法是指在多个起点和多个终点之间寻找最优路径的算法。
在实际应用中,例如GPS导航系统和物流配送等领域,多地点最短路径算法具有重要的应用价值。
本文将介绍几种用于解决多地点最短路径问题的算法,包括Dijkstra算法、Floyd算法和A*算法。
1. Dijkstra算法Dijkstra算法是一种基于贪心策略的最短路径算法,广泛应用于图形问题中。
它的基本思想是不断扩展距离最短的节点,直到求得所有节点的最短路径。
在多地点最短路径问题中,可以将起点按顺序逐一添加到集合中,然后针对每个起点运行Dijkstra算法,最终得到每个终点的最短路径。
2. Floyd算法Floyd算法是一种动态规划算法,可以求出从任一起点到任一终点的最短路径。
它通过记录任意两个节点之间经过的中间节点,并计算出经过这些中间节点的最短路径长度。
在多地点最短路径问题中,可以构建一个权重矩阵,矩阵中的每个元素代表两个节点之间的距离,然后运行Floyd算法,最终得到每个起点到每个终点的最短路径。
3. A*算法A*算法是一种启发式搜索算法,它在搜索过程中利用信息启发式函数来预估从当前节点到目标节点的路径成本,以便更快地找到最短路径。
在多地点最短路径问题中,可以将每个起点作为初始节点,每个终点作为目标节点,然后运行A*算法,最终得到每个起点到每个终点的最短路径。
总结在多地点最短路径问题中,Dijkstra算法、Floyd算法和A*算法都可以用来寻找最优路径。
Dijkstra算法适用于较小的问题,而且算法复杂度为O(n²),适用于稠密图。
Floyd 算法适用于较大的问题,复杂度为O(n³),适用于稀疏图。
A*算法可以在比较短时间内找到近似最优解,但在处理复杂的问题时速度较慢。
根据实际应用的具体要求,可以选择适合的算法。
Dijkstra算法是一种用于计算图中从一个顶点到其他所有顶点的最短路径的算法。
它由荷兰计算机科学家艾兹赫尔·戴克斯特拉于1956年提出。
Dijkstra算法的基本思想是通过不断更新起始顶点到其他顶点的最短路径长度,逐步找到最短路径。
以下将详细介绍Dijkstra算法的步骤,并给出一个例题和表格供读者参考。
一、算法步骤1. 初始化- 设置起始顶点的最短路径为0,其余顶点的最短路径为无穷大。
- 将起始顶点加入已访问的顶点集合。
2. 更新- 从未访问的顶点中选择离起始顶点最近的顶点,将其加入已访问的顶点集合。
- 更新起始顶点到其他顶点的最短路径长度,如果经过新加入的顶点到其他顶点的路径长度小于当前已知的最短路径长度,则更新最短路径长度。
3. 重复更新直到所有顶点都被访问过。
二、算法实例为了更好地理解Dijkstra算法的具体应用步骤,我们通过一个实际的例题来演示算法的执行过程。
假设有以下带权重的图,起始顶点为A:顶点 A B C D EA 0 3 4 ∞ ∞B ∞ 0 ∞ 1 7C ∞ 4 0 2 ∞D ∞ ∞ ∞ 0 5E ∞ ∞ ∞ ∞ 0表中每个元素表示从对应顶点到其它顶点的边的权重,"∞"表示没有直接相连的边。
我们按照Dijkstra算法的步骤来计算从顶点A到其他顶点的最短路径长度。
1. 初始化起始顶点为A,初始化A到各顶点的最短路径长度为0,其余顶点的最短路径长度为∞。
将A加入已访问的顶点集合。
2. 更新选择A到B的路径长度最短,将B加入已访问的顶点集合。
更新A到C和A到D的最短路径长度。
3. 重复更新依次选择离起始顶点最近的顶点,并更新最短路径长度,直到所有顶点被访问。
通过不断的更新,最终得到从顶点A到其他顶点的最短路径长度表格如下:顶点 A B C D E最短路径长度 0 3 4 5 9三、总结通过以上Dijkstra算法的步骤和实例计算,我们可以清晰地了解该算法的执行过程和原理。
迪杰斯特拉算法c语言一、什么是迪杰斯特拉算法?迪杰斯特拉算法(Dijkstra algorithm)是一种用于解决图的最短路径问题的贪心算法。
它采用了广度优先搜索的策略,每次找到当前节点到其他所有节点中距离最短的一个节点,并将该节点加入到已访问的集合中,直到所有节点都被访问为止。
二、迪杰斯特拉算法的原理1. 初始化首先,我们需要对图进行初始化。
设定一个起点,并将该点距离源点的距离设置为0,其他点距离源点的距离设置为无穷大。
2. 找到最小距离接下来,我们需要从未访问过的节点中找到距离源点最近的一个节点。
这个过程可以通过建立一个优先队列来实现。
在每次找到最小值后,我们需要将该节点标记为已访问,并更新与该节点相邻的所有未访问过的节点的最小距离值。
3. 更新最短路径在更新与当前节点相邻的所有未访问过的节点之后,我们需要重新寻找未访问过的节点中距离源点最近的一个。
这个过程会不断重复直至所有节点都被访问过。
4. 输出结果当所有节点都被访问过之后,我们就可以得到从源点到其他所有节点的最短路径。
三、迪杰斯特拉算法的实现以下是一个使用C语言实现的简单示例代码:```c#define INF 1000000 // 定义无穷大int dist[MAX_VERTEX_NUM]; // 存储距离源点的距离int visited[MAX_VERTEX_NUM]; // 标记是否已访问过// 初始化图void init_graph(Graph G, int start) {for (int i = 0; i < G.vertex_num; i++) {dist[i] = INF;visited[i] = 0;}dist[start] = 0;}// 找到距离源点最近的节点int find_min(Graph G) {int min_dist = INF, min_index = -1;for (int i = 0; i < G.vertex_num; i++) {if (!visited[i] && dist[i] < min_dist) {min_dist = dist[i];min_index = i;}}return min_index;}// 更新与当前节点相邻的节点的最短距离值void update_dist(Graph G, int index) {for (EdgeNode* p = G.adj_list[index].first_edge; p != NULL; p= p->next_edge) {int v = p->adjvex;if (!visited[v] && dist[index] + p->weight < dist[v]) {dist[v] = dist[index] + p->weight;}}}// 迪杰斯特拉算法void dijkstra(Graph G, int start) {init_graph(G, start);for (int i = 0; i < G.vertex_num; i++) {int index = find_min(G);visited[index] = 1;update_dist(G, index);}}```四、迪杰斯特拉算法的应用迪杰斯特拉算法可以用于解决许多实际问题,如路由选择、网络优化等。
Dijkstra算法在地图导航中的应用地图导航已经成为了我们日常生活中不可或缺的一部分。
作为现代科技的产物,地图导航为我们提供了沿途路线、建筑物信息以及实时交通情报等功能。
在地图导航应用的背后,有许多计算机算法支撑着这一系统的运行。
其中,Dijkstra算法是一种被广泛使用的算法之一。
本文将讨论Dijkstra算法在地图导航中的应用。
Dijkstra算法是一种用来查找图中最短路径的贪心算法。
该算法基于一个简单的思想:对于一个起点到各个节点的所有路径进行遍历,并确定最短的路径。
在使用Dijkstra算法时,我们需要首先建立起图的数据结构。
Dijkstra算法通常包括以下步骤:1.设定起点,创建列表存储当前路径及开销(距离)。
2.遍历与起点相邻的节点并记录下权重(距离)。
3.记录当前最小权重的邻居节点,并标记其为已经访问。
4.重复此过程,直到遍历完全部节点,或找到终点。
5.回溯记录路径。
在地图导航中,Dijkstra算法通过乘坐工具、道路拓扑结构、地点信息、实时交通等数据,并结合现代的计算机技术,计算出用户的最优行进路径。
Dijkstra算法在随机访问的图中的时间复杂度为O(V2)或O(E×logV)。
其中,V指定点的数量,E指边的数量。
虽然Dijkstra算法的时间复杂度有一定的限制,但仍可以在处理中等规模的地图数据时得出高效的结果。
在现实世界中使用时,建立连接图所需的成本是一个先决条件,这也极大地限制了Dijkstra算法在一些场合的使用。
地图导航中的Dijkstra算法的应用有很多,其中最常见的一种是计算最短路径。
这通常在我们给定起点和终点时使用,它会计算出最短路径,并让用户完成从起点到终点的出行。
在路口叉多或者道路复杂的地方,Dijkstra算法可以帮助准确的指引用户走向目的地。
除此之外,Dijkstra算法还可以用于搜索到达医院、银行、学校等特定目的地的最短路径。
Dijkstra算法实现的最大难点之一是如何处理交通拥堵的情况。
Dijkstra算法1. 引言Dijkstra算法是一种用于解决图中单源最短路径问题的经典算法。
由荷兰计算机科学家Edsger W. Dijkstra于1956年提出,被广泛应用于路由选择、网络优化等领域。
本文将介绍Dijkstra算法的基本原理、实现步骤以及应用场景。
2. 基本原理Dijkstra算法通过构建一个有向加权图来描述问题,其中每个节点表示一个地点,边表示两个地点之间的路径,边上的权重表示路径的长度或代价。
该算法通过不断更新起始节点到其他节点的最短路径长度和路径信息,逐步扩展搜索范围,直到找到起始节点到目标节点的最短路径。
3. 实现步骤Dijkstra算法的实现主要包括以下几个步骤:步骤1:初始化•创建一个集合S来存放已经找到最短路径的节点。
•创建一个数组dist[]来存放起始节点到其他节点的当前最短距离估计值。
•创建一个数组prev[]来存放起始节点到其他节点的当前最短路径上该节点的前驱节点。
•将起始节点加入集合S,并将dist[]数组初始化为正无穷大(除了起始节点的距离设为0)。
步骤2:更新最短路径信息•从集合S中选择一个距离起始节点最近的节点u。
•对于u的每个邻接节点v,如果通过u能够获得更短的路径长度,则更新dist[v]和prev[v]的值。
•将节点u从集合S中移除。
步骤3:重复步骤2直到找到目标节点或集合S为空•重复步骤2,直到目标节点被加入集合S或者集合S为空。
步骤4:构建最短路径•根据prev[]数组构建起始节点到目标节点的最短路径。
4. 应用场景Dijkstra算法在许多领域都有广泛应用,下面列举几个常见的应用场景:4.1 路由选择在计算机网络中,路由器需要根据网络拓扑和链路状态来选择最优路径进行数据包转发。
Dijkstra算法可以用于计算每个路由器到其他路由器之间的最短路径,以便做出最优路由选择。
4.2 网络优化在通信网络中,带宽限制、传输延迟等因素会影响网络性能。
dijkstra算法流程
Dijkstra算法是一种解决单源最短路径问题的贪心算法。
它最早由荷兰计算机科学家Edsger W.Dijkstra于1959年提出,是图论中非
常基础的算法。
它被广泛应用于交通运输、计算机网络等领域,它可
以算出从起点到其他所有节点的最短路径。
下面我们来看一下Dijkstra算法的具体流程:
1.首先,我们要明确起点,并把起点标记为到起点最短路径为0,其他顶点至起点的最短路径为正无穷。
2.然后从起点开始,依次访问与它相邻的顶点,计算这些顶点与
起点的距离,并把它们的距离作为这些顶点的到起点的距离参数。
3.接下来,从这些顶点中找到距离起点最短的顶点,并且把这个
顶点标记为已确定最短路径。
4.然后,更新与这个点相邻的所有未确定最短路径的顶点的最短
路径。
如果新路径比其原路径更短,则更新路径;若没有更短,则保
留原路径。
5.重复第三步和第四步,直到找到起点到终点的最短路径。
6.最后,我们就能得到最短路径和各个顶点的距离。
通过以上的算法流程,我们可以计算出起点到其他所有顶点的最
短路径。
需要注意的是,Dijkstra算法只适用于边权为非负的有向图
或无向图。
在实际应用中,Dijkstra算法更多的是基于图的模型进行
路由选择和网络通信优化。
总结起来,Dijkstra算法是一种基于节点遍历、操作路径的贪心算法,它是求解最短路径问题中的一种重要算法。
虽然Dijkstra算法
只适用于边权为非负的有向图或无向图,但是它的计算效率相对较高,并且非常容易理解和实现。
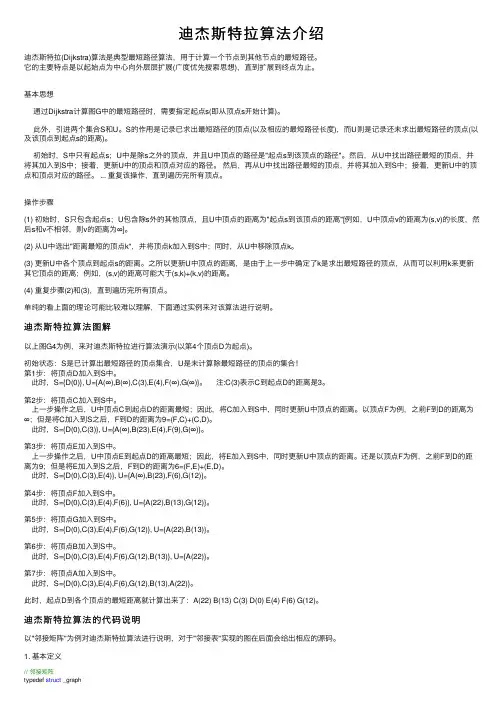
迪杰斯特拉算法介绍迪杰斯特拉(Dijkstra)算法是典型最短路径算法,⽤于计算⼀个节点到其他节点的最短路径。
它的主要特点是以起始点为中⼼向外层层扩展(⼴度优先搜索思想),直到扩展到终点为⽌。
基本思想通过Dijkstra计算图G中的最短路径时,需要指定起点s(即从顶点s开始计算)。
此外,引进两个集合S和U。
S的作⽤是记录已求出最短路径的顶点(以及相应的最短路径长度),⽽U则是记录还未求出最短路径的顶点(以及该顶点到起点s的距离)。
初始时,S中只有起点s;U中是除s之外的顶点,并且U中顶点的路径是"起点s到该顶点的路径"。
然后,从U中找出路径最短的顶点,并将其加⼊到S中;接着,更新U中的顶点和顶点对应的路径。
然后,再从U中找出路径最短的顶点,并将其加⼊到S中;接着,更新U中的顶点和顶点对应的路径。
... 重复该操作,直到遍历完所有顶点。
操作步骤(1) 初始时,S只包含起点s;U包含除s外的其他顶点,且U中顶点的距离为"起点s到该顶点的距离"[例如,U中顶点v的距离为(s,v)的长度,然后s和v不相邻,则v的距离为∞]。
(2) 从U中选出"距离最短的顶点k",并将顶点k加⼊到S中;同时,从U中移除顶点k。
(3) 更新U中各个顶点到起点s的距离。
之所以更新U中顶点的距离,是由于上⼀步中确定了k是求出最短路径的顶点,从⽽可以利⽤k来更新其它顶点的距离;例如,(s,v)的距离可能⼤于(s,k)+(k,v)的距离。
(4) 重复步骤(2)和(3),直到遍历完所有顶点。
单纯的看上⾯的理论可能⽐较难以理解,下⾯通过实例来对该算法进⾏说明。
迪杰斯特拉算法图解以上图G4为例,来对迪杰斯特拉进⾏算法演⽰(以第4个顶点D为起点)。
初始状态:S是已计算出最短路径的顶点集合,U是未计算除最短路径的顶点的集合!第1步:将顶点D加⼊到S中。
此时,S={D(0)}, U={A(∞),B(∞),C(3),E(4),F(∞),G(∞)}。
高德算路使用的算法
高德地图的算路使用了多种算法来实现路线规划和导航功能。
其中最常见的算法包括Dijkstra算法、A算法和实时交通数据分析算法。
Dijkstra算法是一种用于计算图中单源最短路径的经典算法。
在路线规划中,Dijkstra算法被用来找到起点到终点的最短路径,考虑了道路的距离和交通状况等因素。
A算法是一种启发式搜索算法,结合了Dijkstra算法的最短路径搜索和启发式函数的估计,能够更快地找到最优路径。
在路线规划中,A算法可以更高效地搜索最短路径,尤其在复杂的道路网络中表现优异。
除了传统的路径规划算法外,高德地图还利用实时交通数据分析算法来动态调整路线规划。
通过收集和分析实时交通数据,包括道路拥堵情况、交通事故等,高德地图可以实时调整推荐的路线,以提供用户更准确、实时的导航信息。
综合来看,高德地图的算路使用了多种经典和实时的算法来实
现路线规划和导航功能,确保用户能够获得准确、高效的导航体验。
这些算法的综合运用使得高德地图在路线规划和导航方面具有较高
的精度和实用性。
路径优化算法范文以下是几种常见的路径优化算法:1. Dijkstra算法Dijkstra算法是一种常用的最短路径算法,可以求解从一个起点到其他所有点的最短路径。
该算法适用于没有负权边的图,通过不断更新节点到起点的距离来求解最短路径。
2.A*算法A*算法是一种启发式算法,可以用于在地图上找到最短路径。
该算法结合了Dijkstra算法的广度和贪心算法的启发式。
通过估算目标节点到终点的距离,A*算法根据当前节点的代价和下一个节点的估价来选择最优路径。
3.动态规划算法动态规划算法可以用于解决一些复杂的路径规划问题。
该算法可以将问题分解成多个子问题,并通过记忆化来避免重复计算。
动态规划算法在一些场景下可以提供更快的计算速度和更优的路径解。
4.遗传算法遗传算法是一种模拟生物进化过程的优化算法,可以用于求解路径优化问题。
该算法通过模拟自然选择、交叉和变异等过程,逐渐优化路径解。
遗传算法通常适用于复杂的路径规划问题,但计算成本较高。
5.蚁群算法蚁群算法是一种仿生算法,模拟了蚂蚁寻找食物的行为。
该算法可以用于解决路径规划问题。
蚁群算法通过模拟蚂蚁在路径上释放信息素的过程,来寻找最优路径。
该算法适用于动态环境和多目标优化问题。
6.模拟退火算法模拟退火算法是一种元启发算法,用于在解空间中最优解。
该算法通过模拟金属退火过程的温度变化来获取全局最优解。
模拟退火算法可以用于解决路径优化问题,并可以处理非连续、非凸的优化问题。
除了上述算法,还有一些其他的路径优化算法,如禁忌算法、粒子群算法等。
每种算法都有不同的适用场景和优化目标。
在实际应用中,我们通常根据具体的问题和需求选择合适的算法。
总而言之,路径优化算法是一种用于优化路径规划问题的算法。
通过选择合适的算法,我们可以寻找到最佳路径,降低成本、节省时间、提高效率。
路径优化算法在交通导航、物流配送、无人机航线规划等领域都有广泛的应用前景。
图的最短路径算法及其在网络中的应用摘要:图论是当代计算机网络重要的理论基础之一,它是计算机网络的抽象模型,是人们认识和把握计算机网络整体结构的有力手段。
图论中的最短路径算法在计算机网络的路由、优化和架构设计等方面起到了举足轻重的作用,为当代庞大的Internet的实现奠定了理论基础。
探究了图的最短路径算法及其在计算机网络中的应用。
关键词:图论;最短路径算法;计算机网络路由算法; Dijkstra 算法; Bellman-Ford算法1图及最短路径算法1.1图的定义图(Graph)是由非空的顶点集合V和描述顶点间关系的弧(或边)的集合E组成的二元组,即:G=(V,E)(1)其中,V={vi∈dataobject},E={<vi ,vj>| vi ,vj ∈V} ,dataobject是具有相同性质的数据元素(即顶点)的集合;<vi,vj>表示从vi到vj有一条边单向相连称作弧,且称vi为弧尾(起点),vj为弧头(终点),此时称图为有向图。
若<vi,vj>∈E,必有<vj,vi>∈E,则可以用无序对(vi ,vj)代替这两个有序对,即从vi 到vj相连称作边,此时图称为无向图。
图1展现了一个典型的无向图。
图1典型无向图示意图中的最短路径问题大体可以分为两大类:单源最短路径问题和任意两点间最短路径问题,由于路由算法只涉及单源最短路径问题,因此这里我们只讨论单源最短路径算法。
所谓单源最短路,是从图G=(V,E)中找出从给定源节点s∈V到V中的每个节点的最短路径。
通常,计算单源最短路有两种经典的算法,即Dijkstra算法和Bellman-Ford算法,我们先来讨论一下这两种算法。
1.2最短路径算法1.2.1基于贪心思想的Dijkstra算法Dijkstra算法是一种按路径长度递增的次序产生的最短路径的算法。
它把图中所有的顶点分为两组,第一组是已确定最短路径的顶点集合S,第二组是尚未确定最短路径的集合V-S;把V-S中的顶点按照最短路径长度递增的顺序逐个添加到S中,添加过程中始终保持从V到S中每个顶点的最短路径长度都不大于从V到V-S中任何顶点的最短路径长度,直到从V出发可以到达的顶点都在S中为止。
迪杰斯特拉和弗洛伊德算法1. 简介迪杰斯特拉(Dijkstra)算法和弗洛伊德(Floyd)算法是图论中两个重要的最短路径算法。
最短路径问题是图论中的经典问题之一,它的目标是找到两个节点之间的最短路径。
迪杰斯特拉算法是由荷兰计算机科学家Edsger W. Dijkstra于1956年提出的,用于解决带权有向图中的单源最短路径问题。
它采用了贪心策略,通过逐步扩展已找到的最短路径来逐步确定最短路径。
弗洛伊德算法是由美国计算机科学家Robert W. Floyd于1962年提出的,用于解决带权有向图中的多源最短路径问题。
它采用了动态规划的思想,通过逐步更新所有节点之间的最短路径来求解最短路径问题。
2. 迪杰斯特拉算法2.1 算法思想迪杰斯特拉算法通过维护一个距离数组和一个已访问数组来求解最短路径。
距离数组用于记录源节点到其他节点的最短距离,已访问数组用于标记已经确定最短路径的节点。
算法的基本思想是从源节点开始,每次选择一个距离最小且未访问过的节点,将其标记为已访问,并更新与其相邻节点的最短距离。
重复这个过程,直到所有节点都被标记为已访问。
2.2 算法步骤迪杰斯特拉算法的具体步骤如下:1.创建一个距离数组dist[],用于记录源节点到其他节点的最短距离。
初始时,将源节点到其他节点的距离都设置为无穷大,将源节点的距离设置为0。
2.创建一个已访问数组visited[],用于标记已经确定最短路径的节点。
初始时,将所有节点的已访问状态都设置为false。
3.重复以下步骤,直到所有节点都被标记为已访问:–选择一个距离最小且未访问过的节点u。
–将节点u标记为已访问。
–更新与节点u相邻节点v的最短距离:•如果通过节点u可以获得比dist[v]更短的距离,则更新dist[v]为新的最短距离。
4.最终,距离数组dist[]中记录的就是源节点到其他节点的最短距离。
2.3 算法示例假设有一个带权有向图如下所示:2(1)-->--(3)| / |4 | / | 1| / |(0)-->--(2)3源节点为节点0,我们希望求解源节点到其他节点的最短路径。
从某个源点到其它各顶点间的最短路径这里路径指两顶点间的通路,路径的长度指所有经过的边的总长。
“最短路径”的问题指当两个顶点间通路多于一条时,如何找出边长总和为最短的那条。
Dijkstra 提出按路径长度递增的次序求最短路径的方法。
1、 Dijkstra 求最短路径的基本思想 把顶点分成两组,第一组是已确定最短路径的结点的集合,第二组是尚未确定最短路径的结点的集合。
按路径长度递增的次序逐个把第二组的顶点放到第一组中。
设求从v0到其它各顶点间的最短路径,则在任意时刻,从v0到第一组各顶点间的最短路径都不大于从v0到第二组各顶点间的最短路径。
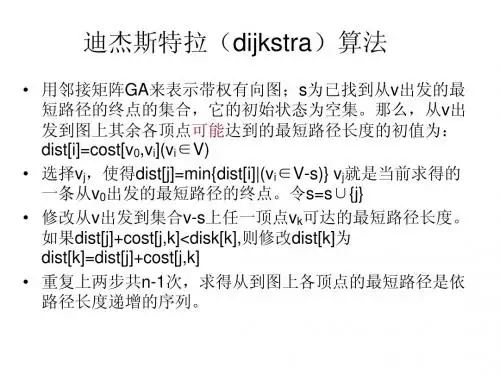
2、Dijkstra 求最短路径的步骤设图以邻接矩阵arcs 存储,矩阵中各元素的值为各边的权值。
顶点间无边时其对应权值用无穷大表示。
从顶点v0到其它各顶点间的最短路径的具体步骤如下:(1)初始化:第一组(集合s )只含顶点v0,第二组(集合v-s )含有图中其余顶点。
设一dist 向量,其下标是各顶点,元素值是顶点v0到各顶点的边的权值。
若v0到某顶点无边,dist 向量中的对应值为无穷大。
(2)选dist 中最小的权值,将其顶点(j )加入s 集合。
s=s {j}(3)修改从顶点v0到集合t(t=V -s)中各顶点的最短路径长度,如果 dist[j]+arcs[j][k]<dist[k] 则修改dist[k]为dist[k]=dist[j]+arcs[j][k] (4) 重复(2)、(3)n-1次。
由此求得v0到图上其余各顶点得最短路径。
3、例:求下图从v0到其余各顶点的最短路径。
图7.34 一个带权有向图G6图的邻接矩阵如下:⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞∞=6020105051003010.arcs G算法(程序)如下:/* 用邻接矩阵表示的图的Dijkstra算法的源程序2010年11月16日修改*/#include <stdio.h>#include <limits.h>#define INFINITY INT_MAX#define MAXVEX 6#define FALSE 0#define TRUE 1typedef char V exType;typedef float AdjType;typedef struct{ int vexnum; /* 图的顶点个数*/V exType vexs[MAXVEX]; /* 顶点信息*/AdjType arcs[MAXVEX][MAXVEX]; /* 边信息*/}MGraph;void ShortestPath_DIJ(MGraph &G,int p[][MAXVEX],AdjType D[]){ int v,w,i,j;AdjType min;int final[MAXVEX]; //final[v]为TRUE当且仅当v∈s,即已求得从v0到v的最短路径for(i=0;i<G.vexnum;i++){ final[i]=FALSE; D[i]=G.arcs[0][i];for(w=0;w<G.vexnum;w++) p[i][w]=FALSE; /*设空路径*/if(D[i]<INFINITY) /*如果V0到V i有直接路径则置p[i][0]和p[i][i]为1*/{ p[i][0]=TRUE;p[i][i]=TRUE;}}/*for语句结束*/D[0]=0; final[0]=TRUE; /* 初始化,表示顶点v0在集合S中*/for(i=1;i<G.vexnum;i++)/*开始主循环,每次求得v0到某个v顶点的最短路径,并加v到s集*/{ min=INFINITY;for(w=0;w<G.vexnum;w++) /*在V-S中选出距离值最小顶点*/if(!final[w]&&D[w]<min) /*w顶点离v0顶点是更近*/{ v=w; min=D[w]; }final[v]=TRUE; /*离v0最近的v加入S集*/for(w=0;w<G.vexnum;w++) /*更新当前最短路径及距离*/if(!final[w]&&(min+G.arcs[v][w]<D[w])) /*修改D[w]和p[w],w∈v-S*/{ D[w]=min+G.arcs[v][w]; /*修改路径长度*/for(j=0;j<G.vexnum;j++)p[w][j]=p[v][j]; /*修改路径为经过v到达w*/p[w][w]=TRUE;} /*if结束*/}/*for结束*/}/*ShortestPath_DIJ结束*/void main() { int i,j;MGraph G;AdjType D[MAXVEX]; /*D(v)为v0到v 的路径长度*/int p[MAXVEX][MAXVEX]; /*p(v)记录v0到v 的最短路径,若p[v][w]为TRUE ,则w 是从v0到v 当前求得最短路径上的顶点*/ G .vexnum=6;for(i=0;i<G .vexnum;i++)for(j=0;j<G .vexnum;j++)G .arcs[i][j]=INFINITY ; /*G 数组初始化最大值*/ G .arcs[0][2]=10; G .arcs[0][4]=30; G .arcs[0][5]=100; G .arcs[1][2]=5; G .arcs[2][3]=50; G .arcs[3][5]=10; G .arcs[4][3]=20; G .arcs[4][5]=60; ShortestPath_DIJ(G ,p,D);for(i=0;i<G .vexnum;i++) /*以邻接矩阵形式输出图*/ { for(j=0;j<G .vexnum;j++)printf("%12.0f",G .arcs[i][j]); printf("\n"); }for(i=0;i<G .vexnum;i++) /*输出V0到其它各顶点的路径*/ { for(j=0;j<G .vexnum;j++)printf("%3d",p[i][j]); printf("\n"); }for(i=0;i<G .vexnum;i++) /*输出V0到其它各顶点的最短距离*/ printf("%.0f ",D[i]); }final 、D 和p 数组的初始状态:fina l =⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡000000 D =⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡1003032767103276732767 ⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡=101010*********000101000000000000p 下标=⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡543210 输出:32767要换成214748364832767 32767 10 32767 30 100 32767 32767 5 32767 32767 3276732767 32767 32767 50 32767 32767 32767 32767 32767 32767 32767 10 32767 32767 32767 20 32767 60 32767 32767 32767 32767 32767 32767D 数组的变化情况final 、D 和p 数组的终止状态:fina l =⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡111111 D =⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡60305010327670 ⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡=1111010*********000101000000000000p 下标=⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡543210 其中P 中记录的是最短路径,D 数组记录的是最短距离。
dijkstra算法公式
Dijkstra算法是一种用于解决最短路径问题的经典算法。
它的主要目标是找到一个节点到图中所有其他节点的最短路径。
算法的公式可以表示为:
1. 创建一个包含所有节点的集合Q,并将起始节点标记为0。
2. 初始化一个距离数组dist,用于存储每个节点到起始节点的最短距离。
将起始节点的距离设为0,其余节点的距离设为无穷大。
3. 当Q集合非空时,执行以下步骤:
a. 从dist数组中选择距离最小的节点u,并将其从Q中移除。
b. 遍历u的所有邻居节点v,计算节点v到起始节点的距离new_dist。
如果new_dist小于dist[v],则更新dist[v]为new_dist。
4. 重复步骤3,直到Q集合为空。
在实际应用中,Dijkstra算法的实现通常使用优先队列来选择最小距离节点,以提高算法的效率。
算法的核心思想是不断更新节点的最短距离,直到找到所有节点的最短路径。
除了计算最短路径之外,Dijkstra算法还可以用于解决其他问题,例如图的连通性问题和网络流量优化问题等。
然而,需要注意的是,Dijkstra算法只适用于没有负权边的图。
如果图中存在负权边,那么需要使用其他算法,如Bellman-Ford算法或SPFA算法来解决最短路径问题。
总之,Dijkstra算法是一种非常实用的算法,它能够解决最短路径问题,并在实际应用中发挥重要作用。
通过理解和掌握Dijkstra算法的公式,我们可以更好地应用它来解决各种实际问题。
解最短路径问题的两种方法及其应用
最短路径问题是指在一张带权图中找到两个节点之间最短的路径。
最短路径问题是许多计算机科学和应用领域中的一个基本问题。
以下是解决这个问题的两种方法:
1. Dijkstra算法:Dijkstra算法是解决最短路径问题的一种
基本算法,它是基于贪心思想的。
该算法首先确定起始点到其他节
点的距离(记为d),然后不断扩大已确定最短距离的节点集,直
到覆盖所有节点。
Dijkstra算法适用于单源最短路径,即从一个节
点到所有其他节点的最短路径。
2. Floyd算法:Floyd算法也是一种经典的解决最短路径问题
的算法,它是一个动态规划算法。
该算法利用动态规划的思想,通
过比较任意两个节点之间经过第三点(中转点)的路径长度,更新
路径长度。
Floyd算法适用于多源最短路径,即从任意两个节点之
间的最短路径。
这两种算法可广泛应用于各种计算机科学和应用领域,如网页
排名算法、图像处理、计算机网络等。
在实际应用中,我们需要根
据实际问题的特点,选择最适合的算法。